Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ БОРЬБЫ С ПЕСКОПРОЯВЛЕНИЕМ В СКВАЖИНЕ С ИСПОЛЬЗОВАНИЕМ ДАТЧИКА ПОЛОЖЕНИЯ ИНСТРУМЕНТА
Вид РИД
Изобретение
Уровень техники
Варианты воплощения, описанные здесь, в общем относятся к контролю положения скважинного инструмента в стволе скважины. В частности, варианты воплощения относятся к контролю положения рабочего инструмента во время операции по борьбе с пескопроявлением.
Традиционные операции по борьбе с пескопроявлением включали рабочий инструмент и нижний узел заканчивания скважины. Рабочий инструмент соединяется с нижним узлом заканчивания скважины, и два компонента опускаются в скважину вместе. После достижения требуемой глубины пакер, соединенный с нижним узлом заканчивания скважины, устанавливается в положение для закрепления нижнего узла заканчивания скважины в скважине. После установки пакера рабочий инструмент отделяется от нижнего узла заканчивания скважины. После отделения рабочий инструмент может использоваться в процессе заполнения скважинного фильтра гравием.
Процесс заполнения скважинного фильтра гравием требует перемещения рабочего инструмента в скважине для совмещения одного или более кроссоверных портов рабочего инструмента с одним или более портами оснащения в нижнем узле заканчивания скважины или выше него. При этом совмещение портов требует прецизионного позиционирования рабочего инструмента. Однако факторы, действующие в скважине, такие как давление, смещение бурильной трубы, сжатие и/или расширение бурильной трубы, как правило, влияют на положение рабочего инструмента, затрудняя совмещение портов. Поэтому необходимы усовершенствованная система и способ для контроля положения рабочего инструмента в скважине.
Сущность изобретения
Предоставляются системы и способы контроля положения рабочего инструмента в скважине. В одном аспекте способ может быть реализован позиционированием рабочего инструмента в скважине, и рабочий инструмент может иметь узел датчика, соединенный с ним. Рабочий инструмент может перемещаться в пределах скважины. Расстояние, пройденное рабочим инструментом в скважине, может быть измерено с помощью узла датчика. Положение рабочего инструмента в скважине может быть определено путем сравнения расстояния, пройденного относительно неподвижной точки отсчета.
В одном аспекте система может включать узел заканчивания скважины и рабочий инструмент. Пакер может быть соединен с узлом заканчивания скважины и адаптирован для закрепления узла заканчивания скважины в стационарном положении в пределах скважины. Рабочий инструмент может быть соединен с узлом заканчивания скважины и рабочий инструмент может быть адаптирован для отделения от узла заканчивания скважины после закрепления пакера. Узел датчика может быть соединен с рабочим инструментом. Узел датчика может включать колесо, которое адаптировано для контакта и качения вдоль стенки скважины по мере перемещения рабочего инструмента в пределах скважины. Узел датчика может быть адаптирован для измерения расстояния, пройденного рабочим инструментом, и расстояние может соответствовать числу оборотов колеса. Узел датчика может быть адаптирован для определения положения рабочего инструмента в скважине сверкой пройденного расстояния относительно стационарной точки отсчета.
Краткое описание чертежей
Чтобы представляемые функции могли быть поняты в деталях, более конкретное описание, кратко изложенное выше, может быть рассмотрено с обращением к одному или более вариантам воплощения, некоторые из которых иллюстрируются в прилагаемых чертежах. Необходимо отметить, однако, что прилагаемые чертежи иллюстрируют только типичные варианты воплощения и, поэтому, не должны рассматриваться как ограничивающие их объем, и изобретение может допускать другие эффективные варианты воплощения.
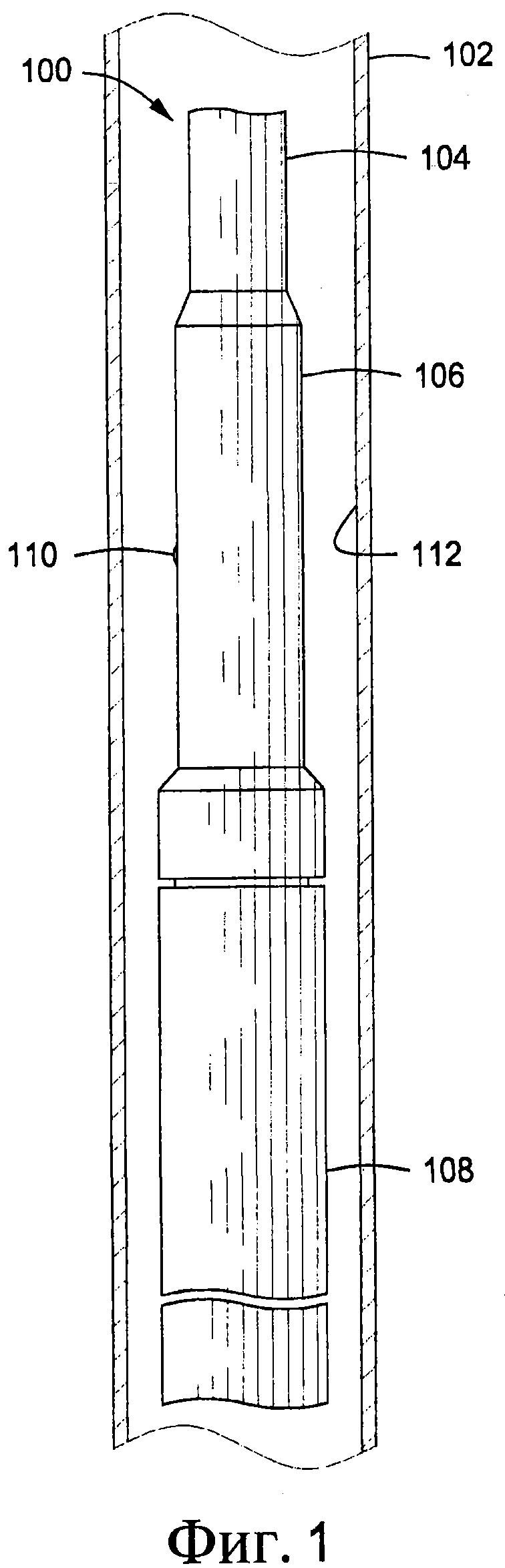
Фигура 1 показывает вид поперечного сечения скважинного инструментального узла, имеющего узел датчика в нерабочем положении, в соответствии с одним или более описанных вариантов воплощения.
Фигура 2 показывает вид поперечного сечения скважинного инструментального узла на Фигуре 1, имеющего узел датчика в рабочем положении, в соответствии с одним или более описанных вариантов воплощения.
Фигура 3 показывает перспективный вид иллюстративного узла датчика в нерабочем положении в соответствии с одним или более описанных вариантов воплощения.
Фигура 4 показывает вид в перспективе иллюстративного узла датчика на Фигуре 3 в рабочем положении в соответствии с одним или более описанных вариантов воплощения.
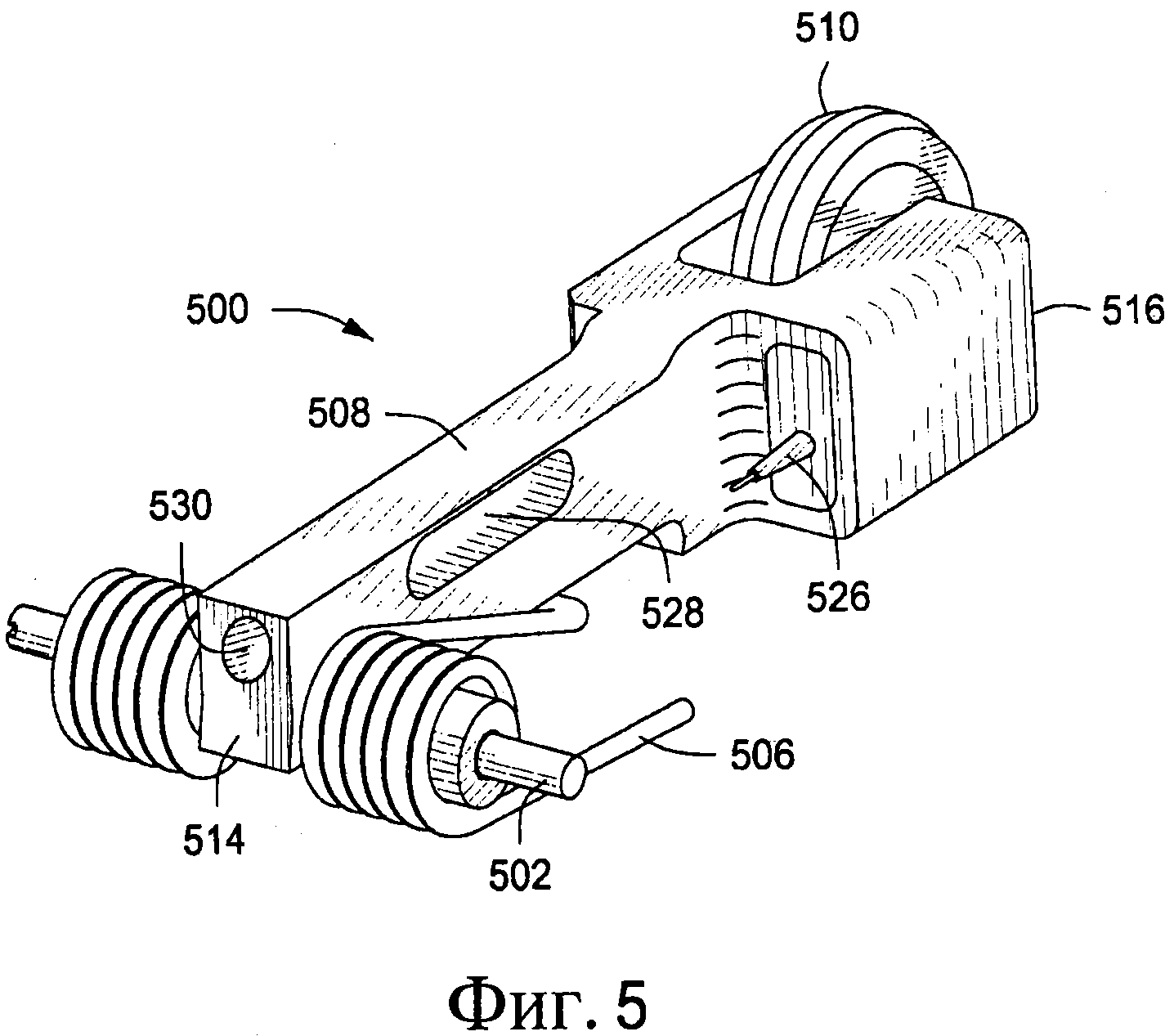
Фигура 5 показывает вид в перспективе другого иллюстративного узла датчика в соответствии с одним или более описанных вариантов воплощения.
Фигура 6 показывает поперечное сечение узла датчика на Фигуре 5 в соответствии с одним или более описанных вариантов воплощения.
Фигура 7 показывает иллюстративное колесо, которое может быть соединено с узлом датчика, в соответствии с одним или более описанных вариантов воплощения.
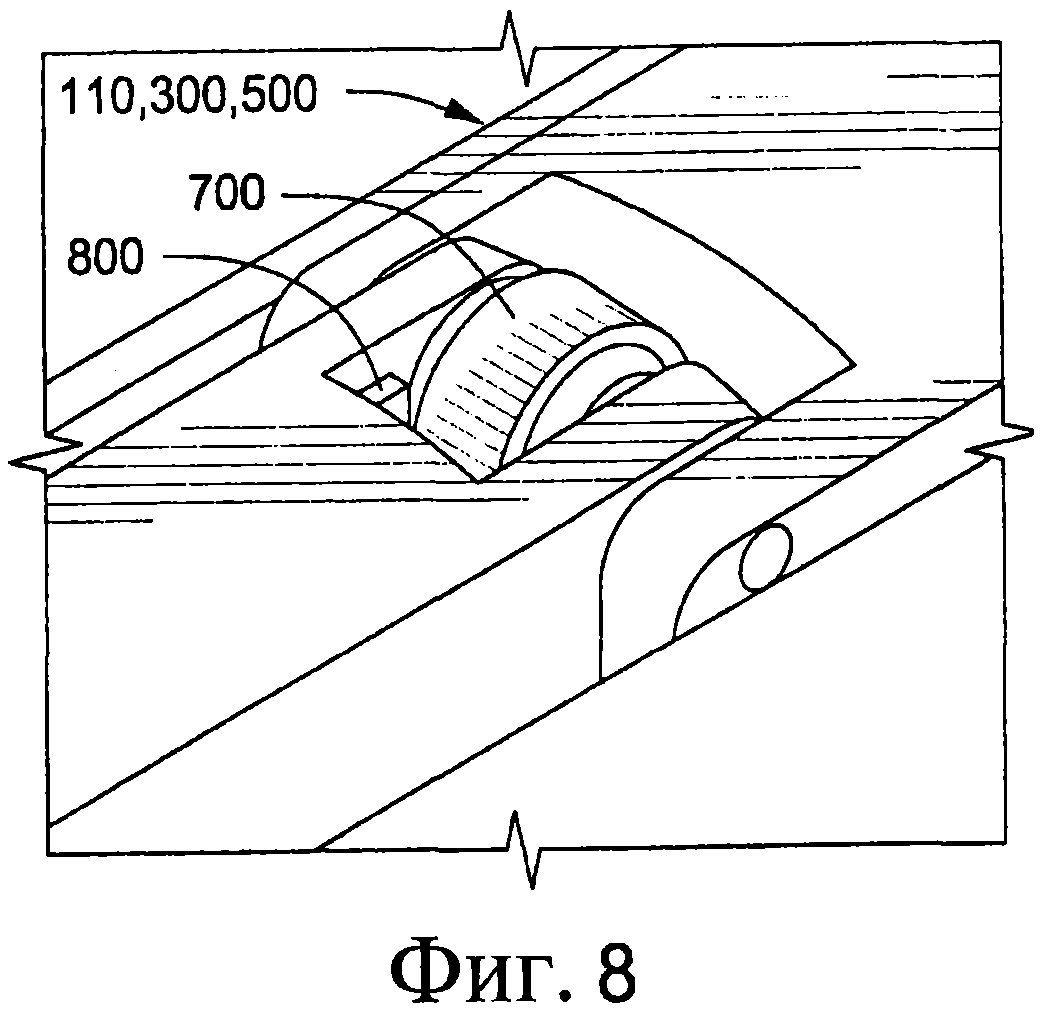
Фигура 8 показывает иллюстративный датчик, расположенный непосредственно рядом с колесом на Фигуре 7, в соответствии с одним или более описанных вариантов воплощения.
Фигура 9 показывает другой иллюстративный узел датчика в соответствии с одним или более описанных вариантов воплощения.
Фигура 10 показывает другой иллюстративный узел датчика в соответствии с одним или более описанных вариантов воплощения.
Фигура 11 показывает вид поперечного сечения рабочего инструмента в первом, циркуляционном, положении в соответствии с одним или более описанных вариантов воплощения.
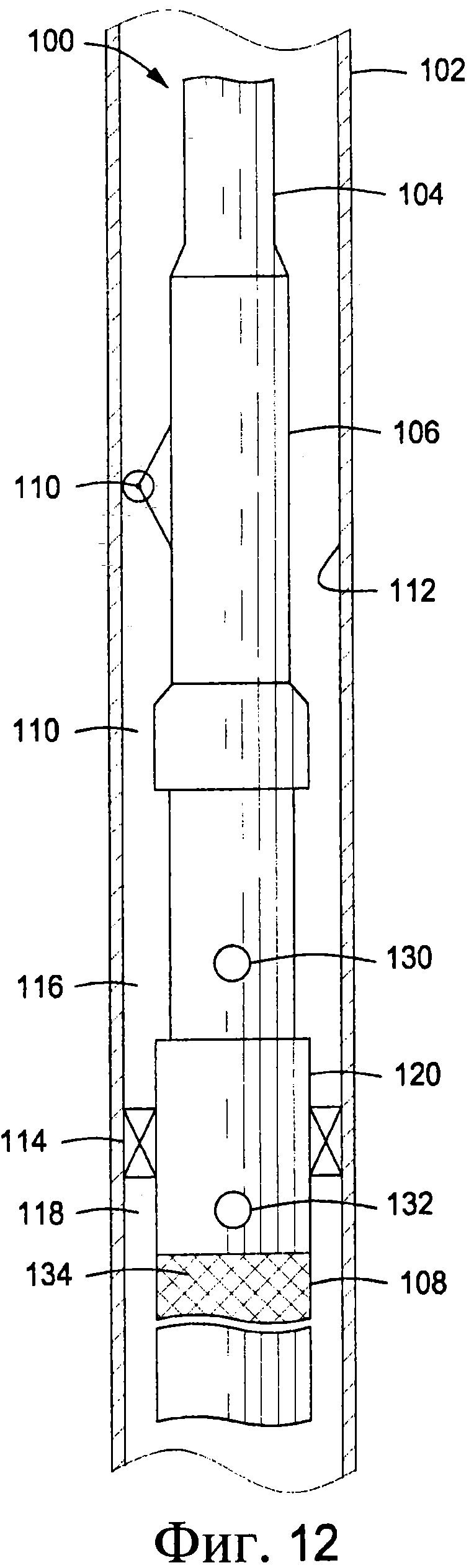
Фигура 12 показывает вид поперечного сечения рабочего инструмента во втором, реверсивном, положении в соответствии с одним или более описанных вариантов воплощения.
Фигура 13 показывает вид поперечного сечения другого иллюстративного узла датчика в соответствии с одним или более описанных вариантов воплощения.
Фигура 1 показывает вид поперечного сечения скважинного инструментального узла 100, имеющего узел датчика 110 в нерабочем положении, в соответствии с одним или более вариантов воплощения. Скважинный инструментальный узел 100 может включать рабочую колонну 104, рабочий инструмент 106 и нижний узел заканчивания скважины 108. Рабочая колонна 104 может быть соединена с рабочим инструментом 106 и адаптирована для перемещения рабочего инструмента 106 в осевом направлении и вращательно в пределах ствола скважины 102.
Рабочий инструмент 106 может включать один или более датчиков положения инструмента или узлов 110 датчиков (показан один), адаптированных для контроля положения рабочего инструмента 106 в стволе скважины 102. Если рабочий инструмент 106 включает множественные узлы 110 датчиков, узлы 110 датчиков могут быть смещены в осевом направлении и/или по окружности на рабочем инструменте 106. Узел 110 датчика на Фигуре 1 показан в нерабочем положении, означающем, что узел 110 датчика не контактирует со стенкой 112 ствола скважины 102. Как используется в этом документе, стенка 112 ствола скважины 102 может включать необсаженную стенку ствола скважины 102 или внутреннюю поверхность обсадной колонны, расположенной в стволе скважины 102.
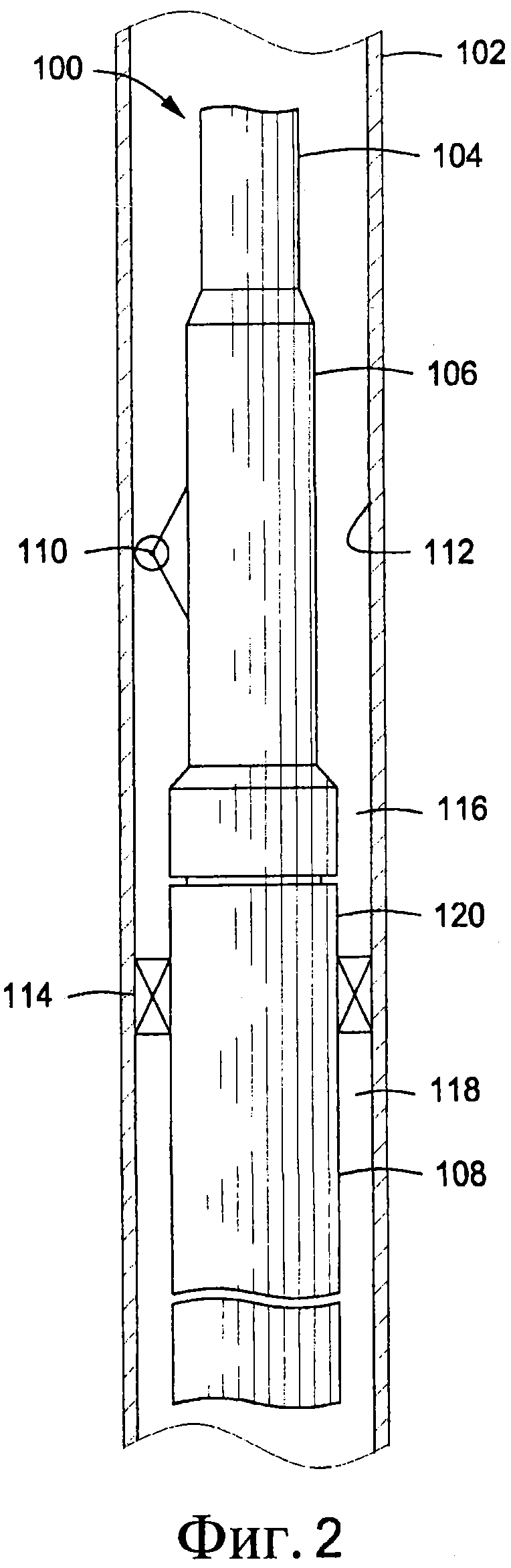
Фигура 2 показывает вид поперечного сечения скважинного инструментального узла 100, имеющего узел датчика 110 в рабочем положении, в соответствии с одним или более вариантов воплощения. Нижний узел заканчивания скважины 108 может включать один или более пакеров 114. По меньшей мере в одном варианте воплощения пакеры 114 могут быть пакерами для заполнения скважинного фильтра гравием. Когда нижний узел заканчивания скважины 108 опущен на требуемую глубину в скважину 102, пакеры 114 могут быть установлены, как показано на Фигуре 2, для закрепления на месте нижнего узла заканчивания скважины и изолирования первого верхнего межтрубного пространства 116 от второго нижнего межтрубного пространства 118.
После установки пакеров 114 узел датчика 110 может быть установлен в рабочее положение таким образом, что по меньшей мере часть узла датчика 110, например, колеса, как описано дополнительно ниже, будет контактировать со стенкой 112 ствола скважины 102. Узел датчика 110 может быть в рабочем положении, когда рабочий инструмент 106, опущенный в ствол скважины 102, управляется на глубине в стволе скважины 102, например, циркулируя или переходя в обратное положение, и/или вытягиваясь из ствола скважины 102. Например, узел датчика 110 может быть в нерабочем положении, когда рабочий инструмент 106 опускается в ствол скважины 102, и в рабочем положении, когда рабочий инструмент 106 управляется на глубине в стволе скважины 102 и вытягивается из ствола скважины 102. В другом варианте воплощения узел датчика 110 находится в нерабочем положении, когда рабочий инструмент 106 опускается в ствол скважины 102, в рабочем положении - во время работы рабочего инструмента 106 на глубине ствола скважины, и в нерабочем положении - когда рабочий инструмент 106 вытягивается из ствола скважины 102. Узел датчика 110 может быть установлен в рабочее положение посредством электродвигателя, соленоида, привода (включая электрический, гидравлический или электрогидравлический привод), привода с использованием таймера, пружины, давления в пределах ствола скважины 102 и т.п. Находясь в рабочем положении, узел датчика 110 может сохранять контакт со стенкой 112 скважины ствола 102 через пружину, клин, приводной механизм, винтовой натяжной механизм или т.п.
Узел датчика 110 может активироваться и выполнять измерения для контроля положения рабочего инструмента 106 в стволе скважины 102, когда узел датчика 110 переходит в рабочее положение, т.е. контактирует со стенкой 112, или узел датчика 110 может активироваться позже в предварительно определенное время. Например, узел датчика 110 может активироваться при достижении предварительно установленного значения давления или температуры или при получении сигнала (через кабель или беспроводным способом).
По меньшей мере в одном варианте воплощения после активации узла датчика 110, рабочий инструмент 106 может отделиться от нижнего узла заканчивания скважины 108 таким образом, что рабочий инструмент 106 может свободно двигаться в осевом направлении или вращательно в пределах ствола скважины 102 относительно неподвижного нижнего узла заканчивания скважины 108. Узел датчика 110 может быть адаптирован для выполнения измерений для контроля осевого или вращательного положения рабочего инструмента 106 во время опускания рабочего инструмента 106 в ствол скважины 102, во время его работы на глубине в стволе скважины 102 и/или вытягивании из ствола скважины 102.
Другой вариант воплощения узла датчика 110 может также выполнять измерение вращательного движения рабочего инструмента 106 относительно закрепленного нижнего узла заканчивания скважины 108 или точки отсчета 120 в стволе скважины 102. По меньшей мере в одном варианте воплощения рабочий инструмент 106 может быть отделен или отсоединен от закрепленного нижнего узла заканчивания скважины 108 посредством вращения рабочего инструмента 106 для его откручивания от нижнего узла заканчивания скважины 108. Узел датчика 110 может быть адаптирован для измерения как осевого, так и вращательного движения рабочего инструмента 106 относительно ствола скважины 102.
Положение рабочего инструмента 106 в пределах ствола скважины 102 может бать измерено относительно точки отсчета 120, занимающей известное положение в пределах ствола скважины 102. Например, точка отсчета 120 может быть расположена на неподвижном нижнем узле заканчивания скважины 108. По меньшей мере в одном варианте воплощения рабочий инструмент 106 может быть вытянут из ствола скважины 102 после его отделения от узла заканчивания скважины 108, и второй рабочий инструмент (не показан) может быть спущен в ствол скважины 102. Второй рабочий инструмент может также иметь узел датчика, соединенный с ним, и использовать точку отсчета 120 на нижнем узле заканчивания скважины 108.
Измерения могут быть обработаны в рабочем инструменте 106 и/или переданы оператору и/или в регистрирующее устройство на поверхности, используя проводную или беспроводную связь. Например, измерения могут передаваться через бурильную трубу, кабель в рабочей колонне 104, кабель в межтрубном пространстве 116, посредством акустических сигналов, электромагнитных сигналов, импульсной телеметрии в столбе бурового раствора или т.п. Измерения могут обрабатываться в рабочем инструменте 106 и/или передаваться на поверхность непрерывно или периодически для определения положения рабочего инструмента 106 в стволе скважины 102. По меньшей мере в одном варианте воплощения промежуток времени между обработкой и/или передачей измерений может быть от около 0,5 с до около 2 с, около 2 с до около 10 с, около 10 с до около 30 с, около 30 с до около 60 с (1 мин), от около 1 мин до около 5 мин, от около 5 мин до около 10 мин, от около 10 мин до около 30 мин или более.
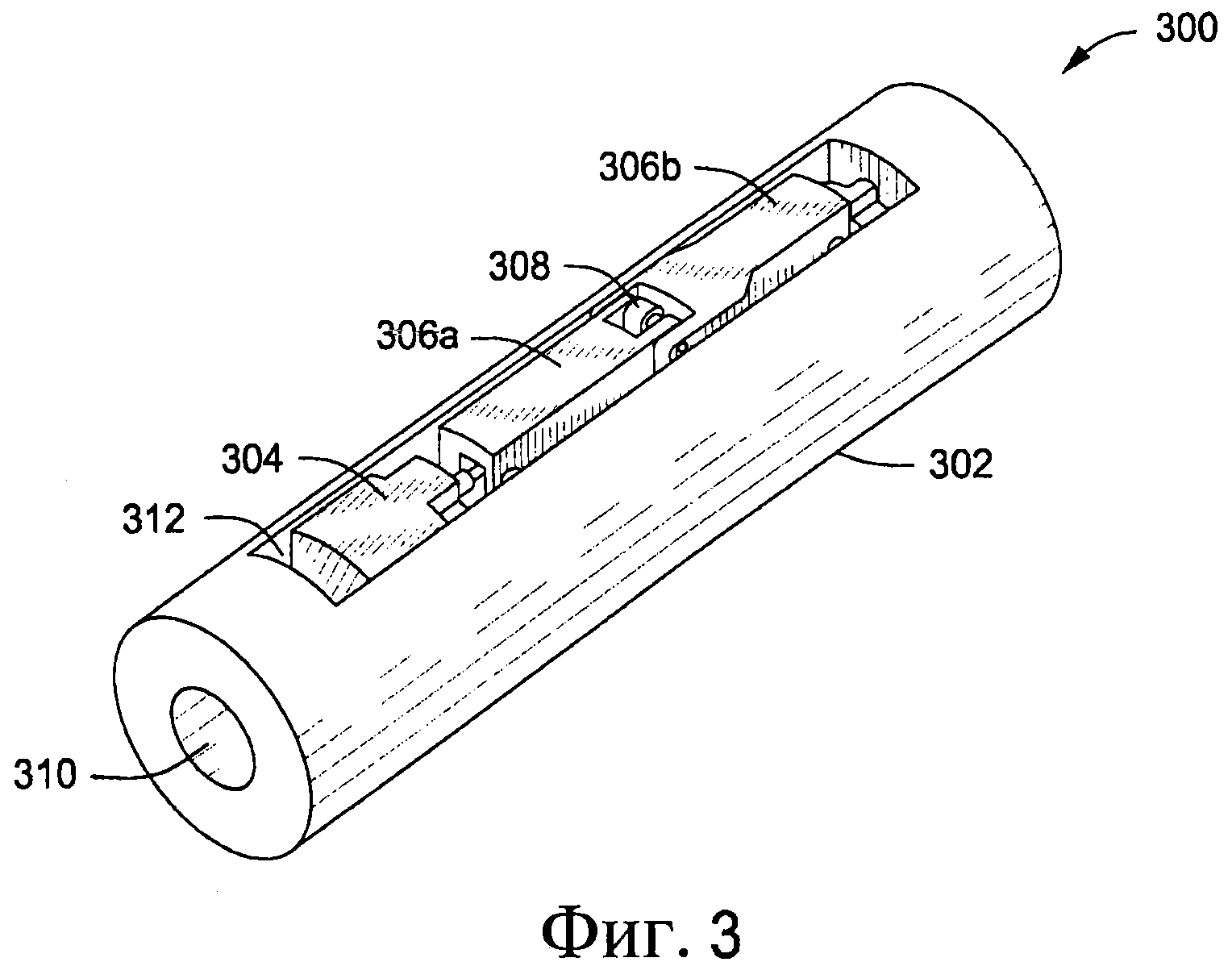
Фигура 3 показывает перспективный вид иллюстративного узла датчика 300 в нерабочем положении в соответствии с одним или более вариантов воплощения. Узел датчика 300 может включать корпус 302, электродвигатель 304, один или более рычагов (показано два) 306а, 306б, и одно или более колес (показано одно) 308. Корпус 302 может быть соединен или составлять одно целое с рабочим инструментом 106 (см. Фигуру 1). Корпус 302 может быть цилиндрическим с продольным отверстием 310, проходящим через него частично или полностью. Корпус 302 может также включать вырез 312, в котором расположены электродвигатель 304, рычаги 306а, 306б и колесо 308, когда узел датчика 300 в нерабочем положении, как показано на Фигуре 3.
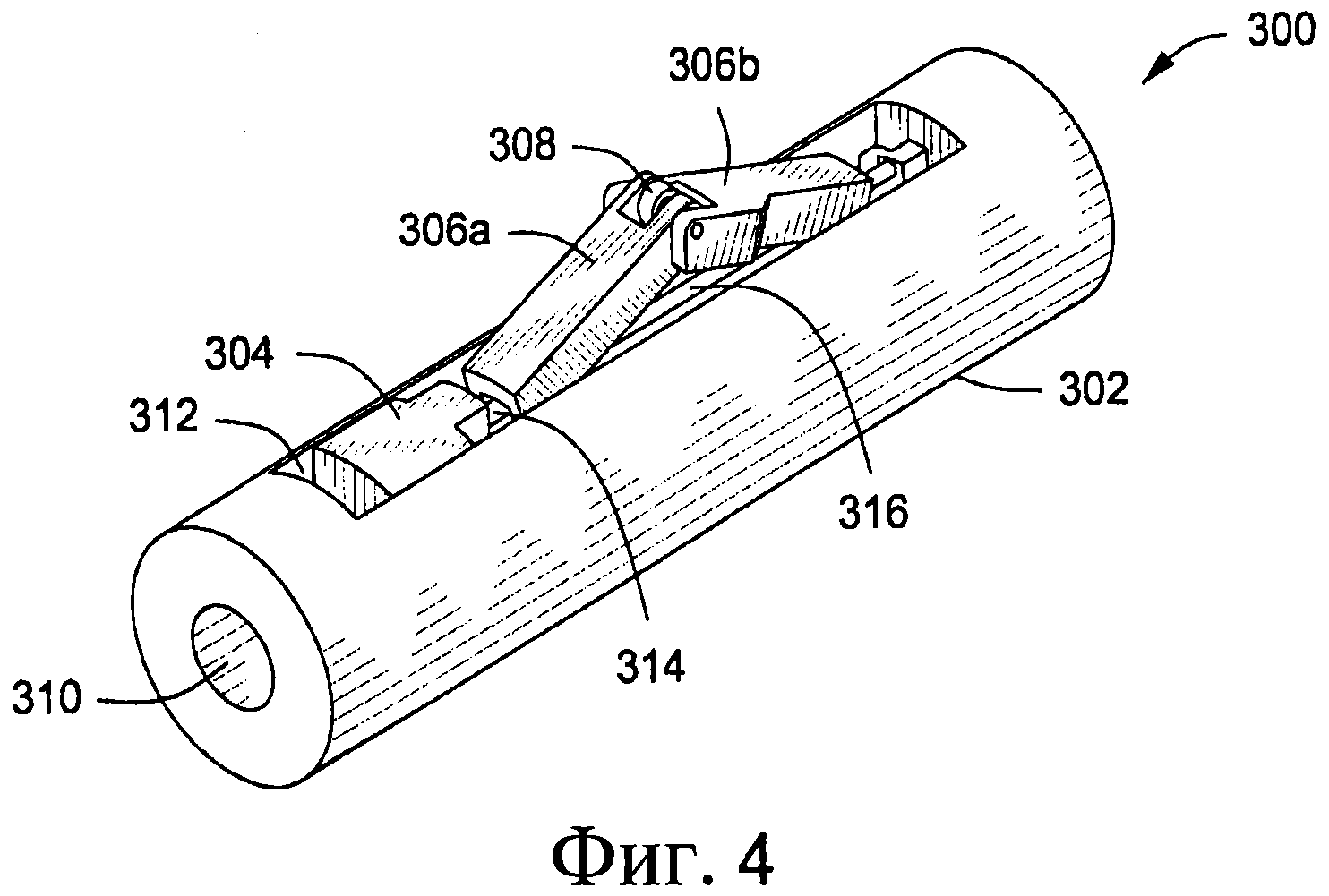
Фигура 4 показывает вид в перспективе иллюстративного узла датчика 300 на Фигуре 3 в рабочем положении в соответствии с одним или более вариантов воплощения. Для приведения узла датчика 300 в рабочее положение электродвигатель 304 должен перемещать винт 314 в осевом направлении вдоль вала 316, приводя к радиальному перемещению рычагами 306а, 306б колеса 308 в направлении стенки 112 ствола скважины 102 (см. Фигуру 1). После достижения контакта колеса 308 со стенкой 112 электродвигатель 304 может использоваться для управления усилием, прикладываемым к колесу 308 для сохранения контакта между колесом 308 и стенкой 112. Электродвигатель 304 также может быть использован для возврата колеса 308 обратно в нерабочее положение.
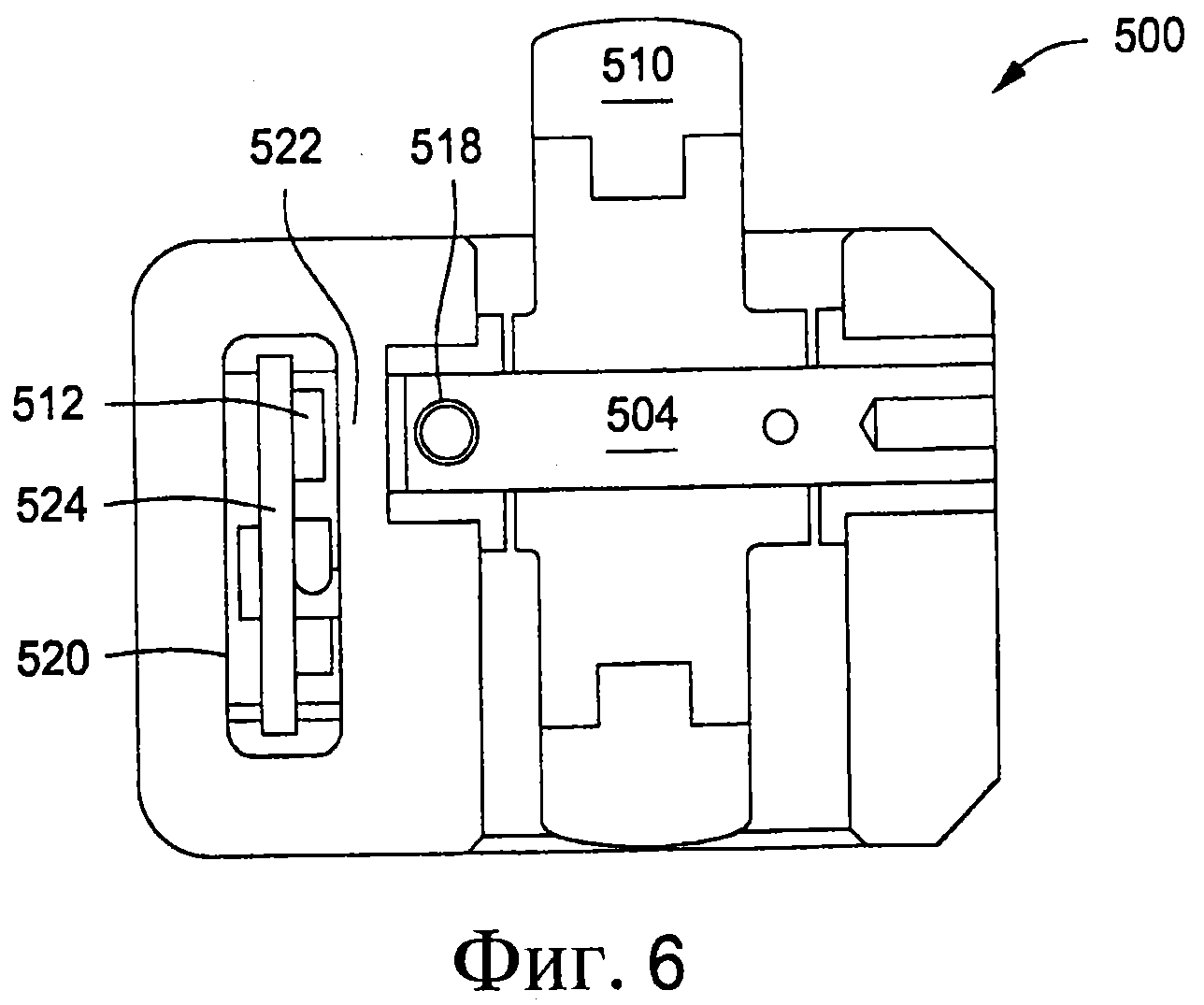
Фигура 5 показывает другой иллюстративный узел датчика 500, и Фигура 6 показывает вид поперечного сечения узла датчика 500 на Фигуре 5 в соответствии с одним или более вариантов воплощения. Узел датчика 500 может включать первую и вторую оси 502, 504, одну или более пружин (показана одна) 506, рычаг или коромысло 508, колесо 510 и один или более датчиков (показан один) 512. Первая ось 502 может проходить через первый конец 514 коромысла 508, и пружина 506 может быть расположена вокруг первой оси 502. Пружина 506 может быть адаптирована для приведения в действие и поддержания узла датчика 500 в рабочем положении.
Вторая ось 504 может быть соединена с колесом 510 и проходить через него рядом со вторым концом 516 коромысла 508. Находясь в рабочем положении, колесо 510 может быть адаптировано для качения по стволу скважины 102, т.е. качения по стенке 112 ствола скважины 102, по мере перемещения рабочего инструмента 106 в пределах ствола скважины 102 (см. Фигуру 1). Вторая ось 504 может быть адаптирована для прохождения такого же углового пути, какой проходит колесо 510, т.е. один оборот колеса 510 соответствует одному обороту второй оси 504.
По меньшей мере в одном варианте воплощения один или более магнитов (показан один) 518 могут быть расположены на или во второй оси 504 и/или колесе 510 таким образом, что магнит 518 адаптируется для поворота на такой же угол, на какой поворачивается колесо 510. При вращении магнита 504 магнитное поле, создаваемое магнитом 504, может меняться. Датчик 512 может быть расположен рядом с магнитом 504 и адаптирован для обнаружения или измерения изменений магнитного поля при вращении магнита 504. По меньшей мере в одном варианте воплощения датчик 512 может быть расположен в атмосферной камере 520. При этом стенка 522 может быть расположена между магнитом 518 и датчиком 512. Атмосферная камера 520 может быть герметичной для предотвращения попадания в нее текучей среды со ствола скважины 102.
Одна или более цепей (показана одна) 524 могут быть также расположены в пределах атмосферной камеры 520 и со связью с датчиком 512; однако, по меньшей мере в одном варианте воплощения датчик 512 и цепь 524 могут быть одним компонентом. Цепь 524 может быть адаптирована для получения измерений с датчика 512, соответствующих изменениям магнитного поля, и определения количества оборотов и/или частичных оборотов, выполненных колесом 510. Цепь 524 может затем измерять расстояние, пройденное рабочим инструментом 106 в стволе скважины 102 (см. Фигуру 1), на основании количества оборотов и/или частичных оборотов, выполненных колесом 510, как объясняется более подробно ниже.
Количество оборотов, выполненных колесом 510, и/или расстояние, пройденное рабочим инструментом 106, может быть передано оператору или в регистрирующее устройство на поверхности, используя проводную или беспроводную связь. Например, кабель или провод (не показан) может быть адаптирован для получения сигналов с датчика 512 и/или цепи 524 через перегородку 526. Кабель может проходить через канал 528 в коромысле 508 и выходить из отверстия 530 через конец 514 коромысла 508. По меньшей мере в одном варианте воплощения коромысло 508 может быть изготовлено из немагнитного материала. Например, коромысло 508 может быть изготовлено из металлического сплава, такого как один или более сплавов INCONEL®.
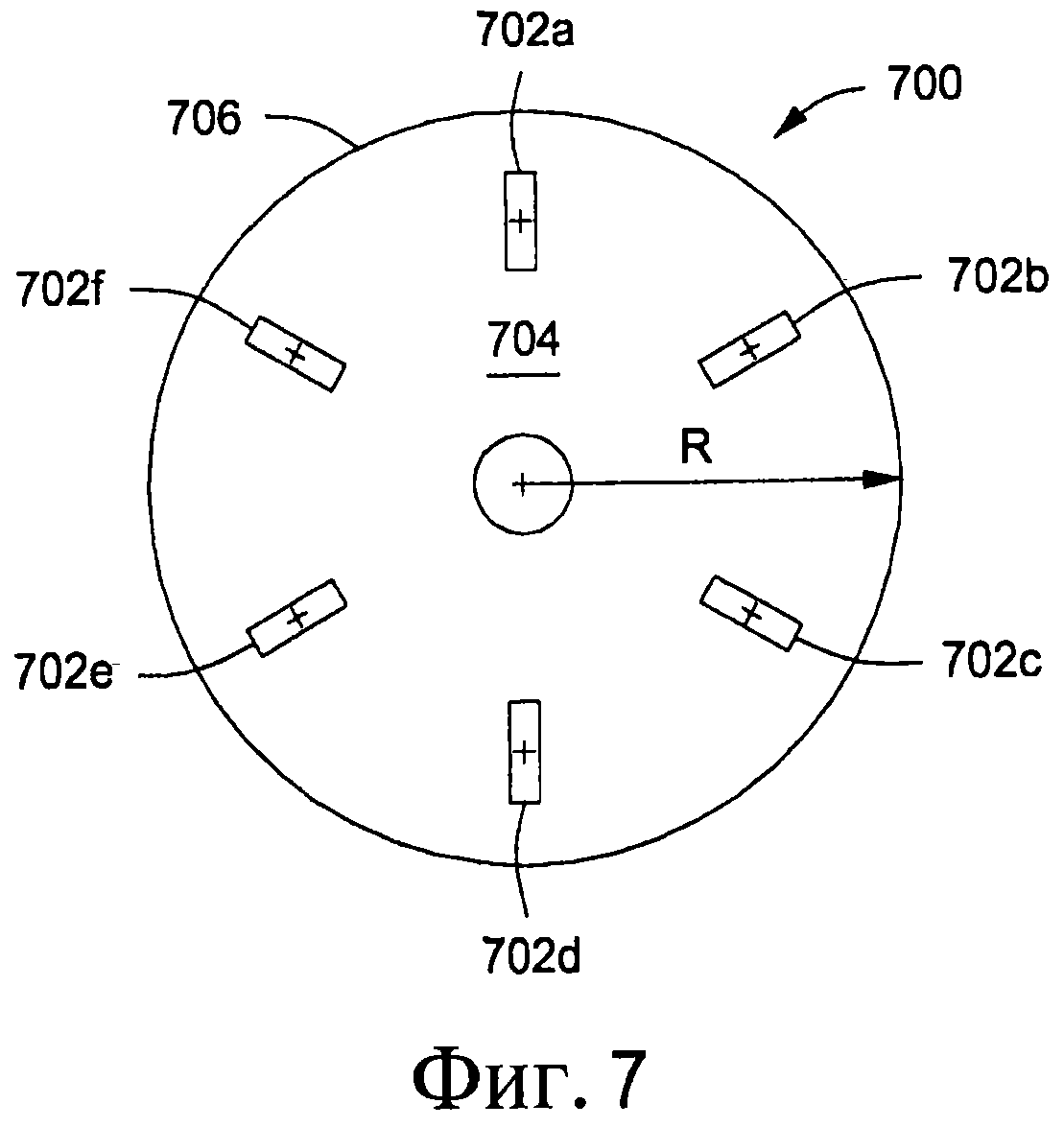
Фигура 7 показывает иллюстративное колесо 700, которое может быть соединено с узлом датчика 110, 300, 500 в соответствии с одним или более вариантов воплощения. Контактируя со стенкой 112 ствола скважины 102 (см. Фигуру 1), колесо 700 может быть адаптировано для качения по стволу скважины 102, когда рабочий инструмент 106 перемещается в пределах ствола скважины 102. При вращении колеса 700 осевой и/или угловой путь, пройденный рабочим инструментом 106, может быть измерен, например, датчиком 512 и/или цепью 524 на Фигуре 6. Полный оборот колеса 700 соответствует расстоянию, пройденному рабочим инструментом 106, вычисленному по следующей формуле:
D=2·π·R,
где D - расстояние, π - математическая константа "пи", R - радиус колеса 700. Скорость рабочего инструмента 106 в стволе скважины 102 может быть также вычислена, используя следующую формулу:
V=D/t,
где V - скорость, D - расстояние, t - время. Ускорение также может быть вычислено, по следующей формуле:
A=V/t,
где A - ускорение, V скорость, t - время.
Радиус R колеса 700 является известной величиной и может находиться в диапазоне от низкого значения около 0,5 см, около 1 см, около 2 см, около 3 см до высокого значения около 5 см, около 10 см, около 20 см, около 40 см или более. Например, радиус R колеса 700 может быть от около 1 см до около 3 см, от около 3 см до около 6 см, от около 6 см до около 10 см, от около 10 см до около 20 см.
Одна или более меток (показано шесть) 702a-f могут быть расположены в разных угловых положениях на колесе 700. По мере увеличения количества меток 702a-f точность измерения расстояния D также может повыситься. Расстояние D, пройденное рабочим инструментом 106, может быть вычислено по следующей формуле:
D=(2·π·R·S)/N,
где S - количество меток 702а-f, обнаруженных или посчитанных датчиком, например, датчиком 800 на Фигуре 8; N - общее количество меток 702а-f, расположенных на колесе 700. Например, если колесо 700 совершает полоборота, расстояние D, пройденное рабочим инструментом 106, равно (2·π·R·3)/6, так как примерное колесо 700 включает 6 меток, и 3 метки будут обнаружены или посчитаны при повороте колеса 700 на полоборота. Количество N меток 702а-f, расположенных на колесе 700, может находиться в диапазоне от низко значения около 1, около 2, около 3, около 4 или около 5 до высокого значения около 6, около 8, около 10, около 12, около 24 или более. Например, количество N меток 702а-f может быть от около 1 до около 12, от около 2 до около 10 или от около 4 до около 6.
Метки 702а-f могут быть расположены на боковой или осевой части 704 колеса 700, как показано, или метки 702а-f могут быть расположены на радиальной части 706 колеса 700. Например, метки 702а-f могут быть расположены в пределах одного или более вырезов (не показаны) на радиальной стороне 706 колеса 700 таким образом, что метки 702а-f не контактируют непосредственно со стенкой 112 ствола скважины 102 (см. Фигуру 1) при вращении колеса 700. По меньшей мере в одном варианте воплощения радиальная часть 706 колеса может включать покрытие или слой, имеющий высокий коэффициент трения, который предотвращает колесо 700 от скольжения или буксования при вращении колеса 700 вдоль стенки 112 ствола скважины 102. Покрытие или слой может также иметь высокую стойкость к износу для повышения долговечности.
Фигура 8 показывает иллюстративный датчик 800, расположенный рядом с колесом 700 на Фигуре 7, в соответствии с одним или более вариантов воплощения. Датчик 800 может быть расположен на узле датчика 110, 300, 500 таким образом, что датчик 800 неподвижный относительно вращающегося колеса 700. Дополнительно датчик 800 может быть расположен на узле датчика 110, 300, 500 таким образом, что датчик 800 может обнаруживать или считать метки 702а-f на колесе 700 по мере прохождения меток 702а-f мимо датчика 800 при вращении колеса 700. Таким образом, датчик 800 может быть расположен около стороны 704 колеса 700, если метки 702а-f расположены на стороне 704 колеса 700, как показано на Фигуре 7, или датчик 800 может быть расположен на радиальной части 706 колеса 700, если метки 702а-f расположены на радиальной части 706 колеса 700.
Связь между метками 702а-f и датчиком 800 может быть магнитной, механической, оптической или посредством прямого контакта. Например, метки 702а-f могут быть магнитами, как описано выше. В другом варианте воплощения метки 702а-f могут быть метками с радиочастотной идентификацией (РЧИ). Расстояние между датчиком 800 и метками 702а-f может находиться в диапазоне от низкого значения около 0 см (прямой контакт), около 0,1 см, около 0,2 см или около 0,3 см до высокого значения около 0,5 см, около 1 см, около 5 см, около 10 см или более. Например, расстояние между датчиком 800 и метками 702а-f может быть от около 0 см до около 0,2 см, от около 0,2 см до около 0,5 см, от около 0,5 см до около 1 см или от около 1 см до около 4 см.
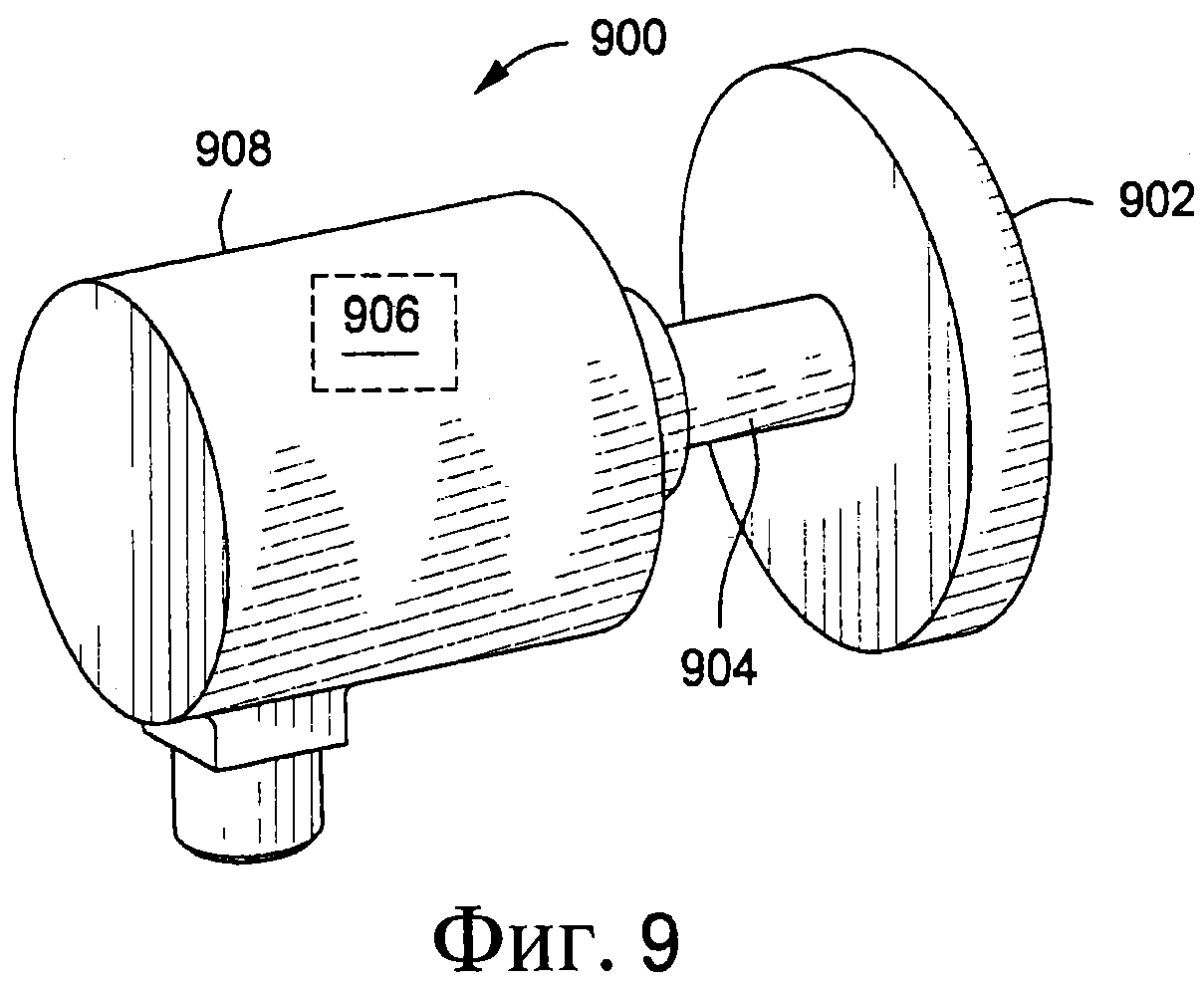
Фигура 9 показывает другой иллюстративный узел датчика 900 в соответствии с одним или более вариантов воплощения. Узел датчика 900 может включать колесо 902, вал 904 и датчик 906, расположенные в корпусе 908. В рабочем положении колесо 902 может находиться в контакте со стенкой 112 ствола скважины 102 (см. Фигуру 1) и адаптировано для вращения при перемещении рабочего инструмента 106 в пределах ствола скважины 102. Вал 904 может быть соединен с колесом 902 и адаптирован для прохождения такого же углового пути, какой проходит колесо 902. Вал 904 может быть связан с датчиком 906 в корпусе 908. Датчик 906 может измерять количество оборотов и/или частичных оборотов вала 904, которое может быть затем использовано для вычисления расстояния D, пройденного рабочим инструментом 106 в стволе скважины 102 (см. Фигуру 1). Датчик 906 может включать зубчатый счетчик, оптический шифратор, механический шифратор, контактный шифратор, круговой датчик положения, поворотный регулируемый дифференциальный преобразователь (ПРДП), синхронизатор, поворотный потенциометр и т.п.
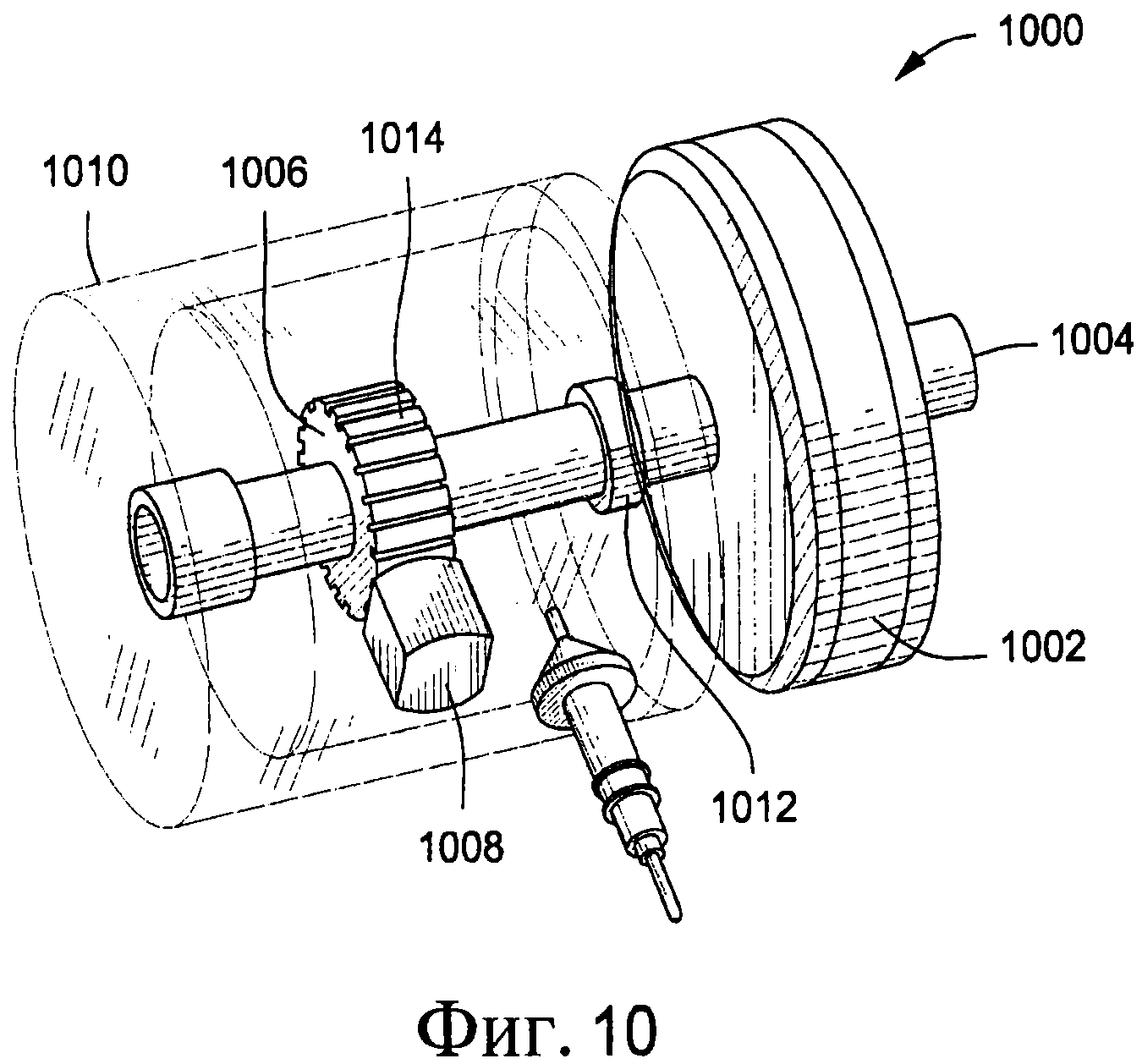
Фигура 10 показывает другой иллюстративный узел датчика 1000 в соответствии с одним или более вариантов воплощения. Узел датчика 1000 может включать колесо 1002, вал 1004, зубчатый механизм 1006, датчик 1008 и корпус 1010. В рабочем положении колесо 1002 может находиться в контакте со стенкой 112 ствола скважины 102 (см. Фигуру 1) и адаптировано для вращения при перемещении рабочего инструмента 106 в пределах ствола скважины 102. Вал 1004 может быть соединен с колесом 1002 и адаптирован для прохождения такого же углового пути, какой проходит колесо 1002. Зубчатый механизм 1006 и датчик 1008 могут быть расположены в корпусе 1010, и уплотнитель 1012, такой как вращающийся уплотнитель, может быть использован для предотвращения попадания текучей среды в корпус 1010.
Зубчатый механизм 1006 может быть соединен с валом 1004 и адаптирован для прохождения такого же углового пути, какой проходит вал 1004. Зубчатый механизм 1006 может включать один или более зубьев 1014, расположенных на внешней радиальной или осевой поверхности механизма. Количество зубьев 1014 может находиться в диапазоне от низкого значения около 1, около 2, около 4, около 5 или около 6 до высокого значения около 8, около 10, около 12, около 20, около 24 или более. Например, количество зубьев 1014 может находиться в диапазоне от около 1 до около 4, от около 4 до около 8, от около 8 до около 12 или от около 12 до около 24.
Датчик 1008 может находиться в прямом или непрямом контакте с зубчатым механизмом 1006 и адаптирован для обнаружения или счета количества зубьев 1014, проходящих при вращении зубчатого механизма 1006. Это измерение может использоваться для вычисления расстояния D, пройденного рабочим инструментом 106 в стволе скважины 102. Это измерение может использоваться также для вычисления скорости V и/или ускорения A рабочего инструмента 106 в скважине 102. По меньшей мере в одном варианте воплощения зубчатый механизм 106 может находиться в прямом контакте со стенкой 112 ствола скважины 102, и датчик 1008 может быть расположен снаружи, т.е. не в корпусе 1010.
Фигура 11 показывает вид поперечного сечения рабочего инструмента 106 в первом циркуляционном положении в соответствии с одним или более вариантов воплощения. После установки пакеров 114 и при рабочем положении и активном состоянии узла датчика 110 рабочий инструмент 106 может быть отделен от нижнего узла заканчивания скважины 108. После отделения подъемные устройства бурового оборудования (не показаны) могут перемещать рабочий инструмент 106 в пределах ствола скважины 102. При перемещении рабочего инструмента 106 узел датчика 110 может измерять расстояние, пройденное рабочим инструментом 106 в стволе скважины 102. Например, пройденное расстояние может соответствовать количеству оборотов колеса 308, 510, 700, 902, 1002 в узле датчика 110. Положение рабочего инструмента 106 в стволе скважины 102 затем может быть определено относительно неподвижной точки отсчета 120.
По меньшей мере одно (1) расстояние, пройденное рабочим инструментом 106, и (2) положение рабочего инструмента 106 может быть передано оператору или в регистрирующее устройство на поверхности. После того как расстояние, пройденное рабочим инструментом 106, и/или положение рабочего инструмента 106 известны, оператор или регистрирующее устройство может перемещать рабочий инструмент 106 в точные местоположения в пределах скважины ствола 102. Например, рабочий инструмент 106 может быть перемещен в первое, циркуляционное, положение для совмещения одного или более кроссоверных портов 130 (см. Фигуру 12), расположенных в рабочем инструменте 106, с одним или более портами оснащения 132, расположенными в нижнем узле заканчивания скважины 108.
Расстояние, на которое должен переместиться рабочий инструмент 106, например, расстояние между портами 130, 132, когда рабочий инструмент 106 отделяется от нижнего узла заканчивания скважины 108, может быть известной величиной. Узел датчика 110 затем может измерить расстояние, пройденное рабочим инструментом 106, для облегчения совмещения портов 130, 132. Например, расстояние между кроссоверным портом 130 и портом оснащения 132 может быть 1 м, когда рабочий инструмент 106 отделяется от нижнего узла заканчивания скважины 108. Если радиус R (также известная величина) колеса 308, 510, 700, 902, 1002 в узле датчика 110 равен 10 см (0,1 м), один оборот колеса 308, 510, 700, 902, 1002 соответствует пройденному расстоянию D, вычисленному по следующей формуле:
D=2·π·R=2·π·0,1=0,628 м.
Количество оборотов, которое колесо 308, 510, 700, 902, 1002 должно совершить при перемещении рабочего инструмента на 1 м, может быть вычислено по следующей формуле:
(0,628 м)/(1 оборот)=(1 м)/(X оборотов).
В этом примерном варианте воплощения Х равно около 1,6 оборота, и, таким образом, когда колесо 308, 510, 700, 902, 1002 совершает около 1,6 оборота, рабочий инструмент 106 перемещается на 1 м, и порты 130, 132 совмещаются.
После совмещения портов 130, 132 нижнее межтрубное пространство 118 может быть заполнено гравием. Состав для обработки, такой как гравийная пульпа, включающая смесь жидкого носителя и гравия, может подаваться через рабочий инструмент 106 через порты 130, 132 в нижнее межтрубное пространство 118 между одной или более сеток 134 в нижнем узле заканчивания скважины 108 и стенкой 112 скважины 102. Жидкий носитель гравийной пульпы может поступать обратно в рабочий инструмент 106, оставляя гравий в межтрубном пространстве 118. Гравий образует проницаемую массу или "набивку" между одной или более сеток 134 и стенкой 112 ствола скважины 102. Гравийная набивка позволяет буровой жидкости проходить через нее, в основном блокируя поток зернистого материала, например песка.
В определенное время, при использовании рабочего инструмента 106, рабочий инструмент 106 может двигаться в осевом направлении в пределах ствола скважины 102 вследствие действия на него различных факторов. Эти факторы могут включать давление, смещение рабочей колонны 104 и сжатие, или расширение рабочей колонны 104 вследствие изменений температуры. Например, во время циркуляционного процесса силы чистого давления на рабочий инструмент 106 могут толкать рабочий инструмент 106 вверх в стволе скважины 102. К этому перемещению вверх рабочего инструмента 106 может быть добавлено сжатие рабочей колонны 104 вследствие ее охлаждения при перекачивании. Узел датчика 110 может быть использован для определения положения рабочего инструмента 106 в стволе скважины 102 как в осевом, так и вращательном направлении, и, в ответ на определенное положение, дополнительный вес и/или вращение могут быть добавлены или убраны на поверхности для поддержания рабочего инструмента 106 в требуемом положении, например, для совмещения портов 130, 132. Контроль положения рабочего инструмента 106 и соответствующее изменение веса на поверхности могут быть использованы также для других операций, включая операции, когда рабочий инструмент 106 находится в положениях вторичного отделения, захвата, подачи уплотнителя или реверса.
Фигура 12 показывает вид поперечного сечения рабочего инструмента 106 во втором, реверсивном, положении в соответствии с одним или более вариантов воплощения. После циркуляции рабочей текучей среды рабочий инструмент 106 может перемещаться в пределах ствола скважины 102 в реверсивное положение, где кроссоверный порт 130 позиционируется выше пакеров 114. Например, расстояние между кроссоверным портом 130 и пакерами 114 может быть 2 м, и тогда оператор может решить, что рабочий инструмент необходимо переместить вверх на расстояние до 2,5 м для установки кроссоверного порта 130 над пакерами 114. Возвращаясь к примеру выше, где радиус R колеса равен 10 см, количество оборотов, которое колесо 308, 510, 700, 902, 1002 должно совершить для перемещения рабочего инструмента на 2,5 м, может быть вычислено по следующей формуле:
(0,628 м)/(1 оборот)=(2,5 м)/(X оборотов),
где X - количество оборотов колеса. Например, когда Х равно 4 оборотам и, таким образом, когда колесо 308, 510, 700, 902, 1002 совершает около 4 оборотов, рабочий инструмент 106 должен переместиться на 2,5 м, и кроссоверный порт 130 будет в требуемом положении выше пакеров 114.
При реверсивном положении давление может быть приложено к верхнему межтрубному пространству 116 для возврата гравийной пульпы, оставшейся в рабочем инструменте 106, обратно на поверхность. Высокое давление в верхнем межтрубном пространстве 116 может направлять оставшийся скважинный флюид в межтрубном пространстве 116 через порт 130, направляя этим гравийную пульпу в рабочем инструменте 106 на поверхность. При известном положении рабочего инструмента 106 перекачивание может быть начато сразу после установки рабочего инструмента 106 в реверсивное положение и до полного сброса давления в межтрубном пространстве.
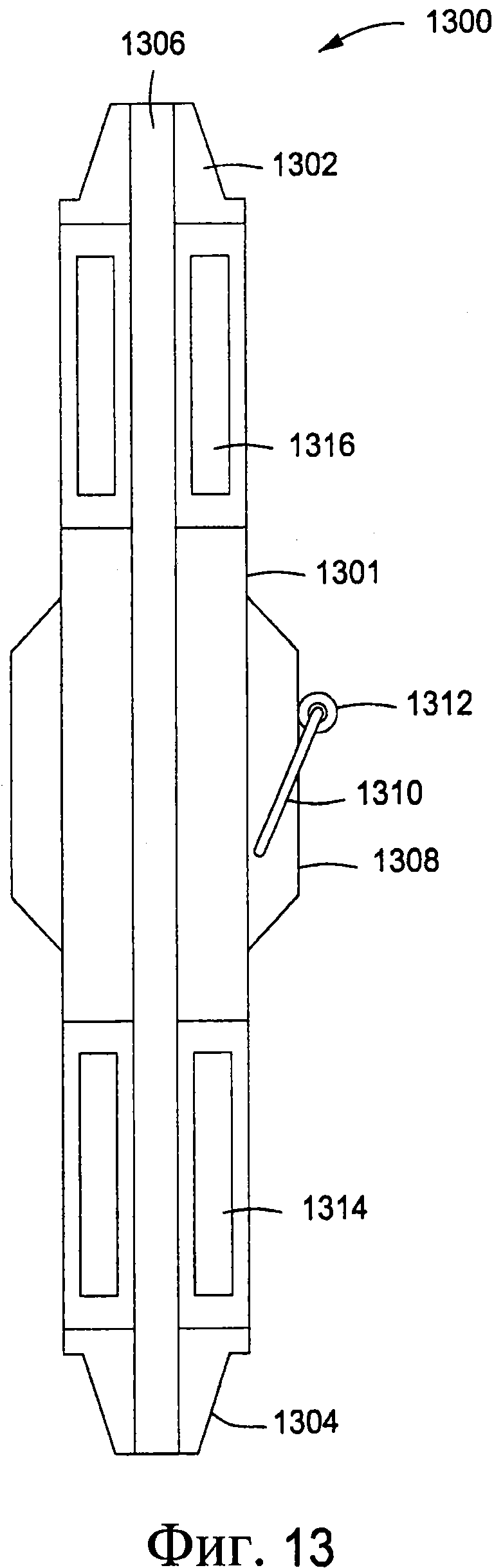
Фигура 13 показывает вид поперечного сечения другого иллюстративного узла датчика 1300 в соответствии с одним или более вариантов воплощения. Узел датчика 1300 может быть соединен или составлять одно целое с рабочим инструментом 106. Например, узел датчика 1300 может включать корпус 1301, имеющий первый и второй соединители 1302, 1304 адаптированные для соединения узла датчика 1300 с рабочим инструментом 106. Узел датчика 1300 может также включать отверстие 1306, проходящее через него частично или полностью. По меньшей мере часть узла датчика 1300 может включать отклонитель 1308, выходящий радиально за пределы остальной части узла датчика 1300.
Узел датчика 1300 может включать рычаг или коромысло 1310, имеющий соединенное с ним колесо 1312. Коромысло 1310 и колесо 1312 могут быть в основном подобны коромыслу 508 и колесу 510, описанным выше, и поэтому не будут снова подробно описываться. Один или более электронных компонентов 1314 могут быть расположены в корпусе 1301. Электронные компоненты 1314 могут включать одну или более схем, адаптированных для получения данных с колеса 1312, например количества оборотов. По меньшей мере в одном варианте воплощения электронные компоненты 1314 могут быть адаптированы для измерения расстояния, пройденного рабочим инструментом 106, на основании данных, полученных с колеса 1312. В другом варианте воплощения электронные компоненты 1314 могут быть адаптированы для расстояния, пройденного рабочим инструментом 106, и определения положения рабочего инструмента 106 в стволе скважины 102 на основании измерений расстояния. Как описывается выше, электронные компоненты могут быть адаптированы для передачи пройденного расстояния и/или положения рабочего инструмента 106 в стволе скважины оператору или в регистрирующее устройство на поверхности.
Одна или более батарей 1316 могут быть также расположены в корпусе 1301. Например, батареи 1316 могут образовывать кольцевой батарейный комплект в корпусе 1301. Батареи 1316 могут быть адаптированы для подачи питания к коромыслу 1310, электродвигателю, приводящему в действие коромысло 1310, электронным компонентам 1314 или другим скважинным устройствам.
Обращаясь снова к Фигурам 1, 2, 11 и 12, узел датчика 110 может быть использован для контроля и определения моментов времени начала перемещений, остановок или других перемещений рабочего инструмента 106 для более точного определения веса при подъеме, опускании или нейтрального веса на поверхности. Эти данные затем могут коррелироваться с моделями технического прогнозирования, в реальном времени или при статистическом согласовании после выполнения работы, для калибровки моделей. Калибровка может быть достигнута изменением одной или более переменных, таких как коэффициенты внутреннего трения при перекачивании текучей среды в обсадной колонне или в необсаженной части, пока прогноз не будет соответствовать фактическим измерениям.
Узел датчика 110, описанный здесь, может быть использован любым скважинным инструментом для измерения скважинных расстояний и определения скважинных положений. Например, узел датчика 110 может быть использован в центраторе, используемом в других инструментах, спускаемых в скважину на тросе, буровых и каротажных инструментах, толкателях и ловильных инструментах, которые используются, например, для создания журналов данных о смежной формации или картографирования смежной формации. Таким образом, положение скважинного инструмента может коррелироваться с журналами, картами и т.п.
Альтернативные технологии для измерения и контроля положения рабочего инструмента 106 в стволе скважины 102 могут включать акустические, магнитные или электромагнитные способы. Положение рабочего инструмента 106 может также измеряться и контролироваться с использованием линейного регулируемого дифференциального трансформатора, или троса, или кабеля, соединенного с рабочим инструментом 106. Например, один конец троса может быть соединен с рабочим инструментом 106, а другой конец - с неподвижным нижним узлом заканчивания скважины 108 или с пакерами 114. Трос может быть в натянутом положении при перемещении рабочего инструмента 106 в пределах ствола скважины 102. Таким образом, при перемещении рабочего инструмента 106 относительно неподвижного нижнего узла заканчивания скважины 108 или пакеров 114 длина троса может меняться. Длина троса может измеряться для определения положения рабочего инструмента 106 в стволе скважины 102. После завершения работы трос может быть освобожден или оторван от нижнего узла заканчивания скважины 108 или пакеров 114 для вытягивания рабочего инструмента 106 из ствола скважины 102.
В другом варианте воплощения узел датчика 110 может включать акустический датчик или трансивер, и точка отсчета 120 может включать метку. Метка 120 может быть расположена на неподвижном нижнем узле заканчивания скважины 108 или пакерах 114. Узел датчика 110 может быть адаптирован для передачи акустических сигналов и приема акустических сигналов с метки 120. Сигналы могут быть использованы для определения расстояния, пройденного рабочим инструментом 106 и/или положения рабочего инструмента 106 в стволе скважины 102. По меньшей мере одно пройденное расстояние и положение рабочего инструмента 106 затем может быть передано оператору или в регистрирующее устройство на поверхности, когда положение известно или определено (на основании пройденного расстояния), рабочий инструмент 106 может перемещаться в прецизионные положения в пределах ствола скважины 102.
Выше были определены различные термины. Относительно терминов, используемых в формуле изобретения и не определенных выше, для них должно использоваться самое широкое определение в этой области техники, при условии, что этот термин отражается по меньшей мере в одной печатной публикации или в выданном патенте. Кроме того, все патенты, процедуры испытаний и другие документы, цитируемые в этой заявке, полностью включаются путем ссылки в той мере, в какой такое раскрытие не противоречит этой заявке и всем юрисдикциям, в которых такое включение разрешено.
В то время как описание выше относится к вариантам воплощения настоящего изобретения, другие и дополнительные варианты воплощения изобретения могут рекомендоваться без отклонения от базового объема изобретения, а объем изобретения определен следующей формулой изобретения.

Гибкий соединитель для бурения с погружным пневмоударником
Электродвигатель и связанная с ним система для размещения в среде на забое скважины (варианты)
Разделение нефти, воды и твердых частиц внутри скважины
Система расходомера и способ измерения количества жидкости в многофазном потоке с большим содержанием газовой фазы
Способ (варианты) и система для оптимизации операций изоляции диоксида углерода
Уточненные измерения пористости подземных пластов
Система, способ и установка для измерения многофазного потока
Система дозирования и смешивания проппанта
Способ обработки подземного пласта разлагаемым веществом
Содержащая частицы промывочная среда для очистки скважины
Система крепления катушки статора для не покрытых лаком статоров
Универсальный шарнир высокой нагрузки для скважинного роторного управляемого бурового инструмента
Механическая скользящая муфта
Система наземного оборудования на буровой скважине
Способы и устройство для получения характеристик нефтесодержащей текучей среды и варианты их применения
Способы и системы для скважинной телеметрии
Вискозиметры с вибрирующим проводом
Полисахаридный флюид для обработки приствольной зоны и способ обработки находящегося в недрах земли пласта
Интеллектуальная система заканчивания скважины для скважин, пробуренных с большим отклонением от вертикали
Гибкий соединитель для бурения с погружным пневмоударником

