Результат интеллектуальной деятельности: СПОСОБ ПОДГОТОВКИ И ТРАНСПОРТИРОВКИ ГОРНОЙ МАССЫ ПРИ РАЗРАБОТКЕ ГЛУБОКОЗАЛЕГАЮЩИХ МЕСТОРОЖДЕНИЙ И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к горной промышленности и может быть использовано при разработке глубокозалегающих месторождений, в том числе рудных и россыпных - редких и благородных металлов, открытым способом.
Известен способ загрузки горной массы в автосамосвалы, включающий возможность передвижения модулей с бункерами и подачу горной массы в бункеры с вместимостью, соответствующей грузоподъемности используемых самосвалов, осуществление независимых процессов позиционирования одного из бункеров при погрузке в автосамосвал с позиционированием другого бункера под загрузку. Осуществление независимых процессов позиционирования бункеров происходит одновременно с рабочим процессом карьерного комбайна при автоматизации процесса ориентации комплекса для осуществления погрузки относительно карьерного комбайна, а автосамосвала - относительно комплекса для осуществления погрузки, при этом реализация независимых процессов позиционирования бункеров происходит посредством перемещения рам бункеров в вертикальной плоскости и кареток бункеров - в горизонтальной плоскости и управляется посредством механизмов вертикального перемещения и механизмов горизонтального перемещения, при этом бункеры посредством шарнирных связей с каретками имеют возможность поворота в вертикальной плоскости с помощью телескопических механизмов поворота, а рамы бункеров при перемещении входят во взаимодействие посредством опор скольжения с вертикальными направляющими [1-3].
Способ загрузки горной массы в автосамосвалы через комплекс для осуществления погрузки позволяет обеспечить непрерывность работы карьерного комбайна и перегрузки горной массы, однако функционально не обеспечивает необходимой последовательности ведения работ.
Известен способ, включающий создание на борту карьера дробильно-перегрузочных пунктов на базе дробилок крупного и среднего дробления для транспортирования горной массы конвейерами с наклоном 35-40°. Микровоздействие на крупные куски осуществляют интенсивным центральным ударом массивных молотов для дробления крупнокусковой фракции, приводящим к образованию 2-3 крупных и группу мелких осколков, перемещаемых с помощью щетка для очистки и перемещения материала к другому быстродействующему молоту для последующего снижения их размеров до 200-250 мм и передачи в мобильные конусные дробилки среднего дробления. Дробленый материал малой крупности поступает на крутонаклонные конвейеры для повышения мобильности и быстрого перемещения из одного места в другое, дробильные устройства выполняют в виде вертикальных модулей и располагают горизонтально [4].
Недостатком способа являются низкие надежность работы системы и технологическая эффективность.
Известно устройство для погрузки породы в средства транспорта, включающее металлоконструкцию из двух поворотных стенок и опорные стойки [5].
Способ имеет функциональные ограничения и не способен выполнять необходимые задачи.
Наиболее близким по технической сущности является погрузочное устройство, которое содержит питатель и приемную емкость, выполненную в виде ковша с днищем и боковыми стенками. Задняя стенка ковша выполнена в виде цилиндрической обечайки, вокруг которой могут поворачиваться днище и связанные с ним боковые стенки. Цилиндрическая обечайка охватывает питатель и имеет разгрузочное отверстие, через которое производится загрузка питателя. Разгрузочное отверстие может быть перекрыто колосниками для отсева негабарита [6].
Способ не обеспечивает достаточную эффективность подготовки и транспортировки горной массы при разработке месторождений полезных ископаемых и надежность управления технологическим процессом.
Технический результат заключается в повышении эффективности подготовки и транспортировки горной массы при разработке глубокозалегающих месторождений полезных ископаемых и надежности управления технологическим процессом.
Технический результат достигается тем, что в способе подготовки и транспортировки горной массы при разработке глубокозалегающих месторождений, включающем размещение автоматизированного комплекса с помощью ходового оборудования в рабочей зоне загрузки автосамосвалами горной массы, установку сопрягаемого с автоматизированным комплексом конвейера, независимое позиционирование под загрузку горной массы установленных с двух сторон рамы с возможностью независимого друг от друга поворота относительно образующих просеивающую поверхность колосников, приемных емкостей в виде ковшей с днищем и стенками, жестко связанными между собой, осуществляют инсталляцию с проверкой работоспособности функционирования всех систем специального программного обеспечения автоматизированного комплекса, параметризацию компьютеризированной системы управления и контроля, рассчитанную на функциональное выполнение задач автоматизированного комплекса, сообразно полученным технологическим параметрам объекта разработки месторождения и управление рабочим циклом, включающим настройку системы управления поворотом приемных емкостей для приема и последующей равномерной подачи горной массы на просеивающую поверхность, настройку системы управления гидроцилиндрами для позиционирования отвалообразователя крупных фракций, установленного на раме, настройку системы управления приводом перемещения питателя для подачи горной массы, поступающей с просеивающей поверхности, настройку системы управления динамикой автоколебаний для осуществления автоколебаний просеивающей поверхности, выполненной подпружиненной и V-образной формы, посредством вибратора и обеспечения равномерного поступления горной массы через колосники на питатель, настройку системы управления поворотом просеивающей поверхности для осуществления периодических поворотов просеивающей поверхности с помощью привода поворота и подачи крупнокусковых включений в зону отвалообразования, при этом функционирование компьютеризированной системы управления и контроля осуществляется с помощью системы видеонаблюдения и датчиков контроля, в том числе датчиков контроля положения автосамосвалов при позиционировании относительно приемных емкостей.
Автоматизированный комплекс, включающий ходовое оборудование, питатель с приводом перемещения, установленные с двух сторон рамы с возможностью независимого друг от друга поворота относительно колосников, образующих просеивающую поверхность, приемные емкости в виде ковшей с днищем и стенками, жестко связанными между собой, сопрягаемый с автоматизированным комплексом конвейер, отличающийся тем, что снабжен отвалообразователем крупных фракций, установленным на раме с возможностью перемещения с помощью гидроцилиндров, при этом просеивающая поверхность автоматизированного комплекса снабжена вибратором, приводом поворота, выполнена V-образной формы и подпружиненной, при этом автоматизированный комплекс снабжен компьютеризированной системой управления и контроля, связанной с системой управления гидроцилиндрами, системой управления приводом перемещения питателя, системой управления поворотом приемных емкостей для приема и последующей равномерной подачи горной массы на просеивающую поверхность, также связанной с системой управления динамикой автоколебаний просеивающей поверхности в процессе загрузки и системой управления поворотом просеивающей поверхности при подаче крупнокусковых включений в зону отвалообразования, при этом компьютеризированная система управления и контроля снабжена специальным программным обеспечением, системой видеонаблюдения и датчиками контроля, в том числе датчиками контроля положения автосамосвалов при позиционировании относительно приемных емкостей.
Возможность формирования требуемой последовательности выполняемых действий новым способом и предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
Способ подготовки и транспортировки горной массы при разработке глубокозалегающих месторождений и автоматизированный комплекс изображены на чертежах.
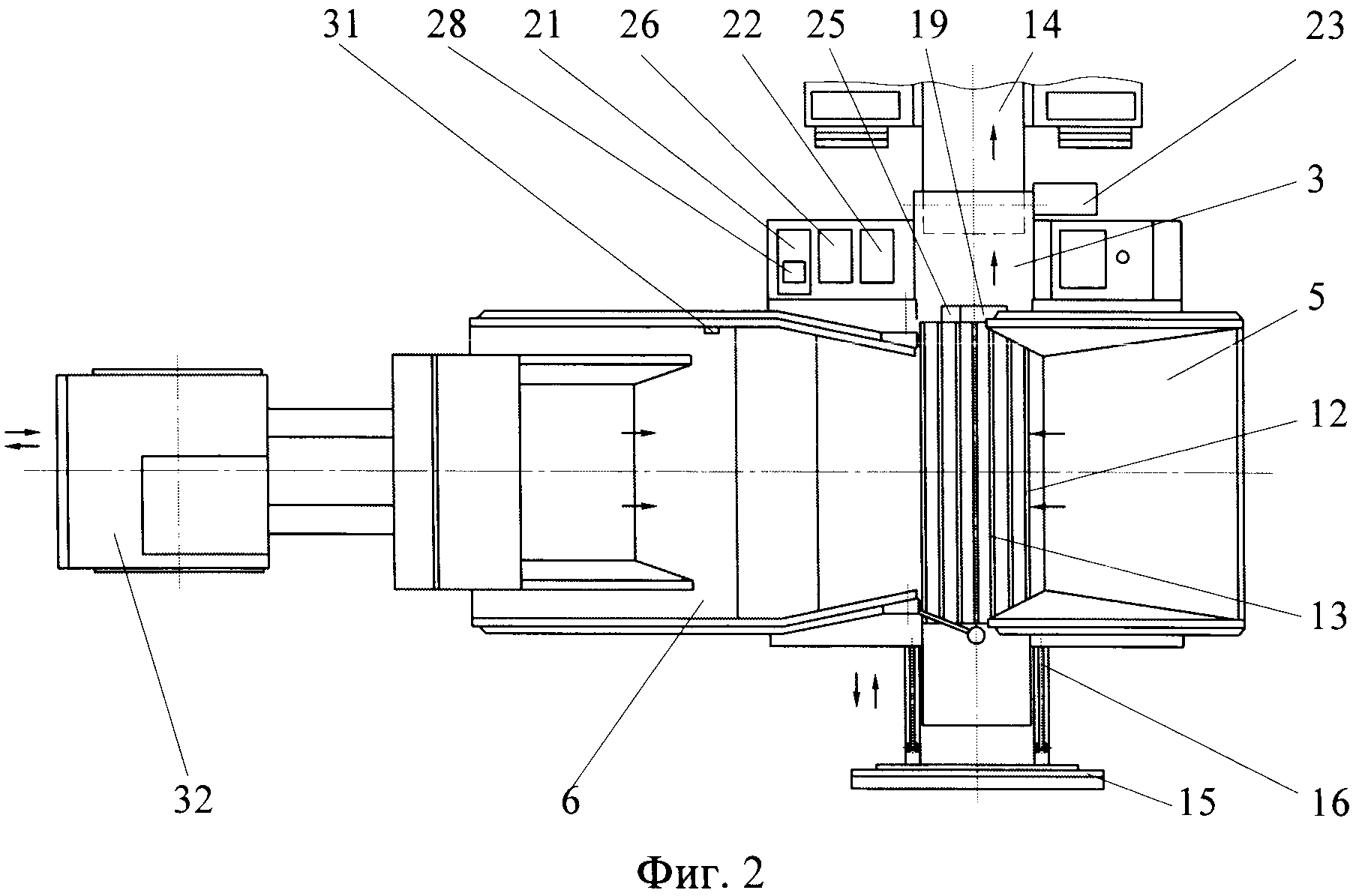
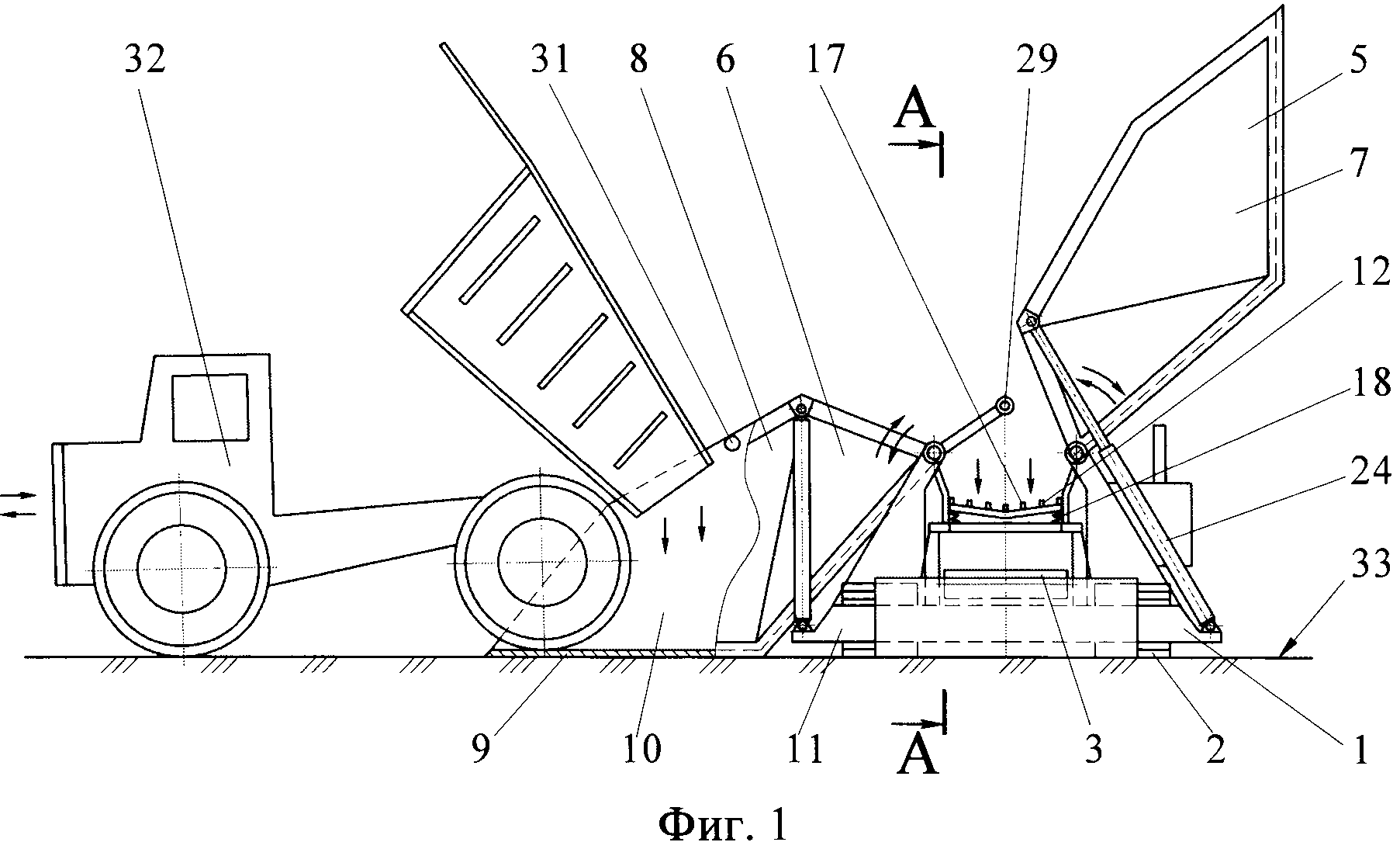
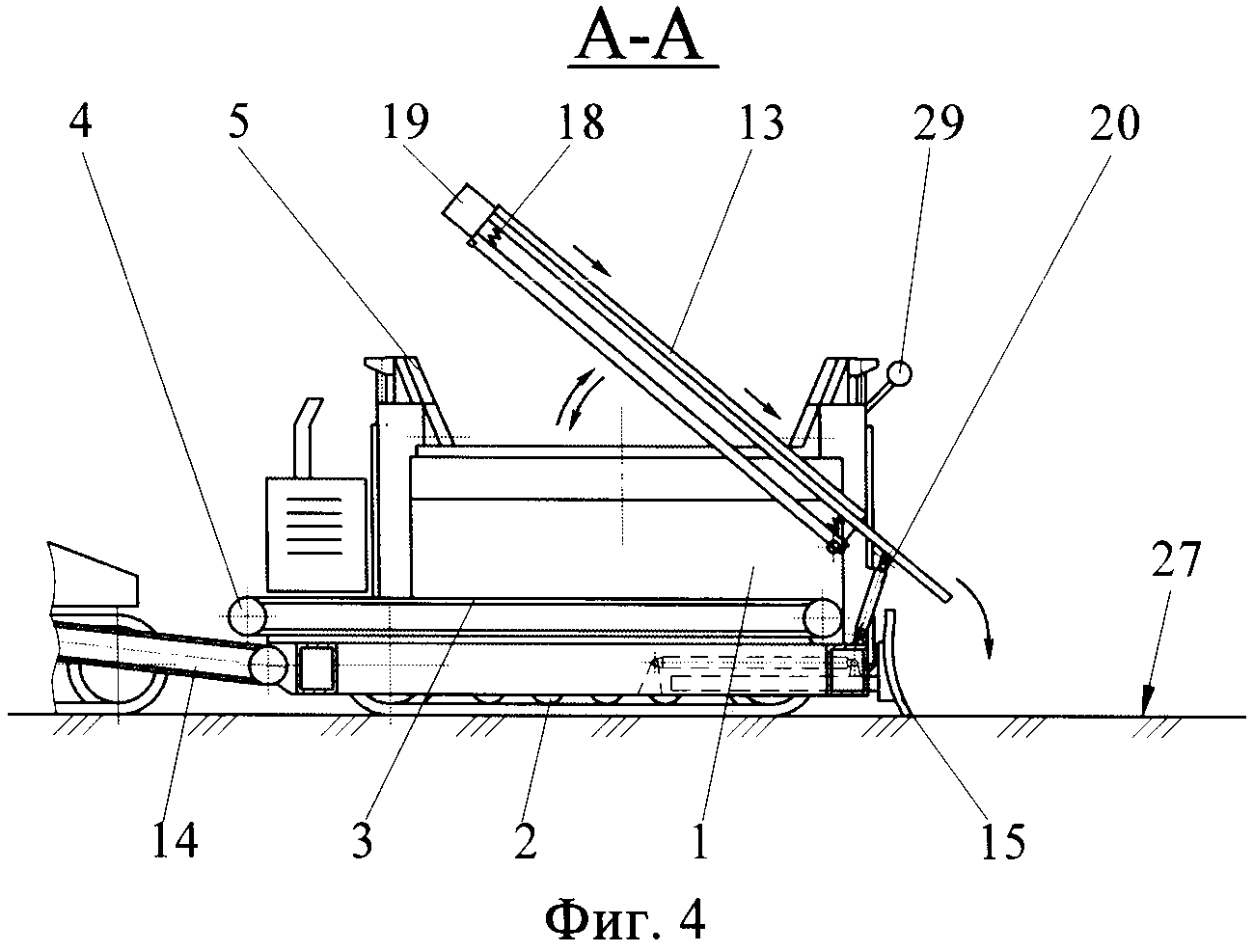
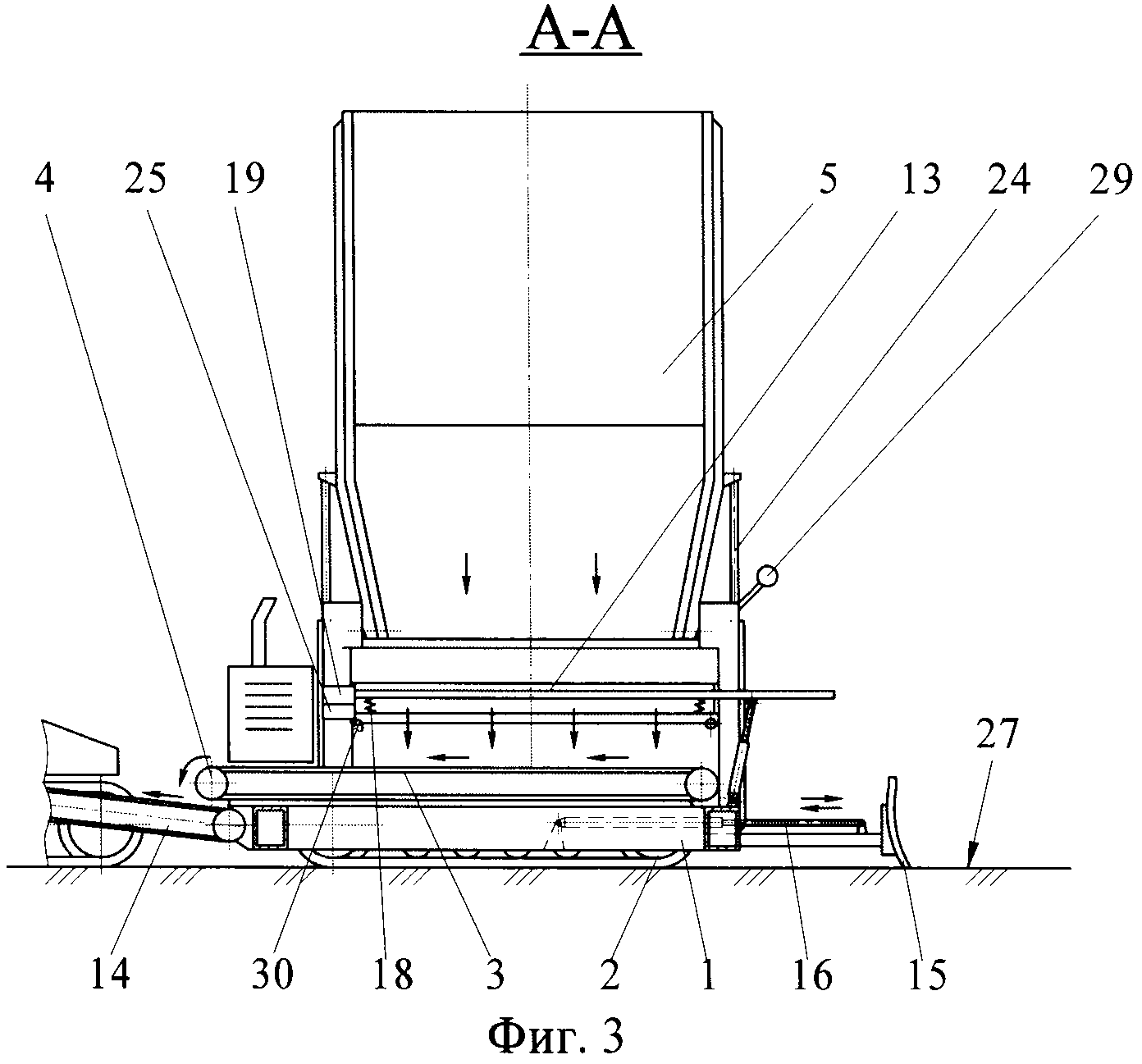
На фиг. 1 - общий вид автоматизированного комплекса при загрузке горной массы автосамосвалом; на фиг. 2 - вид сверху на фиг. 1; на фиг. 3 - разрез А-А- на фиг. 1, в начальном рабочем положении; на фиг. 4 - разрез А-А- на фиг. 1, просеивающая поверхность изображена в поднятом положении.
Автоматизированный комплекс 1 снабжен ходовым оборудованием 2, питателем 3 с приводом перемещения 4, приемными емкостями 5, 6 в виде ковшей 7, 8 с днищем 9 и стенками 10, жестко связанными между собой. Приемные емкости 5, 6 устанавливают с двух сторон рамы 11 с возможностью независимого друг от друга поворота относительно колосников 12, образующих просеивающую поверхность 13. Позиционирование конвейера 14 осуществляется в сопряжении с автоматизированным комплексом 1. Отвалообразователь крупных фракций 15 установлен на раме 11 с возможностью перемещения с помощью гидроцилиндров 16. Просеивающая поверхность 13 выполнена V-образной формы 17, подпружиненной 18, снабжена вибратором 19 и приводом поворота 20. Автоматизированный комплекс 1 снабжен компьютеризированной системой управления и контроля 21, которая связана с системой управления гидроцилиндрами 22, системой управления приводом перемещения питателя 23, системой управления поворотом приемных емкостей 24, системой управления динамикой автоколебаний 25 просеивающей поверхности 13, системой управления поворотом просеивающей поверхности 26 при подаче крупнокусковых включений в зону отвалообразования 27.
Компьютеризированная система управления и контроля 21 снабжена специальным программным обеспечением 28, системой видеонаблюдения 29 и датчиками контроля 30, в том числе датчиками контроля 31 положения автосамосвалов 32 при позиционировании относительно приемных емкостей 5, 6. Размещение автоматизированного комплекса 1 осуществляется в рабочей зоне загрузки 33 горной массы автосамосвалами 32.
Способ подготовки и транспортировки горной массы при разработке глубокозалегающих месторождений реализуется следующим образом.
Осуществляют размещение автоматизированного комплекса 1 с помощью ходового оборудования 2 в рабочей зоне загрузки 33 горной массы автосамосвалами 32. Производят установку сопрягаемого с автоматизированным комплексом 1 конвейера 14. Осуществляют независимое позиционирование приемных емкостей 5, 6 под загрузку горной массы автосамосвалами 32. Приемные емкости 5, 6 установлены с двух сторон рамы 11 с возможностью независимого друг от друга поворота относительно образующих просеивающую поверхность 13 колосников 12. Для исключения просыпания приемные емкости 5, 6 выполнены в виде ковшей 7, 8 с днищем 9 и стенками 10, жестко связанными между собой. Для обеспечения надежности и безопасности работы автоматизированного комплекса 1 производят инсталляцию с проверкой работоспособности функционирования всех систем специального программного обеспечения 28 автоматизированного комплекса 1. Последовательно осуществляют параметризацию компьютеризированной системы управления и контроля 21, рассчитанную на функциональное выполнение задач автоматизированного комплекса 1, сообразно полученным технологическим параметрам объекта разработки месторождения. Управление рабочим циклом включает настройку системы управления поворотом приемных емкостей 24 для обеспечения приема и последующей равномерной подачи горной массы на просеивающую поверхность 13. Осуществляют настройку системы управления гидроцилиндрами 22 для позиционирования отвалообразователя крупных фракций 15, установленного на раме 11, и осуществления с помощью гидроцилиндров 16 периодического перемещения крупных фракций из зоны отвалообразования 27. Производят настройку системы управления приводом перемещения питателя 23, которая включает привод перемещения 4 и обеспечивает подачу горной массы, поступающей с просеивающей поверхности 13, на конвейер 14. Осуществляют настройку системы управления динамикой автоколебаний 25 для осуществления автоколебаний просеивающей поверхности 13, выполненной подпружиненной 18 и V-образной формы 17. Автоколебания просеивающей поверхности 13 осуществляются посредством вибратора 19 для обеспечения дезинтеграции, классификации и равномерного поступления горной массы через колосники 12 на питатель 3. Производят настройку системы управления поворотом просеивающей поверхности 26, включающей привод поворота 20, для осуществления подачи крупнокусковых включений в зону отвалообразования 27. Функционирование компьютеризированной системы управления и контроля 21 осуществляется с помощью системы видеонаблюдения 29 и датчиков контроля 30, в том числе датчиков контроля 31 положения автосамосвалов 32 при позиционировании относительно приемных емкостей 5, 6.
Благодаря автоматизации процесса способ обеспечивает высокую производительность подготовки и транспортировки горной массы, надежность управления технологическим процессом при разработке месторождений полезных ископаемых, в том числе редких и благородных металлов.
Источники информации
1. Пат. 2530962 Российская Федерация, МПК Е21С 41/26; Е21С 47/06. Способ загрузки горной массы в автосамосвалы и комплекс для осуществления погрузки / Чебан А.Ю., Шемякин С.А., Хрунина Н.П.; заявитель и патентообладатель Федеральное гос. бюдж. учреждение науки Ин-т горного дела ДВО РАН. - №2013138773; заявл. 20.08.2013; опубл. 20.10.2014, Бюл. №29.
2. Чебан А.Ю., Хрунина Н.П. Техника и технологии разработки месторождений цементного сырья на Дальнем Востоке и перспективы их развития / Чебан А.Ю., Хрунина Н.П. // Системы. Методы. Технологии. 2014. №1 (21). С. 131-135.
3. Cheban, A. Yu., Sekisov G.V., Khrunina N.P., Shemyakin S.A. Upgrading continuous and cyclic excavation and transportation during open-pit mining [Текст] / A. Yu. Cheban, G.V. Sekisov, N.P. Khrunina, S.A. Shemyakin // Eurasian mining. - 2014. - №1. - P. 22-24.
4. Патент №2495246, E21C 41/26. Способ подготовки горной массы для транспортирования крутонаклонными конвейерами.
5. Авторское свидетельство №1709091 от 02.02.1990 г. Устройство для погрузки породы в средства транспорта.
6. Патент №2084628, Е21С 41/00. Погрузочное устройство.
Способ инициирования кавитационно-гидродинамической микродезинтеграции минеральной составляющей гидросмеси
Способ разработки сложноструктурных глубокозалегающих россыпей
Комбинированный способ дезинтеграции горного массива при разработке тонких рудных жил
Способ освоения месторождения штокверкового типа
Способ послойной разработки сложноструктурных месторождений кимберлитов
Способ разработки месторождений твердых полезных ископаемых
Способ активизации микродезинтеграции полиминеральной составляющей гидросмеси
Способ кавитационно-гидродинамической микродезинтеграции полиминеральной составляющей гидросмеси
Способ разработки нефтяных месторождений
Способ разработки тонких рудных жил

