Результат интеллектуальной деятельности: ОПТИМИЗАЦИЯ ПРЕОБРАЗОВАТЕЛЯ СФОКУСИРОВАННОГО УЛЬТРАЗВУКА ВЫСОКОЙ ИНТЕНСИВНОСТИ
Вид РИД
Изобретение
Настоящая заявка особенно полезна в процедурах и системах удаления с помощью сфокусированного ультразвука высокой интенсивности (HIFU), направляемого на основе магнитного резонанса (MR). Однако, следует понимать, что описанная технология(-и) может также находить применение в других типах систем планирования терапии, других системах терапии, направляемых изображением, и/или при других медицинских применениях.
Рак печени является одним из самых распространенных типов опухоли и особенно труден для оперирования, поскольку имеет тенденцию сильного кровотечения. Процедуры удаления поэтому получают широкое распространение при его лечении, в том числе, термическое удаление с помощью высокочастотных (RF) или лазерных зондов, криобляция и т.д.
Использование сфокусированного ультразвука высокой интенсивности (HIFU) постепенно становится все более популярным. Одна из причин состоит в том, что получение изображения посредством магнитного резонанса (MR) может использоваться для контроля температуры ткани во время процедуры, делая саму процедуру менее опасной. При удалении печени существуют две большие проблемы: печень имеет большой кровоток и она циркулирует при дыхании пациента. Другая проблема состоит в том, что печень расположена позади ребер, которые препятствуют передаче HIFU.
Вообще говоря, одна проблема, связанная с процедурами HIFU, направляемыми на основе MR, состоит в том, что трудно распределить подводимое тепло в правильных местах: с одной стороны интересующая область (ROI), например, опухоль, должна быть удалена. С другой стороны, области перед ней (ближняя зона) или позади нее (дальняя зона), если смотреть от преобразователя, должны остаться нетронутыми. В случае печени проблема усугубляется тем фактом, что печень эффективно охлаждается кровотоком, увеличивая потребность в ультразвуковой мощности, и в то же самое время ребра ограничивают доступность области ROI. Проблема ребер является двойной: во-первых, часть пучка, попадающая на ребра, не может достигнуть интересующей области, и, во-вторых, ребра чувствительны к ультразвуковому излучению, потому что они эффективно его поглощают и поэтому легко перегреваются.
Классические процедуры планирования предназначены, главным образом, для обработки ультразвуком органов, которые могут быть достигнуты напрямую, без облучения между ребрами, например, матки. Фокальная точка преобразователя направляется на интересующее место. В самых сложных системах используются как механическое, использующее двигатели, так и электронное управление направлением, используя фазированные матрицы элементов преобразователя.
В настоящее время состояние техники при планировании лечения таково, что инструмент программного обеспечения планирования используется, чтобы описать желаемые положение преобразователя и клеток для лечения, используя MRI-изображения, полученные от пациента. Программное обеспечение визуализирует акустическую траекторию поверх MRI-изображений, чтобы выявить, находятся ли какие-либо критические органы на траектории пучка или в пределах запаса безопасности. Акустический пучок моделируется просто как геометрический конус от преобразователя к фокусу и в дальнюю зону. Во время лечения используется обработка маломощным ультразвуком, чтобы обнаружить и вручную корректировать пространственное отклонение от намеченного фокуса, и тепловой контроль используется в качестве обратной связи для управления тепловым нагреванием.
Общие числовые способы решения распространения волн известны в литературе. В области медицинского ультразвука наиболее заметными подходами являются методы на основе временной области, метод конечных элементов и различные производные релеевского интеграла.
При традиционных технологиях обработки и планирования обработки акустическая траектория, как предполагается, должна проходить через воду (например, водяной фантом). Однако, вдоль акустической траектории через человека или пациента существуют различные материалы и ткани с различными акустическими свойствами. В частности, хорошо известна роль подкожного жира как источника акустического искажения. Рефракция на границах поверхностей раздела вызывает смещение акустического фокуса от целевого положения, а отклонение фазы за счет разных длин акустических траекторий ухудшает резкость пятна. С этими проблемами традиционно приходится иметь дело при использовании эмпирических ручных коррекций и тепловой обратной связи. Решение этих задач может быть облегчено, моделируя должным образом акустическую траекторию.
Традиционная схема обработки создается, используя геометрические конусы, так чтобы весь соответствующий объем был покрыт ультразвуковыми волнами. Однако, часто вдоль акустической траектории располагаются значительно искажающие объекты (то есть, препятствия), такие как кости. Кости увеличивают количество отражений и дифракции волн, искажая форму фокуса и нанося потенциальный вред как пациенту, так и ультразвуковому преобразователю.
Для методик моделирования с точными числовыми методами, такими как метод конечных элементов или релеевский интеграл, геометрия проблемы обычно описывается как дискретная сетка, состоящая из конечных геометрических примитивов, таких как треугольники. Примитивы имеют размеры в доли длины волны. Общая особенность задачи акустического моделирования заключается в том, что рассматриваемые структуры являются относительно большими с точки зрения акустических длин волн, приводя в результате к соответственно большой сетке. Подробности варьируются в соответствии с конкретным используемым числовым способом, но общим для всех этих способов являются взаимодействия малых примитивов друг с другом. Для больших сеток это приводит в результате к таким длительным временам моделирования, что способ может быть экономически невыгодным в интерактивном режиме. Например, один популярный способ использования такого способа состоит в том, чтобы использовать рабочий день для планирования и подготовки задачи моделирования, и выполнять фактическое вычисление ночью или во время выходных.
В уровне технике существует потребность в системах и способах, облегчающих автоматизированную оптимизацию свойств элемента преобразователя HIFU, чтобы использовать межреберное пространство у пациента для траектории удаления и т.п., преодолевая, таким образом, недостатки, отмеченные выше.
В соответствии с одним аспектом, инструмент планирования терапии, который облегчает планирование удаления сфокусированным ультразвуком высокой интенсивности (HIFU), направляемого на основе магнитного резонанса (MR), содержит процессор, исполняющий исполняемые компьютером команды для оптимизации передачи элементом преобразователя HIFU, причем команды содержат оценку данных преобразователя, в том числе информацию о положении, геометрии и акустическом параметре элемента преобразователя. Команды дополнительно содержат оценку трехмерных MR-данных, в том числе данных интересующей области, описывающих размер, форму и положение интересующей области (ROI), которая должна быть подвергнута удалению, и данные препятствия, описывающие размер, форму и положение препятствия между одним или более элементами преобразователя HIFU и ROI. Дополнительно, команды содержат выполнение оптимизации, которая максимизирует подачу сигнала HIFU к ROI, минимизируя подачу сигнала HIFU к препятствию и окружающей ткани. Инструмент планирования дополнительно содержит память, в которой хранятся исполняемые компьютером инструкции, данные преобразователя, MR-данные и множество оптимизированных параметров HIFU.
В соответствии с другим аспектом, способ планирования удаления с помощью сфокусированного ультразвука высокой интенсивности (HIFU), направляемого на основе магнитного резонанса (MR), содержит оценку данных преобразователя, в том числе информацию о положении элемента преобразователя, геометрии и акустических параметрах, и оценку трехмерных MR-данных, содержащих данные ROI, описывающие размер, форму и положение интересующей области (ROI), которая должна быть удалена, и данные препятствия, описывающие размер, форму и положение препятствия между одним или более элементами преобразователя HIFU и ROI. Способ дополнительно содержит выполнение оптимизации, которая максимизирует подачу сигнала HIFU к ROI, минимизируя подачу сигнала HIFU к препятствию и окружающей ткани.
В соответствии с другим аспектом, способ выполнения моделирования ультразвуковой обработки на месте для процедуры удаления с помощью сфокусированного ультразвука высокой интенсивности (HIFU), направляемого на основе MR, содержит создание модели акустической траектории специфичной для пациента, предоставляющей пользователю модель акустической траектории через интерфейс пользователя, и принимающей от пользователя ввод данных в отношении коррекции по меньшей мере положения одного или более элементов преобразователя HIFU или амплитуды и фазы передачи одного или более элементов преобразователя HIFU. Способ дополнительно содержит моделирование обработки HIFU-ультразвуком интересующей области (ROI), используя модель акустической траектории и ввод данных пользователем.
Одним из преимуществ является уменьшение экспозиции HIFU для здоровой ткани.
Другое преимущество заключается в максимизации экспозиции HIFU в ROI.
Еще одно преимущество заключается в использовании акустических моделирований для моделирования формы фокуса и контроля полей рассеяния.
Еще одно преимущество заключается в возможности избежать перегрева чувствительных тканей.
Другие дополнительные преимущества новизны предмета изобретения должны быть оценены специалистами в данной области техники после прочтения и понимания последующего подробного описания.
Чертежи служат только для целей иллюстрирования различных аспектов и не должны рассматриваться как ограничение.
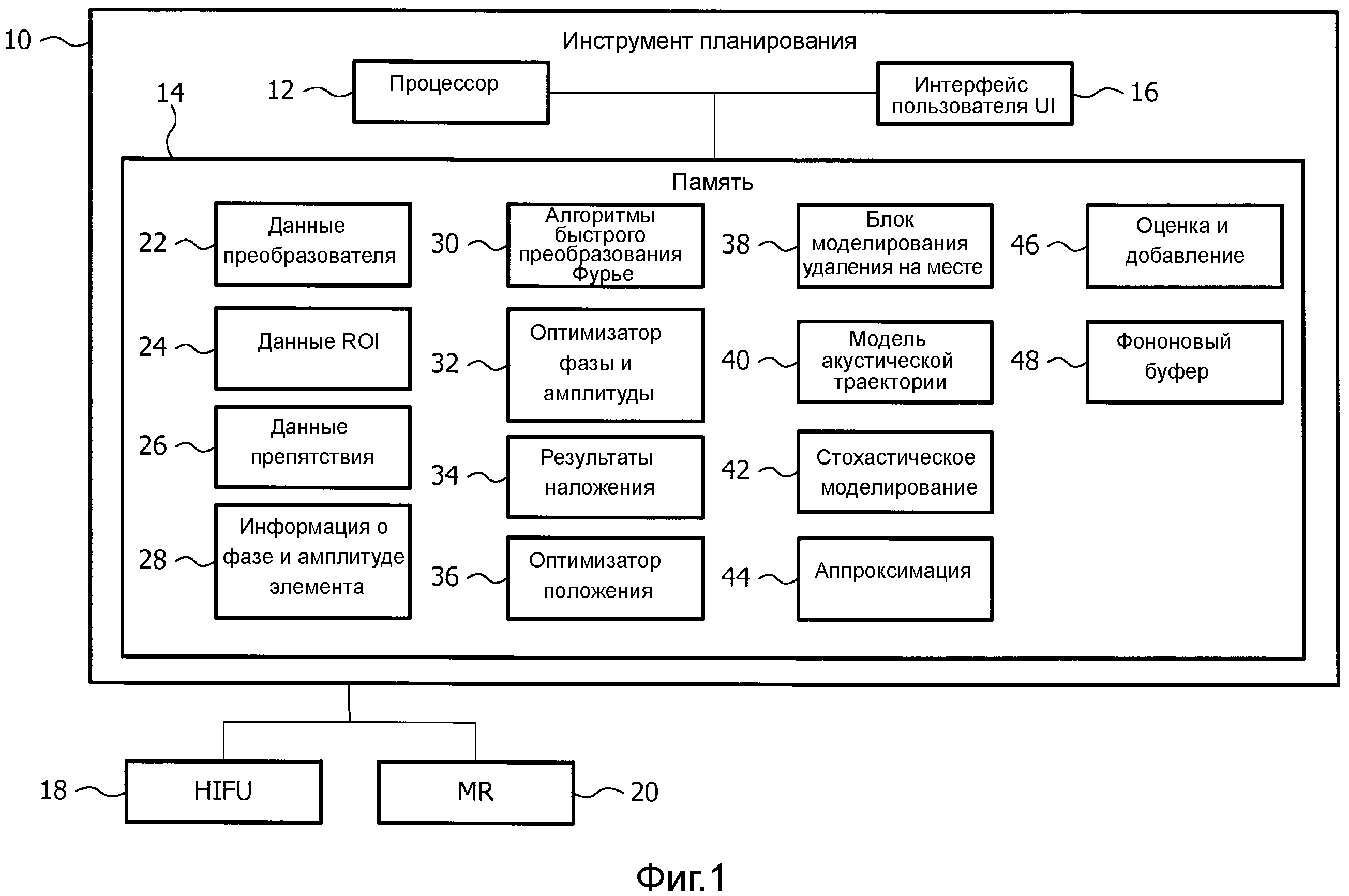
Фиг.1 - инструмент планирования, облегчающий оптимизацию фазы, амплитуды, положения и т.п. элемента преобразователя, и т.д. и выполнение быстрых акустических моделирований на месте во время планирования обработки ультразвуком.
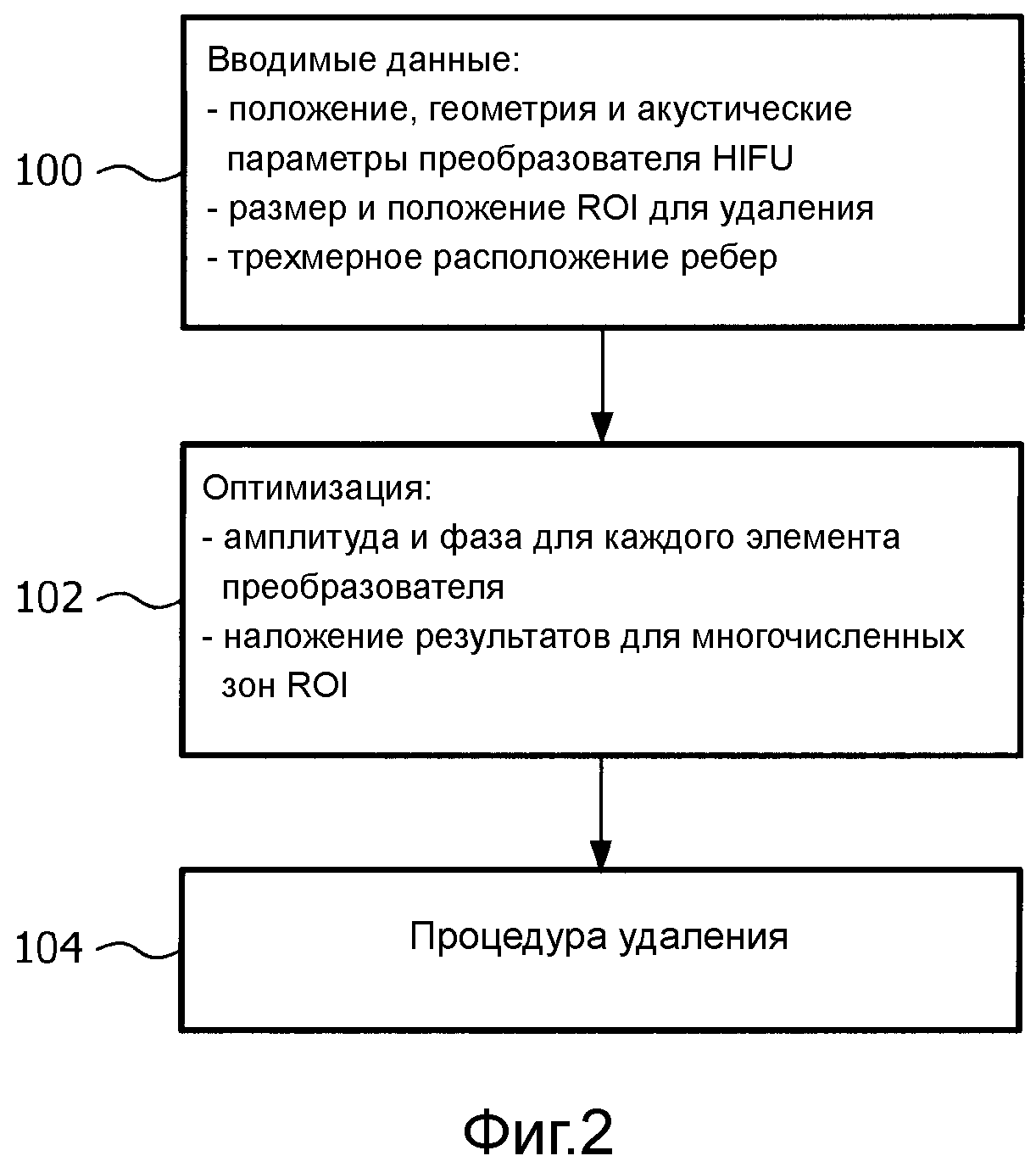
Фиг.2 - последовательность выполнения операций оптимизации параметров передачи (например, амплитуды и фазы), соответствующих заданному положению, геометрии и акустическим параметрам преобразователя HIFU, учитывая размер и положение ROI для удаления и мест расположения ребер.
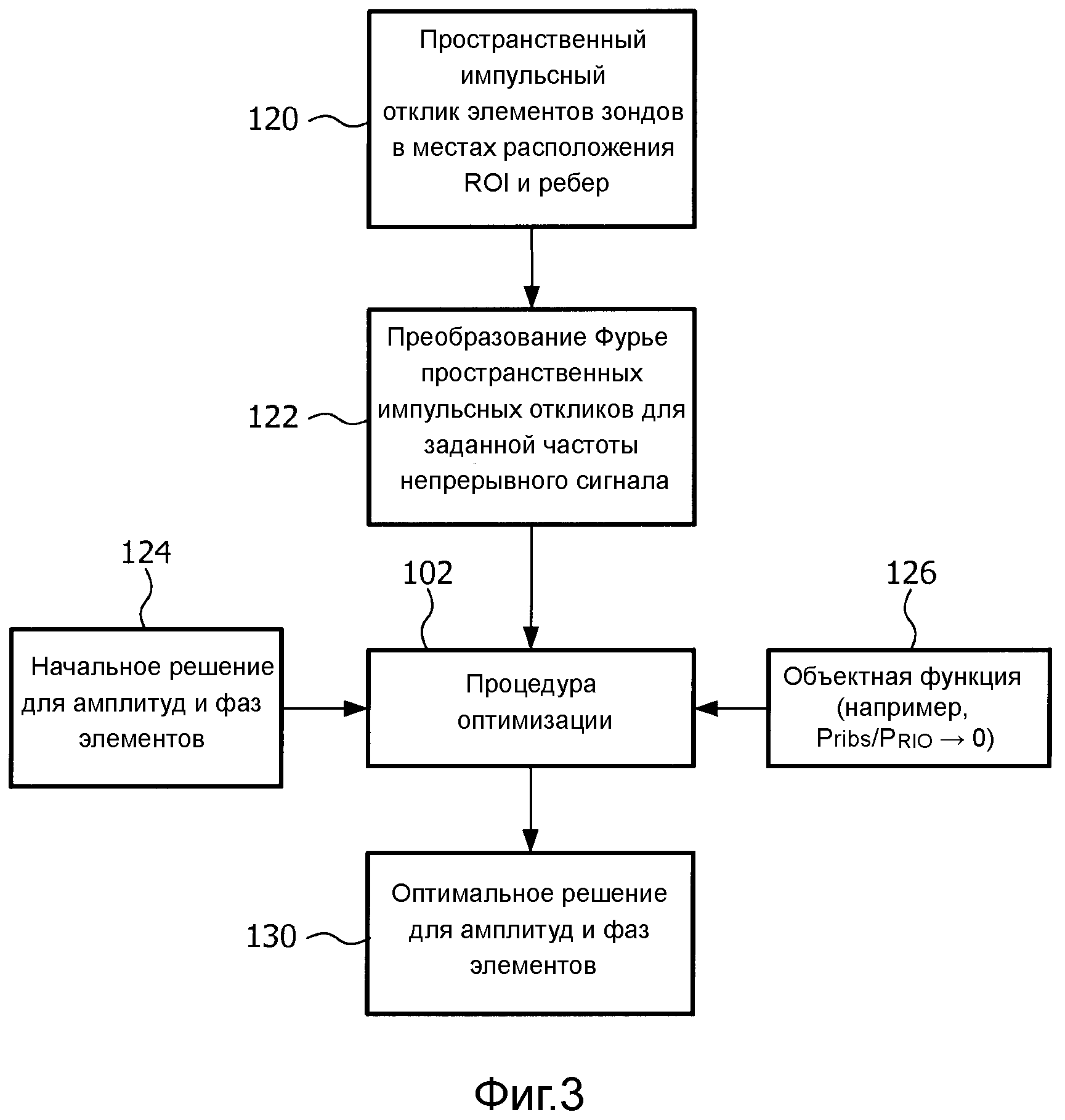
Фиг.3 - блок-схема последовательности выполнения операций процедуры оптимизации, основанной на технологии пространственного импульсного отклика.
Фиг.4 - пример матрицы преобразователей HIFU, расположенной рядом с кожей пациента, с множеством ребер, препятствующих передаче ультразвуковых волн к ROI, где должно делаться удаление.
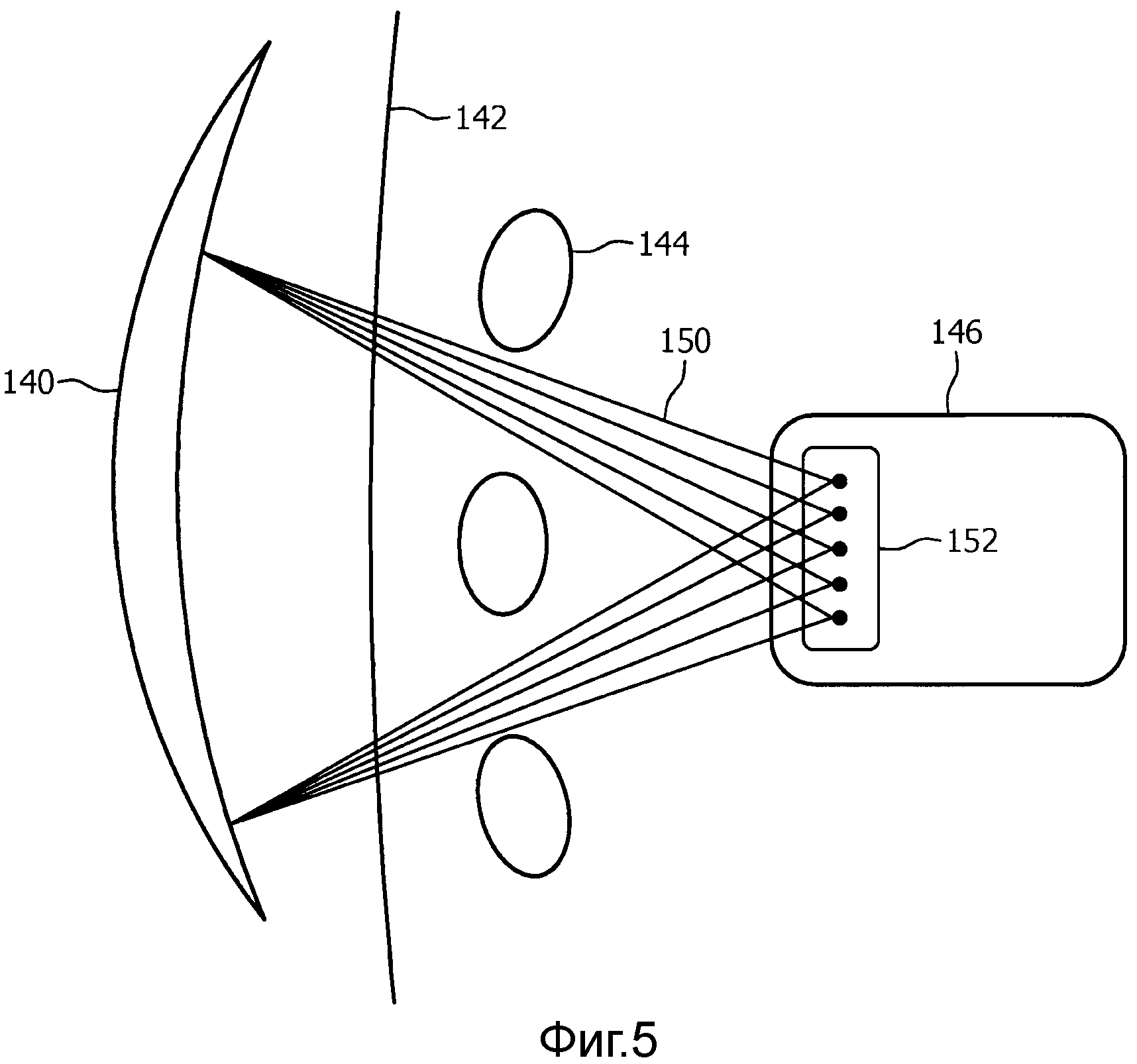
Фиг.5 - пример результатов наложения амплитуд и фаз для ультразвуковых сигналов или лучей так, чтобы многочисленные зоны ROI могли быть удалены одновременно по мере того, как матрица HIFU осуществляет передачу ультразвуковых волн через кожу пациента и мимо ребер, минимизируя общее время терапии.
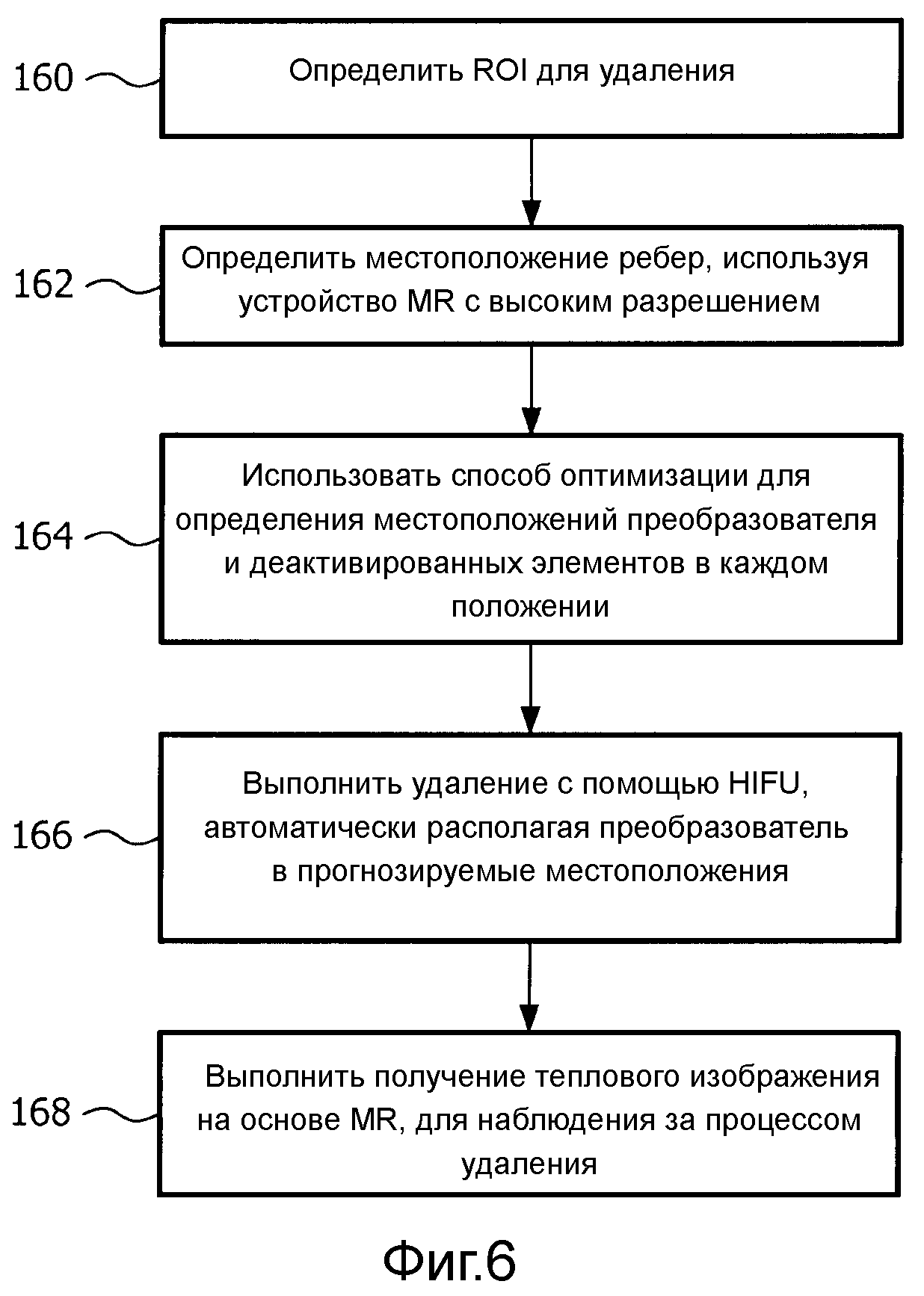
Фиг.6 - способ оптимизации расположения преобразователя HIFU во время использующих межреберные пространства процедур удаления ткани, таких как удаление печени, направляемых на основе MR.
Фиг.7 - способ оптимизации расположения преобразователя HIFU.
Фиг.8 - концептуальное расположение с матрицей HIFU, ребрами и ROI для заданного положения матрицы.
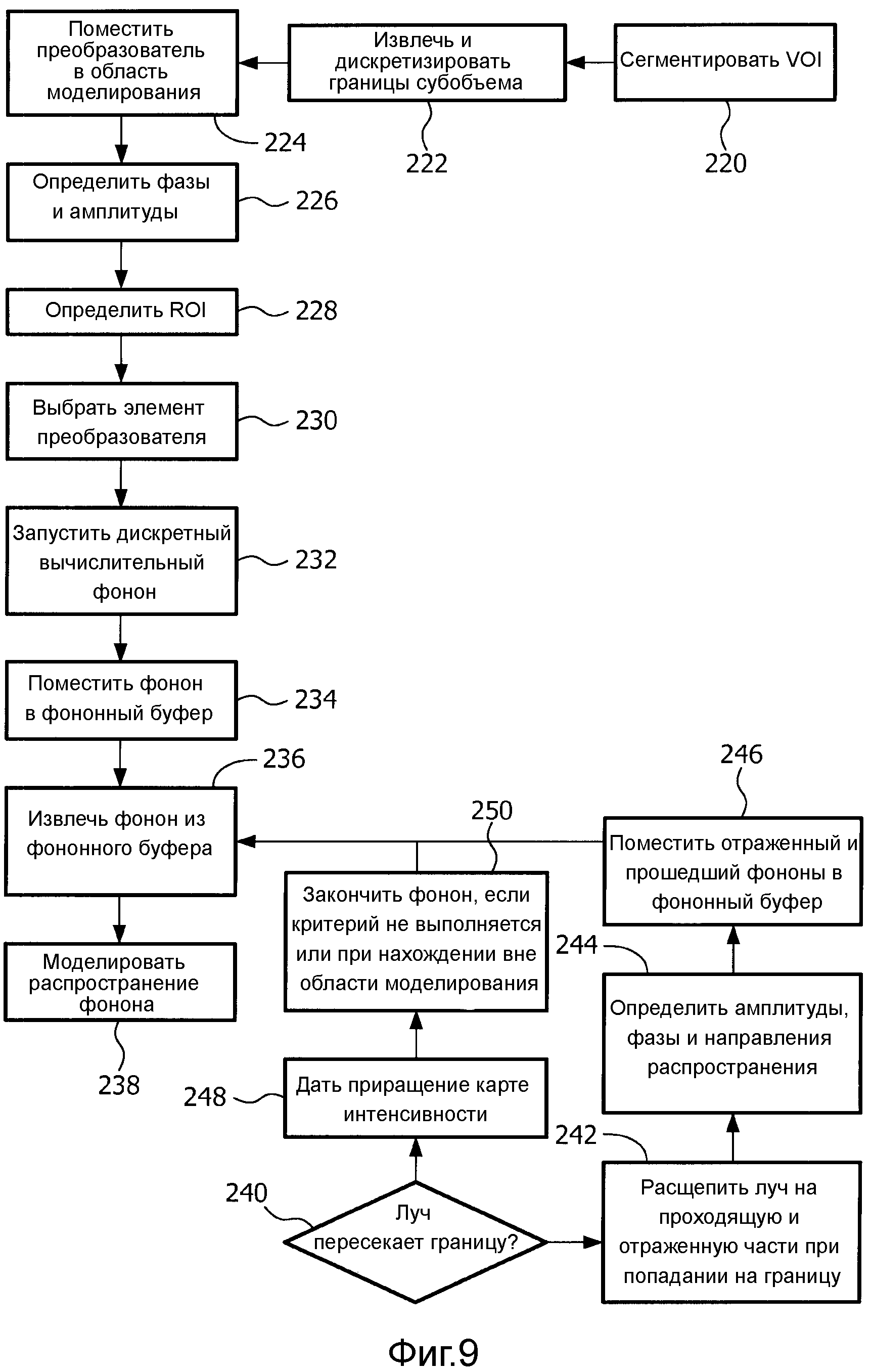
Фиг.9 - способ выполнения стохастической акустической моделирования в соответствии с одним или более описанными здесь аспектами.
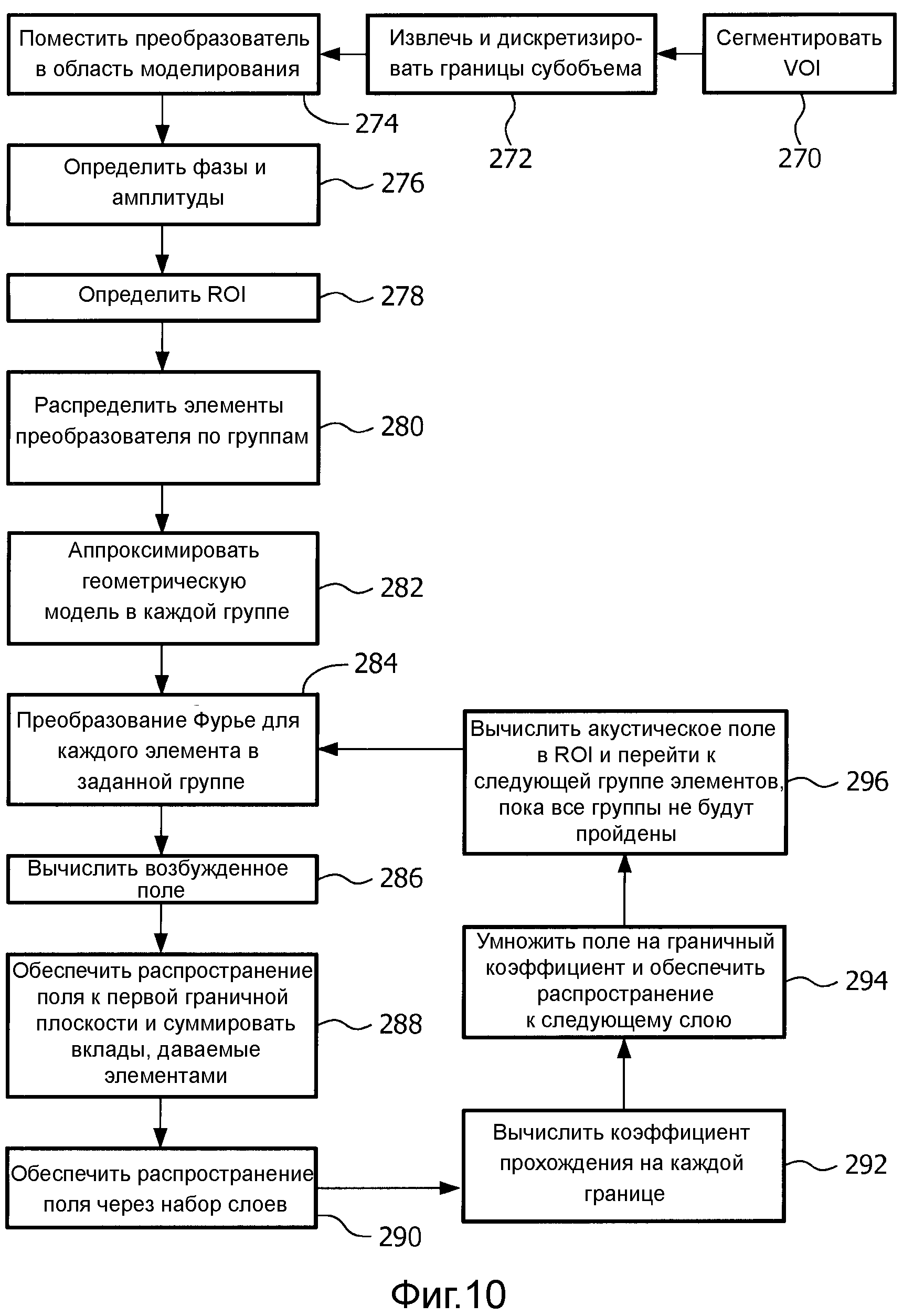
Фиг.10 - способ выполнения акустического моделирования с планарной аппроксимацией в соответствии с одним или более описанными здесь вариантами.
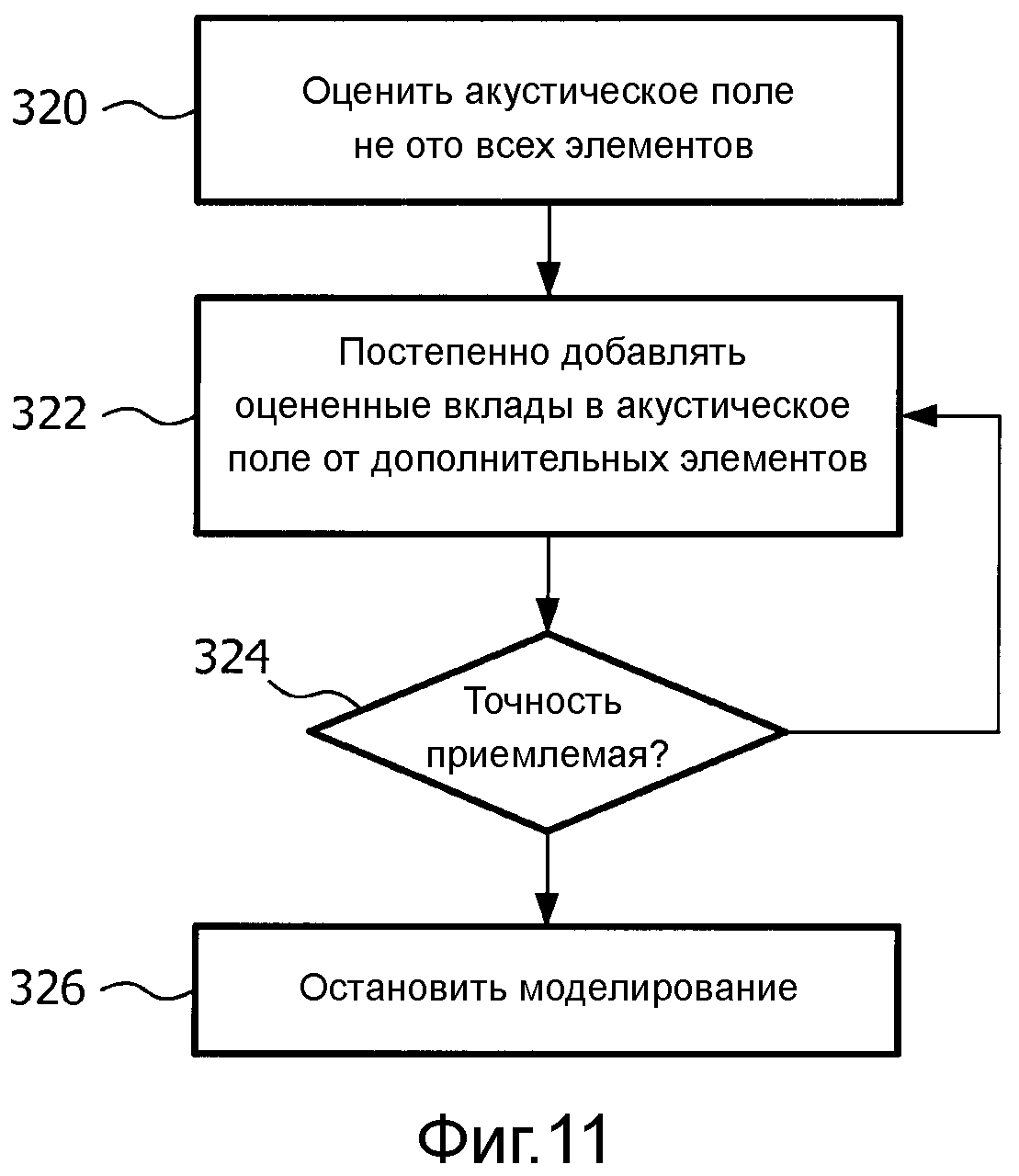
Фиг.11 - способ оценки вкладов субнаборов всех элементов преобразователя в соответствии с одним или более описанными здесь аспектами.
Системы и способы раскрыты здесь для того, чтобы оптимизировать выбор параметров передачи и положения преобразователя HIFU во время использующих межреберные пространства процедур удаления ткани, таких как удаление печени, направляемых на основе MR. Процедура оптимизации учитывает положение, геометрию и акустические параметры преобразователей HIFU. Она также учитывает размер и положение интересующей области (ROI) для удаления, а также места расположения ребер в трехмерном пространстве. Места расположения ребер определяются посредством сегментации MR-данных высокого разрешения. Процедура оптимизации дает в результате амплитуду и фазу для каждого элемента преобразователя, а также ряд расположений преобразователя с пятью степенями свободы (три размерности плюс шаг и отклонение) вместе с соответствующим перечнем деактивированных элементов в каждом положении. Амплитуды и фазы гарантируют максимальный вклад теплоты в ROI и минимальный на ребрах. Следует заметить, что нет никакого прямого отключения элемента, скорее имеют место оптимальные амплитуды и фазы, применяемые ко всем элементам преобразователя. Кроме того, процедура оптимизации приводит к наложению результатов для амплитуд и фаз, что приводит к удалению множества зон ROI одновременно, минимизируя общее время терапии.
В другом варианте осуществления каждое положение преобразователя ассоциировано с заданным временем и энергией экспонирования HIFU таким образом, что после обработки ультразвуком со всех положений вся ROI будет удалена. Положения преобразователя могут сортироваться в нисходящем порядке их покрытия ROI так, чтобы обработка начиналась из положения с наилучшим покрытием. В другом варианте конструкции нагрев в поверхностных слоях кожи может быть минимизирован, сортируя положения преобразователей таким образом, что существует минимальное перекрытие между следующими друг за другом зонами активных апертур.
Со ссылкой на фиг.1 показан инструмент 10 планирования, который облегчает оптимизацию фазы, амплитуды, положения и т.д. элемента преобразователя и выполняющий быстрые акустические моделирования на месте во время планирования ультразвуковой обработки. Инструмент 10 содержит процессор 12, который выполняет исполняемые компьютером команды, и память или считываемый компьютером носитель 14, который хранит исполняемые компьютером команды для выполнения описанных здесь различных функций, способов и/или алгоритмов. В одном варианте осуществления процессор 12 содержит архитектуру параллельной обработки. Инструмент дополнительно содержит интерфейс 16 пользователя (UI) (например, монитор, компьютерный терминал, автоматизированное рабочее место, и т.д.), через который информация предоставляется и принимается от пользователя или оператора. Инструмент соединен с устройством 18 сфокусированного ультразвука высокой интенсивности (HIFU) и магнитно-резонансным (MR) сканером 20.
Память содержит данные 22 о преобразователе HIFU или информацию, содержащую положение, геометрию и акустические параметры элемента преобразователя. Данные 24 ROI и данные 26 препятствий предоставляются MR-сканером и также сохраняются в памяти. Данные ROI описывают размер в трех измерениях и форму интересующей области (например, цель для удаления), в то время как данные препятствия описывают положение или расположение и форму препятствия (например, ребро или другая кость) между элементами преобразователя и ROI. Устройство HIFU также предоставляет информацию 28 о фазе и амплитуде элемента преобразователя, которая хранится в памяти. Процессор анализирует информацию пространственного импульсного отклика (например, от зондов, связанную с ROI и препятствием) и выполняет алгоритм 30 преобразования Фурье для заданной частоты непрерывного сигнала, которая вводится в оптимизатор 32 фазы и амплитуды (например, исполняемые компьютером команды, которые выполняются процессором 12). Процессор также создает начальное решение для амплитуды и фазы, с которыми каждый элемент преобразователя должен вести передачу, и объектную функцию, которая вводится в оптимизатор фазы и амплитуды, чтобы затем создать оптимальное решение для фазы и амплитуды каждого преобразователя, для удаления ROI, минимизируя теплопередачу к окружающей ткани и/или препятствию(-ям). Дополнительно, в памяти сохраняются результаты 34 наложения, которые создаются процессором 12 для наложения амплитуд и фаз многочисленных элементов, чтобы облегчить одновременное удаление множественных зон ROI. Эти аспекты ниже описаны более подробно со ссылкой на фиг.2-5.
Память также содержит оптимизатор 36 положения (например, набор исполняемых компьютером команд и т.п.), который принимает данные 22 преобразователя, связанные с положением каждого элемента преобразователя вдоль поверхности пациента и относительно ROI и любого препятствия. Оптимизатор положения, когда выполняется процессором 12, деактивирует элементы преобразователя, имеющие линию визирования, проходящую через препятствие на пути к ROI. Таким образом, только элементы с линией визирования, не имеющей препятствий на пути к ROI, остаются активными и осуществляют передачу во время удаления. Эти аспекты описаны ниже дополнительно со ссылкой на фиг.6-8.
В соответствии с другим вариантом осуществления, память содержит блок 38 моделирования удаления на месте (например, исполняемые компьютером команды, исполняемые процессором 12), который выполняет быстрые акустические моделирования во время планирования обработки на месте, используя акустическую модель 40 акустической траектории анатомии пациента во время моделирования удаления. Три соответствующих алгоритма описаны здесь для выполнения моделирования на месте, в том числе, стохастический алгоритм 42 моделирования, алгоритм 44 аппроксимации и алгоритм 46 оценки. Стохастический алгоритм моделирования использует фононный буфер 48, который хранит фононную информацию во время процедуры моделирования. Эти признаки описаны более подробно со ссылкой на фиг.9-11.
В одном варианте осуществления модель акустической траектории содержит водяной резервуар, миларовую фольгу, гелевую подушку и анатомию пациента. Акустические параметры, обычно скорость распространения волны, затухание волны и плотность ткани, определяются для каждой точки объема моделирования. Моделирование выполняется, сегментируя объем на однородные субобъемы и определяя набор акустических параметров для каждого субобъема. В одном варианте осуществления пользователь предоставляет информацию о сегментации вручную, основываясь на планируемых изображениях (например, созданных, используя MR-сканер 20). Например, для обработки фиброзных опухолей могут быть полезны местоположение и приблизительная толщина подкожной жировой прослойки. В другом варианте осуществления используются алгоритмы автоматической сегментации (не показаны), чтобы осуществлять сегментацию из планируемых изображений, получаемых на месте.
В других вариантах осуществления, таких как в применениях, где качество изображений, получаемых посредством MRI, или требования к вычислениям делают автоматическую сегментацию на месте невыполнимой, сегментация может делаться автономно, основываясь на ранее созданных изображениях. Дополнительно, в качестве основы для сегментации могут использоваться способы получения изображений, отличные от MRI.
Чтобы завершить сегментацию, каждый субобъем снабжается конкретными акустическими параметрами. В одном варианте осуществления пользователь вводит значения параметров, используя UI 16. Значения могут быть определены, основываясь на ткани из таблицы типичных значений.
Фиг.2-5 и сопутствующее описание относятся к оптимизации параметров передачи преобразователя, чтобы использовать межреберное пространство во время удаления ткани, направляемого на основе MR.
На фиг.2 представлена блок-схема последовательности выполнения операций оптимизации параметров передачи (например, амплитуды и фазы), соответствующих заданному положению, геометрии и акустическим параметрам преобразователя HIFU, в то же время учитывая размер и положение ROI для удаления и расположение ребер. Кроме того, процесс оптимизации, показанный на фиг.2, оптимизирует общее время терапии, обеспечивая амплитуды и фазы, облегчающие одновременное удаление множества зон ROI. На этапе 100 принимаются несколько типов входных данных (например, процессором, выполняющим оптимизацию). Входная информация содержит положение, геометрию и акустические параметры преобразователя HIFU, а также как размер и положение ROI для удаления. Входная информация также содержит трехмерную информацию о положении ребер.
На этапе 102 выполняется оптимизация, содержащая оптимизацию амплитуды и фазы для каждого из множества элементов преобразователя. Оптимизация дополнительно содержит создание и/или оптимизацию наложения результатов для амплитуд и фаз для множества зон ROI, позволяя одновременное удаление множества зон ROI и сокращая продолжительность процедуры удаления. Этот этап дополнительно описывается со ссылкой на фиг.3. На этапе 104 выполняется процедура удаления, используя оптимизированную информацию об амплитудах и фазах и результаты наложения.
Способ, показанный на фиг.2, таким образом, представляет технологию оптимизации для выбора параметров передачи преобразователя HIFU во время процедур удаления ткани, направляемых на основе MR, таких как удаление печени, которые используют межреберные пространства. Процедура оптимизации дает в результате амплитуду и фазу для каждого элемента преобразователя HIFU. Оптимизированные амплитуды и фазы обеспечивают максимальный вклад теплоты на ROI и минимальный вклад теплоты на ребра. Следует отметить, что в одном варианте осуществления не должно быть никакого прямого отключения элемента, а скорее ко всем элементам преобразователя могут применяться оптимальные амплитуды и фазы.
На фиг.3 представлена блок-схема последовательности выполнения операций для процедуры оптимизации, основанной на технологии пространственного импульсного отклика. На этапе 120 пространственные импульсные отклики вычисляются для элементов зонда преобразователя на сетке точек в ROI и в местах расположения ребер. Для ясности, на фиг.4 (ниже) показан преобразователь HIFU, положения ребер и ROI для удаления. На этапе 122 решение для непрерывной волны (CW) получается, выполняя преобразование Фурье для импульсных откликов при заданной частоте CW (для нижних MI предполагается акустическое линейное распространение). На этапе 124 начальное решение для амплитуд и фаз элементов обеспечивается для процедуры 102 оптимизации. Например, для преобразователя с 128 элементами предоставляются 256 значений. На этапе 126 по отношению акустического давления в ROI и акустического давления на уровне ребер определяется объектная функция. Используя входную информацию из этапов 122, 124 и 126, выполняется функция 102 оптимизации, чтобы минимизировать объектную функцию. На этапе 128 обеспечивается оптимальное решение для амплитуд и фаз элементов. Следует понимать, что могут использоваться подобные подходы, разработанные для частотной области, такие как использование обратной связи от ROI к элементам апертуры преобразователя и учет положения ребра.
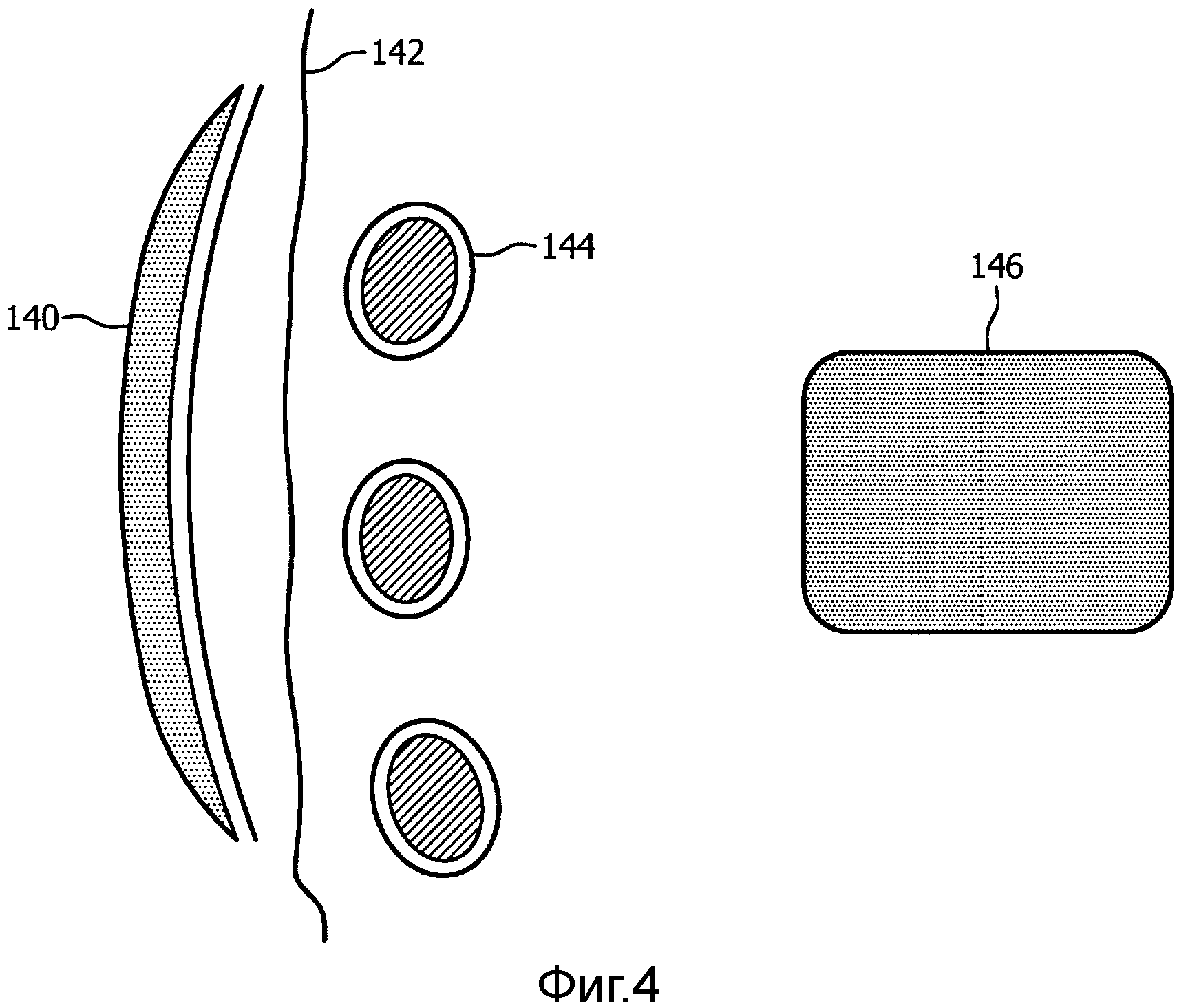
На фиг.4 показан пример матрицы 140 преобразователя HIFU, расположенной рядом с кожей 142 пациента, с множеством ребер 144, препятствующих прохождению ультразвуковых волн к ROI 146, которая должна быть удалена.
На фиг.5 показан пример наложения результатов для амплитуд и фаз ультразвуковых сигналов или лучей 150 так, чтобы множественные зоны 152 в ROI 146 могли удаляться одновременно по мере того, как матрица 140 HIFU передает ультразвуковые волны через кожу пациента 142 и ребра 144, минимизируя общее время терапии. На фиг.5 показано, как множественные зоны ROI могут учитываться при оптимизации.
Последующее описание представлено в качестве примера для показа дополнительных подробностей работы модуля оптимизации или функции 102 и сопутствующих систем и способов, показанных на фиг.1-5. Матрица 140 HIFU имеет элементы передатчика (не показаны), которые обозначаются номером n. Каждый из них доставляет мощность I n, часть которой рассеивается в ROI. Эта часть пропорциональна интегралу по объему акустической интенсивности, коэффициенту локального поглощения и ослаблению волны перед достижением ROI. Локальная интенсивность в ROI, создаваемая волной, равна I n. Определяется значение EROI, пропорциональное энергии, поданной за заданное время для единицы поглощения:

E
ROI, таким образом, представляет полную энергию в ROI, как показано на фиг.5. Число n соответствует каждому из элементов преобразователя, и I
n означает среднюю акустическую интенсивность в ROI, соответствующую каждому из элементов преобразователя. Интеграл по объему ROI учитывает фазу (φn), соответствующую каждому из элементов преобразователя, волновое число k и относительное расстояние | | точки в ROI относительно естественного фокуса преобразователя.
| точки в ROI относительно естественного фокуса преобразователя.
Для случая, когда все I
n и φn (то есть, для всех преобразователей), соответственно, равны, сферическая волна определяется как падающая через конусное отверстие, определенное отверстием преобразователя. Если фокус сдвинут к новому положению  и в то же самое время φn каждого преобразователя регулируется, уравнение имеет ту же самую форму. Это соответствует хорошо известному эффекту электронного перемещения фокуса матрицы. Для каждого положения фокуса существует соответствующий набор значений для элементов матрицы, определяющих волновую функцию для волны, доставляющей энергию к этой точке пространства.
и в то же самое время φn каждого преобразователя регулируется, уравнение имеет ту же самую форму. Это соответствует хорошо известному эффекту электронного перемещения фокуса матрицы. Для каждого положения фокуса существует соответствующий набор значений для элементов матрицы, определяющих волновую функцию для волны, доставляющей энергию к этой точке пространства.
При использовании системы HIFU для лечения ультразвуковая энергия прикладывается на несколько минут. В течение этого времени, теплота распространяется от обрабатываемой точки или пятна.
Поэтому, нет необходимости прикладывать теплоту повсеместно равномерно: скорее растр точек может выбираться на некотором расстоянии друг от друга, которое больше чем фокальное пятно. В результате, эффекты интерференции между пятнами могут управляться, чтобы стать достаточно малой величиной, которой можно пренебречь, такой, что:

Пока обрабатываемое пятно приемлемо близко к естественному фокусу преобразователя, в пределах ширины луча индивидуальных элементов амплитуда Anm независима от m. Для случая неперекрытого препятствием преобразователя фазы выбираются так, чтобы делать φnm =k| | + αm. E
ROI теперь становится суммой по номерам энергии элементов объема, как ожидалось. Энергия становится независимой от угла α, что, как будет показано, может использоваться для оптимизации в более сложном случае препятствий в ближней зоне, например, за счет ребер.
| + αm. E
ROI теперь становится суммой по номерам энергии элементов объема, как ожидалось. Энергия становится независимой от угла α, что, как будет показано, может использоваться для оптимизации в более сложном случае препятствий в ближней зоне, например, за счет ребер.
Другим параметром, который может использоваться для оптимизации ближней зоны, является волновое число k, которое влияет на длину волны и поэтому также на дифракционную структуру волн, k оптимизируется в пределах ширины полосы преобразователя HIFU, которая составляет 0,5 МГц в соответствии с одним вариантом осуществления.
Для случая препятствия энергетическая функция записывается следующим образом:

Затем, E RIE (энергия, поглощенная преграждающим ребром, минимизируется). Выбирается соответствующая система элементов объема, охватывающая ребра, для которых вычисляются амплитуды B nm и фазы β nm. Дополнительно, энергетическая функция, соответствующая межреберным пространствам, может быть записана следующим образом:

При минимизации E RIE межреберная энергия E ICST максимизируется. Подобно E RIE, выбирается соответствующая система элементов объема, охватывающая пространства между ребрами для которых вычисляются амплитуды C nm и фазы γ nm.
Объектная функция, упомянутая выше, становится максимизацией E ROI и в то же самое время минимизацией E RIE и максимизацией E ICST. Было показано, что соответствующие собственные векторы для численной оптимизации представляются, задавая одну и ту же амплитуду всем элементам преобразователя. Все функции соответствуют фокусировке поля, но в разных местах. Фазы для матрицы вычисляются, исходя из упомянутых местоположений, но содержат общую неопределенную фазу. Собственные функции, таким образом, являются полностью вырожденными в том, что энергия независима как от положения фокальной точки, так и от общей фазы.
Система может теперь быть оптимизирована, выражая нагревание в области ребер (в ребрах и в межреберном пространстве) через использование упомянутых собственных функций: в области ребер их вырождение будет повышаться и, изменяя собственные значения так, чтобы результирующие амплитуды и фазы могли использоваться для одновременного удаления множественных зон ROI, общее время терапии минимизируется.
Таким способом, при процедурах HIFU, направляемых на основе MR, которые используют межреберные пространства, оптимальный набор параметров передачи (амплитуды и фазы) создается в соответствии с заданным положением, геометрией и акустическими параметрами преобразователя HIFU и также учитывает для удаления размер ROI и положение и местоположение ребер. Результаты для амплитуды и фазы могут также накладываться друг на друга так, чтобы множество зон ROI могли быть удалены одновременно, минимизируя общее время терапии.
Фиг.6-8 и сопутствующее описание связаны с оптимизацией положения преобразователя и деактивацией элемента для использования межреберного пространства во время удаления ткани, направляемого на основе MR. Процедура оптимизации учитывает геометрию и акустические параметры преобразователя HIFU, размер и положение ROI для удаления, а также местоположение ребер в трехмерном пространстве. Оптимизация также учитывает дыхательное движение органа. Данные по местам расположения ребер могут обеспечиваться посредством сегментации MR-данных с высоким разрешением. Выходным результатом процедуры оптимизации является ряд местоположений преобразователя с пятью степенями свободы (например, 3 размерности плюс шаг и отклонение) вместе с соответствующим перечнем деактивированных элементов преобразователя для каждого положения. Каждое положение преобразователя ассоциировано с данными временем и энергией экспонирования HIFU таким образом, что после ультразвуковой обработки из всех положений вся ROI удаляется. В одном варианте осуществления положения преобразователя, получаемые при выполнении процедуры оптимизации, сортируются в нисходящем порядке их покрытия ROI так, чтобы обработка начиналась из положения с лучшим покрытием. В другом варианте осуществления нагревание в поверхностных слоях кожи минимизируется, сортируя положения преобразователя таким образом, что между соседними зонами охвата активных апертур присутствует минимальное перекрытие.
На фиг.6 показан способ оптимизации расположения преобразователя HIFU во время процедур удаления ткани, направляемых на основе MR, использующих межреберные пространства, таких как удаление печени. На этапе 160 ROI для удаления определяется пользователем. На этапе 162 получение MR-изображений с высоким разрешением используется для сегментации ребер. На этапе 164 информация о ROI, положение ребер и геометрия и акустические параметры преобразователя используются процедурой или алгоритмом оптимизации (например, набором исполняемых компьютером команд), давая в результате ряд местоположений преобразователя вместе с соответствующим перечнем деактивированных элементов в каждом местоположении. Места расположения преобразователя указываются как параметры с пятью степенями свободы (например, три размерности плюс шаг и отклонение), и каждое положение преобразователя ассоциируется с заданным временем и энергией экспонирования HIFU. На этапе 166 обработка ультразвуком из всех положений выполняется так, чтобы вся ROI была удалена. На этапе 168 получение теплового MR-изображения выполняется во время обработки ультразвуком, чтобы наблюдать за процессом удаления.
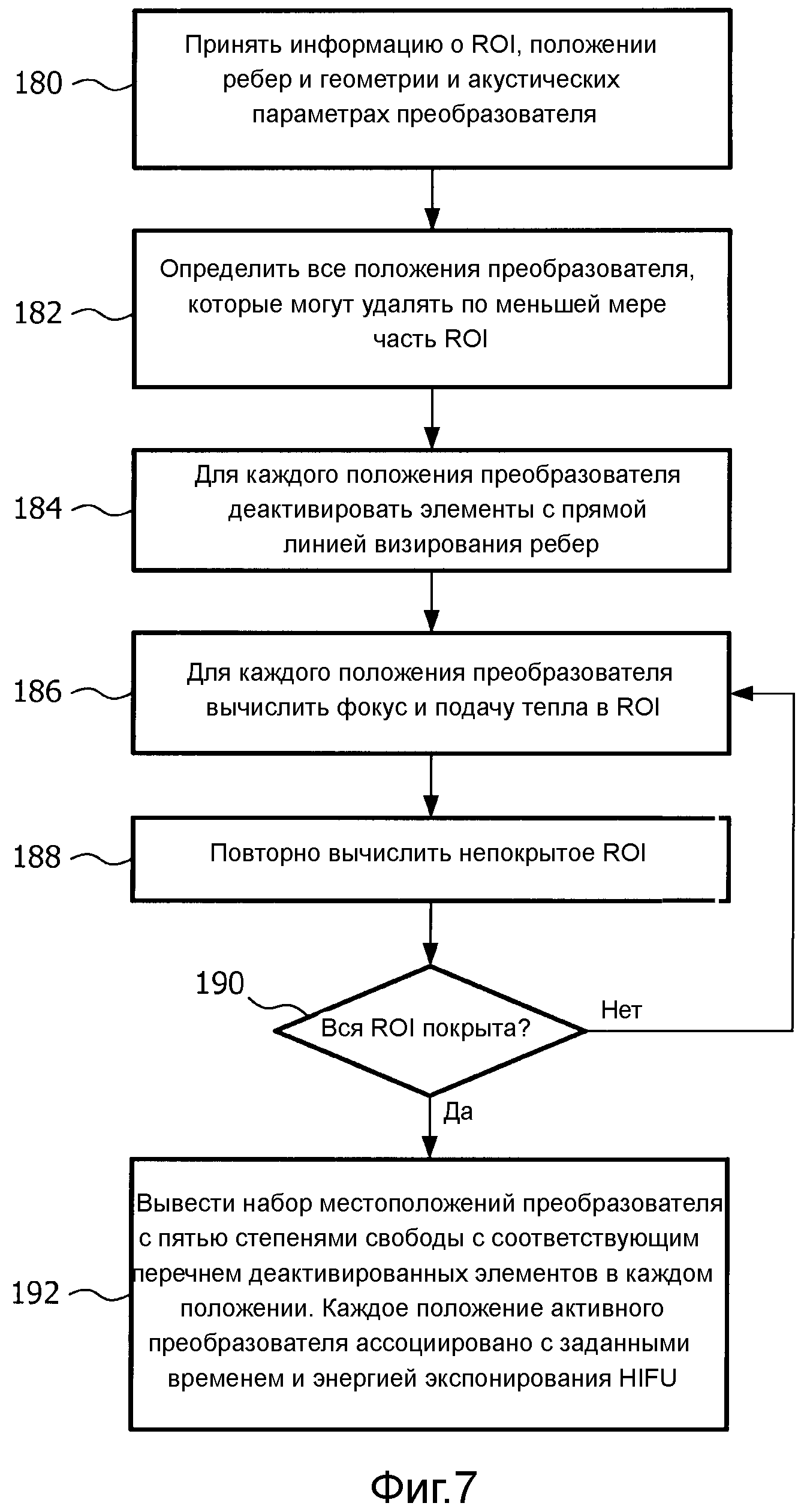
На фиг.7 показан способ оптимизации расположения преобразователя HIFU, как это происходит на этапе 164 на фиг.6. На этапе 180 информация, связанная с геометрией и акустическими параметрами преобразователя HIFU, размером и положением ROI для удаления и местами расположения ребер, принимается в качестве входных данных для алгоритма оптимизации. На этапе 182 все положения преобразователя, из которых могут излучаться ультразвуковые волны для выполнения удаления по меньшей мере части ROI, определяются, основываясь на теоретической акустической фокусировке и подаче тепла от преобразователя HIFU. На этапе 184 для каждого из положений преобразователя, определенных на этапе 182, деактивируются элементы с прямым попаданием на ребра. То есть, любое положение преобразователя, из которого ультразвуковая волна имеет линию визирования, проходящую через ребро к цели удаления, деактивируется.
На этапе 186 акустическая фокусировка и вклад тепла в ROI вычисляется для каждого положения преобразователя, определенного на этапе 182, отбрасывая в каждом случае элементы с линией визирования, проходящей через ребра. На этапе 188 выбирается положение преобразователя с наибольшим вкладом тепла в ROI. На этапе 190 делается определение в отношении того, покрывается ли вся ROI (то есть, будет ли вся ROI удалена посредством положений активных преобразователей). Если вся ROI покрыта, то оптимизация заканчивается и на этапе 192 ряд местоположений с активными преобразователями выводится с соответствующим перечнем деактивированных элементов для каждого положения. Каждое положение активного преобразователя ассоциировано с заданными временем и энергией экспонирования HIFU (то есть, дозой). Если покрывается не вся ROI, процедура оптимизации возвращается к этапу 186, чтобы выбрать положение преобразователя со следующим наибольшим вкладом тепла в оставшемся непокрытым ROI.
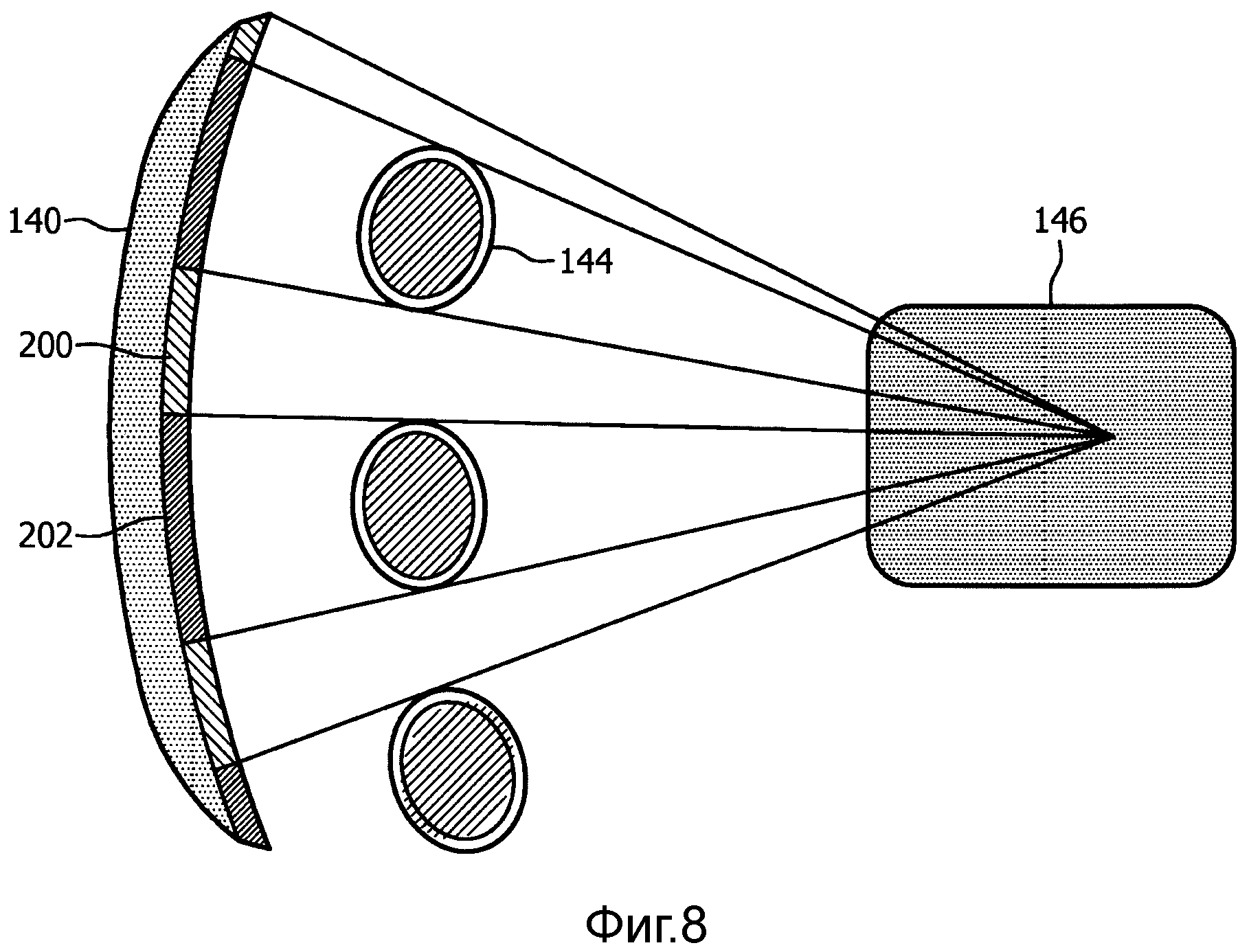
На фиг.8 представлено концептуальное расположение матрицы 140 HIFU, ребер 144 и ROI 146 для данного положения матрицы. Ребра избегают, деактивируя элементы с прямой линией визирования, проходящей по ребрам. Фокусировка и вклад тепла вычисляются для ROI, учитывая только активные элементы 200 без учета деактивированных элементов 202. Таким способом в процедурах HIFU, использующих межреберные пространства, направляемых на основе MR, априорно планируемая обработка выполняется, основываясь на размере ROI для удаления и положении, геометрии и акустических параметрах преобразователя и трехмерном положении ребер. Этот аспект смягчает потребность в ручном изменении положения матрицы преобразователя, основываясь на получении теплового изображения.
Фиг.9-11 и сопутствующее описание дополнительно уточняют различные варианты осуществления, связанные с оптимизацией обработки ультразвуком на месте посредством быстрых акустических моделирований. При терапии сфокусированным ультразвуком достигнутое распределение тепловой энергии и накопленная тепловая доза зависят от акустических свойств тканей на пути обработки ультразвуком. В соответствии с одним вариантом осуществления, быстрые акустические моделирования на месте с моделированной акустической траекторией обеспечиваются в качестве интерактивного инструмента для оптимизации обработки. Эти моделирования могут выполняться непосредственно перед обработкой, чтобы оптимизировать параметры обработки ультразвуком. Соответствующее, предназначенное для конкретного пациента моделирование акустической траектории улучшает определение местоположения и четкость фокусировки. Полагая, что скорость звука внутри различных тканей приблизительно известна, эти моделирования могут также использоваться для определения фазы для различных элементов преобразователя, чтобы достигнуть острого фокуса. Альтернативно, фаза элемента может интерактивно изменяться, пока качество фокуса не станет достаточным. Интерактивно взаимодействуя с инструментом, пользователь может оптимизировать расположение преобразователя и тепловую экспозицию, принимая во внимание другие факторы, такие как теплота, передаваемая в соседние органы.
На фиг.9-11 описаны три алгоритма, делающие возможными упомянутые выше функциональные возможности. Первый алгоритм использует стохастическое моделирование, чтобы получить приблизительные прогнозы, которые улучшаются в соответствии со временем моделирования. Второй алгоритм позволяет производить быстрые вычисления, аппроксимируя акустическую траекторию как набор плоских поверхностей раздела. Третий алгоритм оценивает акустическое поле для субнабора элементов преобразователя.
На фиг.9 представлен способ выполнения стохастического акустического моделирования, в соответствии с одним или более аспектами, описанными здесь. В соответствии со способом, который может храниться на считываемом компьютером носителе как набор исполняемых компьютером команд, стохастическое моделирование используется, чтобы быстро формировать постепенно улучшающуюся оценку акустического поля. Дискретные акустические лучи беспорядочно испускаются элементами преобразователей матрицы HIFU, и способы слежения за лучами используются для моделирования их распространения к ROI. Полученная оценка может быть сначала приближенной и улучшается со временем по мере того, как моделируются все больше лучей. Пользователь может отслеживать оценку в режиме реального времени и прервать моделирование, когда готов принять или отклонить настройку обработки ультразвуком.
Соответственно, на этапе 220 геометрическая модель интересующего объема (VOI) сегментируется с акустическими параметрами, определяемыми для каждого субобъема. Граничные поверхности между субобъемами извлечены и дискретизируются в пригодной для вычислений структуре данных на этапе 222. То есть, каждый субобъем определяется его соответствующими акустическими параметрами и ограничивающими граничными поверхностями. На этапе 224 преобразователь помещается в область моделирования. Фазы и амплитуды индивидуальных элементов преобразователя определяются на этапе 226. Интересующие области внутри VOI определяются на этапе 228.
Элемент преобразователя выбирается на этапе 230, основываясь на заданном алгоритме. В одном варианте осуществления все элементы систематически анализируются в заданном порядке и выбор делается стохастически, основываясь на относительной амплитуде элемента. На этапе 232 дискретный вычислительный фонон запускается из выбранного элемента преобразователя. Направление фонона выбирается случайным или псевдослучайным образом в соответствии с заданным распределением направленности. В одном варианте осуществления распределение основано на структуре направленности элемента. С фононом ассоциированы амплитуда и фаза, которые инициируются амплитудой и фазой элемента преобразователя. На этапе 234 фонон помещается в фононный буфер.
На этапе 236 фонон извлекается от фононного буфера. Если буфер пуст, способ возвращается к этапу 220. На этапе 238 распространение фонона моделируется с помощью способов слежения за лучом. На этапе 240 определяется, пересекает ли луч границу какого-либо субобъема или интересующего объема.
Фаза фонона распространяется в соответствии с пройденным акустическим расстоянием. При пересечении границы на этапе 242 луч расщепляется на отраженную часть и проходящую часть. Амплитуды, фазы и направления распространения определяются на этапе 244, основываясь на угле падения и физических параметрах субобъемов на разных сторонах границы. В соответствии с одним вариантом осуществления, направления распространения определяются в соответствии с законом Снелля. В другом варианте осуществления направления определяются из распределения направленности. На этапе 246 оба (например, отраженный и проходящий) фонона помещаются в буфер моделирования фононов и способ возвращается к этапу 236.
Если определение на этапе 240 указывает, что траектория фонона пересекает интересующий объем, карта акустической интенсивности объема, соответственно, увеличивается на этапе 248. На этапе 250 фонон прекращается, если амплитуда фонона становится ниже некоторого критерия или, если траектория фонона выводит его за пределы области моделирования, способ возвращается к этапу 236. В одном варианте осуществления фононный буфер организован таким образом, что фононы с самыми низкими амплитудами выбираются первыми.
На фиг.10 показан способ выполнения акустического моделирования с планарной аппроксимацией в соответствии с одним или более описанными здесь аспектами. В соответствии со способом, который может храниться на считываемом компьютером носителе в виде набора исполняемых компьютером команд, акустическая траектория аппроксимируется как состоящая из набора однородных материалов, заключенных между плоскими поверхностями раздела. Максимальная скорость моделирования достигается, если одна и та же модель геометрии используется для всех элементов преобразователя. Для повышенной точности элементы преобразователя могут быть разделены на группы элементов, каждая из которых имеет свою собственную аппроксимацию геометрии.
На этапе 270 геометрическая модель VOI сегментируется с акустическими параметрами, определяемыми для каждого субобъема. Граничные поверхности между субобъемами на этапе 272 извлекаются и дискретизируются в пригодную для вычислений структуру данных. То есть, каждый субобъем определяется его соответствующими акустическими параметрами и ограничивающими граничными поверхностями. На этапе 274 преобразователь помещается в область моделирования. На этапе 276 определяются фазы и амплитуды индивидуальных элементов преобразователя. На этапе 278 определяются интересующие области в VOI.
На этапе 280 элементы преобразователя распределяются по группам. На этапе 282 для каждой группы формируется приближенная геометрическая модель, в которой граничные поверхности аппроксимируются плоскостями. Все элементы преобразователя, принадлежащие группе, прослеживаются во время этого этапа так, чтобы приближенная геометрическая модель была сформирована для каждого элемента преобразователя. На этапе 284 для каждого элемента в естественной плоскости этого элемента вычисляется преобразование Фурье для исходного распределения элемента. На этапе 286 вычисляется соответствующее возбужденное поле. Поле распространяется к первой граничной плоскости и вклады от всех элементов суммируются на этапе 288. Первая плоскость теперь содержит поле, возбужденное группой элементов преобразователя.
На этапе 290 поле распространяется через набор слоев ткани. В соответствии с одним вариантом осуществления, если акустические отражения слабые, что характерно для биологических тканей, многократно отраженные поля могут игнорироваться. В этом случае, отраженные части поля игнорируются и прослеживается только проходящая часть поля. На каждой границе на этапе 292 коэффициент пропускания вычисляется для каждого подвергнутого преобразованию Фурье поля, основываясь на волновом векторе компонента и параметрах материалов по разные стороны границы. На этапе 294 поле умножается на коэффициент пропускания и распространяется к следующему слою ткани. Акустическое поле вычисляется в интересующих областях и на этапе 296 передается следующей группе элементов преобразователя.
В альтернативном варианте осуществления, если отражения должны приниматься во внимание, но они не очень сильны, можно обратиться к итерационной схеме. С каждой границей ассоциируется проходящее и отраженное поле. Первоначально, первая граница содержит возбужденное поле от группы элементов преобразователя, а все другие области пусты. Области обновляются, вычисляя на каждой границе отраженную и проходящую компоненты поля и распространяя их на соседние границы. Для слабых отражений итерация быстро сходится.
Алгоритм, показанный на фиг.10, таким образом, использует быстрое преобразование Фурье для распространения акустического поля от одной поверхности к другой. Чтобы проиллюстрировать это, можно предположить, что существуют две поверхности, каждая из которых дискретизирована в N геометрических примитивов. Тогда распространение поля от поверхности 1 к поверхности 2 в пространственной области содержит 0(N2) вычислений. Однако, если две поверхности являются плоскими, параллельными и равномерно дискретизированными, преобразование Фурье применяется к полю на поверхности 1 с 0(Nlog2N) операций, прошедшее преобразование Фурье поле распространяется на поверхность 2 с 0(N) операций, и преобразуется обратно при 0(Nlog2N) операций. Кроме того, если существуют несколько слоев, нет никакой необходимости выполнять преобразование Фурье в промежуточных слоях.
Требование, чтобы все поверхности быть плоскими и параллельными, является ограничительным, но может быть допустимо для некоторых применений, например, чтобы скорректировать отклонение, даваемое жиром, при лечении фибромы матки. Однако, требование параллельности может быть несколько смягчено. Например, прошедшее преобразование Фурье поле может распространяться в несколько наклонной плоскости с минимальными вычислительными затратами. При преобразовании может быть потеряна часть акустического спектра, но эта часть составляет волны, распространяющиеся в стороны, и для рассматриваемого применения обычно малоинтересна. Что касается ровности, шаблоны направленности индивидуальных элементов преобразователя имеют тенденцию быть узкими. Следовательно, по меньшей мере на уровне одиночного элемента преобразователя во многих применениях геометрия может быть аппроксимирована как набор слоев, ограниченных плоскими, хотя и не обязательно параллельными, границами.
В одном варианте осуществления алгоритм, показанный на фиг.10, может модифицироваться таким образом, что первый или последний слой могут быть сильно отражающими. Если геометрия позволяет аппроксимацию, где все плоскости параллельны, многократные отражения могут быть учтены в одной итерации. Акустическое поле вычисляется в интересующих объемах и продолжается в следующей группе элементов преобразователя.
В другом варианте осуществления пространственно зависимые коэффициент отражения и коэффициент пропускания ассоциированы с любой границей. Например, кость может моделироваться, размещая границу в центре кости и указывая зону низкого пропускания через кость.
На фиг.11 представлен способ оценки вкладов, вносимых поднабором из всех элементов преобразователя в соответствии с одним или более аспектами, описанными здесь. На этапе 320 акустическое поле оценивается, исходя из малого субнабора элементов преобразователя. На этапе 322 оцененные вклады акустического поля от дополнительных элементов постепенно добавляются, чтобы улучшить оценку. Элементы выбираются явно равномерно распределенными по поверхности преобразователя, так чтобы промежуточное распределение интенсивности было репрезентативным для конечного распределения для всех элементов преобразователя. На этапе 324 делается определение в отношении того, была ли получена желаемая точность. Если желательная точность получена, на этапе 326 моделирование может быть прервано или остановлено. В противном случае, способ возвращается к этапу 322 для определения вкладов акустического поля, даваемых дополнительными элементами. Фазовый резонанс моделированных элементов может оцениваться, используя этот подход, и, таким образом, также качество фокуса.
Подход, показанный на фиг.11, может быть объединен с одним из подходов или с обоими подходами, показанными на фиг.9 и 10, или с любой другой процедурой моделирования. Выбираются соответствующие элементы, из которых можно моделировать результирующее распределение акустической интенсивности. Выбирая элементы, расположенные на относительно большом расстоянии друг от друга на поверхности преобразователя, распределение интенсивности, полученное для нескольких элементов, является репрезентативным для конечного распределения всех элементов преобразователя. Моделирование может затем быть прекращено в любой момент, как только пользователь удовлетворен точностью.
Новизна была описана со ссылкой на несколько вариантов осуществления. Другим специалистам после прочтения и понимания предшествующего подробного описания могут прийти в голову модификации и изменения. Подразумевается, что новизна рассматривается как содержащая все такие модификации и изменения, насколько они попадают в пределы объема приложенной формулы изобретения или ее эквивалентов.
Кухонное устройство
Спектральная компьютерная томография
Магнитная резонансная томография с расширенной зоной обзора
Картридж для анализов с помощью магнитных частиц
Одновременная основанная на модели сегментация объектов, удовлетворяющих заранее заданным пространственным соотношениям
Комбинация asg, катода и держателя для детектора фотонов
Система беспроводной передачи энергии
Устройство светоизлучающего диода
Система для рентгеновского обследования со встроенным приводным средством для выполнения поступательного и/или поворотного перемещений фокусного пятна, по меньшей мере, одного анода, испускающего рентгеновское излучение, относительно неподвижного опорного положения и со средством для компенсации происходящих в результате параллельного и/или углового сдвигов испускаемых пучков рентгеновского излучения
Визуализация к-края
Трехмерная реконструкция тела и контура тела
Способ и система для управления фоновой подсветкой в дисплее
Устройство для излучения поляризованного света
Машина для приготовления напитков, в частности кофе, оснащенная системами предотвращения образования накипи, и способ приготовления напитков, в частности кофе
Осветительное устройство
Парогенерирующее устройство, снабженное гидрофильным покрытием
Определение пространственного распределения отдачи сцинтиллятора
Устройство и способ освещения на основе сид с высоким коэффициентом мощности
Осветительное устройство для полов
Комбинированная система фотоакустического и ультразвукового формирования изображений

