Результат интеллектуальной деятельности: АГРЕГАТ ДЛЯ ЖИВОТНОВОДСТВА
Вид РИД
Изобретение
Настоящее изобретение относится к агрегату для животноводства согласно преамбуле к п.1 формулы изобретения.
Изобретение относится к агрегату для животноводства, где животные входят и стоят на поворотной платформе, и где с животными, стоящими на поворотной платформе, проводятся обслуживающие действия, например доение, очистка соска и/или опрыскивание соска. Такие агрегаты для животноводства являются предпочтительными, так как они позволяют обслуживать большое количество животных в течение относительно короткого периода времени, то есть с высокой эффективностью. Уже делались предложения объединить такой агрегат для животноводства с доильным роботом для прикрепления в автоматическом режиме доильных стаканов доильного аппарата к соскам животных, стоящих на поворотной платформе.
Согласно первому решению, на платформе можно разместить несколько доильных роботов, при этом доильные роботы вращаются вместе с платформой. Недостатком этого решения является то, что для каждого доильного места нужно по одному доильному роботу. Согласно второму решению, доильный робот, или несколько доильных роботов, размещают рядом с платформой, при этом во время вращения платформы доильный робот прикрепляет доильные стаканы к тому животному, которое присутствует на доильном месте, находящемся перед доильным роботом.
В европейской патентной заявке EP-A-1 523 882 раскрыт агрегат для животноводства согласно второму решению. В варианте осуществления, описанном на фиг. 13а, проиллюстрирован рычаг, представляющий собой руку доильного робота. Доильный робот имеет устройство для определения положения соска животного, стоящего на доильной платформе. Рукой робота, в том числе вращением руки робота, управляют в соответствии с положением соска. В варианте осуществления, описанном на фиг. 13d, рычаг представляет собой руку доильного робота, установленного на подвижное транспортное средство, которое движется вдоль доильной платформы. На транспортном средстве имеется устройство для определения положения соска животного, стоящего на доильной платформе. Кроме того, этот вариант осуществления включает в себя стационарный рельс, по которому несколько носителей доильных стаканов перемещаются по пути, простирающемуся параллельно наружному краю доильной платформы.
В WO 2008/118068 раскрыт другой агрегат для животноводства согласно второму решению. Агрегат содержит несущее устройство, выполненное с возможностью расположения рядом с поворотной доильной платформой, приспособленной для вращения с окружной скоростью вокруг центральной оси и имеющей большое количество доильных мест, служащих для размещения соответствующего животного во время вращения поворотной доильной платформы. Несущее устройство содержит стационарный рельс, расположенный рядом с доильной платформой. По рельсу перемещается рука доильного робота, выполненная с возможностью прикрепления доильных стаканов к соскам животного на доильной платформе. Во время прикрепления доильных стаканов рука доильного робота перемещается по рельсу со скоростью, равной окружной скорости доильной платформы.
В WO 00/74472 раскрыт еще агрегат для животноводства согласно второму решению, в котором несущее устройство выполнено с возможностью расположения внутри поворотного доильного тракта, приспособленного для вращения вокруг центральной оси и имеющего ряд доильных мест. Несущее устройство содержит стационарный рельс, расположенный внутри поворотного доильного тракта. По рельсу перемещается рука доильного робота, выполненная с возможностью прикрепления доильных стаканов к соскам животного на доильной платформе. Во время прикрепления доильных стаканов рука доильного робота перемещается по рельсу.
Недостатком второго решения является трудность адаптации перемещений доильного робота не только к животному, но и к вращательному движению платформы.
Задачей настоящего изобретения является создание агрегата для животноводства, с помощью которого вышеуказанные проблемы могут быть устранены.
Эта задача решена с помощью изначально определенного агрегата для животноводства, отличающегося тем, что он содержит датчик, сообщающийся с блоком управления, и выполненный с возможностью определения текущего значения скорости доильной платформы, а также тем, что блок управления выполнен с возможностью управления первым приводным элементом для перемещения опорной платформы и ее следования за поворотной доильной платформой из начального положения в конечное положение во время части вращения поворотной доильной платформы.
Такое несущее устройство может быть основанием закреплено на грунте. Несущее устройство согласно изобретению поддерживает опорную платформу, на которой может быть расположен автоматический манипулятор, например доильный робот. Поскольку опорная платформа следует за поворотной доильной платформой из начального положения в конечное положение, можно позволить доильному роботу действовать так же, как если бы он был неподвижен относительно доильного места на поворотной доильной платформе. Таким образом, доильный робот может быть выполнен идентично стационарному доильному роботу у стационарного доильного места. Не нужно никаких дополнительных признаков доильного робота, и может быть использован обычный доильный робот с расположением его на опорной платформе несущего устройства.
Согласно варианту осуществления изобретения, блок управления выполнен с возможностью управления первым приводным элементом таким образом, что вторая ось пересекает одну и ту же радиальную линию поворотной доильной платформы во время упомянутой части вращения поворотной доильной платформы. Таким образом, первый приводной элемент служит для обеспечения того, чтобы центр опорной платформы во время части вращения поворотной доильной платформы перемещался с такой же, или точно такой же, угловой скоростью относительно центральной оси поворотной доильной платформы. Радиальная линия может представлять собой центральную линию одного из доильных мест или радиальную линию рядом с центральной линией. Последняя возможность является предпочтительной в случае, если животное стоит не посередине доильного места.
Согласно варианту осуществления изобретения, несущее устройство содержит второе подшипниковое устройство, соединенное с рычагом и обеспечивающее вращение опорной платформы относительно рычага вокруг второй оси, при этом приводное устройство содержит второй приводной элемент, сообщающийся с блоком управления и приспособленный для поворота опорной платформы вокруг второй оси. Предпочтительно, что диаметральное направление опорной платформы пересекает вторую ось перпендикулярно второй оси, при этом блок управления выполнен с возможностью управления вторым приводным элементом для поворота опорной платформы таким образом, что диаметральное направление опорной платформы во время упомянутой части вращения поворотной доильной платформы образует заданный угол с одной и той же радиальной линией поворотной доильной платформы. Предпочтительно, что заданный угол равен нулю, то есть диаметральное направление опорной платформы совпадает с одной и той же радиальной линией поворотной доильной платформы. Таким образом, второй приводной элемент служит для того, чтобы опорная платформа, и, соответственно, доильный робот, во время части вращения поворотной доильной платформы всегда имела одно и то же направление в горизонтальной плоскости относительно центральной оси поворотной доильной платформы. Диаметральное направление опорной платформы может иметь некоторый угол наклона относительно одной и той же радиальной линии поворотной доильной платформы, особенно в том случае, если животное не стоит прямо вдоль радиальной линии, пролегающей через доильное место.
Согласно варианту осуществления изобретения, приводное устройство содержит третий приводной элемент, сообщающийся с блоком управления и соединенный с рычагом, при этом блок управления выполнен с возможностью управления третьим приводным элементом таким образом, чтобы вторая ось во время части вращения поворотной доильной платформы находилась на заданном расстоянии от центральной оси поворотной доильной платформы. Таким образом, третий приводной элемент служит для того, чтобы расстояние от доильного робота до доильного места было заданным или постоянным во время части вращения поворотной доильной платформы. Заданное расстояние может быть различным для разных доильных мест поворотной доильной платформы в зависимости от длины животного, присутствующего на доильном месте.
Согласно варианту осуществления изобретения, рычаг содержит первый рычажный элемент, соединенный с первым подшипниковым устройством, а также второй рычажный элемент, соединенный с первым рычажным элементом через третье подшипниковое устройство, что обеспечивает вращение второго рычажного элемента относительно первого рычажного элемента вокруг третьей оси, ориентированной параллельно первой оси и второй оси. Предпочтительно, что третий приводной элемент приспособлен для вращения второго рычажного элемента вокруг третьей оси, что удерживает вторую ось во время части вращения поворотной доильной платформы на упомянутом заданном расстоянии от центральной оси поворотной доильной платформы.
Согласно варианту осуществления изобретения, часть вращения поворотной доильной платформы имеет длину, которая соответствует периферической длине одного из доильных мест.
Согласно варианту осуществления изобретения, блок управления выполнен с возможностью управления приводным устройством для возвращения опорной платформы из конечного положения в начальное положение после перемещения вдоль части вращения поворотной доильной платформы. Приводное устройство может быть выполнено с возможностью возврата опорной платформы по тому же пути, что и во время перемещения вдоль части вращения. Тем не менее также можно вернуть опорную платформу по другому пути, например, на большем расстоянии от центральной оси поворотной доильной платформы.
Согласно варианту осуществления изобретения, опорная платформа выполнена с возможностью несения автоматического манипулятора. Автоматический манипулятор может быть приспособлен для установки распылительной форсунки для распыления раствора на сосок животного, присутствующего на одном из доильных мест на поворотной доильной платформе, или же приспособлен для прикрепления обрабатывающей присоски к соску животного, присутствующего на одном из доильных мест на поворотной доильной платформе. Предпочтительно, что автоматический манипулятор может содержать базовый элемент, установленный на опорной платформе, а также руку робота, выполненную с возможностью прикрепления обрабатывающей присоски к соску. Кроме того, автоматический манипулятор может содержать сосковый датчик, служащий для определения положения соска, а также устройство управления, выполненное с возможностью управления рукой робота в качестве реакции на сообщение от соскового датчика.
Согласно варианту осуществления изобретения, на поворотной доильной платформе имеется магазин, при этом рука робота выполнена с возможностью захвата обрабатывающей присоски из магазина с последующим прикреплением обрабатывающей присоски к соску животного.
Согласно варианту осуществления изобретения, обрабатывающая присоска представляет собой доильный стакан доильного станка, расположенного на поворотной доильной платформе.
Согласно другому варианту осуществления изобретения, обрабатывающая присоска представляет собой стакан очистки сосков.
Согласно варианту осуществления изобретения, агрегат может содержать поворотную доильную платформу.
Настоящее изобретение теперь будет объяснено путем описания предпочтительных вариантов осуществления и со ссылкой на приложенные здесь чертежи, где:
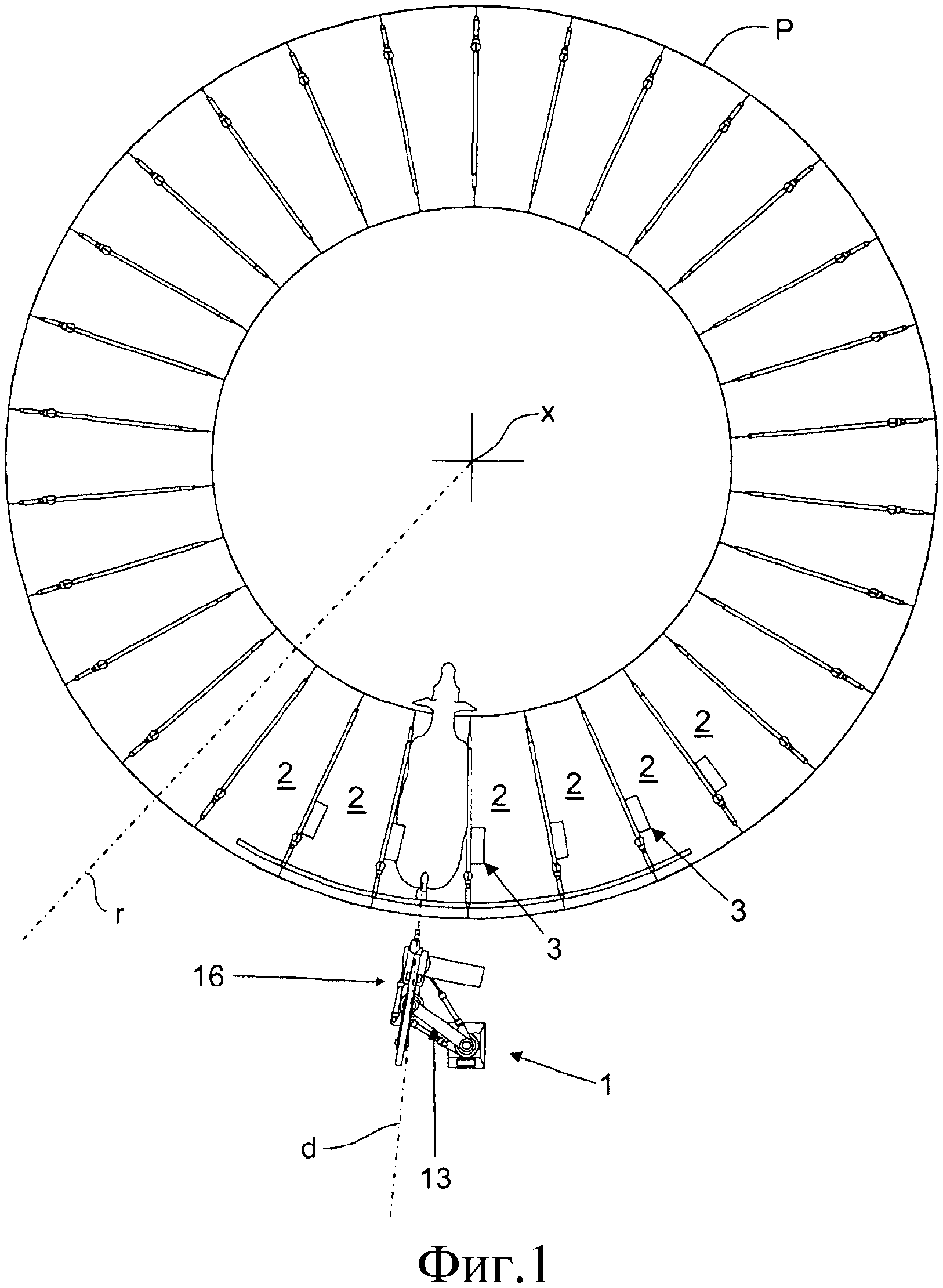
на фиг. 1 показан вид сверху агрегата для животноводства согласно настоящему изобретению.
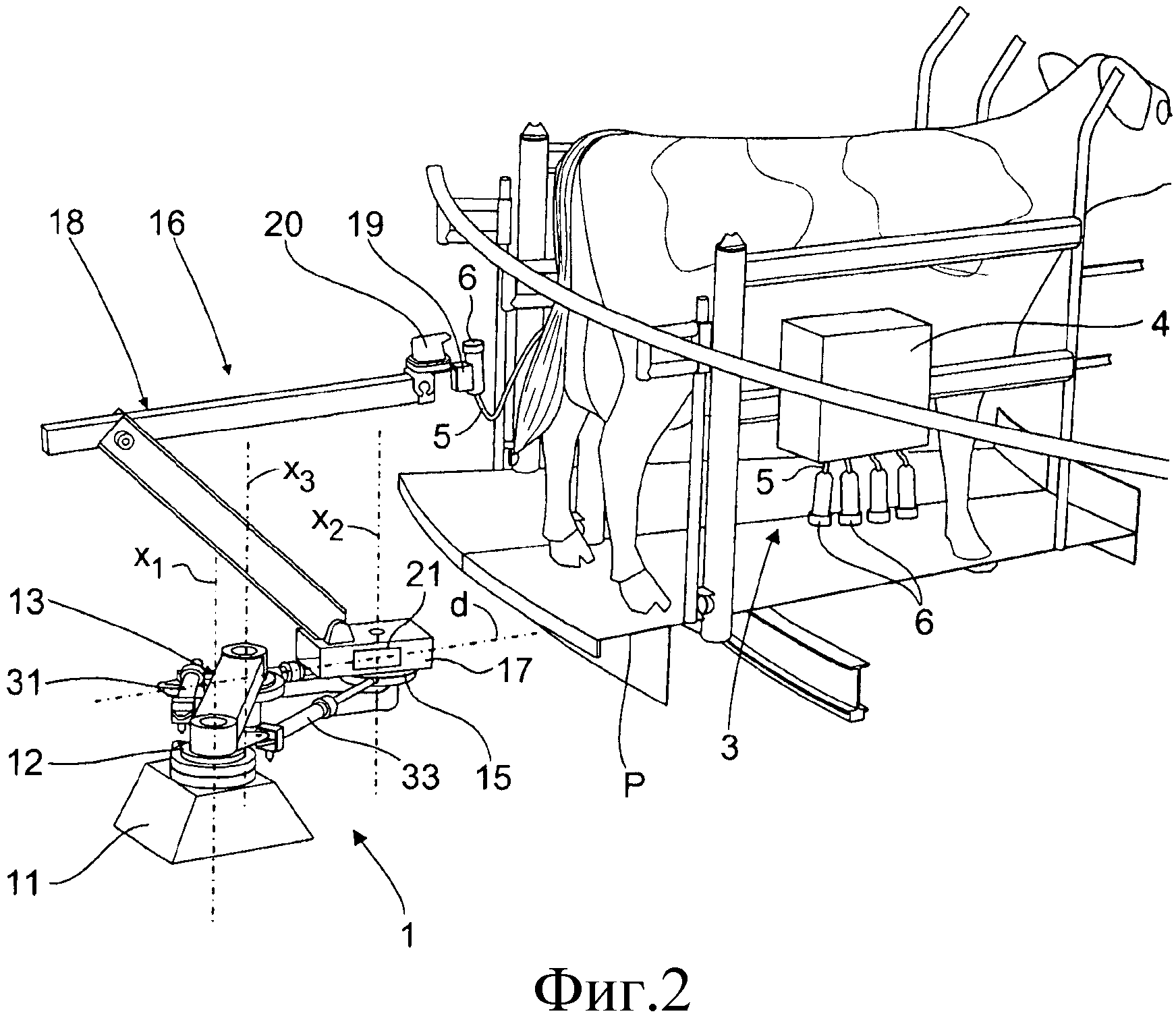
На фиг. 2 проиллюстрирован вид в перспективе части агрегата, показанного на фиг. 1.
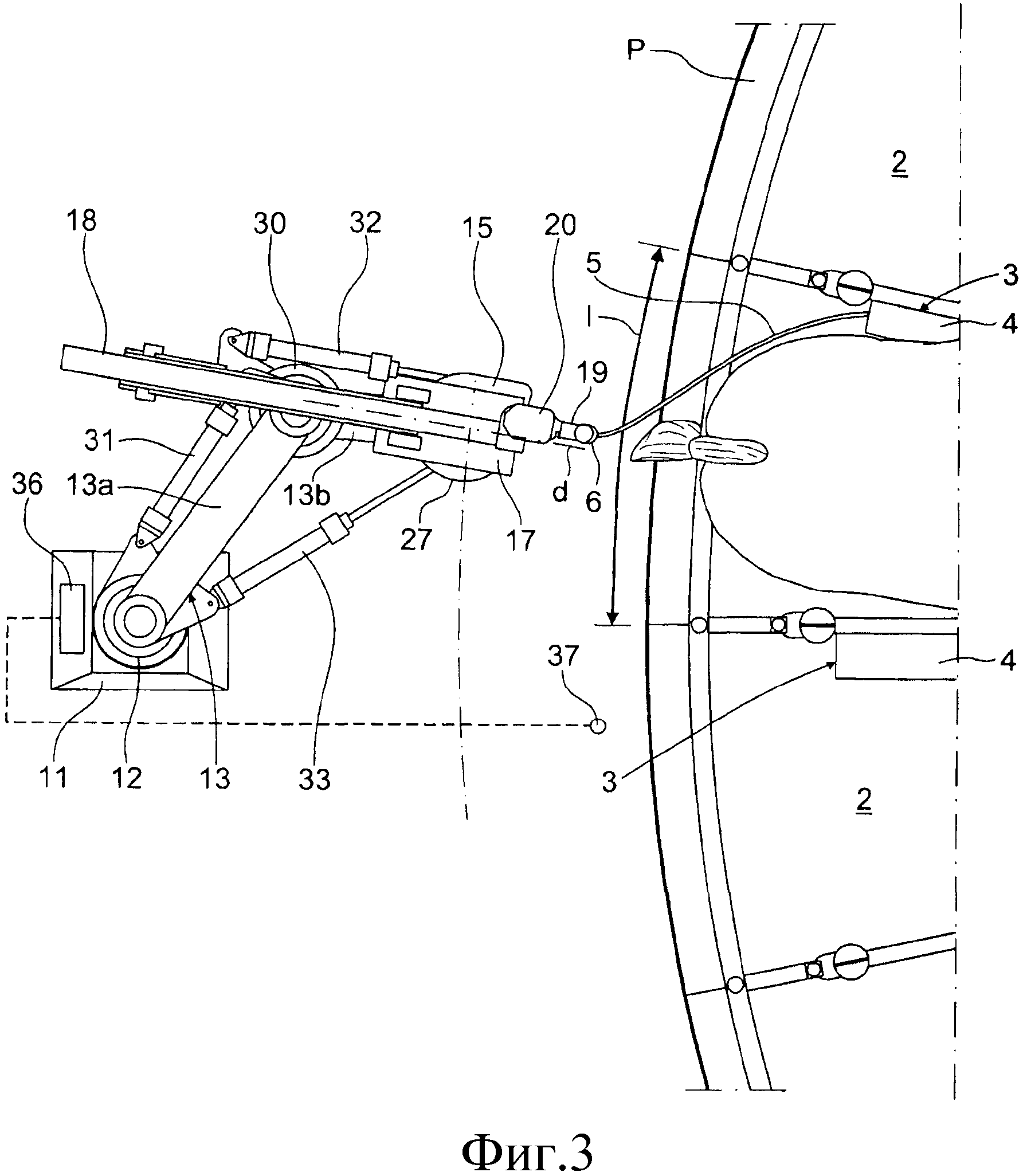
На фиг. 3 проиллюстрирован вид сверху части агрегата, показанного на фиг.1.
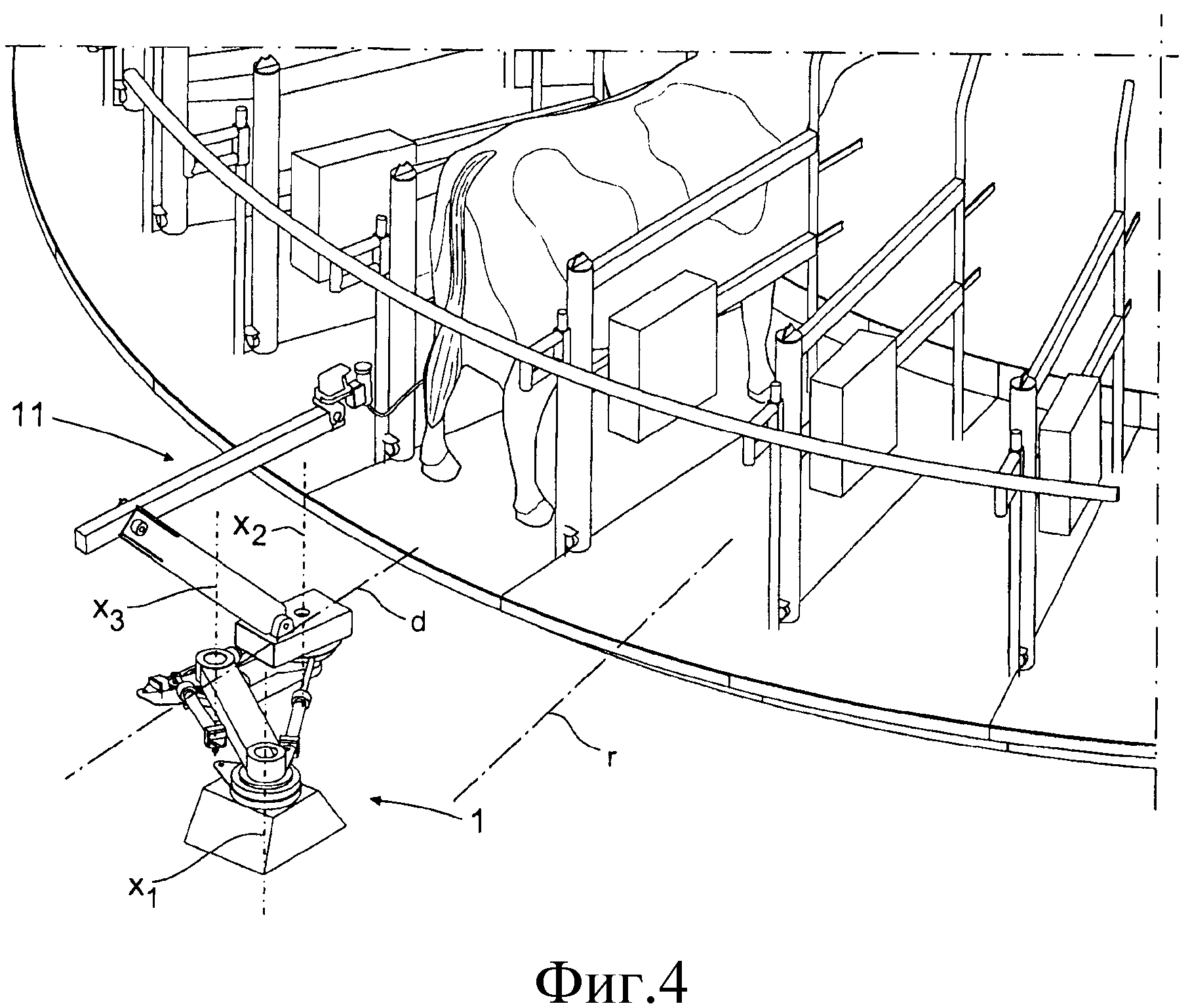
На фиг. 4 проиллюстрирован вид в перспективе части агрегата, показанного на фиг. 1.
Агрегат для животноводства согласно настоящему изобретению теперь будет описан со ссылкой на фиг. 1-4. Агрегат для животноводства, показанный на фиг. 1, содержит два несущих устройства 1, расположенных рядом с поворотной доильной платформой P. Следует отметить, что агрегат для животноводства также может содержать только одно или более двух таких несущих устройств 1. Конструкция такого несущего устройства показана более подробно на фиг. 2-4.
Поворотная доильная платформа P может входить в состав агрегата для животноводства, или же несущее устройство или несущие устройства агрегата для животноводства могут быть расположены рядом с поворотной доильной платформой P и взаимодействовать с поворотной доильной платформой P способом, описанным ниже.
Поворотная доильная платформа P приспособлена для вращения со скоростью доильной платформы вокруг вертикальной центральной оси х поворотной доильной платформы P. Соответствующее приводное устройство (не показано) предназначено для вращения поворотной доильной платформы P с постоянной скоростью доильной платформы или переменной скоростью доильной платформы. Поворотная доильная платформа P имеет множество доильных мест 2, например, более 12 доильных мест 2, служащих для приемки соответствующего животного во время вращения поворотной доильной платформы P. Каждое доильное место 2 имеет периферийную длину I. Поворотная доильная платформа P имеет или образует бесконечное число радиальных линий r, каждая из которых пролегает перпендикулярно центральной оси х в радиальном направлении.
На каждом или по существу каждом доильном месте 2 на поворотной доильной платформе P имеется доильный станок 3, см. фиг. 2. Доильный станок 3 известным способом соединен с источником вакуума и соответствующими молокосборными емкостями (не показаны). Доильный станок 3 также содержит магазин 4, например, магазин доильных стаканов, а также четыре молокопровода 5, каждый из которых несет доильный стакан 6. Следует отметить, что доильный стакан 6 может представлять собой обрабатывающую присоску любого типа, т.е. не только доильный стакан 6 для доения животного, но и подготовительный доильный стакан или стакан очистки сосков для чистки и массажа, а также, возможно, освобождения животного от молозива. Магазин 4, показанный на фиг. 2, может также проиллюстрировать эти возможности, когда обрабатывающая присоска представляет собой стакан очистки сосков или подготовительный доильный стакан.
Несущее устройство 1 содержит основание 11 для размещения на грунте или на полу стационарным способом. Таким образом, основание 11 может представлять собой стационарное основание. Основание 11 может также быть подвижным по отношению к грунту. В этом случае основание 11 содержит средство, обеспечивающее такую фиксацию основания в грунте, что оно становится стационарным относительно грунта. Предпочтительно, что основание может быть установлено на рельс (не показан), пролегающий в радиальном направлении вдоль радиальных линий r таким образом, чтобы расстояние между основанием 11 и поворотной доильной платформой P было регулируемым. Средство фиксации (не показано) служит для фиксации основания 11 на нужном расстоянии от поворотной доильной платформы P.
Несущее устройство 1 также содержит первое подшипниковое устройство 12, расположенное на основании 11, а также рычаг 13, соединенный с первым подшипниковым устройством 12, что позволяет рычагу 13 вращаться относительно основания 11 вокруг первой оси x1. Первая ось Х пролегает параллельно или по существу параллельно центральной оси x поворотной доильной платформы P.
Кроме того, несущее устройство 1 содержит опорную платформу 15, которая соединена с рычагом 13 и приспособлена для размещения автоматического манипулятора 16. Автоматический манипулятор 16 служит для прикрепления доильных стаканов 6 доильного станка 3 к животному, присутствующему на одном из доильных мест 2 на поворотной доильной платформе P. Автоматический манипулятор 16 может быть скомпонован или спроектирован в виде так называемого универсального доильного робота. Автоматический манипулятор 16 содержит базовый элемент 17, расположенный на и/или установленный на опорную платформу 15, а также руку 18 робота, выполненную с возможностью прикрепления доильного стакана 6 к соску. Рука 18 робота имеет захватный элемент 19 на своем дистальном конце для захвата доильного стакана 6. Кроме того, рука 18 робота несет сосковый датчик 20, например, видеокамеру или любой другой подходящий датчик. Сосковый датчик 20 выполнен с возможностью определения положения соска животного, присутствующего на доильном месте 2 поворотной доильной платформы P. Автоматический манипулятор 16 также содержит устройство управления, схематически обозначенное ссылочной позицией 21. Устройство 21 управления выполнено с возможностью управления рукой 18 робота и захватным элементом 19 в качестве реакции на сообщение от соскового датчика 20. Следует отметить, что автоматический манипулятор 16 также может быть оснащен распылительной форсункой (не показана), приспособленной для распыления соответствующего дезинфицирующего раствора на сосок после окончания доения. Распылительная форсунка может захватываться и удерживаться захватным элементом 19, или может являться частью руки 18 робота автоматического манипулятора 16.
Несущее устройство 1 также содержит второе подшипниковое устройство 27, соединенное с рычагом 13 и позволяющее опорной платформе 15 поворачиваться относительно рычага 13 вокруг второй оси x2. Вторая ось x2 пролегает параллельно или по существу параллельно первой оси x1 и центральной оси х. Второе подшипниковое устройство 27, как видно из Фиг. 3, находится на внешнем конце рычага 13 и поддерживает опорную платформу 15 с возможностью поворота.
Рычаг 13 содержит первый рычажный элемент 13а, соединенный с первым подшипниковым устройством 12, а также второй рычажный элемент 13b, несущий второе подшипниковое устройство 27. Первый рычажный элемент 13а и второй рычажный элемент 13b соединены друг с другом через третье подшипниковое устройство 30, что позволяет второму рычажному элементу 13b поворачиваться относительно первого рычажного элемента 13а вокруг третьей оси x3. Третья ось x3 пролегает через третье подшипниковое устройство 30 параллельно или по существу параллельно первой оси x1, второй оси x2 и центральной оси х.
Опорная платформа 15 имеет или образует диаметральное направление d, которое пересекает вторую ось x2 перпендикулярно второй оси x2. Опорная платформа 15 также имеет или образует поверхность крепления или элемент крепления, на котором размещен или установлен автоматический манипулятор 16. Поверхность крепления, может, например, быть образована верхней плоской поверхностью. Такая плоская поверхность может пролегать параллельно горизонтальной плоскости.
Несущее устройство 1 также содержит приводное устройство 31, 32, 33, выполненное с возможностью перемещения опорной платформы 15. Приводное устройство 31, 32, 33 содержит первый приводной элемент 31, соединенный с основанием 11 и рычагом 13 и выполненный с возможностью поворота рычага 13 вокруг первой оси x3. Приводное устройство 31, 32, 33 содержит также второй приводной элемент 32, соединенный с рычагом 13 и опорной платформой 15 и выполненный с возможностью поворота опорной платформы 15 вокруг второй оси x2. Кроме того, приводное устройство 31, 32, 33 содержит третий приводной элемент 33, соединенный с первым рычажным элементом 13а и вторым рычажным элементом 13b и выполненный с возможностью поворота второго рычажного элемента 13b вокруг третьей оси x3.
Агрегат для животноводства содержит блок управления, схематически обозначенный ссылочной позицией 36, а также датчик, схематически обозначенный ссылочной позицией 37. Датчик 37 сообщается с блоком 36 управления. Датчик 37 выполнен с возможностью определения текущего значения скорости доильной платформы. Датчик 37 может быть любого пригодного типа, например оптический датчик, считывающий оптическое изображение на поворотной доильной платформе P, или датчик, соединенный с приводным устройством для поворотной доильной платформы P.
Блок 36 управления также сообщается с приводным устройством, а точнее, с первым приводным элементом 31, вторым приводным элементом 32 и третьим приводным элементом 33. Следует отметить, что блок 36 управления может также сообщаться с сосковым датчиком 20, так что при управлении приводным устройством 31, 32, 33 несущего устройства 1 может учитываться положение животного на доильном месте.
Таким образом, блок 36 управления выполнен с возможностью управления первым приводным элементом 31 для поворота рычага 13 вокруг первой оси x1, управления вторым приводным элементом 32 для поворота опорной платформы 15 вокруг оси x2 и управления третьим приводным элементом 33 для поворота второго рычажного элемента 13b относительно первого рычажного элемента 13а вокруг третьей оси x3.
В частности, блок 36 управления выполнен с возможностью управления первым приводным элементом 31 для поворота рычага 13, с соответствующим перемещением опорной платформы 15 с целью следования за поворотной доильной платформой P при ее вращении из начального положения в конечное положение во время части вращения поворотной доильной платформы P. Часть вращения поворотной доильной платформы P имеет длину, или протяженность, которая соответствует периферической длине I каждого из доильных мест 2. Таким образом, вторая ось x2 будет пересекать одну и ту же радиальную линию r поворотной доильной платформы P во время части вращения поворотной доильной платформы Р, т.е. при вращении из начального положения в конечное положение. Выбор радиальной линии может быть задан заранее, например центральная линия доильного места 2, либо сделан в зависимости от животного, присутствующего на доильном месте 2, при этом блок 36 управления может быть выполнен с возможностью приемки сообщения о положении животного от соскового датчика 20. Таким образом, благодаря перемещению, произведенному первым приводным элементом 31, расстояние от опорной платформы 15 до сосков животного будет, по существу, постоянным во время части вращения поворотной доильной платформы P при прикреплении доильных стаканов 6 к соскам животного на втором доильном месте.
Блок 36 управления выполнен с возможностью управления вторым приводным элементом 32 для поворота опорной платформы 15 таким образом, чтобы диаметральное направление d опорной платформы 15 во время части вращения поворотной доильной платформы P совпадало, или образовывало заданный угол с одной и той же радиальной линией поворотной доильной платформы P. Таким образом, автоматический доильный аппарат 16 будет иметь постоянное направление или ориентацию по отношению к животному на доильном месте 2 во время части вращения на поворотной доильной платформе Р, т.е. при перемещении из начального положения в конечное положение. Диаметральное направление может предпочтительно совпадать с одной и той же радиальной линией, т.е. заданный угол представляет собой заранее заданную нулевую величину. В случае если животное не стоит прямо на доильном месте, может оказаться целесообразным отклонить этот угол от нуля. Тогда угол может быть задан на основе показаний соскового датчика 20, который может быть выполнен с возможностью определения непрямого положения животного на доильном месте 2 и выдачи сообщения о считанном положении на блок 36 управления.
Блок 36 управления выполнен с возможностью управления третьим приводным элементом 33 для поворота второго рычажного элемента 13b относительно первого рычажного элемента 13а вокруг третьей оси x3 таким образом, чтобы вторая ось x3 удерживалась на постоянном расстоянии от центральной оси х поворотной доильной платформы P во время части вращения поворотной доильной платформы Р, т.е. из начального положения в конечное положение. Таким образом, расстояние от автоматического манипулятора 16 до сосков животного хочет быть постоянным во время, по существу, части вращения поворотной доильной платформы Р. Расстояние может быть заранее заданным, либо заданным в зависимости, например, от длины животного, присутствующего на доильном месте 2, при этом длина животного может быть считана и сообщена блоку 36 управления через сосковый датчик 20.
Кроме того, блок 36 управления выполнен с возможностью управления приводным устройством, т.е. первым приводным элементом 31, вторым приводным элементом 32 и третьим приводным элементом 33, с целью возвращения опорной платформы 15 из конечного положения в начальное положение после перемещения вдоль части вращения поворотной доильной платформы Р. Таким образом, автоматический манипулятор 16 будет находиться в одном положении и одной ориентации по отношению к животному, присутствующему на очередном доильном месте 2 поворотной доильной платформы P.
Настоящее изобретение не ограничено описанными вариантами осуществления, но может быть изменено и модифицировано в пределах объема последующей формулы изобретения.
Стойло, устройство в стойле и способ монтажа указанного устройства
Щетка для домашнего скота, устройство, содержащее щетку данного типа, и способ обработки щеткой домашнего скота
Устройство для ухода
Вращающийся зал для доения животных
Схема и способ обнаружения
Доильный зал и способ его работы
Установка для автоматической мойки доильных стаканов роторной доильной платформы
Промывочная система для устройства очистки сосков
Хлорированное щелочное моющее средство трубопровода с метансульфокислотой
Способ сборки эластичных паркетных досок, которые снабжены механической блокирующей системой
Стойло, устройство в стойле и способ монтажа указанного устройства
Щетка для домашнего скота, устройство, содержащее щетку данного типа, и способ обработки щеткой домашнего скота
Устройство для ухода
Вращающийся зал для доения животных
Схема и способ обнаружения
Доильный зал и способ его работы
Установка для автоматической мойки доильных стаканов роторной доильной платформы
Промывочная система для устройства очистки сосков
Хлорированное щелочное моющее средство трубопровода с метансульфокислотой
Способ сборки эластичных паркетных досок, которые снабжены механической блокирующей системой

