Результат интеллектуальной деятельности: СПОСОБ ПОИСКА НЕИСПРАВНОГО БЛОКА В НЕПРЕРЫВНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ НА ОСНОВЕ СМЕНЫ ПОЗИЦИИ ВХОДНОГО СИГНАЛА
Вид РИД
Изобретение
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправного блока в динамической системе (Способ поиска неисправного блока в динамической системе: пат. РФ 2439648, МПК7 G05B 23/02 (2006.01) / Шалобанов С.В., Шалобанов С.С. - №2010142159/08; заявл. 13.10.2010; опубл. 10.01.2012, Бюл. №1).
Недостатком этого способа является то, что он использует задание величин относительных отклонений параметров передаточных функций для моделей с пробными отклонениями.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала (Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала: пат. РФ 2528135, МПК7 G05B 23/02 (2006.01) / Шалобанов С.С. - №2013144231/08; заявл. 01.10.2013; опубл. 10.09.2014, Бюл. №25).
Недостатком этого способа является то, что он обеспечивает определение дефектов с невысокой различимостью, то есть обладает невысокой помехоустойчивостью.
Технической задачей, на решение которой направлено изобретение, является улучшение помехоустойчивости способа диагностирования непрерывных систем автоматического управления путем улучшения различимости дефектов. Это достигается путем применения многократного вычисления интегральных оценок динамических характеристик для нескольких различных значений параметра интегрирования α1, α2…αn.
Поставленная задача достигается тем, что регистрируют реакцию заведомо исправной системы fjном(t), j=1,…, k, на интервале t ∈ [0, ТК] в k контрольных точках и многократно определяют (одновременно) интегральные оценки выходных сигналов Fjном(αl), j=1,…, k; l=1,…, n, системы для n значений параметра интегрирования αl, для чего в момент подачи тестового сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование выходных сигналов системы управления для n параметров интегрирования в каждой из k контрольных точек с весами  путем подачи на первые входы k·n блоков перемножения выходных сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальные сигналы
путем подачи на первые входы k·n блоков перемножения выходных сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальные сигналы  для n блоков интегрирования, выходные сигналы k·n блоков перемножения подают на входы k·n блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(αl), j=1,…, k; l=1,…, n, регистрируют, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, n параметров интегрирования и каждой из m позиций входного сигнала, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы для n параметров αl и тестового сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала Yji(αl), j=1,…, k; i=1,…, m; l=1,…, n, регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков ΔYji(αl)=Yji(αl)-Fjном(αl), j=1,…, k; i=1,…, m; l=1,…, n, определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков из соотношения
для n блоков интегрирования, выходные сигналы k·n блоков перемножения подают на входы k·n блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(αl), j=1,…, k; l=1,…, n, регистрируют, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, n параметров интегрирования и каждой из m позиций входного сигнала, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы для n параметров αl и тестового сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала Yji(αl), j=1,…, k; i=1,…, m; l=1,…, n, регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков ΔYji(αl)=Yji(αl)-Fjном(αl), j=1,…, k; i=1,…, m; l=1,…, n, определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков из соотношения

замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют интегральные оценки сигналов контролируемой системы для k контрольных точек и для n параметров интегрирования αl: Fj(αl), j=1,…, k; l=1,…, n, определяют деформации интегральных оценок сигналов контролируемой системы для k контрольных точек и n параметров интегрирования от номинальных значений ΔFj(αl)=Fj(αl)-Fjном(αl), j=1,…, k; l=1,…, n, определяют нормированные значения деформаций интегральных оценок сигналов контролируемой системы для n параметров интегрирования из соотношения

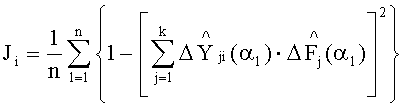
определяют диагностические признаки при n параметрах интегрирования из соотношения:

по минимуму значения диагностического признака определяют неисправный блок.
Таким образом, предлагаемый способ поиска неисправного блока сводится к выполнению следующих операций:
1. В качестве динамической системы рассматривают систему, состоящую из произвольно соединенных m динамических элементов.
2. Предварительно определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Определяют n параметров кратных 5/ТК многократного интегрирования сигналов.
4. Фиксируют число контрольных точек k.
5. Предварительно определяют нормированные векторы ΔYi(αl) деформаций интегральных оценок выходных сигналов модели, полученные в результате смены позиции входного сигнала на позицию после i-го блока каждого из m блоков для номинальных значений параметров передаточных функций блоков и n определенных выше параметров αl для чего выполняют пункты 6-10.
6. Подают тестовый сигнал x(t) (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
7. Регистрируют реакцию системы fjном(t), j=1,…, k на интервале t ∈ [0, ТК] в k контрольных точках и определяют интегральные оценки выходных сигналов Fjном(αl), j=1,…, k; l=1,…, n системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают интегрирование (при n параметрах αl) выходных сигналов системы управления в каждой из k контрольных точек с весами  , для чего выходные сигналы системы управления подают на первые входы k·n блоков перемножения, на вторые входы блоков перемножения подают экспоненциальные сигналы
, для чего выходные сигналы системы управления подают на первые входы k·n блоков перемножения, на вторые входы блоков перемножения подают экспоненциальные сигналы  , выходные сигналы k·n блоков перемножения подают на входы k·n блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(αl), j=1,…, k; l=1,…, n, регистрируют.
, выходные сигналы k·n блоков перемножения подают на входы k·n блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(αl), j=1,…, k; l=1,…, n, регистрируют.
8. Определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек и каждого из n значений параметра интегрирования, αl, полученные в результате перемещения позиции входного сигнала на позицию после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают позицию входного сигнала на выход блока, подают через сумматор входной сигнал и выполняют пункты 6 и 7 для одного и того же входного сигнала x(t). Полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждой из m моделей с перемещенной позицией входного сигнала Yji(αl), j=1,…, k; i=1,…, m; l=1,…, n, регистрируют.
9. Определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала от входа на позицию после каждого из соответствующих блоков ΔYji(αl)=Yji(αl)-Fjном(αl), j=1,…, k; i=1,…, m;l=1,…, n.
10. Определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после соответствующих блоков по формуле:
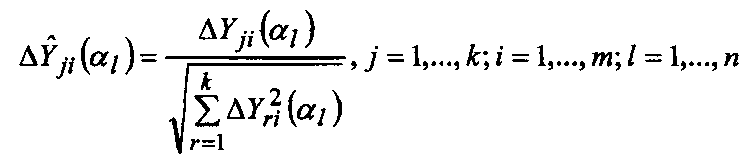 .
.
11. Замещают систему с номинальными характеристиками контролируемой. На вход системы подают аналогичный тестовый сигнал x(t).
12. Определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек и n параметров интегрирования Fj(αl), j=1,…, k; l=1,…, n, осуществляя операции, описанные в пунктах 6 и 7, применительно к контролируемой системе.
13. Определяют деформации интегральных оценок выходных сигналов контролируемой системы для k контрольных точек и n параметров интегрирования от номинальных значений ΔFj(αl)=Fj(αl)-Fjном(αl), j=1,…, k; l=1,…, n.
14. Вычисляют нормированные значения деформаций интегральных оценок выходных сигналов контролируемой системы по формуле:
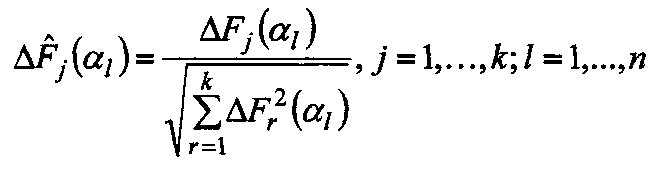 .
.
15. Вычисляют диагностические признаки наличия неисправного блока (при n параметрах интегрирования) по формуле (3).
16. По минимуму значения диагностического признака определяют дефектный блок.
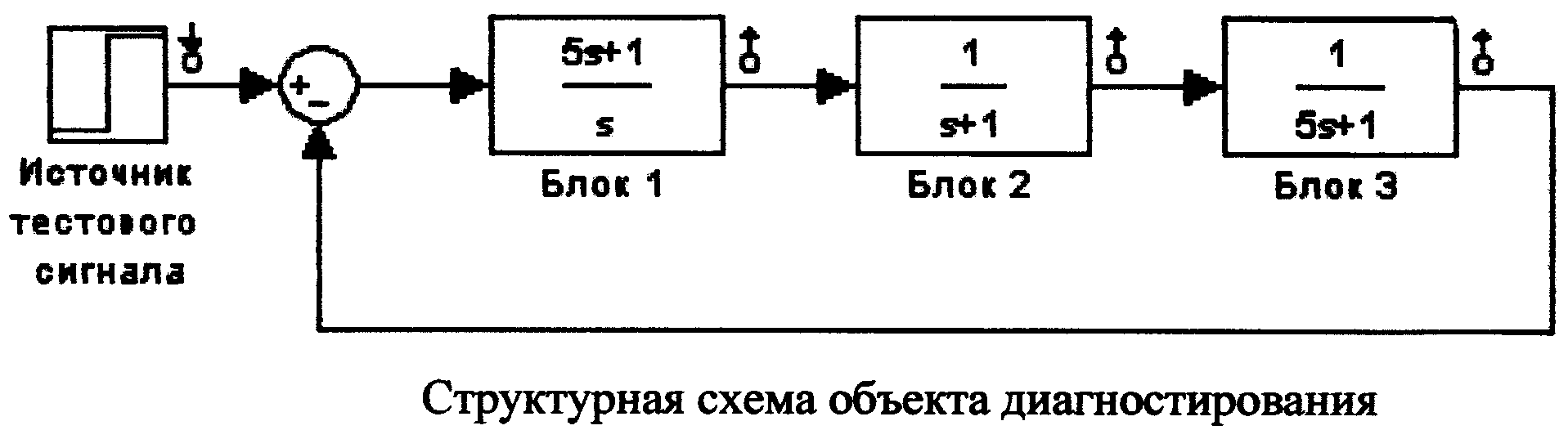
Рассмотрим реализацию предлагаемого способа поиска одиночного дефекта для системы, структурная схема которой представлена на чертеже.
Передаточные функции блоков:  ;
;  ;
;  ,
,
где номинальные значения параметров: Т1=5 с; k1=l; k2=l; Т2=1 с; k3=1; Т3=5 с.
При моделировании в качестве входного сигнала будем использовать единичное ступенчатое воздействие. Время контроля ТК выберем равным 10 с.
Моделирование процессов поиска дефектов в первом блоке (в виде уменьшения параметра T1 на 20%) приводит к вычислению диагностических признаков при двух параметрах интегрирования (α1=0,1 и α2=2,5) по формуле (3): J1=0,0005, J2=0,8258, J3=0,1086. Различимость дефекта: ΔJ=J3-J1=0,108.
Для сравнения приведем диагностические признаки наличия неисправного блока при одном параметре интегрирования α=0,5 (Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала: пат. РФ 2528135, МПК7 G05B 23/02 (2006.01) / Шалобанов С.С. - №2013144231/08; заявл. 01.10.2013; опубл. 10.09.2014, Бюл. №25): J1=0, J2=0,78, J3=0,074. Различимость дефекта ΔJ=J3-J1=0,074.
Приведенные результаты показывают, что фактическая различимость нахождения дефектов этим способом выше, следовательно, выше будет и помехоустойчивость способа.
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала, основанный на том, что фиксируют число m динамических элементов, входящих в состав системы, определяют время контроля Т≥Т, используют параметр интегрирования сигналов α, используют тестовый сигнал на интервале t∈[0, Т], в качестве динамических характеристик системы используют интегральные оценки, полученные для вещественных значений α переменной Лапласа, фиксируют число k контрольных точек системы, регистрируют реакцию объекта диагностирования и модели, регистрируют реакцию заведомо исправной системы f(t), j=1, …, k, на интервале t∈[0, Т] в k контрольных точках и определяют интегральные оценки выходных сигналов системы, для чего в момент подачи тестового сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование выходных сигналов системы управления в каждой из k контрольных точек с весами e путем подачи на первые входы k блоков перемножения выходных сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальный сигнал e, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов регистрируют, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы для параметра α и тестового сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков, определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек для параметра α, определяют деформации интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений, определяют нормированные значения деформаций интегральных оценок выходных сигналов контролируемой системы, определяют диагностические признаки, по минимуму диагностического признака определяют неисправный блок, отличающийся тем, что определяют n параметров интегрирования сигналов, кратных , в качестве динамических характеристик системы используют интегральные оценки, полученные для n вещественных значений α, и определяют интегральные оценки выходных сигналов F(α), j=1, …, k, l=1, …, n, системы, для чего в момент подачи тестового сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование выходных сигналов системы управления в каждой из k контрольных точек для n параметров интегрирования с весами , l=1, …, n, путем подачи на первые входы k·n блоков перемножения выходных сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальные сигналы , l=1, …, n, выходные сигналы k·n блоков перемножения подают на входы k·n блоков интегрирования, интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов F(α), j=1, …, k; l=1, …, n, регистрируют, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек и n параметров интегрирования, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы для n параметров α и тестового сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала Y(α), j=1, …, k; i=1, …, m; l=1, …, n, регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоковΔY(α)=Y(α)-F(α), j=1, …, k; i=1, …, m; l=1, …, n,определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков из соотношения: , определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек и n параметров интегрирования F(α), j=1, …, k; l=1, …, n, определяют деформации интегральных оценок выходных сигналов контролируемой системы для k контрольных точек и n параметров интегрирования от номинальных значений ΔF(α)=F(α)-F(α), j=1, …, k; l=1, …, n, определяют нормированные значения деформаций интегральных оценок выходных сигналов контролируемой системы из соотношения: , определяют диагностические признаки из соотношения: , i=1, …, m, по минимуму диагностического признака определяют неисправный блок.



Водоочиститель
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Смеситель
Гидроцилиндр
Способ формирования короткой комбинированной забойки взрывных скважин с каменным материалом и устройство для его осуществления
Способ формирования короткой комбинированной забойки взрывных скважин и устройство для его осуществления
Водоочиститель для получения талой питьевой воды
Смеситель
Прибор для измерения угловых параметров пил
Гвоздь
Устройство для изготовления подшипника скольжения намоткой
Способ ремонта гидравлических двигателей
Защитная композиция для деревянных строительных конструкций
Способ ремонта гидравлических двигателей
Способ переработки медного гальваношлама
Антикоррозионное защитное полимерное покрытие
Самоходный перегрузочный бункер
Способ автоматической фокусировки камеры
Устройство для тушения лесных пожаров
Способ заготовки древесины на крутых склонах с использованием валочно-пакетирующей машины и аэростатно-канатной системы

