Результат интеллектуальной деятельности: СПОСОБ ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано для определения местоположения воздушных судов (объектов) по их радиоизлучениям.
Для двухмерного пеленгования воздушных объектов по излучению бортовых УКВ передатчиков применяют инвариантные к направлению прихода сигнала кольцевые решетки, которые располагают параллельно и вблизи земной поверхности, на высоте 5-6 м от нее. По принятым сигналам определяют азимут и угол места объекта.
Известен фазовый способ радиопеленгования, включающий прием сигналов бортового передатчика воздушного объекта с помощью антенн, образующих кольцевую решетку, измерение фаз принятых сигналов, их реконструкцию с устранением цикличности фазовых измерений и расчет азимута и угла места по реконструированным фазам (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: «Радио и связь», 1997, с.10, 51-52)
Основным недостатком способа является низкая точность измерения угла места вблизи нулевого значения, так как погрешности измерения обратно пропорциональны его синусу. При интерференции прямой и отраженной от земной поверхности волны пеленгуется энергетический центр лучей со значительными флуктуациями. Другой недостаток состоит в сложности выполнения операции реконструкции фаз.
Известен способ пеленгования, включающий прием сигнала с помощью ненаправленных антенн, образующих кольцевую решетку, измерение разности фаз между сигналами в двух группах, векторы, соединяющие пары антенн в которых коллинеарны, а по совокупности разностей фаз в группах методом многошкальных измерений оценивают однозначные на расстоянии диаметра решетки набеги фаз, по которым рассчитывают азимут и угол места (Патент РФ №2251707, 2005 г., МПК7 G01S 3/00)
В данном способе исключается операция реконструкции фаз, но основной недостаток предыдущего аналога (низкая точность измерения угла места) не устраняется.
Из известных способов наиболее близким к предлагаемому по технической сущности является способ двухмерного пеленгования, включающий прием сигналов бортового передатчика воздушного объекта с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности, и определение по принятым сигналам азимута и угла места объекта. При этом измеряют комплексные амплитуды принятых сигналов с преобразованием в двухмерный угловой спектр, а азимут и угол места определяют как положение его максимума. Причем преобразование в двухмерный угловой спектр включает: умножение измеренных комплексных амплитуд на комплексно-сопряженные двухмерные диаграммы направленности, суммирование результатов умножения по совокупности антенн решетки и определение квадрата модуля суммы. Диаграммы направленности определяют применительно к условиям распространения радиоволн в свободном пространстве по формуле:  , где n=0, …, N-1 - номер антенны при общем количестве N≥3, θ, β - азимут и угол места, k=2·π/λ - волновое число, λ - длина волны излучения, ρ - радиус решетки, α=2π/N - квант углового положения ее антенн, π=3, 14 …, i - мнимая единица (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: «Радио и связь», 1997, с. 47-48).
, где n=0, …, N-1 - номер антенны при общем количестве N≥3, θ, β - азимут и угол места, k=2·π/λ - волновое число, λ - длина волны излучения, ρ - радиус решетки, α=2π/N - квант углового положения ее антенн, π=3, 14 …, i - мнимая единица (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. М.: «Радио и связь», 1997, с. 47-48).
В данном способе достигается потенциальная точность и предельная чувствительность измерения азимута, но сохраняется основной недостаток способов-аналогов: низкая точность измерения угла места, особенно вблизи его нулевого значения. Определенную сложность вызывает выполнение операции двухмерного преобразования сигналов в угловой спектр.
Технической задачей данного изобретения является повышение точности измерения угла места.
Поставленная задача решается за счет того, что в известном способе пеленгования воздушного объекта, включающем прием сигналов бортового передатчика с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности, определение по принятым антеннами решетки сигналам азимута объекта, измерение комплексных амплитуд принятых сигналов и преобразование измерений в угловой спектр путем умножения на комплексно-сопряженные диаграммы направленности антенн, суммирования результатов умножения по совокупности антенн и определения квадрата модуля суммы, новым является то, что сигналы принимают одновременно с помощью дополнительных антенн, располагаемых на нормали к плоскости решетки из ее центра, угловой спектр нормируют на сумму квадратов модулей диаграмм направленности антенн и определяют угол места объекта, как положение максимума нормированного углового спектра, при этом диаграммы направленности антенн определяют в направлении полученного азимута и с учетом отражения радиоволн от земной поверхности по формуле:  , где
, где  - полученный азимут объекта, β - угол места,
- полученный азимут объекта, β - угол места,  ,
,  - диаграммы направленности в направлении прямого и отраженного луча антенн кольцевой решетки с номерами n=0, …, N-1 при числе антенн в ней N,
- диаграммы направленности в направлении прямого и отраженного луча антенн кольцевой решетки с номерами n=0, …, N-1 при числе антенн в ней N,  ,
,  - диаграммы направленности в направлении прямого и отраженного луча дополнительных антенн с номерами n=N, …, N′-1 при общем числе антенн N′,
- диаграммы направленности в направлении прямого и отраженного луча дополнительных антенн с номерами n=N, …, N′-1 при общем числе антенн N′,  - коэффициент отражения от земной поверхности, k=2·π/λ - волновое число, λ - длина волны излучения, h - высота поднятия решетки над земной поверхностью, ρ - радиус решетки, Δhn - высота поднятия над ней дополнительных антенн, π-=3,14 …, i - мнимая единица.
- коэффициент отражения от земной поверхности, k=2·π/λ - волновое число, λ - длина волны излучения, h - высота поднятия решетки над земной поверхностью, ρ - радиус решетки, Δhn - высота поднятия над ней дополнительных антенн, π-=3,14 …, i - мнимая единица.
Решение поставленной технической задачи основывается на учете в диаграммах направленности антенн как прямого, так и отраженного от земной поверхности луча, различий набегов фаз сигналов в антеннах решетки и поднятых над ней антеннах, пропорциональных соответственно косинусу и синуса угла места прихода радиоволн. При определении углового спектра компенсируют набеги фаз совокупности прямой и отраженной волны, что позволяет выполнять когерентное суммирование по совокупности антенн, а возникающие вследствие сложения лучей направленные свойства по углу места учитывают нормировкой на сумму квадратов модулей диаграмм направленности. Тем самым достигается формирование максимума нормированного углового спектра в точке истинного угла места объекта со снижением погрешности его измерения. Существенным является также осевая симметрия антенной системы. Это позволяет определять азимут одним из известных способом по сигналам кольцевой решетки, а угол места путем однопараметрической максимизации нормированного углового спектра в направлении измеренного азимута. Последним исключается процедура определения и максимизации двухмерного углового спектра способа-прототипа с сокращением числа выполняемых операций по обработке сигналов.
Учет указанных закономерностей в соответствии с предложенными новыми действиями, условиями и порядком их выполнения позволяет решить поставленную техническую задачу: повысить точность измерения угла места.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые чертежи.
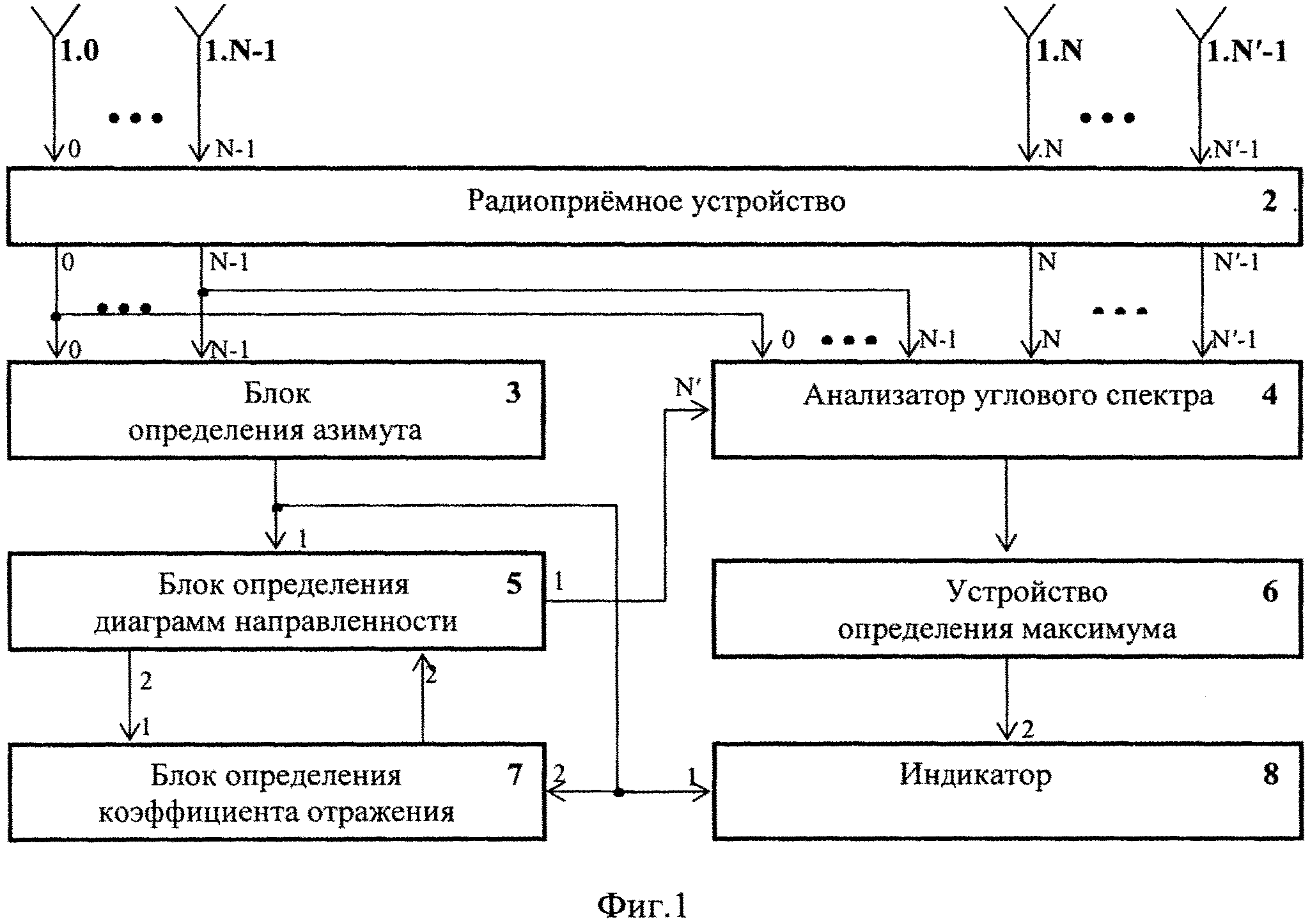
На фиг. 1 представлена структурная схема радиопеленгатора для реализации заявленного способа;
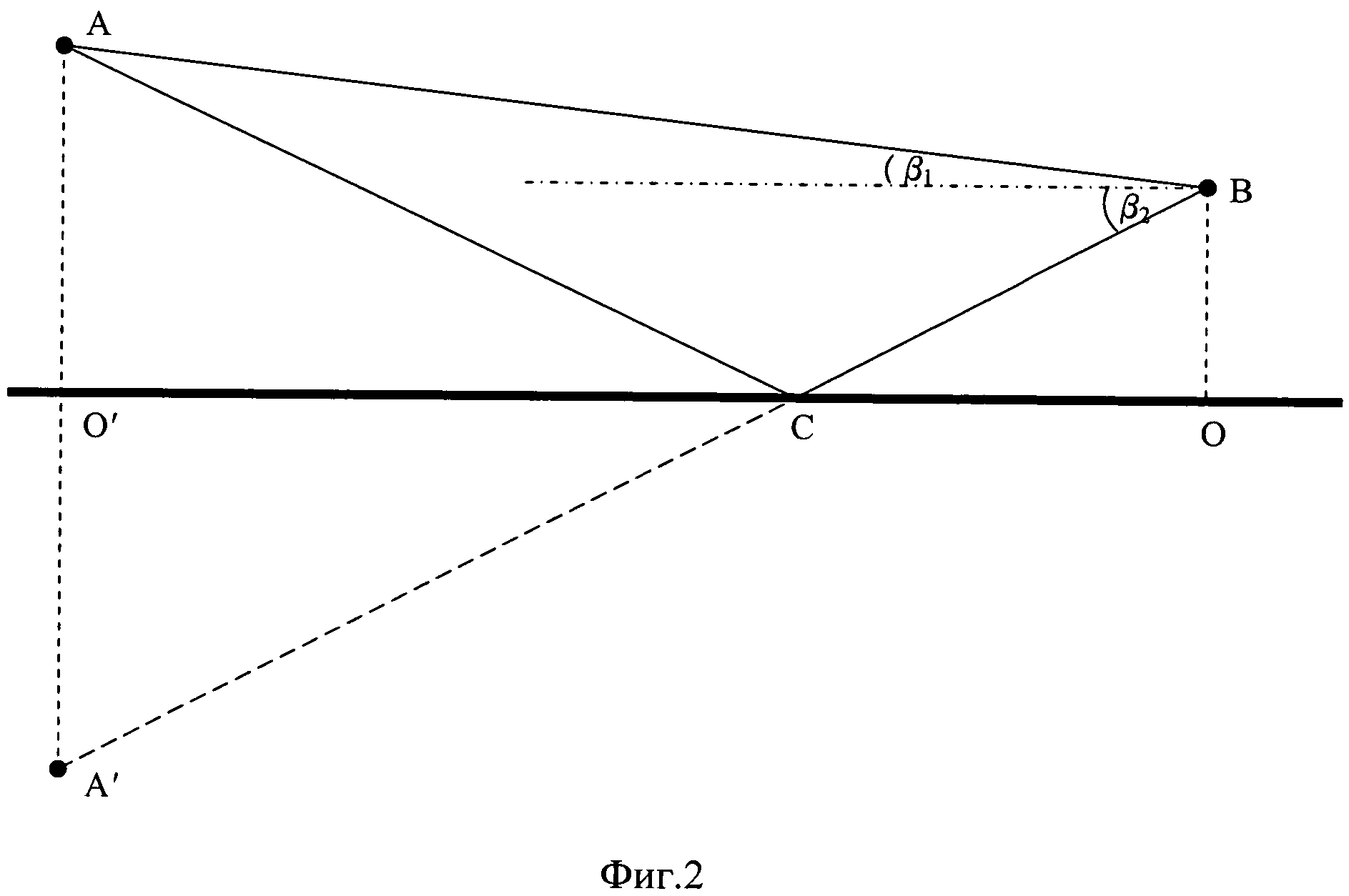
на фиг. 2 показана схема распространения радиоволн;
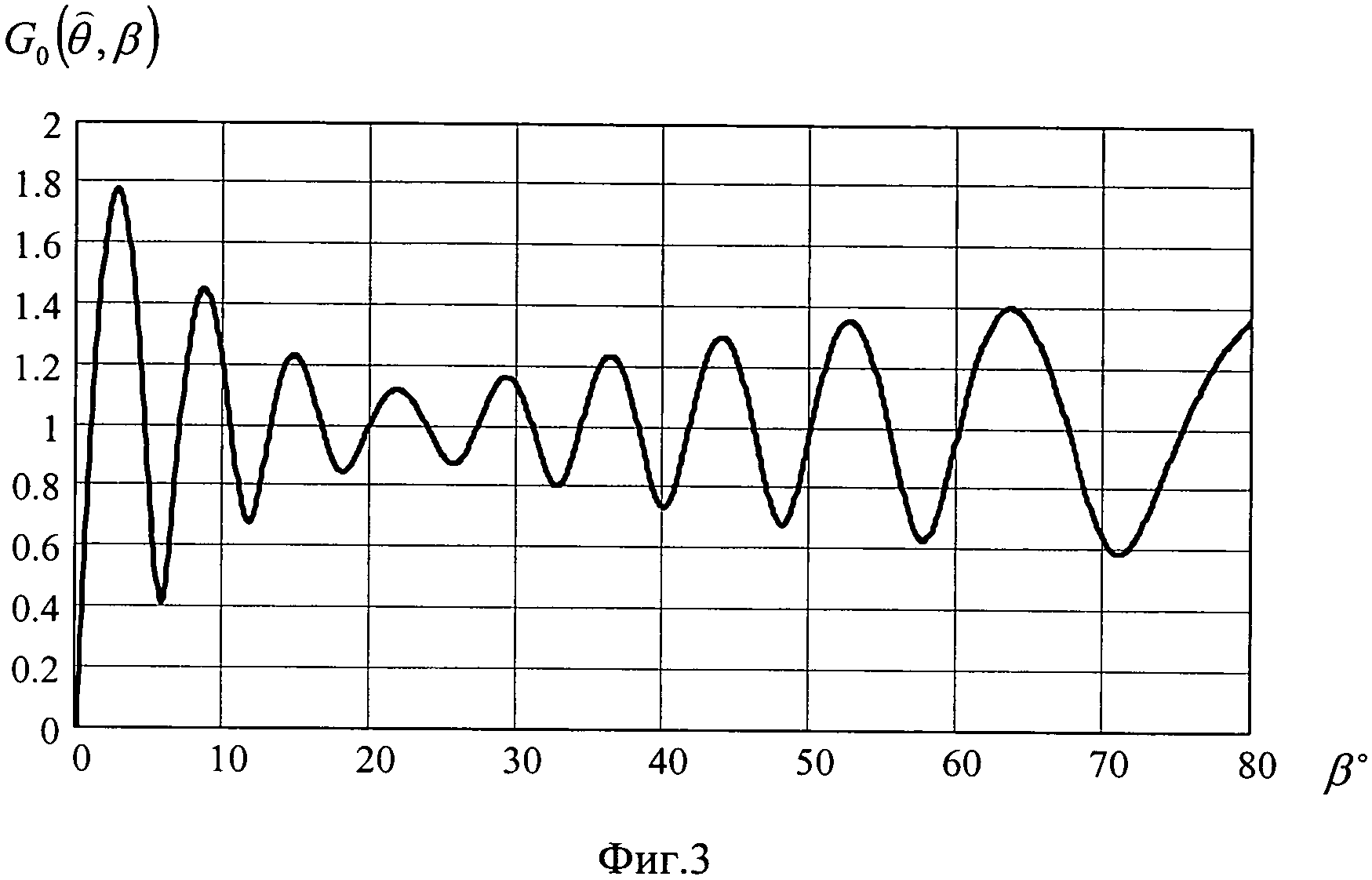
на фиг. 3 - диаграмма направленности антенны с учетом отражения радиоволн от земной поверхности;
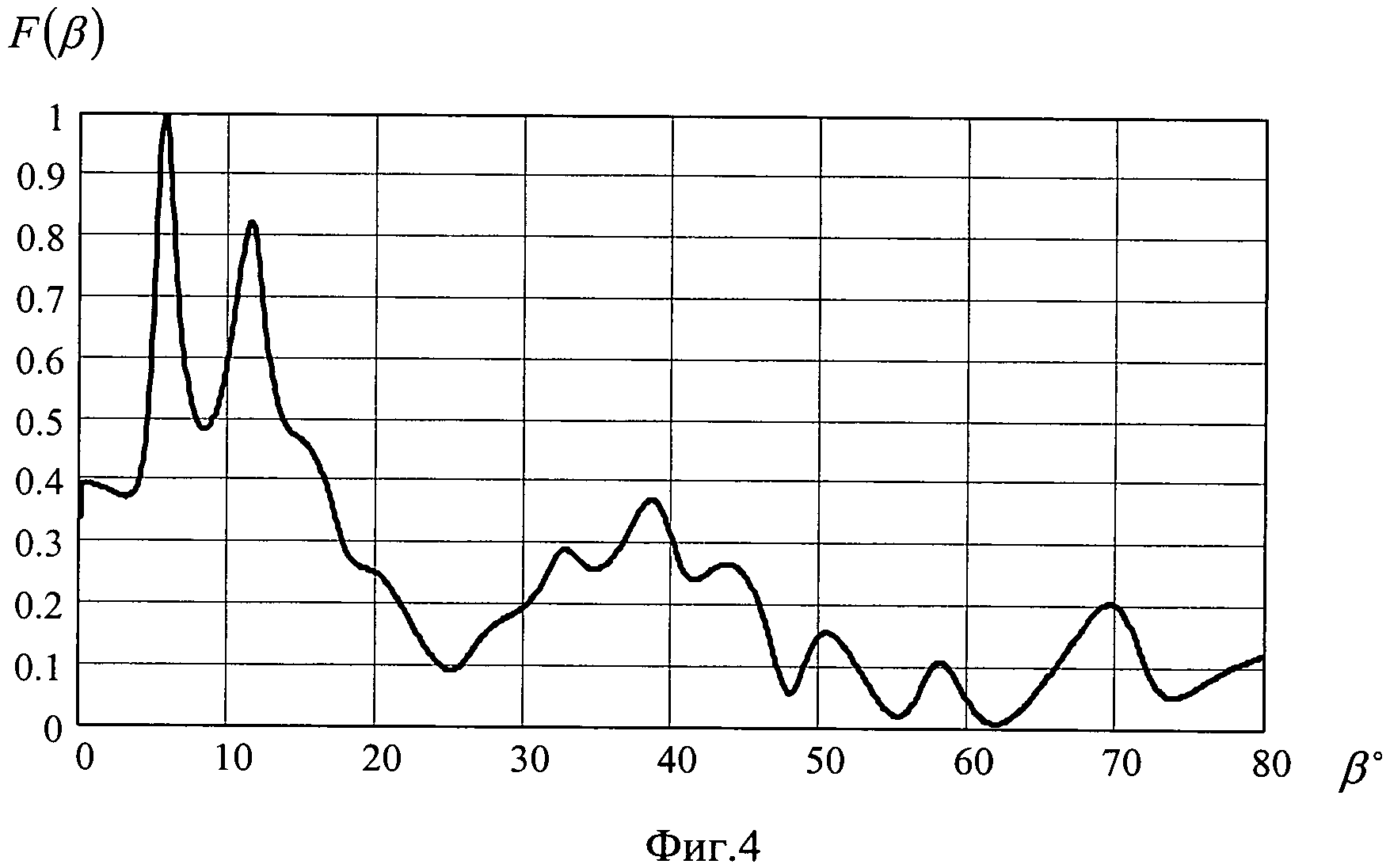
на фиг. 4 - нормированный угловой спектр;
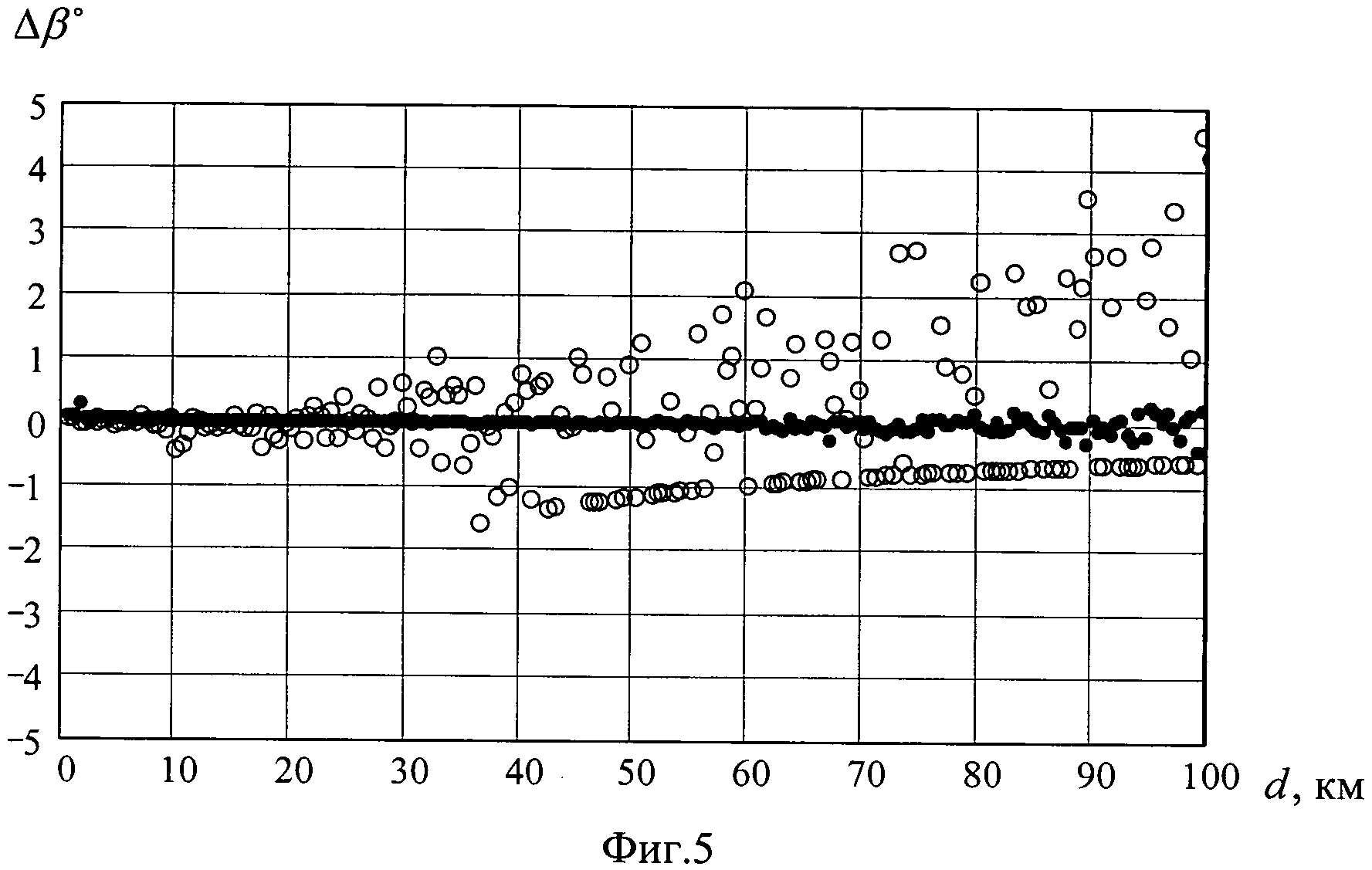
на фиг. 5 - зависимости погрешности измерения угла места от дальности до объекта;
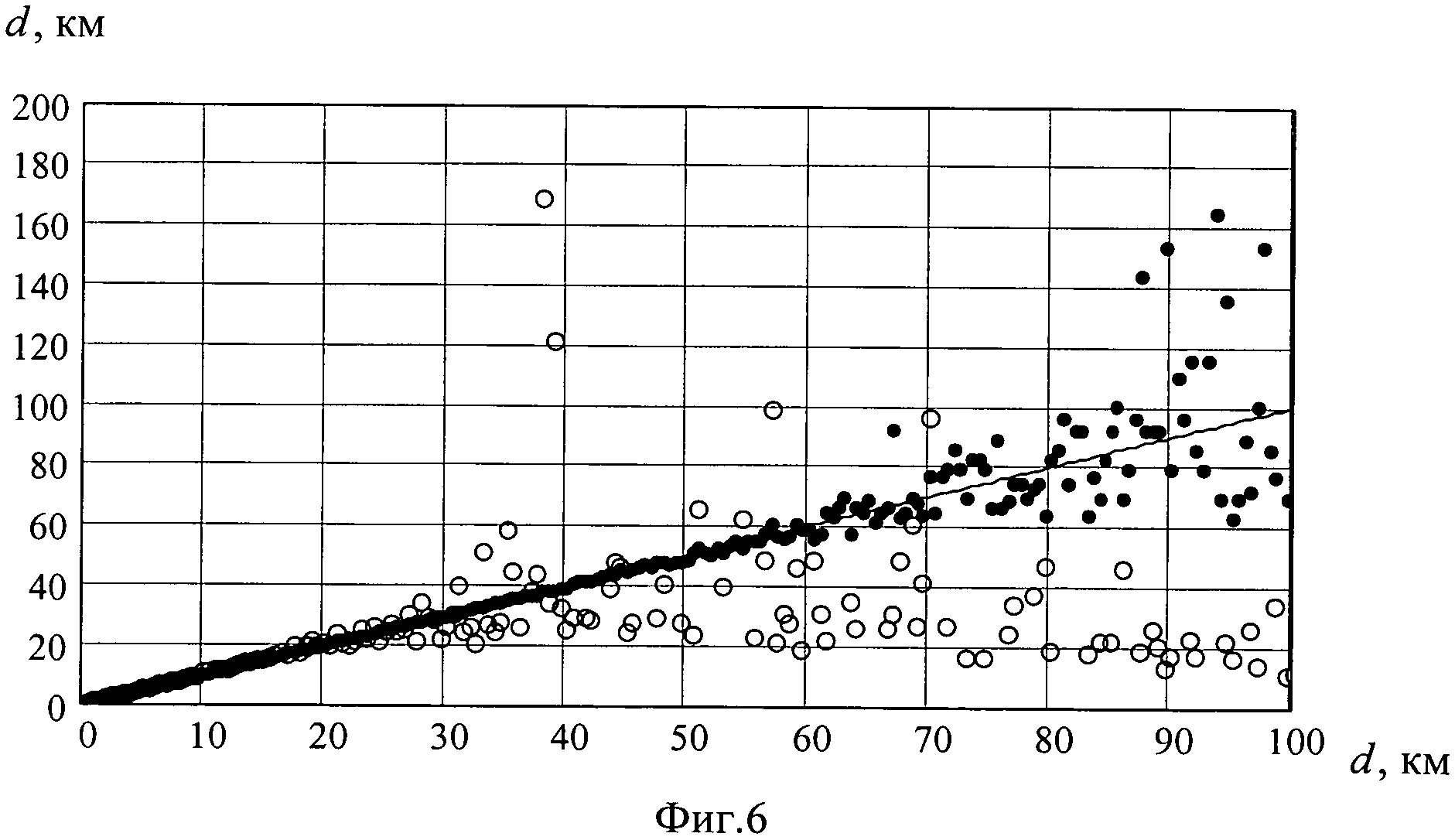
на фиг. 6 - зависимости погрешности определения дальности от ее истинного значения.
Радиопеленгатор для реализации заявленного способа (фиг. 1) содержит антенны 1.0-1.N′-1 подключенные к входам 0-N′-1 радиоприемного устройства 2, выходами 0-N-1 соединенного с одноименными входами блока 3 определения азимута и анализатора углового спектра 4, входы N-N′-1 которого подключены к одноименным выходам радиоприемного устройства 2, а вход N′ - к первому выходу блока 5 определения диаграмм направленности, устройство определения максимума 6, блок определения коэффициента отражения 7 и индикатор 8. Выход блока определения азимута 3 подключен к первым входам блока определения диаграмм направленности 5 и индикатора 8 и второму входу блока определения коэффициента отражения 7, соединенного с первым входом со вторым выходом блока определения диаграмм направленности 5, а выходом - со вторым входом этого блока. Анализатор углового спектра 4, устройство определения максимума 6 последовательно подключены ко второму входу индикатора 8.
Радиоприемное устройство 2 многоканальное с числом каналов, равным общему числу антенн N′, выполняет фильтрацию и синхронное преобразование принятых сигналов с цифровым измерением и представлением в виде комплексных амплитуд (квадратурных составляющих), например, по варианту, приведенному в (Побережский К.С. Цифровые радиоприемные устройства. М., Радио и связь, 1987, с. 67-68, рис. 3.140)
Антенны 1.0-1.N-1 образуют кольцевую эквидистантную решетку с числом антенн N≥3. Радиус решетки ρ устанавливают из условия не превышения расстояния между ближайшими антеннами половины длины волны излучения. Решетку ориентируют опорной 1.0 антенной на Север. Фазовые центры антенн решетки располагают в одной горизонтальной плоскости на высоте h над земной поверхностью, порядка 5-6 м. Дополнительные антенны 1.N-1.N′-1 устанавливают на нормали к плоскости решетки из ее центра, например, с постоянным шагом δh. Тогда высота поднятия дополнительных антенн над плоскостью решетки будет Δhn=δh·(n+1-N), где n=N, …, N′-1 - номер дополнительной антенны, N′ - общее число антенн. А высота поднятия антенн решетки с номерами n=0, …, N-1 и дополнительных антенн с номерами n=N, …, N′-1 над Землей определяются соотношениями: hn-h при n=0, …, N-1 и hn=h+Δhn при n=N, …, N′-1.
В соответствии со схемой распространения радиоволн (фиг. 2) в пункт пеленгования В от бортового передатчика А приходит прямая волна по пути АВ и отраженная от земной поверхности по пути АСВ или эквивалентному ему А′СВ. На рисунке толстой линией показана земная поверхность, точка А′ - фиктивный излучатель под поверхностью, С - точка отражения, β1=β, β2=-β - углы места прихода прямой и отраженной волны. Высота h подъема плоскости решетки над земной поверхностью определяется отрезком ВО. Обозначим: d - удаление излучателя от пеленгатора по земной поверхности (отрезок OO′),  - наклонная дальность, Н - высота АО′ подъема излучателя над Землей. Отсчет положительных значений углов места β выполняют от линии, параллельной земной поверхности, к зениту, азимута θ - от направления на опорную антенну с номером n=0 по часовой стрелке.
- наклонная дальность, Н - высота АО′ подъема излучателя над Землей. Отсчет положительных значений углов места β выполняют от линии, параллельной земной поверхности, к зениту, азимута θ - от направления на опорную антенну с номером n=0 по часовой стрелке.
В соответствии с методом зеркального изображения (Грудинская Г.П. Распространение радиоволн. М., «Высш. школа», 1975, с.45-47) и геометрическими построениями (фиг. 2) мгновенные значения напряженности поля, принимаемого антеннами, определяются соотношением

где  - комплексная амплитуда напряженности поля прямого луча в центре антенной решетки, Р - мощность излучения, k=2π/λ - волновое число, λ - длина волны излучения.
- комплексная амплитуда напряженности поля прямого луча в центре антенной решетки, Р - мощность излучения, k=2π/λ - волновое число, λ - длина волны излучения.
Комплексные диаграммы направленности антенн определяют с учетом отражения радиоволн от земной поверхности по формуле

где  и
и  - диаграммы направленности в направлении прямого и отраженного луча антенн кольцевой решетки (n=0, …, N-1),
- диаграммы направленности в направлении прямого и отраженного луча антенн кольцевой решетки (n=0, …, N-1),  и
и  - диаграммы направленности в направлении прямого и отраженного луча дополнительных антенн (n=N, …, N′-1), α=2π/N - квант углового положения антенн решетки, звездочка - операция комплексного сопряжения.
- диаграммы направленности в направлении прямого и отраженного луча дополнительных антенн (n=N, …, N′-1), α=2π/N - квант углового положения антенн решетки, звездочка - операция комплексного сопряжения.
Удаление точки отражения С (фиг. 2) от пеленгатора не превышает дальности прямой видимости и при высоте поднятия решетки h=5 …6 м составляет величину  . Коэффициент отражения определяется электрическими параметрами земной поверхности в точке (области) отражения, координаты которой зависят от азимута и угла места объекта. Для определения коэффициента отражения может выполняться (Грудинская Г.П. Распространение радиоволн. М., «Высш. школа», 1975, с. 39, 66, 49-50, 34, 25) специальное зондирование, предваряющее эксплуатацию пеленгатора, с регистрацией значений коэффициента отражения в блоке 7 фиг. 1 в виде таблицы, как функции азимута и угла места
. Коэффициент отражения определяется электрическими параметрами земной поверхности в точке (области) отражения, координаты которой зависят от азимута и угла места объекта. Для определения коэффициента отражения может выполняться (Грудинская Г.П. Распространение радиоволн. М., «Высш. школа», 1975, с. 39, 66, 49-50, 34, 25) специальное зондирование, предваряющее эксплуатацию пеленгатора, с регистрацией значений коэффициента отражения в блоке 7 фиг. 1 в виде таблицы, как функции азимута и угла места  , или привлекаться картографическая информация и справочные данные об электрических параметрах различных видов земной поверхности с расчетом по формуле
, или привлекаться картографическая информация и справочные данные об электрических параметрах различных видов земной поверхности с расчетом по формуле

где  , ε(θ, β), γ(θ, β) - относительная диэлектрическая проницаемость и удельная проводимость земной поверхности в точке отражения.
, ε(θ, β), γ(θ, β) - относительная диэлектрическая проницаемость и удельная проводимость земной поверхности в точке отражения.
Для однородной в окрестности пеленгатора земной поверхности зависимость от азимута в формуле (3) исключается. Для волн УКВ-сантиметрового диапазона земная поверхность по своим свойствам близка к диэлектрику и возможно упрощенное определение коэффициента отражения в виде постоянной величины  .
.
Непосредственно пеленгование воздушного объекта происходит следующим образом. Излучение бортового передатчика принимают антеннами 1.0-1.N′-1 и в радиоприемном устройстве 2 измеряют их комплексные амплитуды  , где
, где  - шумы приема. В блоке определения азимута 3 по результатам измерений комплексной амплитуды сигналов решетки, поступающим по входам 0-N-1 с одноименных выходов радиоприемного устройства, оценивают разности фаз между сигналами ближайших антенн решетки по формуле:
- шумы приема. В блоке определения азимута 3 по результатам измерений комплексной амплитуды сигналов решетки, поступающим по входам 0-N-1 с одноименных выходов радиоприемного устройства, оценивают разности фаз между сигналами ближайших антенн решетки по формуле:  , где
, где  - аргумент комплексного числа заключенного в скобки (фаза вектора), ⊕ - операция сложения по модулю N, и рассчитывают азимут объекта
- аргумент комплексного числа заключенного в скобки (фаза вектора), ⊕ - операция сложения по модулю N, и рассчитывают азимут объекта

Для расчетного азимута (4), поступающего с выхода блока определения азимута 3 на второй вход, и возможного положения объекта по углу места, поступающего со второго выхода блока определения диаграмм направленности 5 на первый вход, в блоке 7 определения коэффициента отражения рассчитывают значение коэффициента по формуле (3). После чего в блоке 5 определения диаграмм направленности рассчитывают по формуле (2) комплексные диаграммы направленности антенн  в направлении измеренного азимута, поступающего с выхода блока 3 по первому входу, и для поступающего по второму входу с выхода блока 7 расчетного коэффициента отражения в направлении возможного угла места. Типичная амплитудная диаграмма направленности показана на фиг. 3. Видны значительные ее изменения от угла места, что является следствием интерференции прямой и отраженной волны.
в направлении измеренного азимута, поступающего с выхода блока 3 по первому входу, и для поступающего по второму входу с выхода блока 7 расчетного коэффициента отражения в направлении возможного угла места. Типичная амплитудная диаграмма направленности показана на фиг. 3. Видны значительные ее изменения от угла места, что является следствием интерференции прямой и отраженной волны.
В анализаторе углового спектра 4 по измеренным комплексным амплитудам всех принятых сигналов, поступающим по входам 0-N′-1 и значениям диаграмм направленности по входу N′ с первого выхода блока 5, определяют нормированный угловой спектр как функцию угла места
В соответствии с формулой (5) при этом умножают измеренные комплексные амплитуды  на комплексно-сопряженные диаграммы направленности антенн в направлении полученного азимута объекта и возможных углов места, суммируют результаты умножения по совокупности всех антенн, определяют квадрат модуля суммы. В результате умножения происходит компенсация набегов фаз сигналов прямой и отраженной волны, а суммированием по совокупности антенн достигается когерентное накопление принятых сигналов. Возникающие вследствие сложения лучей направленные свойства антенн по углу места фиг. 3 учитывают нормировкой на сумму квадратов модулей диаграмм направленности. Пример нормированного углового спектра показан на фиг. 4. Этот спектр имеет максимум в окрестности истинного угла места объекта.
на комплексно-сопряженные диаграммы направленности антенн в направлении полученного азимута объекта и возможных углов места, суммируют результаты умножения по совокупности всех антенн, определяют квадрат модуля суммы. В результате умножения происходит компенсация набегов фаз сигналов прямой и отраженной волны, а суммированием по совокупности антенн достигается когерентное накопление принятых сигналов. Возникающие вследствие сложения лучей направленные свойства антенн по углу места фиг. 3 учитывают нормировкой на сумму квадратов модулей диаграмм направленности. Пример нормированного углового спектра показан на фиг. 4. Этот спектр имеет максимум в окрестности истинного угла места объекта.
В устройстве определения максимума 6 определяют угол места объекта как положение максимума нормированного углового спектра. Результаты определения пеленга (вход 1 индикатора 8) и угла места (вход 2) отражают на индикаторе 8.
Эффективность изобретения выражается в повышении точности измерения угла места. Количественная оценка выполнена методом имитационного моделирования для следующих условий.
Исследовался радиопеленгатор, размещенный на ледяной поверхности с относительной диэлектрической проницаемостью, равной 5, и удельной проводимостью 0,05 Ом/м, и содержащий 8-элементную антенную решетку радиусом 0,5 м, поднятую на мачте высотой 5 м, и две дополнительные антенны, установленные над решеткой на высоте 1 и 2 м. Задана предельная чувствительность пеленгования 2 мкВ/м. Высота воздушного объекта 1000 м, мощность передатчика 10 Вт, длина волны излучения 1 м. Расчет коэффициента отражения выполнялся по формуле (3). Моделирующая программа разработана в системе Mathcad, имеется у авторов и патентообладателя.
Результаты показаны на фиг. 5 в виде зависимости погрешности измерения угла места Δβ от дальности d до объекта для способа-прототипа кружками, для предлагаемого решения - точками. Видно, что погрешности измерений в предлагаемом способе примерно на порядок меньше. Более наглядно эффект от предлагаемого изобретения показан на фиг. 6 в виде зависимости оценочной дальности от ее истинного значения. Оценочная дальность определяется по измеренному углу места  при известной высоте объекта Н по формуле:
при известной высоте объекта Н по формуле:  . В соответствии с фиг. 6 за счет увеличения точности измерения угла места область надежного определения дальности в предлагаемом способе увеличивается с 30 км (прототип) до 70-80 км, что упрощает, делает более надежным и безопасным привод воздушного судна на необорудованные аэродромы, буровые площадки.
. В соответствии с фиг. 6 за счет увеличения точности измерения угла места область надежного определения дальности в предлагаемом способе увеличивается с 30 км (прототип) до 70-80 км, что упрощает, делает более надежным и безопасным привод воздушного судна на необорудованные аэродромы, буровые площадки.





Способ переработки мицелиальных отходов производства гентамицина сульфата
Гибкий защитный слой для подвижных и деформирующихся элементов конструкций
Доплеровский измеритель скорости космического аппарата
Колейный разборный мост для пропуска нагрузок легкой категории по массе
Способ наземной эксплуатации аккумуляторных батарей системы электропитания космического аппарата
Тренажер для обучения механика-водителя гусеничной машины
Устройство термостатирования бортовой аппаратуры полезного груза в составе космической головной части
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата
Устройство преобразования углового перемещения антенны рлс
Свч-фильтр нижних частот
Способ самонаведения на наземную цель
Способ радиосвязи с пространственным разделением каналов

