Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО ОБЪЕКТА ПОСЛЕ ОТДЕЛЕНИЯ ОТ ДРУГОГО КОСМИЧЕСКОГО ОБЪЕКТА
Вид РИД
Изобретение
Предлагаемый способ может быть использован в космической технике при управлении движением космического объекта (КО), например пилотируемого космического корабля (ПКК), после его отделения в заданном направлении от другого космического объекта (ДКО), например ракетоносителя (РН), выводящего ПКК на опорную орбиту.
Известен способ управления движением КО, в котором для построения ориентации сразу после отделения от РН используются данные с датчиков углов поворота гиростабилизированной платформы (ГСП), которая на старте имела определенное известное положение (Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974), выбранный в качестве аналога (фиг. 1). Далее на основе информации о повороте ГСП определяется кватернион разворота КО относительно его известной начальной ориентации по формуле:
 ,
,
где φ, ψ, θ - угловые рассогласования между текущим и начальным положением ГСП (φ0, ψ0, θ0) в каналах, тангажа, рысканья и крена соответственно. После определения угловых рассогласований между текущим и требуемым угловым положением к КО прикладывается серия импульсов для осуществления разворота в требуемую угловую ориентацию.
Основным недостатком этого способа является то, что ГСП значительно превосходит по массе бесплатформенные навигационные системы и по этой причине не может быть использована на многих КО. При использовании ГСП необходимо учитывать ограничения по углам поворота карданового подвеса ГСП, что приводит к дополнительному расходу топлива для обхода запрещенных зон при разворотах. Также при использовании ГСП невозможно продолжительное, в течение нескольких часов, управление по данным датчиков углов ГСП ввиду уходов направления кинетического момента гироскопа от начального направления. Кроме того, крайне нежелательно включение датчиков управления до старта, так как на участке выведения возможно их разрушение вследствие значительных перегрузок.
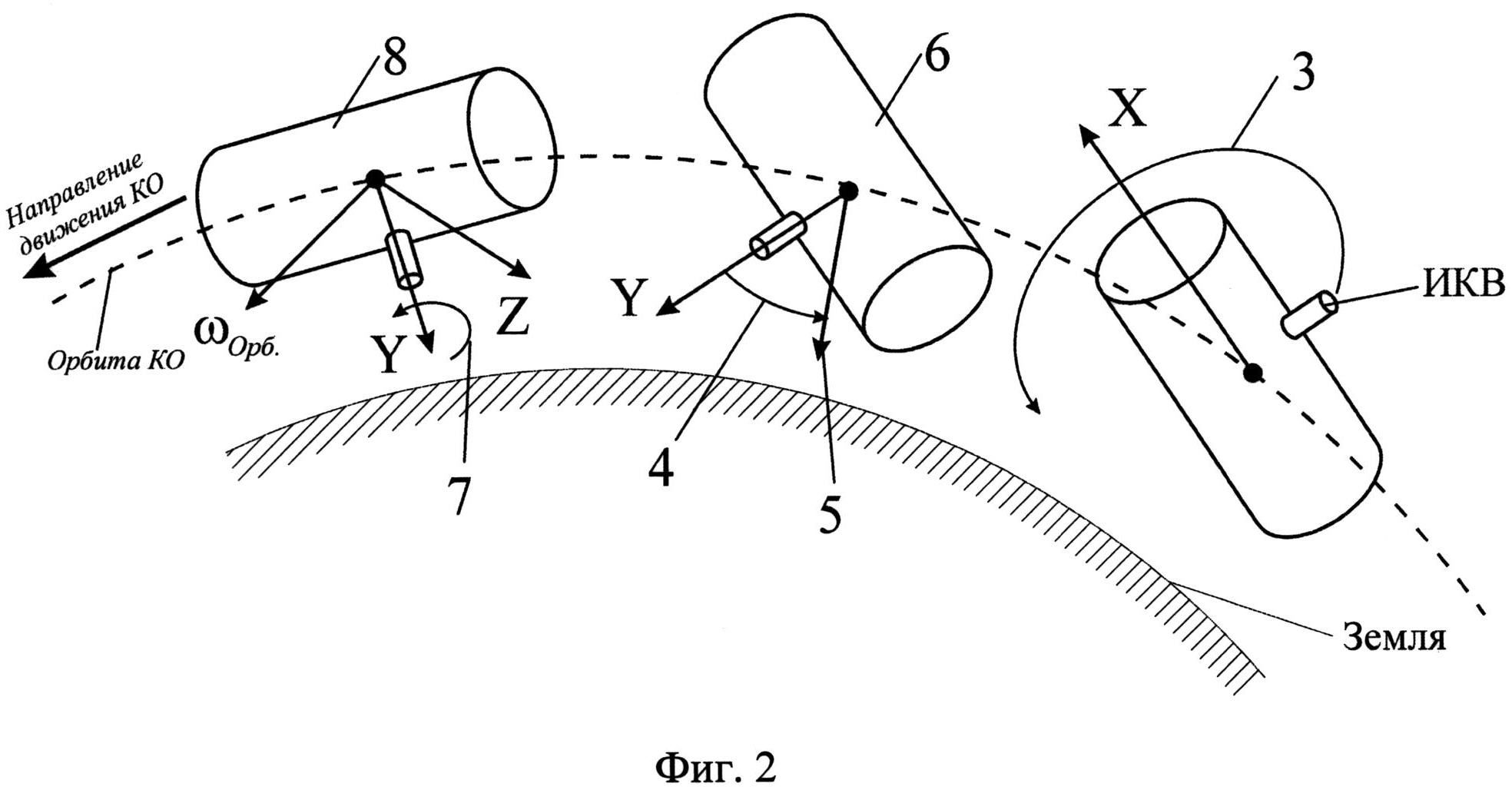
Известен способ управления движением КО после его отделения от другого КО, выбранный в качестве прототипа, в котором для определения ориентации используется датчик инфракрасной вертикали (ИКВ) (Легостаев В.П., Микрин Е.А., Орловский И.В., Борисенко Ю.Н., Платонов В.Н., Евдокимов С.Н. Создание и развитие систем управления движением космических кораблей «Союз» и «Прогресс»: опыт эксплуатации, планируемая модернизация // Сборник статей. Москва, МФТИ, 2009.) (фиг. 2). В этом способе после поступления первых измерений угловой скорости через время Δt к КО прикладывают серию импульсов, совершающих ряд последовательных разворотов для обеспечения нахождения диска Земли в поле зрения датчика ИКВ. Затем, уже по показаниям датчика ИКВ, к КО прикладывают серию импульсов, совмещающих видимый центр Земли с центром обзора датчика ИКВ. Далее, по изменению компонент угловой скорости в плоскости, перпендикулярной направлению на центр Земли, определяют текущее направление орбитальной угловой скорости и, соответственно, орбитальную систему координат (ОСК), описанную в Аппазов Р.Ф., Сытин О.Г. «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987, после чего прикладывают серию импульсов для разворота КО в требуемую ориентацию.
Основными недостатками этого способа управления движением являются требование обеспечения определенных светотеневых условий на орбите и продолжительное (7-10 минут) время, затрачиваемое на поиск Земли.
Техническим результатом изобретения является сокращение продолжительности построения ориентации после отделения от ДКО независимо от светотеневых условий на орбите.
Технический результат достигается тем, что в способе управления движением КО после отделения от ДКО, включающем выполнение серии импульсов для его разворота в требуемую ориентацию через время Δt, соответствующее моменту начала измерений угловой скорости КО, в отличие от прототипа предварительно определяют угол разворота КО из текущей ориентации в требуемую ориентацию по текущим угловым скоростям КО, значению Δt и по известному угловому положению ДКО в момент расстыковки, после чего прикладывают серию импульсов, величину которых определяют по разнице между текущей и требуемой ориентацией.
Технический результат в предлагаемом способе управления движением достигается тем, что для построения ориентации КО в качестве исходной информации используются номинальные параметры его отделения от РН. Максимальные ошибки фактической ориентации РН по сравнению с номинальной в момент разделения составляют 0.06% и ими можно пренебречь. Ввиду того что датчики угловых скоростей включаются с некоторой задержкой после разделения, информация об угловой скорости на момент разделения отсутствует. Однако после получения информации с датчиков угловых скоростей измеряется время Δt, прошедшее с момента разделения, и по измерениям текущей угловой скорости w и Δt определяется значения угловой скорости w0 на момент разделения. Далее, с помощью угловых скоростей w и w0 и известных данных об угловом положении РН на момент отделения ПКК определяют текущую ориентацию КО. После определения текущей ориентации производят разворот КО в требуемую ориентацию.
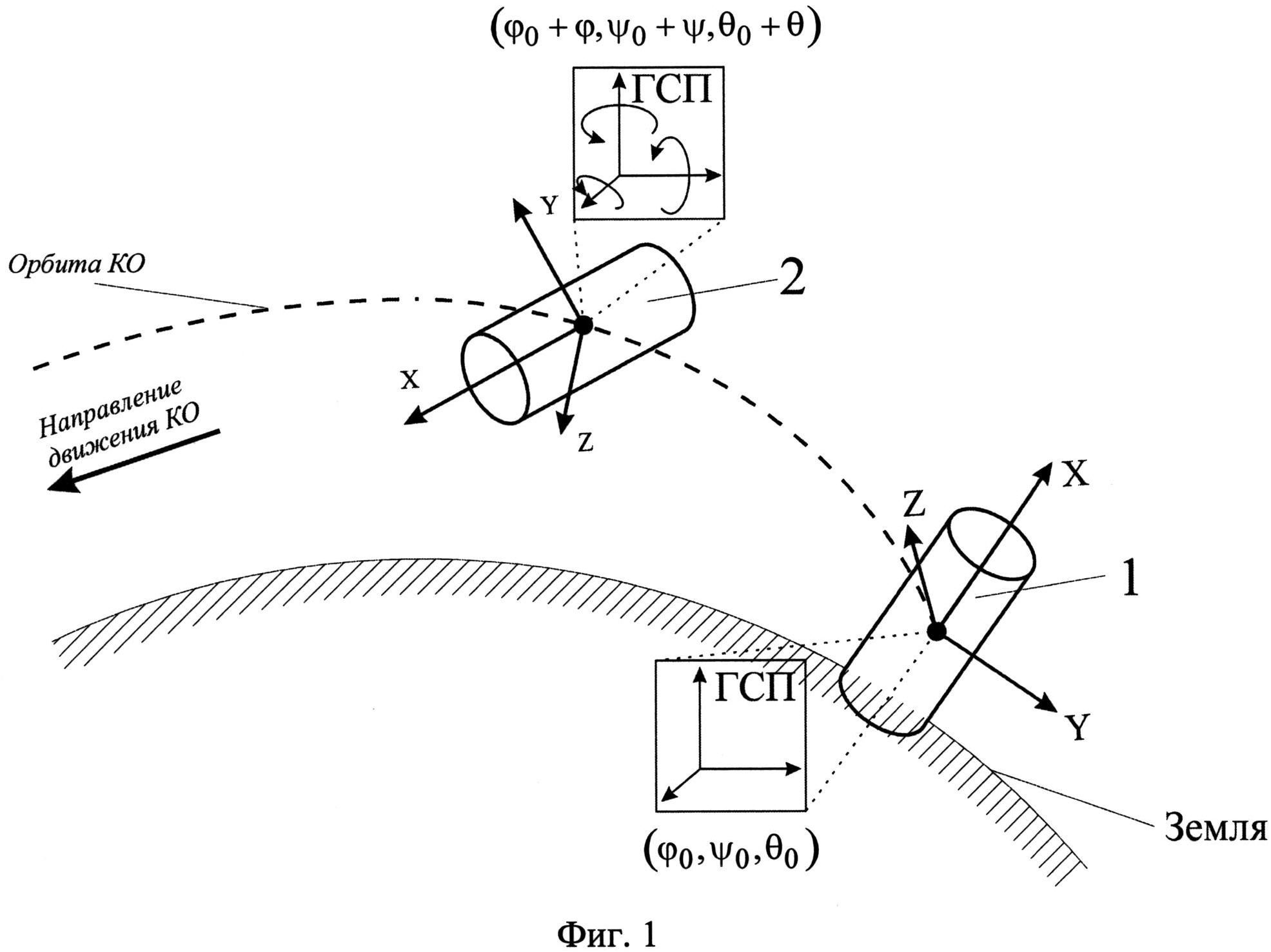
Сущность изобретения поясняется фиг. 1-6, где на фиг.1 представлен способ управления движением по показаниям ГСП,
на фиг. 2 представлен способ управления движением при помощи ИКВ,
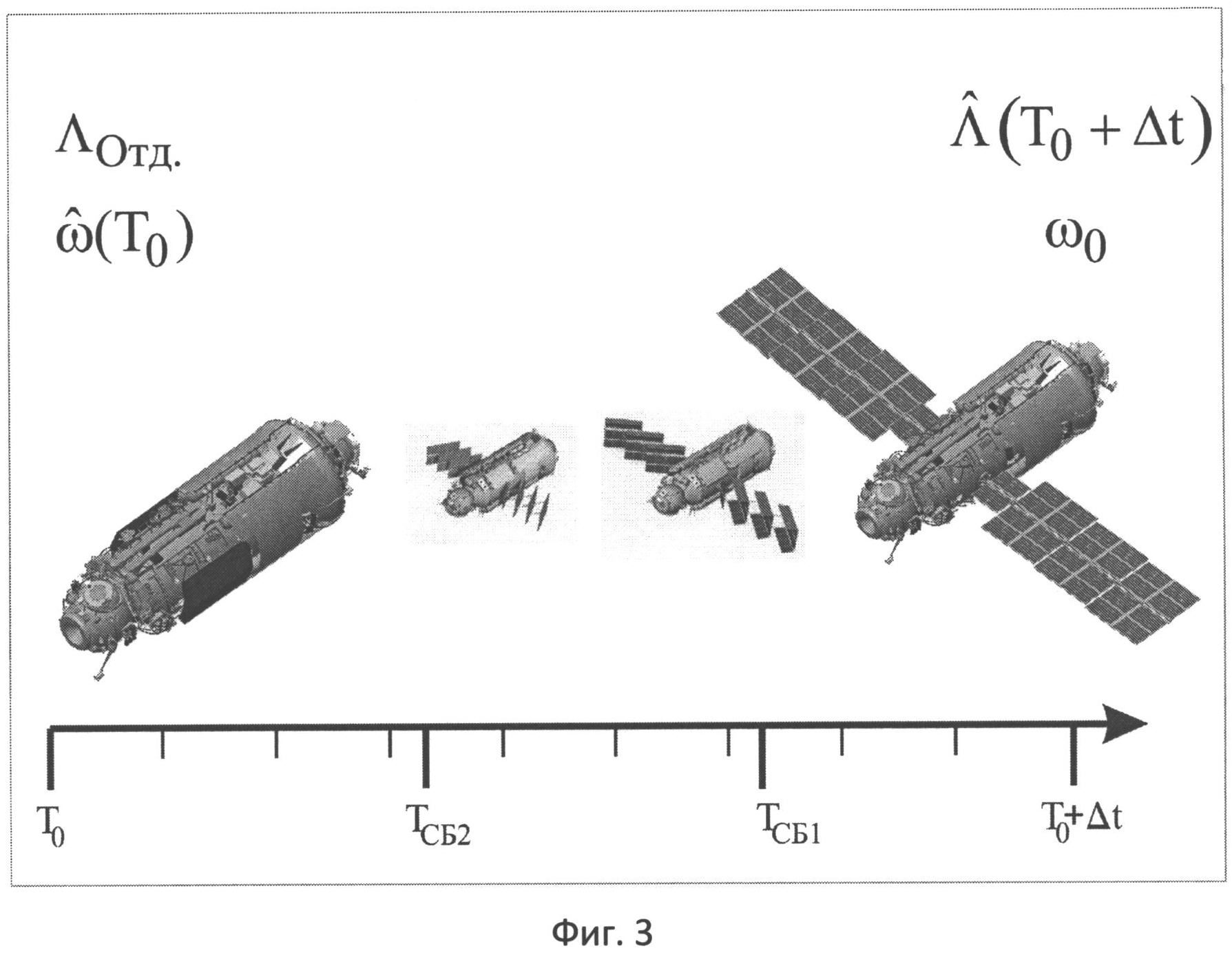
на фиг. 3 представлена циклограмма управления движением по предлагаемому способу,
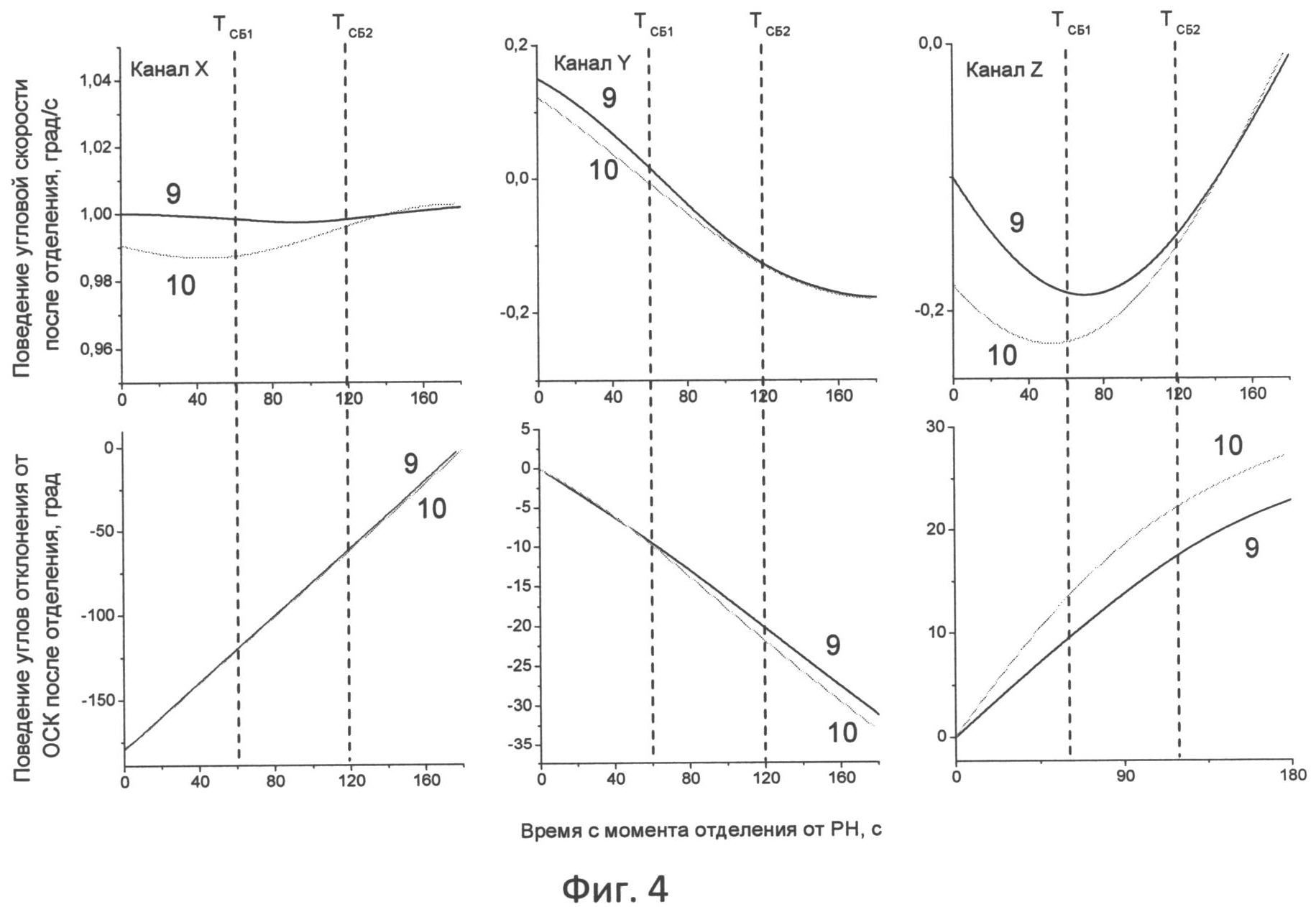
на фиг. 4 представлены графики изменения угловой скорости и углового рассогласования от времени при определении начального углового положения по предлагаемому способу,
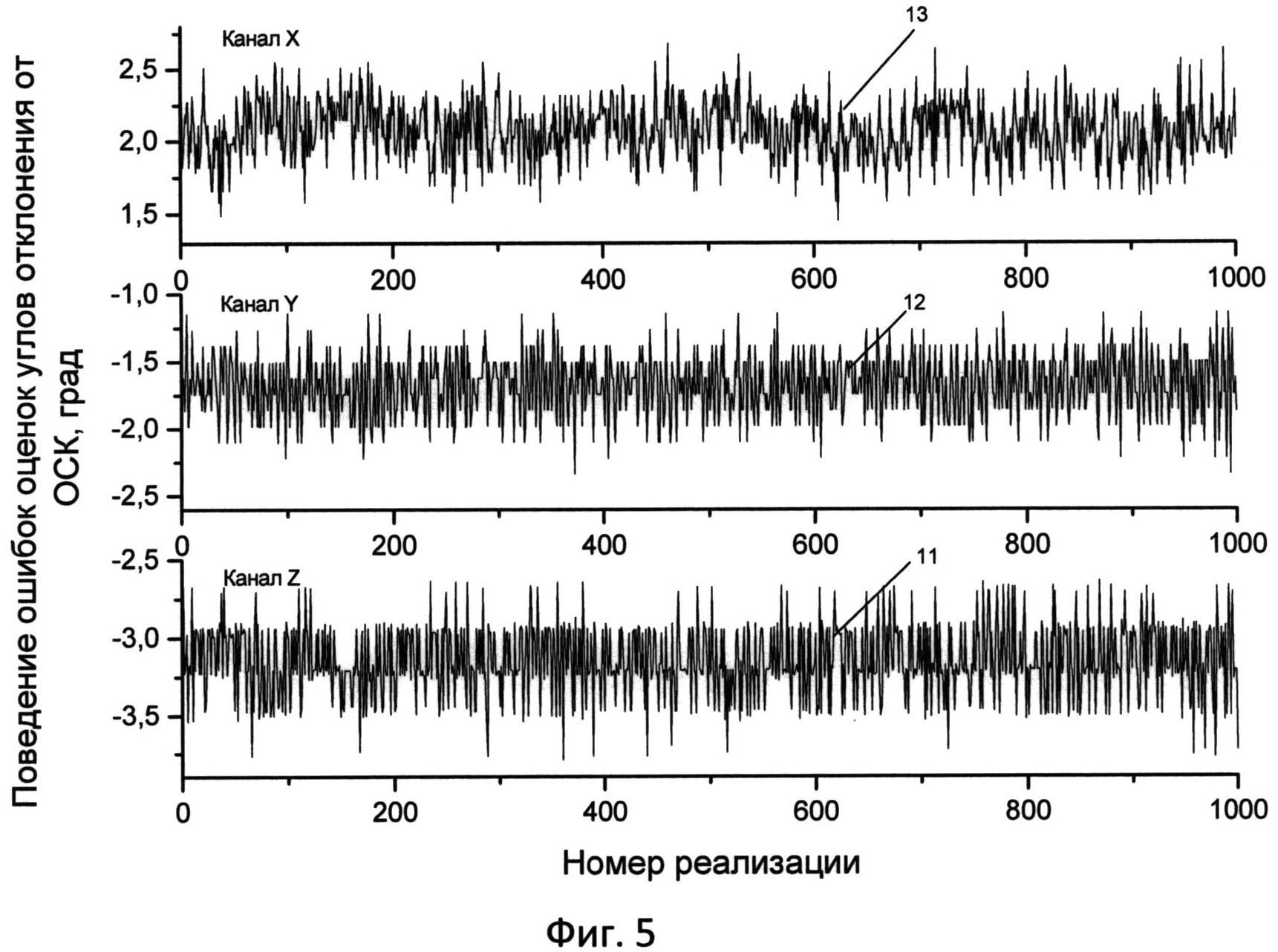
на фиг. 5 приведены графические результаты статистического моделирования определения начального углового рассогласования от ОСК для каждого канала измерений по предлагаемому способу,
на фиг. 6 приведены графические результаты статистического моделирования определения начального углового рассогласования от ОСК суммарно по всем каналам измерений.
Фиг. 1 представляет управление движением при построении ОСК с помощью ГСП, которая на старте имела определенное известное положение (поз. 1). Далее на основе информации о повороте ГСП (поз. 2) определяется кватернион разворота КО относительно его известной начальной ориентации где φ, ψ, θ - угловые рассогласования между текущим и начальным положением ГСП (φ0, ψ0, θ0) в каналах тангажа, рысканья и крена соответственно.
Фиг. 2 демонстрирует управление движением в процессе построения ОСК при помощи ИКВ. Вначале КО совершает ряд разворотов для обеспечения нахождения диска Земли в поле зрения датчика ИКВ (поз. 3). Затем по показаниям датчика ИКВ (поз. 4) строится местная вертикаль (поз. 5) за счет приведения с помощью двигателей КО видимого центра Земли в центр обзора датчика ИКВ (поз. 6). По изменению компонент угловой скорости в плоскости, перпендикулярной направлению на центр Земли, определяется текущее направление орбитальной угловой скорости, после чего осуществляется разворот КО вокруг местной вертикали (поз. 7) в ОСК (поз. 8).
На фиг. 3 представлена циклограмма управления движением по предлагаемому способу. После отделения от РН в момент Т0 КО находится в свободном, неуправляемом движении в течение времени Δt. За это время происходит подготовка двигательной установки, раскрытие элементов конструкции, включение и тестирование бортового оборудования, необходимого для осуществления автономного полета. В момент времени ТСБ1 начинается процесс раскрытия панелей солнечных батарей, который завершается в момент времени ТСБ2. В момент времени T0+Δt завершается раскрутка гироскопов датчиков угловой скорости и их измерения начинают поступать в бортовой компьютер.
На фиг. 4 представлены результаты моделирования процесса определения начальной ориентации. Фиг. 4 демонстрирует процесс восстановления угловой скорости и углов рассогласования от ОСК на всем интервале неуправляемого движения. Поз. 9 представляет изменение реальной угловой скорости и углового рассогласования, полученных из модели динамики углового движения, а поз. 10 представляет изменение их бортовых значений. Незначительное отличие реальной ориентации (поз. 9) от восстановленного значения (поз. 10) по предлагаемому способу появляется из-за дополнительного неучтенного влияния на угловое движение процесса раскрытия солнечных батарей, которое не вносит существенной ошибки при построении необходимой ориентации.
На фиг. 5 показаны точности определения начальной ориентации КО по каналу тангажа (поз. 11), рыскания (поз. 12) и крена (поз. 13).
На фиг. 6 представлено поведение суммарной ошибки оценки ориентации (поз. 14), полученной с использованием данных, представленных на фиг. 5.
Значение начальной ориентации определяется с использованием номинального знания ориентации ДКО в момент отделения КО. После включения датчиков системы управления движением КО через время Δt после отделения Т0 становятся доступны данные об угловой скорости КО. Основной сущностью изобретения является то, что используя модель динамики углового движения КО, описываемую в виде динамических уравнений Эйлера при их обратном интегрировании, можно оценить угловую скорость КО в момент отделения от РН. Далее, используя номинальные данные о начальной ориентации КО, совпадающей в момент отделения с известной ориентацией ДКО, с учетом определенного значения начальной угловой скорости, можно вычислить ориентацию КО на момент времени, соответствующий включению системы управления движением. Таким образом, задача сводится к решению граничной задачи для нелинейной системы дифференциальных уравнений седьмого порядка (1). Граничные условия этой задачи представляют собой известное угловое положение ДКО в кватернионной форме ΛОтд. в начальный момент времени на одной границе и вектор угловой скорости КО ω0 в конечный момент времени (2).


здесь J - матрица тензора инерции КО, ω - угловая скорость КО, Λ - кватернион ориентации КО.
Хотя возмущения от воздействия гравитационного и аэродинамического моментов, изменение моментов инерции КО, вызванное раскрытием солнечных батарей, а также точность знания начальной ориентации РН незначительно снизит точность определения начального углового положения, тем не менее полученной точности вполне достаточно для разворота КО в ОСК и датчик ИКВ будет направлен в сторону центра Земли без проведения серии последовательных разворотов КО для поиска диска Земли.
Задача (1)-(2) решается путем численного интегрирования методом Эйлера 1-го порядка с шагом τ=0.2 с. В процессе интегрирования используется матрица тензора инерции для аппарата с раскрытыми солнечными батареями. На небольшом начальном временном интервале измерения угловой скорости КО усредняются для снижения погрешности от шумов датчика угловой скорости. На следующем шаге уравнения Эйлера интегрируются в обратном времени по формуле:

После получения значения угловой скорости  на момент разделения, численным интегрированием дифференциальных уравнений (1) находится значение кватерниона рассогласования на текущий момент времени. Интегрирование (1) осуществляется методом Эйлера с коррекцией нормы кватерниона |Λn| по формулам (Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М.: Наука, 1992.):
на момент разделения, численным интегрированием дифференциальных уравнений (1) находится значение кватерниона рассогласования на текущий момент времени. Интегрирование (1) осуществляется методом Эйлера с коррекцией нормы кватерниона |Λn| по формулам (Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М.: Наука, 1992.):

После определения текущей ориентации КО прикладывают серию импульсов, величину которых определяют по разнице между текущей и требуемой ориентацией.
Результаты статистического моделирования, приведенные на фиг. 5, и фиг. 6 показывают, что средние значения ошибок определения ориентации по каналам X, Y, Z составляют соответственно 2°, -1.7°, -3.2°, а суммарная ошибка оценки углового рассогласования не превышает 5°.
Способ управления движением космического объекта после его расстыковки с другим космическим объектом, включающий выполнение серии импульсов для его разворота в требуемую ориентацию через время Δt, соответствующее моменту начала измерений угловой скорости космического объекта, отличающийся тем, что предварительно определяют угол разворота космического объекта из текущей ориентации в требуемую ориентацию по текущим угловым скоростям космического объекта, значению Δt и по известному угловому положению другого космического объекта в момент расстыковки, после чего прикладывают серию импульсов, величину которых определяют по разнице между текущей и требуемой ориентациями.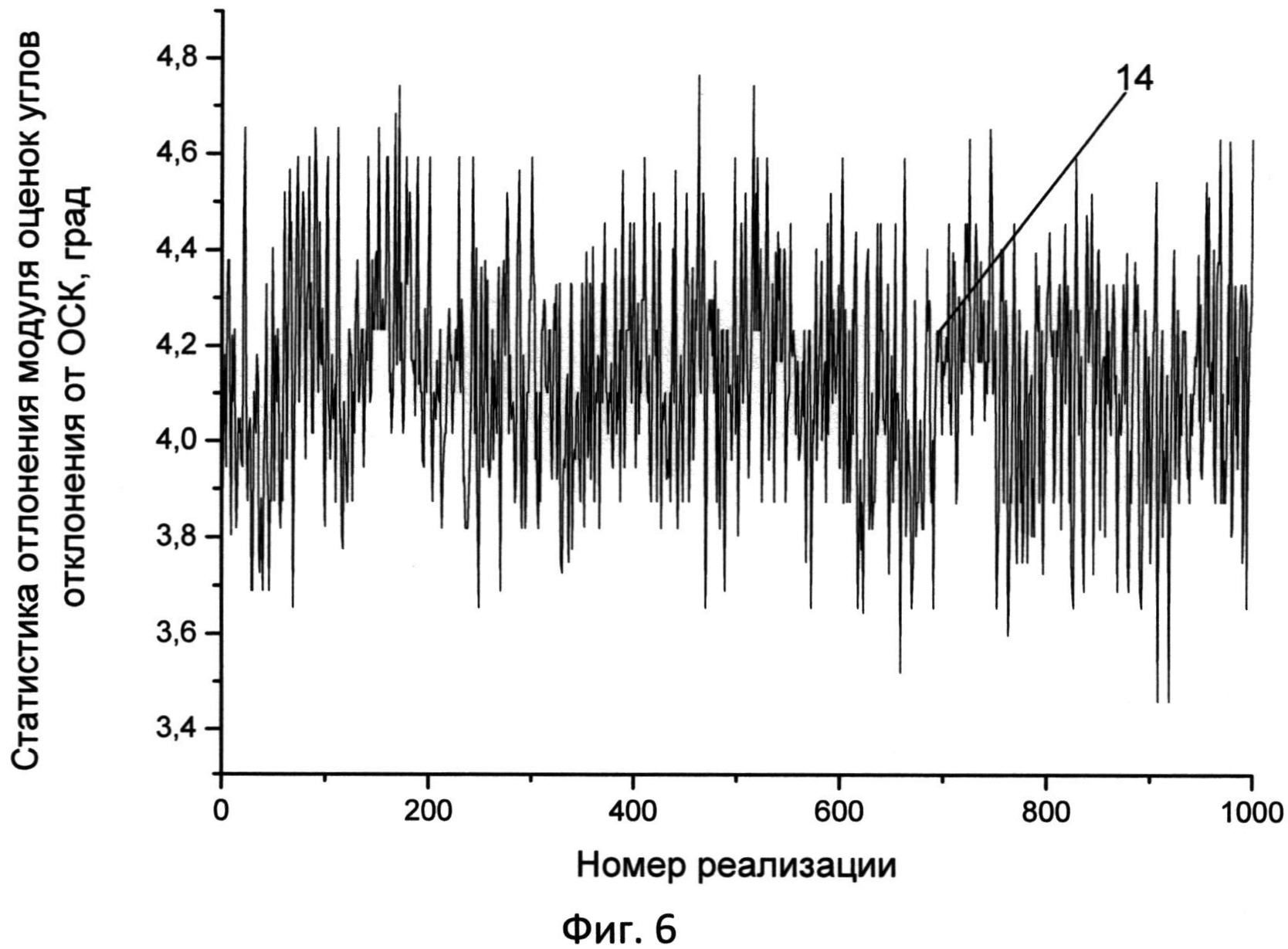
Быстроразъемный агрегат (варианты)
Центробежное рабочее колесо
Коммутатор напряжения с защитой от перегрузки по току
Способ получения электроэнергии из водорода с использованием топливных элементов и система энергопитания для его реализации
Коммутатор напряжения с защитой от перегрузки по току
Способ определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, система для его осуществления и устройство размещения излучателей на аппаратуре наблюдения
Двигатель с замкнутым дрейфом электронов
Электрохимический водяной насос
Бортовая электролизная установка космического аппарата
Термокомпрессионное устройство
Рабочее колесо осевого вентилятора (варианты)
Шаровой клапан
Разъемное соединение
Ионная двигательная установка космических аппаратов
Способ имитации внешних тепловых потоков для наземной отработки теплового режима космического аппарата
Посадочное устройство космического корабля
Быстроразъемный агрегат (варианты)
Центробежное рабочее колесо
Коммутатор напряжения с защитой от перегрузки по току
Способ получения электроэнергии из водорода с использованием топливных элементов и система энергопитания для его реализации

