Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ, ВЫПОЛНЕННЫМ С ВОЗМОЖНОСТЬЮ ОХВАТА ОБЪЕКТА ИНТЕРЕСА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к сервосистеме и способу для управления экзоскелетом, выполненным с возможностью охвата объекта интереса, и для подачи на него усилия.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В заявке США 20070203433 описано носимое устройство для стимуляции релаксации, содержащее либо привязные ремни, либо костюм, выполненный из упруго гибкой ткани, плотно одеваемой на туловище. На ткани закреплены электромеханические датчики для преобразования дыхательных движений носителя устройства в электрические сигналы, представляющие частоту и глубину дыхания. На ткани закреплены электрические управляемые преобразователи для обеспечения тактильной обратной связи с телом по дыханию, и электронные схемы применены для обработки электрических сигналов, формируемых электромеханическими датчиками, и для управления преобразователями с регулируемыми последовательностями и частотами.
Упомянутые пояса применяют для измерения частоты дыхания человека. В большинстве ремней применяют газовые датчики для измерения изменения расширения и сокращения грудной клетки во время дыхания. Оказалось, что управляемое дыхание полезно для (быстрой) релаксации, которая, в свою очередь, полезна для здоровья человека. Существующие респираторные пояса только измеряют частоту дыхания, но не обеспечивают встроенную тактильную стимуляцию, т.е. обратную связь с пользователем о том, как следует дышать.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание усовершенствованной сервосистемы, которая способна одновременно измерять дыхание и оказывать воздействие.
В соответствии с первым аспектом, настоящее изобретение относится к сервосистеме для управления экзоскелетом, выполненным с возможностью охвата объекта интереса, и для подачи усилия на объект интереса, при этом упомянутая система содержит:
- серводвигатель, выполненный с возможностью управления положением экзоскелета и, следовательно, усилием, прикладываемым экзоскелетом к объекту интереса,
- измерительный блок, предназначенный для измерения исходного токового сигнала Iисх. в цепи привода, подаваемого источником питания для привода серводвигателя,
- средство низкочастотной фильтрации, выполненное с возможностью исполнения низкочастотной фильтрации Iисх. для определения отфильтрованного токового сигнала Iотфильтр., и
- процессорный блок, выполненный с возможностью определения:
- исполнительного токового сигнала Iисполн. на основании параметров настройки серводвигателя, причем Iисполн. указывает вклад в Iисх. от серводвигателя при отработке положения экзоскелета,
- токового сигнала Iусил. тягового усилия, указывающего усилие, прикладываемое экзоскелетом к объекту интереса, причем Iусил. пропорционально разности между Iотфильтр. и Iисполн..
Из вышеизложенного следует, что предлагается сервосистема, которая может также выполнять функцию датчика усилия, поскольку токовый сигнал Iусил. усилия указывает усилие, прикладываемое экзоскелетом к объекту интереса.
В одном варианте осуществления объектом интереса является туловище пользователя, и при этом экзоскелет является поясом, который охватывает туловище, причем отработка положения пояса содержит приведение охватывающей длины пояса к постоянному значению, причем, Iусил. указывает усилие, прикладываемое поясом к туловищу.
В одном варианте осуществления объектом интереса является туловище пользователя, и при этом экзоскелет является поясом, который охватывает туловище, причем отработка положения содержит поддерживание постоянного значения усилия, прикладываемого поясом к туловищу, посредством изменения положения пояса, причем Iусил. указывает мгновенное усилие, прикладываемое поясом к туловищу, и причем процессорный блок использует Iусил. в качестве рабочего параметра для выдачи команд в серводвигатель для регулировки положения пояса в соответствии с Iусил. таким образом, чтобы получаемое усилие становилось, по существу, постоянным. При этом пояс является «дышащим» вместе с пользователем, что означает, что пояс не ощущается пользователем. Пояс назван так потому, что электрокардиографический (ЭКГ) пояс стесняет грудную клетку совсем немного и вследствие этого воспринимается как помеха. Соответственно, при известном усилии, обеспечивается рабочий параметр, указывающий, следует ли увеличить, уменьшить или поддерживать постоянным усилие/ток на основании того, находится ли пояс в режиме работы с фиксированным положением или режиме работы с фиксированным усилием.
В одном варианте осуществления процессорный блок дополнительно выполнен с возможностью определения дыхания пользователя на основании частоты Iусил.. После выполнения упомянутой низкочастотной фильтрации Iусил. показывает, что ток либо приводит к поддерживанию постоянного значения усилия, либо приводит к растягиванию/сокращению пояса. Следовательно, когда частота сигнала является отчетливым показателем дыхания пользователя, получают синусоидальный токовый сигнал.
В одном варианте осуществления процессорный блок дополнительно выполнен с возможностью определения глубины дыхания пользователя на основании амплитуды Iусил.. Соответственно, глубина получаемого сигнала Iусил. показывает глубину дыхания и, следовательно, сколько вдыхает/выдыхает пользователь.
В одном варианте осуществления экзоскелет является первым и вторым бандажами на голеностопный сустав, содержащими сочленение между ними, которое приводится в действие серводвигателем, при этом серводвигатель отрабатывает положение так, чтобы либо допускать свободное движение сочленения, либо прилагать усилие для поддержки голеностопного сустава.
В одном варианте осуществления процессорный блок определяет усилие, прикладываемое экзоскелетом к объекту интереса по Iусил. на основании амплитуды Iусил. таким образом, что, чем больше становится амплитуда, тем больше становится усилие, прикладываемое экзоскелетом к объекту интереса.
В одном варианте осуществления низкочастотная фильтрация содержит фильтрацию частот ниже 500 Гц, предпочтительнее ниже 50 Гц, еще предпочтительнее ниже 5 Гц, еще предпочтительнее, равных или ниже 1 Гц.
В одном варианте осуществления Iусил. получают из настроек серводвигателя. В одном варианте осуществления настройки серводвигателя содержат скорость, начальное и конечное положения серводвигателя, при этом скорость дает значение электрического тока, которое следует из технических характеристик электродвигателя.
В соответствии с другим аспектом, настоящее изобретение относится к способу управления экзоскелетом, выполненным с возможностью охвата объекта интереса, и подачи на него усилия посредством отработки положения экзоскелета, причем способ содержит следующие этапы:
- измеряют исходный токовый сигнал Iисх. в цепи привода, подаваемый источником питания для привода серводвигателя, чтобы отрабатывать положение экзоскелета,
- выполняют низкочастотную фильтрацию Iисх. для определения отфильтрованного токового сигнала Iотфильтр., и
- определяют исполнительный токовый сигнал Iисполн. на основании параметров настройки серводвигателя, причем Iисполн. указывает вклад в Iисх. от серводвигателя при отработке положения экзоскелета, и
- определяют ток Iусил. тягового усилия, указывающий усилие, прикладываемое экзоскелетом к объекту интереса, причем, Iусил. пропорционален разности между Iотфильтр. и Iисполн..
В соответствии с еще одним аспектом, настоящее изобретение относится к компьютерному программному продукту для выдачи команд в процессорный блок для исполнения этапов упомянутого способа, когда продукт выполняется в компьютерном устройстве.
Каждый из аспектов настоящего изобретения можно объединять с любыми другими аспектами. Вышеприведенные и другие аспекты изобретения станут более понятными из пояснений к нижеописанным вариантам осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения описаны только для примера со ссылкой на чертежи, на которых
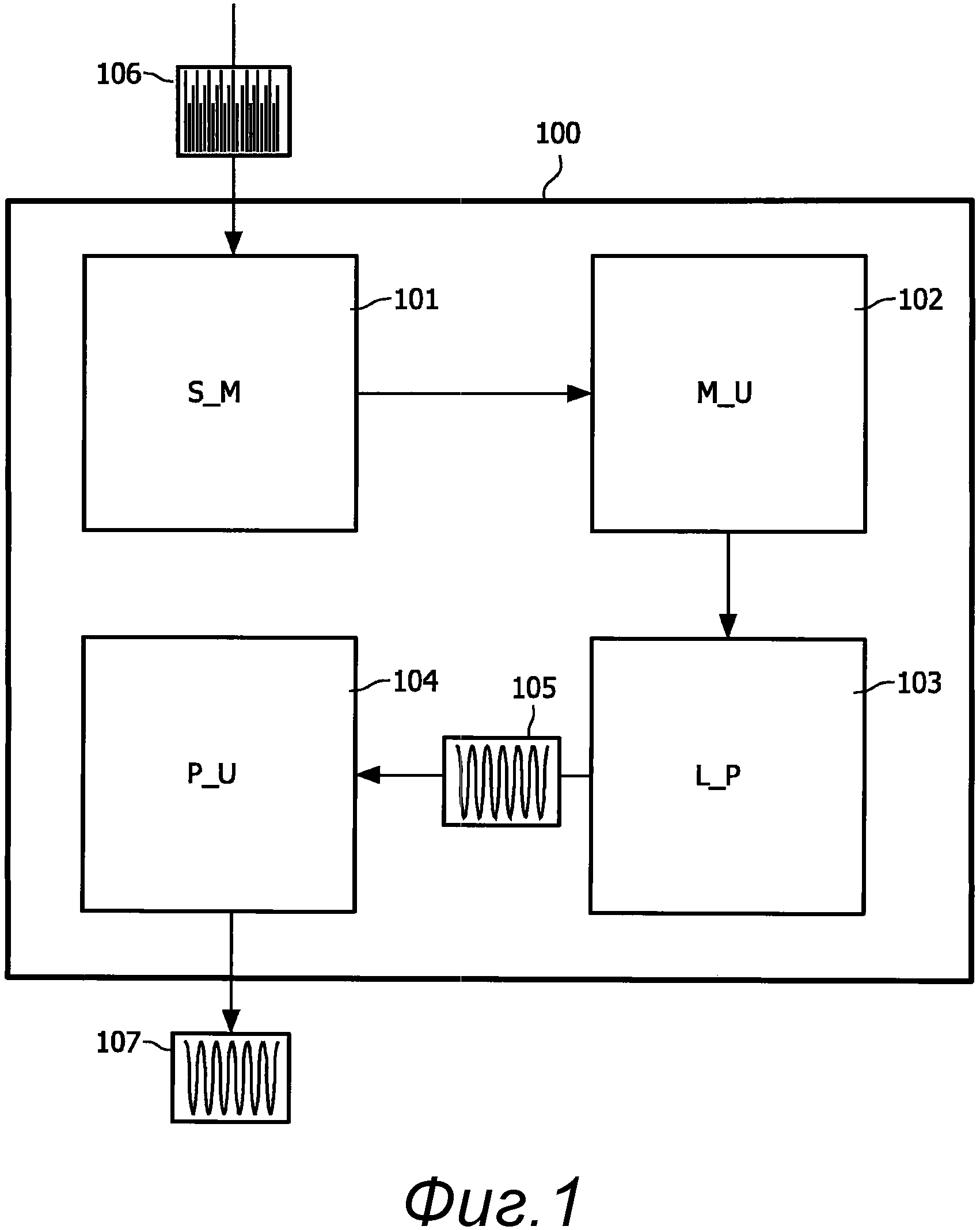
Фигура 1 - представление сервосистемы в соответствии с настоящим изобретением для управления экзоскелетом, выполненным с возможностью охвата объекта интереса, и для подачи на него усилия,
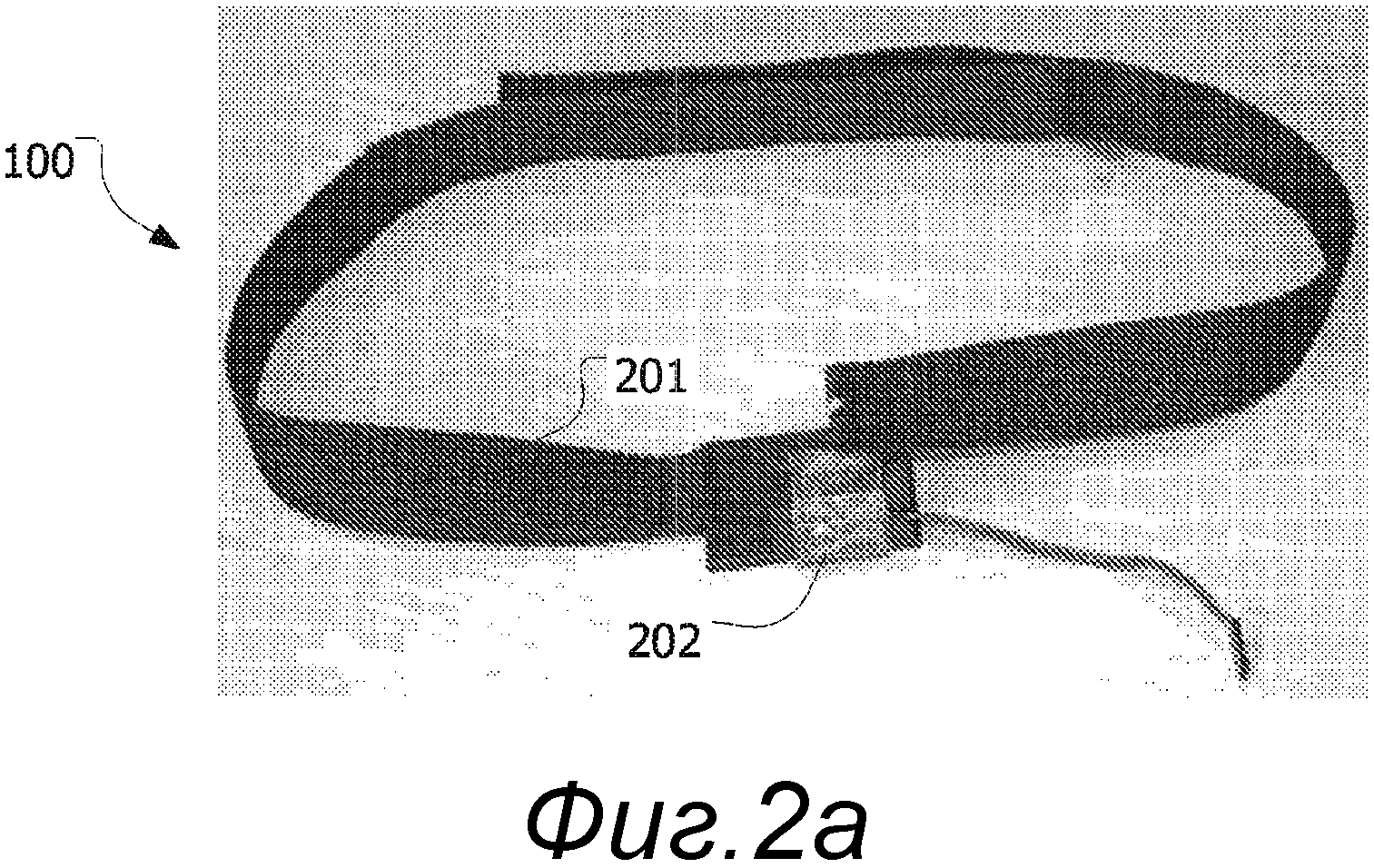
Фигуры 2a, b - изображения варианта осуществления сервосистемы, представленной на фиг.1,
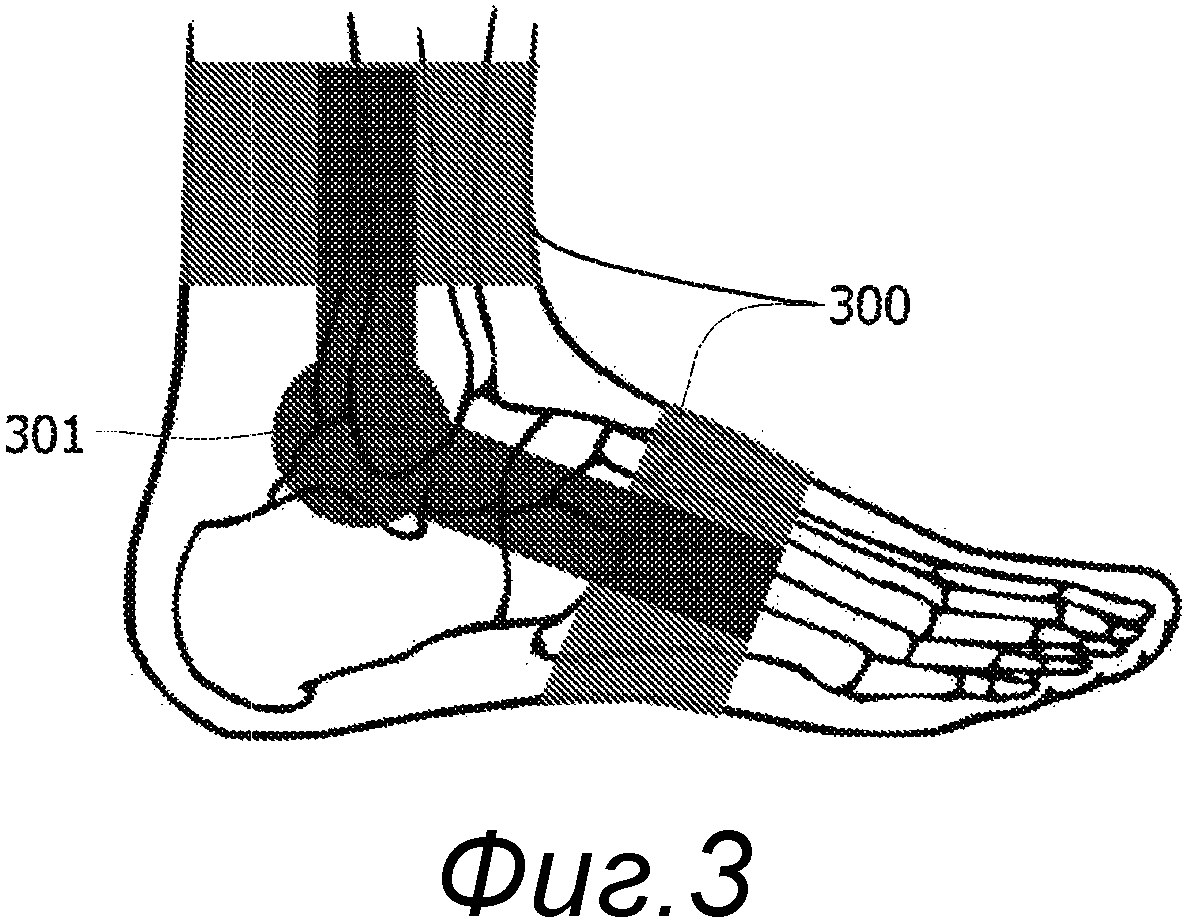
Фигура 3 - изображение варианта осуществления, в котором экзоскелет представляет собой первый и второй бандажи на голеностопный сустав, содержащие сочленение между ними, где расположен серводвигатель,
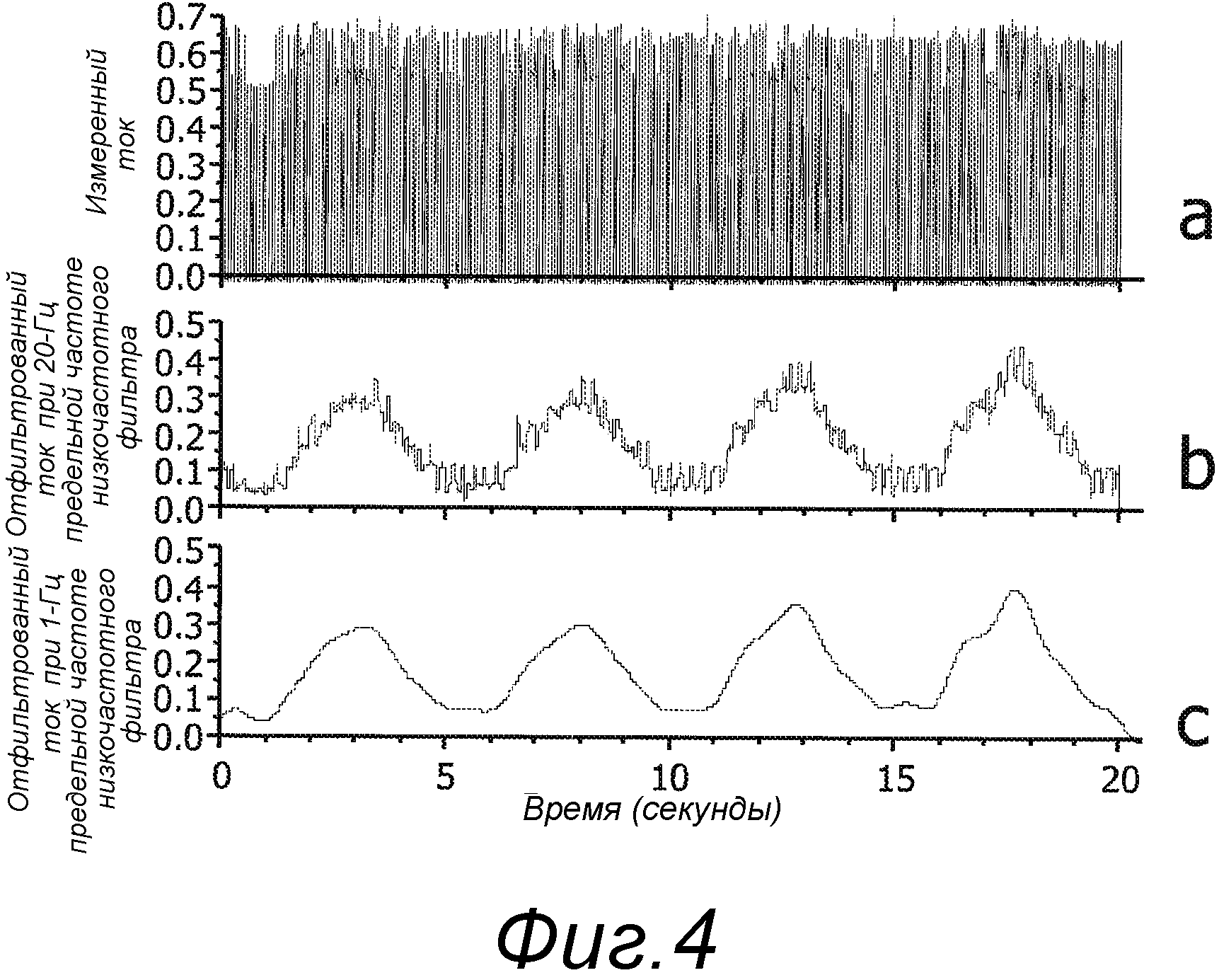
Фигура 4a-c - пример измерения тока через серводвигатель на поясе в то время, когда электродвигатель находится в фиксированном положении,
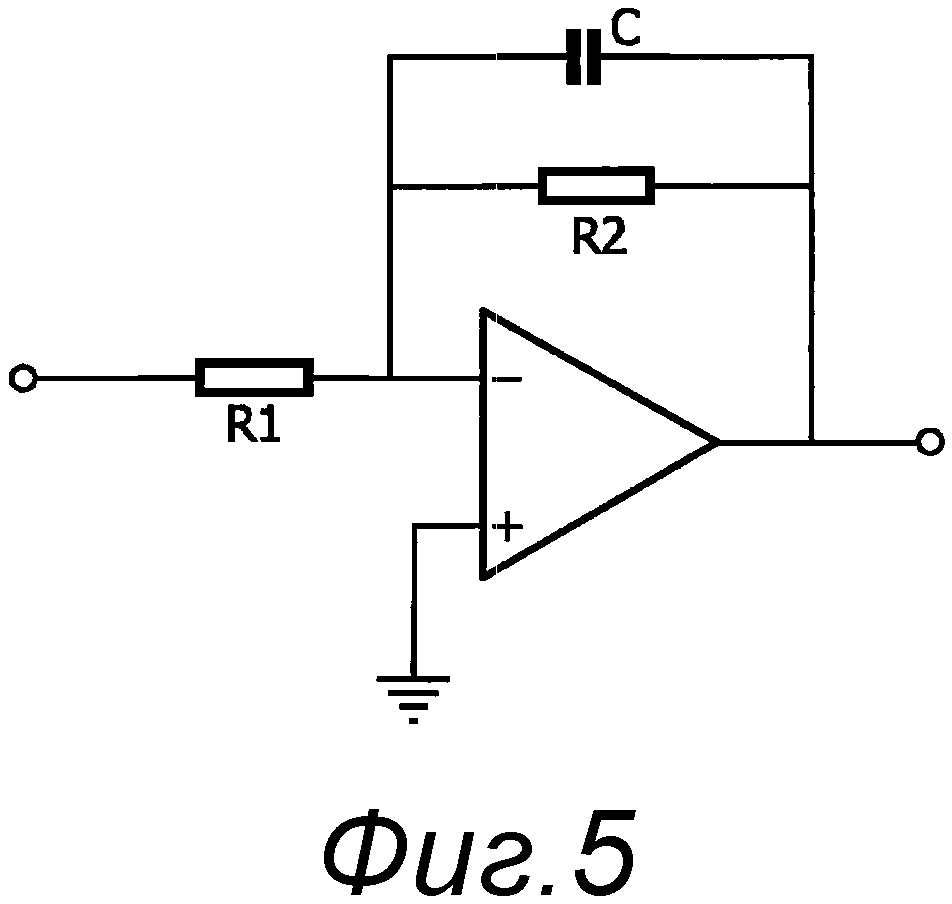
Фигура 5 - один вариант осуществления схемы фильтрации для выполнения низкочастотной фильтрации измеренного исходного токового сигнала Iисх. в цепи привода, и
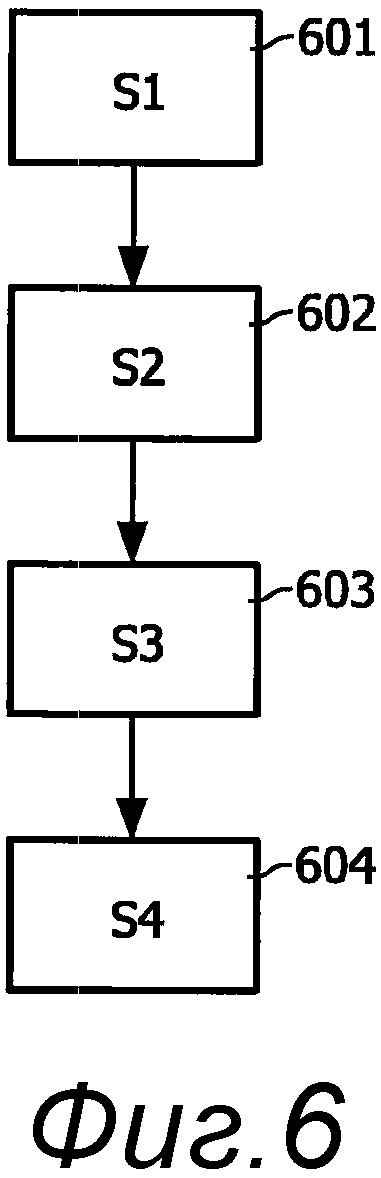
Фигура 6 - блок-схема последовательности операций в варианте осуществления способа в соответствии с настоящим изобретением для управления экзоскелетом, выполненным с возможностью охвата объекта интереса.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фигуре 1 представлена сервосистема 100 в соответствии с настоящим изобретением для управления экзоскелетом, выполненным с возможностью охвата объекта интереса, и для подачи на него усилия. Сервосистема 100 содержит серводвигатель (S_M) 101, измерительный блок (M_U) 102, средство (L_P) 103 низкочастотной фильтрации и процессорный блок (P_U) 104.
Серводвигатель (S_M) 101 предусматривает подключение к источнику питания, например, батарее или солнечному элементу, и выполнен с возможностью управления положением экзоскелета и, следовательно, усилием, прикладываемым экзоскелетом к объекту интереса. Как подробнее поясняется в дальнейшем в связи с фиг. 2 и 3, экзоскелет является, например, поясом, бандажом для голеностопного сустава и т.п., и объектом интереса может быть туловище пользователя или растянутый голеностопный сустав.
Измерительный блок (M_U) 102 предназначен для измерения исходного токового сигнала Iисх. 106 в цепи привода, подаваемого источником питания для привода серводвигателя. Упомянутое измерение подробнее поясняется в дальнейшем в связи с фиг. 4.
Средство (L_P) 103 низкочастотной фильтрации является, например, цифровой или аналоговой схемой или процессором, в котором выполняется низкочастотная фильтрация измеренного исходного токового сигнала Iисх. 106 в цепи привода. Как подробнее поясняется в дальнейшем в связи с фиг.4 и 5, измеренный исходный токовый сигнал Iисх. в цепи привода обычно имеет частоту в килогерцовом диапазоне, например, приблизительно равную 1 кГц, и низкочастотная фильтрация содержит фильтрацию частот ниже 500 Гц, предпочтительно ниже 50 Гц, еще предпочтительнее ниже 5 Гц, еще предпочтительнее, равных или ниже 1 Гц. Результатом фильтрации является отфильтрованный токовый сигнал Iотфильтр. 105.
Процессорный блок (P_U) 104 выполнен с возможностью определения исполнительного токового сигнала Iисполн. на основании параметров настройки серводвигателя, где Iисполн. указывает вклад в Iисх. от серводвигателя, при отработке положения экзоскелета.
Процессорный блок (P_U) 104 дополнительно выполнен с возможностью определения токового сигнала Iусил. 107 тягового усилия, указывающего усилие, прикладываемое экзоскелетом к объекту интереса, где Iусил. пропорционально разности между Iотфильтр. и Iисполн., т.е. Iусил. ~ (Iотфильтр. - Iисполн.).
В одном варианте осуществления упомянутое усилие определяется по амплитуде токового сигнала Iусил. 107 тягового усилия таким образом, что, чем больше становится амплитуда, тем больше становится усилие, прикладываемое экзоскелетом к объекту интереса. Упомянутое определение можно выполнить, например, с использованием простой калибровки, когда фактическое усилие измеряют для нескольких разных значений усилия с помощью датчика фактического усилия (внешнего датчика усилия) и сравнивают с амплитудой токового сигнала Iусил. 107 тягового усилия.
Для дополнительного пояснения порядка работы типичного серводвигателя серводвигатель может регулировать свое положение в соответствии с некоторым кодированным сигналом, который обеспечивается сервоконтроллером. Кодирование обычно выполняется методом широтно-импульсной модуляции (ШИМ) прямоугольного импульсного сигнала с заданной частотой и амплитудой от 0 В до заданной амплитуды, например, 5 В. При данной ШИМ серводвигатель перемещается в соответствующее положение, для чего серводвигателю требуется отбирать исходный токовый сигнал Iисх. 106 в цепи привода из его блока питания. После того, как серводвигатель достиг положения, относящееся к настройке ШИМ, серводвигатель будет стремиться оставаться в данном положении. В данном случае, исходный токовый сигнал Iисх. 106 в цепи привода, отбираемый из блока питания, будет зависеть непосредственно от усилия, прикладываемого к серводвигателю. При применении упомянутой фильтрации исходного токового сигнала Iисх. 106 в цепи привода получают Iотфильтр. 105. Если серводвигатель одновременно применяется в качестве исполнительного механизма, то серводвигатель изменяет свое положение, но данное изменение положения требует, чтобы серводвигатель отбирал дополнительный ток. Если изменение положения вызывает затягивание или ослабление пояса, то изменяется усилие и тем самым Iотфильтр.. Упомянутое изменение положения приводит к изменению упомянутого Iисполн., который вносит вклад в Iисх. 106 и, следовательно, в Iотфильтр. 105. Iусил. можно вывести, например, из настроек исполнительного механизма, а именно из скорости, начального и конечного положения. Скорость дает значение электрического тока, которое следует из технических характеристик электродвигателя. Разность между начальным и конечным положениями, деленная на скорость, дает, в результате, продолжительность увеличения электрического тока вследствие приведения в действие.
На основании вышеизложенного, при известных Iотфильтр. и Iисполн., вклад электрического токового сигнала, обусловленного усилием, прикладываемым экзоскелетом к объекту интереса, может быть выражен следующим уравнением:
I_усил. = (I_отфильтр. - I_исполн.)/PWM,  (1)
(1)
где как I_исполн., так и PWM (ШИМ) выводят из априорного знания о сервосистеме и способе приведения ее в движение. Как пояснялось выше, I_усил. обеспечивает информацию об усилии, прикладываемом экзоскелетом к объекту интереса, а также информацию о частоте дыхания человека. В случае, когда экзоскелет поддерживается в постоянном положении, I_исполн. равен нулю, тогда как в случае, когда серводвигатель одновременно применяется в качестве исполнительного механизма, I_исполн. является ненулевым.
На фигурах 2a, b изображен вариант осуществления сервосистемы 100, представленной на фиг.1, где объектом интереса является туловище 203 пользователя 200, и где экзоскелет является поясом 201, который охватывает туловище. В данном случае существуют два варианта измерения - один заключается в сохранении постоянного положения двигателя, т.е. предусматривает переменное усилие, и другой вариант измерения заключается в сохранении постоянного значения усилия (постоянной амплитуды lусил.), при этом длина пояса соответственно регулируется.
Когда положение двигателя сохраняется постоянным, усилие можно контролировать посредством контроля Iусил., так как токовый сигнал Iусил. тягового усилия означает ток, отбираемый из блока питания, необходимый для поддерживания постоянного положения пояса 201, и, следовательно, указывает усилие, прикладываемое поясом 201 к туловищу. В упомянутом постоянном положении настройку пояса можно регулировать, например, таким образом, чтобы максимальный ток во время дыхательного цикла составлял, например, 70% от максимально допустимого токового сигнала Iусил.. Частота токового сигнала Iусил. тягового усилия, который обычно имеет синусоидальную форму, показывает интенсивность дыхания пользователя таким образом, что, чем выше частота, тем интенсивнее дыхание. Кроме того, глубину токового сигнала Iусил. тягового усилия можно использовать как показатель, указывающий глубину дыхания пользователя и, следовательно, объем, который пользователь вдыхает/выдыхает.
Когда, с другой стороны, измерение основано на сохранении постоянной амплитуды токового сигнала Iусил. тягового усилия, пояс 201 прикладывает постоянное усилие к туловищу пользователя, и дыхание следует из положения. Соответственно, отработка положения основана на поддерживании постоянного значения усилия, прикладываемого поясом к туловищу, посредством изменения положения пояса таким образом, чтобы поддерживать постоянную амплитуду токового сигнала Iусил. тягового усилия и, следовательно, мгновенное усилие, прикладываемое поясом к туловищу. При этом серводвигатель использует Iусил. в качестве рабочего параметра посредством регулирования положения пояса в соответствии с Iусил. таким образом, что полученное усилие становится, по существу, постоянным. Приведенный вариант измерения является менее навязчивым и потребляет меньше мощности, если выдерживается настройка невысокого электрического тока. Например, допустим, что Iусил.(0 сек)=1 Н, Iусил.(0,2 сек)=1,2 Н, пояс 201 будет растягиваться, пока не достигается Iусил.(0,4 сек)=1 Н. Разумеется, существуют различные показатели времени при определении Iусил., например, Iусил. может определяться ежесекундно, 10 раз в секунду или больше или меньше, чем 10 раз в секунду.
На фигуре 3 показан вариант осуществления, в котором экзоскелет представляет собой первый и второй бандажи 300 на голеностопный сустав, содержащие сочленение 301 между ними, где расположен серводвигатель, при этом сочленение приводится в действие серводвигателем. Соответственно, серводвигатель отрабатывает положение так, чтобы либо допускать свободное движение сочленения, т.е. поддерживать постоянное значение Iусил. (амплитуду), либо прилагать усилие для поддержки голеностопного сустава.
На фигуре 4a-c представлен пример измерения тока через серводвигатель на экзоскелете (поясе) в то время, когда электродвигатель удерживается в фиксированном положении. Исходные данные Iисх. показаны на фиг.4a и представляют ток, приводящий в движение серводвигатель. Широтно-импульсно-модулированное (ШИМ) возбуждение серводвигателя приводит к высокочастотному сигналу (с частотой приблизительно 1 кГц). На фигуре 4b показано, что при 20-Гц низкочастотной фильтрации Iисх. получается отфильтрованный токовый сигнал Iотфильтр., в котором еще заметна механическая характеристика двигателя в форме колебаний (4-6 Гц). На фигуре 4c показано, что при использовании 1 Гц низкочастотного фильтра получают более чистый сигнал Iотфильтр.. Поскольку данный пример относится к сценарию, в котором положение экзоскелета является фиксированным, то Iисполн. равен нулю (смотри уравнение 1). Следовательно, Iотфильтр. соответствует Iусил.. Таким образом, данный чистый Iотфильтр. (Iусил.) дает очень чистый сигнал дыхания пользователя экзоскелета (например, пояса). Как пояснялось выше, возрастающая амплитуда токового сигнала Iусил. тягового усилия соответствует вдоху, а уменьшающийся ток соответствует выдоху. Как показано, данный характер изменения обусловлен большим различием между частотой ШИМ и частотой интереса, к которой применима вышеописанная жесткая фильтрация.
На фигуре 5 представлен один вариант осуществления схемы фильтрации. Исходный токовый сигнал Iисх. в цепи привода может быть представлен либо в аналоговой, либо в цифровой форме. Упомянутый низкочастотный фильтр может работать с использованием частоты среза ω0=1/(R2×C). Аналоговая фильтрация может выполняться посредством простой резистивно-емкостной цепи (RC-цепи) или активным фильтром, показанным на данной фигуре. При цифровой обработке сигнала следует дискретизировать с частотой предпочтительно, по меньшей мере, вдвое выше частоты сигнала интереса (частотой Найквиста). В данном варианте осуществления частота дискретизации равна нескольким Гц, что намного меньше, чем частота ШИМ (~ кГц). При дискретизации с несколько более высокой частотой (например, парой десятков Гц по-прежнему намного ниже частоты ШИМ) и взятии скользящего среднего по дискретизированным значениям сигнал сглаживается (смотри фиг. 4).
На фигуре 6 представлена блок-схема последовательности операций в варианте осуществления способа в соответствии с настоящим изобретением для управления экзоскелетом, выполненным с возможностью охвата объекта интереса, и для подачи на него усилия, при этом серводвигатель подсоединен к источнику питания, выполненному с возможностью управления положением экзоскелета и, следовательно, усилием, прикладываемым экзоскелетом к объекту интереса.
На этапе (S1) 601 измеряют исходный токовый сигнал Iисх. в цепи привода, подаваемый источником питания для привода серводвигателя, на этапе (S2) 602 выполняют низкочастотную фильтрацию Iисх. для определения подаваемого отфильтрованного токового сигнала Iотфильтр., на этапе (S3) 603 определяют исполнительный токовый сигнал Iисполн. на основании параметров настройки серводвигателя, где Iисполн. указывает вклад в Iисх. от серводвигателя при отработке положения экзоскелета, и на этапе (S4) 604 определяют ток Iусил. тягового усилия, указывающий усилие, прикладываемое экзоскелетом к объекту интереса, где Iусил. пропорционален разности между Iотфильтр. и Iисполн.. За дополнительным пояснением каждого соответствующего этапа следует обращаться к вышеприведенному описанию со ссылкой на фиг.1-5.
Некоторые конкретные детали представленного варианта осуществления изложены с целью пояснения, а не ограничения, чтобы обеспечить ясное и полное понимание настоящего изобретения. Однако специалистам в данной области техники должно быть понятно, что настоящее изобретение можно практически применить в других вариантах осуществления, которые не согласуются в точности с деталями, изложенными в настоящем описании, но не выходят значительно за пределы существа и объема настоящего изобретения. Кроме того, в данной связи, для краткости и ясности не приведены подробные описания общеизвестных устройств, схем и методов, чтобы исключить необязательные подробности и возможную неразборчивость.
В формуле изобретения содержатся позиции, однако включение позиций служит только для ясности понимания и не следует истолковывать в смысле ограничения объема формулы изобретения.
Система предупреждения падения
Система и способ для лечения синдрома гиповентиляции при ожирении
Оптический узел для торцевой крышки осветительного устройства
Послепациентный динамический фильтр для компьютерной томографии (ст)
Устройство обнаружения для обнаружения объекта
Система регулирования амплитуды в устройстве для ухода за полостью рта
Активный клапан для аппаратов искусственной вентиляции легких
Способ и устройство для выбора по меньшей мере одного медийного элемента
Система и способ для генерации аудиосигнала
Система медицинской визуализации
Масштабируемое кодирование и декодирование изображений

