Результат интеллектуальной деятельности: БЛОК СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
Вид РИД
Изобретение
Изобретение относится к системам регулирования температуры и может быть использовано в инерциальных микромеханических навигационных системах на основе датчиков ускорения и угловой скорости.
Известен способ термостатирования гироскопа в проточном термостате. Система термостатирования, функционирующая по данному принципу (патент RU № 2282146 С1, МПК G01C 19/00, G05D 23/00, опубл. 20.08.2006. Бюл. № 23), принята за прототип. Изобретение относится к системам регулирования температуры и может быть использовано в гироскопическом приборостроении для повышения точности термостабилизации чувствительных элементов. Сущность изобретения: непрерывно подогревают термодатчик системы термостатирования теплоносителя постоянной мощностью, определяемой при настройке из условия, чтобы температура термодатчика изменялась при изменении расхода на такую же величину, что и температура чувствительного элемента. Ввиду подогрева температура термодатчика становится зависимой от интенсивности обдува, что позволяет системе термостабилизации за счет изменения температуры теплоносителя поддерживать температуру гироскопического чувствительного элемента постоянной при изменении расхода.
Система состоит из гироскопа, установленного в карданов подвес и выделяющего тепловую мощность, внутреннего кольца карданова подвеса с металлическими экранами, наружного кольца карданова подвеса с металлическими экранами, электроветилятора, электронагревателя системы термостабилизации теплоносителя, термодатчика системы термостабилизации с введенным в него постоянным подогревом, автоматического регулятора температуры.
Недостатками прототипа являются:
- недостаточная точность стабилизации температуры;
- необходимость проведения большого объема регулировочных работ и натурных испытаний;
- наличие достаточно высокого уровня конденсации влаги;
- неэффективная система управления системой термостабилизации;
- отсутствие возможности прямого отвода тепла или прямого обогрева прибора.
Предлагаемым изобретением решается задача по точности работы инерциальной навигационной системы в реальных условиях эксплуатации.
Технический результат, получаемый при осуществлении изобретения, заключается в создании блока стабилизации температуры инерциальной навигационной системы, устанавливаемого на самодвижущейся платформе робототехнического комплекса и обладающего высокой степенью стабильности поддержания температуры окружающей среды в рабочей зоне, что позволяет поддерживать высокую точность навигационных определений.
Указанный технический результат достигается тем, что в предлагаемом блоке стабилизации температуры инерциальной навигационной системы, содержащем объект стабилизации температуры, электровентилятор, электронагреватель блока стабилизации температуры теплоносителя, датчик температуры, автоматический регулятор температуры, новым является то, что объект стабилизации температуры - микромеханическая инерциальная навигационная система, выполненная на основе MEMS-датчиков ускорения и угловой скорости, датчик температуры и осушитель воздуха помещены в герметичном кожухе, содержащем минимальный объем воздуха, который через переходную плиту жестко связан с негерметичным кожухом, оснащенным радиатором, и который в свою очередь соединен с шаговым двигателем калибровки, размещенным на корпусе самодвижущейся платформы робототехнического комплекса, электронагреватель блока стабилизации температуры теплоносителя, в качестве которого используется термоэлектрический преобразователь в виде элемента Пельтье, и электровентилятор установлены внутри негерметичного кожуха, автоматический регулятор температуры выполнен в виде блока управления, который включает в себя микроконтроллер, выполняющий программу стабилизации температуры и управляющий работой подсистем калибровки и стабилизации температуры, микроконтроллер связан через устройство согласования интерфейса с бортовой ЭВМ робототехнического комплекса.
Размещение микромеханической инерциальной навигационной системы, датчика температуры и осушителя воздуха в герметичном кожухе, содержащем минимальный объем воздуха, позволяет с наименьшими затратами стабилизировать воздушный температурный режим.
Выполнение связи герметичного кожуха с негерметичным через переходную плиту позволяет осуществить тепловой обмен между блоком MEMS-датчиков и элементом Пельтье.
Оснащение негерметичного кожуха радиатором позволяет отводить тепловую энергию с элемента Пельтье в окружающую среду.
Соединение негерметичного кожуха с шаговым двигателем калибровки позволяет выполнять первичную калибровку MEMS-датчиков.
Размещение шагового двигателя на корпусе самодвижущейся платформы робототехнического комплекса позволяет:
- при размещении в наиболее удобном месте оптимизировать конструкцию в целом;
- использовать шаговый двигатель как базовый элемент для установки микромеханической инерциальной навигационной системы.
Использование в качестве электронагревателя блока стабилизации температуры теплоносителя элемента Пельтье позволяет:
- легко реализовать прямой отвод тепловой энергии или прямой обогрев системы без применения движущихся частей;
- обеспечить компактность и бесшумность работы электронагревателя;
- обеспечить как охлаждение, так и нагревание теплоносителя.
Установка электровентилятора внутри негерметичного кожуха позволяет обеспечить обдув радиатора потоком воздуха.
Выполнение автоматического регулятора температуры в виде блока управления на базе микроконтроллера позволяет:
- выполнить программу стабилизации температуры в зоне размещения блока MEMS-датчиков;
- управлять работой подсистемы калибровки;
- управлять работой подсистемы стабилизации температуры.
Реализация связи микроконтроллера через устройство согласования интерфейса с бортовой ЭВМ робототехнического комплекса позволяет:
- получать данные об уровне температуры теплоносителя;
- управлять работой микроконтроллера;
- передавать в бортовую ЭВМ данные о состоянии системы навигации.
Технические решения с признаками, отличающими заявляемое решение от прототипа, неизвестны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
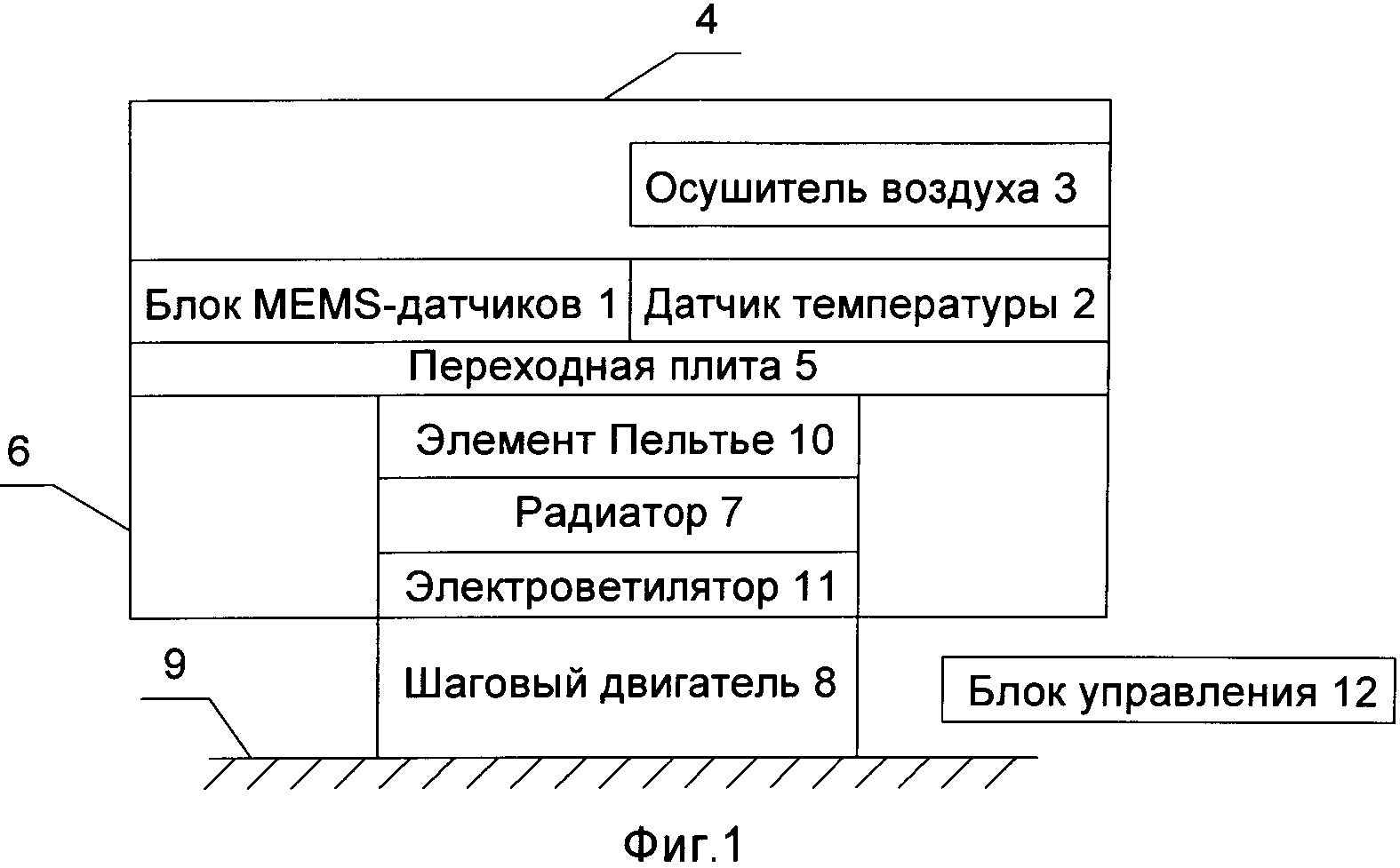
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема блока стабилизации температуры инерциальной навигационной системы; на фиг. 2 - структурная схема блока управления.
Блок стабилизации температуры инерциальной навигационной системы содержит блок MEMS-датчиков 1, датчик температуры 2 и осушитель воздуха 3, которые помещены в герметичном кожухе 4, который через переходную плиту 5 жестко связан с негерметичным кожухом 6, оснащенным радиатором 7, и который в свою очередь соединен с шаговым двигателем калибровки 8, размещенным на корпусе 9 самодвижущейся платформы робототехнического комплекса. Внутри негерметичного кожуха установлены электронагреватель блока стабилизации температуры теплоносителя в виде элемента Пельтье 10 и электровентилятор 11. Блок управления 12 включает в себя микроконтроллер 13, который связан с подсистемами калибровки 14 и стабилизации температуры 15, датчиком температуры 2 и - через устройство согласования интерфейса 16 с бортовой ЭВМ 17 робототехнического комплекса. Микроконтроллер 13 связан с шаговым двигателем 8 через драйвер шагового двигателя 18, а с элементом Пельтье 10 и электроветилятором 11 - через схему контроля направления и величины тока 19.
Блок стабилизации температуры инерциальной навигационной системы функционирует следующим образом.
В робототехническом комплексе, размещенном на самодвижущейся платформе, используется микромеханическая инерциальная навигационная система на базе блока MEMS-датчиков 1. Данная система, будучи оснащенной собственным вычислительным модулем, позволяет решать задачу позиционирования робототехнического комплекса в пространстве, в том числе и в условиях ограничения или отсутствия сигналов навигационных систем GPS/Глонасс.
Но при вычислении углов Эйлера (крен, тангаж, курс) точность не всегда бывает удовлетворительной. Заявленная скорость ухода нуля блока MEMS-датчиков 1 инерциальной навигационной системы составляет 2,5 градуса в секунду и с ростом температуры увеличивается. Причем с изменением окружающей температуры меняется масштабный коэффициент выходного сигнала, т.е. появляется нелинейность показаний. Установление характера этой нелинейности требует большого объема регулировочных работ и натурных испытаний и является трудоемкой задачей.
Несмотря на то что заявленная рабочая температура находится в диапазоне от минус 40°С до +85°С, на практике система неработоспособна, так как не принято никаких мер для стабилизации ее температуры. Одной из мер повышения точности микромеханической инерциальной навигационной системы является стабилизация температуры и удержание ее постоянной с минимальными колебаниями. Практически следует считать целесообразным стабилизацию с точностью ±0,5°С температуры +20°С для летних условий и минус 5°С для зимних условий. Выбор температуры +20°С обусловлен тем, что данная температура является стандартной для производства MEMS-датчиков и при этой температуре их параметры наиболее стабильны. Выбор температуры минус 5°С обусловлен тем, что данная температура ниже точки росы при нормальном атмосферном давлении для сухого воздуха, что позволяет избежать конденсации влаги. Наличие двух точек стабилизации требует дополнительной калибровки системы.
Важным моментом является выбор электронагревателя блока стабилизации температуры. Наиболее рациональным является использование в качестве устройства нагрева/охлаждения элемента Пельтье 10, который является термоэлектрическим преобразователем, принцип действия которого базируется на эффекте Пельтье - возникновении разности температур при протекании электрического тока. Данные элементы позволяют легко реализовать прямой отвод тепла или прямой обогрев прибора. Они компактны и бесшумны в работе.
Блок MEMS-датчиков 1 помещен в герметичный объем, образованный герметичным кожухом 4, содержащим минимальный объем воздуха, осушаемый осушителем 3, содержащим технический силикагель, и переходной плитой 5, являющейся тепловым мостом между блоком MEMS-датчиков 1 и элементом Пельтье 10. Тепловая энергия с элемента Пельтье 10 отводится в окружающую среду путем теплопередачи конвекцией в результате обдува радиатора 7 потоком воздуха от электровентилятора 11.
Для проведения первичной калибровки блока MEMS-датчиков 1 путем поворота на фиксированный угол с известной величиной угла и заданной угловой скоростью служит шаговый двигатель 8, вращающий блок стабилизации температуры. Шаговый двигатель 8 является базовым элементом конструкции и служит для крепления к корпусу 9 самодвижущейся платформы робототехнического комплекса.
Блок управления 12 предназначен для обработки сигналов с датчика температуры 2 и формирования управляющих сигналов. Блок управления 12 включает в себя микроконтроллер 13, выполняющий программу стабилизации температуры и управляющий работой подсистемы калибровки 14 и подсистемы стабилизации температуры 15. Подсистема калибровки 14 включает в себя шаговый двигатель 8, управляемый драйвером шагового двигателя 18. Команды управления драйвером шагового двигателя 18 формируются микроконтроллером 13 в процессе выполнения цикла калибровки. Подсистема стабилизации температуры 15 включает в себя датчик температуры 2, размещаемый в герметичном кожухе 4 на переходной плите 5 в непосредственной близости от блока MEMS-датчиков 1, схему контроля направления и величины тока 19, управляющую током, подаваемым на элемент Пельтье 10, и электровентилятор 11, предназначенный для повышения эффективности теплоотвода. Для управления работой микроконтроллера 13, а также для передачи информации о состоянии системы в бортовую ЭВМ 17 робототехнического комплекса служит устройство согласования интерфейса 16.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании блока стабилизации температуры инерциальной навигационной системы, устанавливаемого на самодвижущейся платформе робототехнического комплекса и обладающего высокой степенью стабильности поддержания температуры окружающей среды в рабочей зоне, что позволяет поддерживать высокую точность навигационных определений.
Блок стабилизации температуры инерциальной навигационной системы, содержащий объект стабилизации температуры, электровентилятор, электронагреватель блока стабилизации температуры теплоносителя, датчик температуры, автоматический регулятор температуры, отличающийся тем, что объект стабилизации температуры - микромеханическая инерциальная навигационная система, выполненная на основе MEMS-датчиков ускорения и угловой скорости, датчик температуры и осушитель воздуха помещены в герметичном кожухе, содержащем минимальный объем воздуха, который через переходную плиту жестко связан с негерметичным кожухом, оснащенным радиатором, и который в свою очередь соединен с шаговым двигателем калибровки, размещенным на корпусе самодвижущейся платформы робототехнического комплекса, электронагреватель блока стабилизации температуры теплоносителя, в качестве которого используется термоэлектрический преобразователь в виде элемента Пельтье, и электровентилятор установлены внутри негерметичного кожуха, автоматический регулятор температуры выполнен в виде блока управления, который включает в себя микроконтроллер, выполняющий программу стабилизации температуры и управляющий работой подсистем калибровки и стабилизации температуры, микроконтроллер связан через устройство согласования интерфейса с бортовой ЭВМ робототехнического комплекса.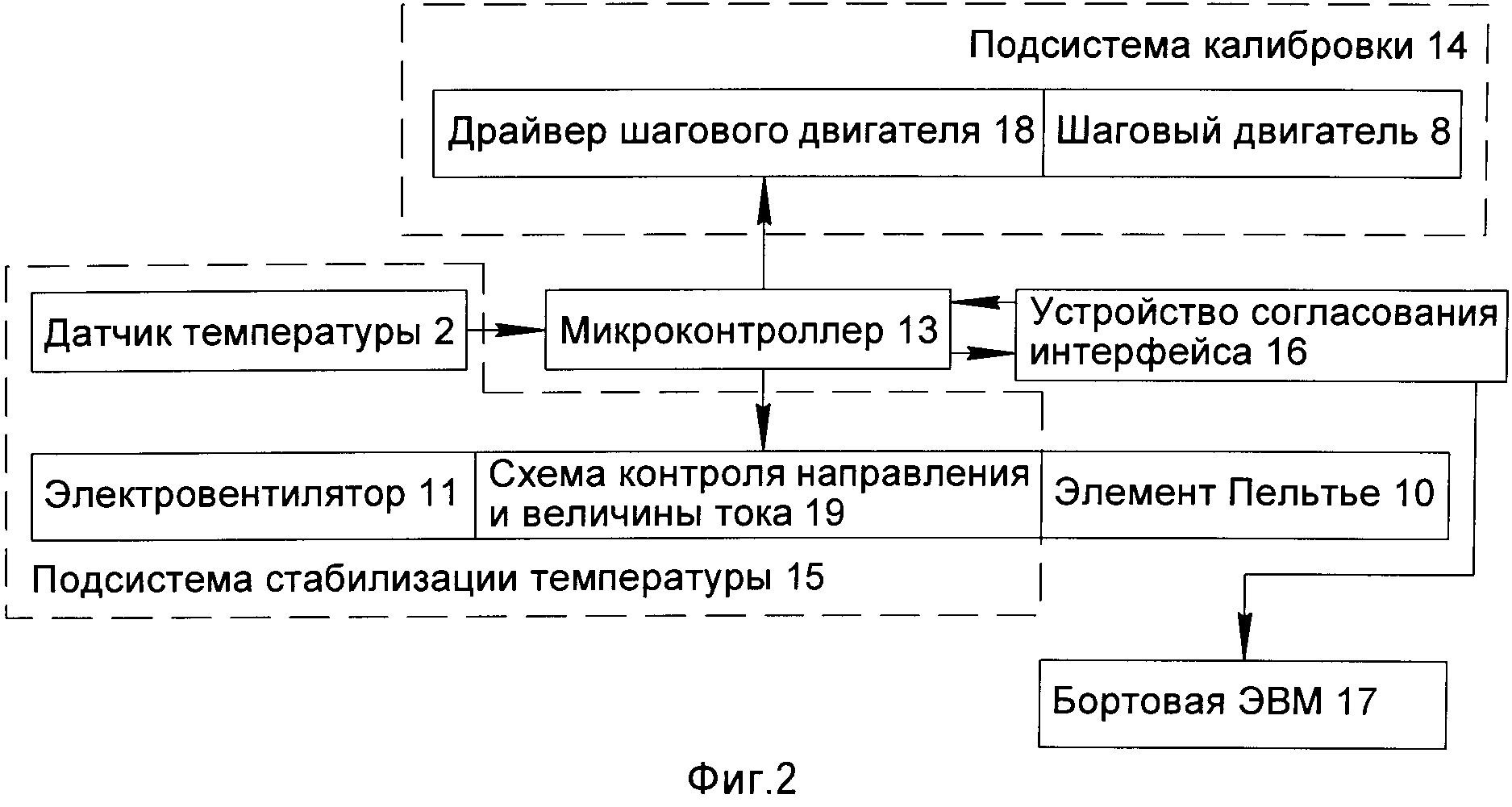
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы

