Результат интеллектуальной деятельности: СПОСОБ ЭКСПЛУАТАЦИИ ПОДВОДНОЙ ЛОДКИ, А ТАКЖЕ ПОДВОДНАЯ ЛОДКА
Вид РИД
Изобретение
Изобретение относится к способу эксплуатации подводной лодки согласно ограничительной части пункта 1 формулы изобретения или к подводной лодке согласно ограничительной части пункта 8 формулы изобретения.
Пропульсивная система привода подводной лодки, описанная в патенте WO 2004/068694, содержит электрическую машину, выполненную в виде синхронной машины с ротором с возбуждением от постоянного магнита и со статором с установленной в нем статорной обмоткой, содержащей множество фаз обмотки, например 24 фазы обмотки. При этом для каждой из фазных обмоток имеется соответствующий отдельный однофазный вентильный преобразователь частоты для подпитки фазной обмотки электрическим током. При этом вентильные преобразователи частоты для подпитки фазных обмоток находятся внутри модульных вентильных преобразователей частоты и установлены на стенде преобразователя в осевом направлении между подшипниковыми щитами со сторон А и В. При этом вентильные преобразователи выступают в промежуточное пространство, образованное валом синхронной машины и несущей ротор втулкой ротора, прочно на скручивание закрепленной на валу.
Такие пропульсивные системы привода подводных лодок пользуются большой популярностью за свою большую компактность, за связанную с этим незначительную потребность в месте и за малые шумы, производимые при работе, и сбываются заявителем, например, под фирменным знаком «SINAVY Permasyn».
Однофазный вентильный преобразователь частоты, приданный каждой фазной обмотке, снабжается электроэнергией от источника питания постоянного тока. При этом каждый импульсный вентильный преобразователь частоты обычно содержит два полумоста, каждый с двумя полупроводниковыми переключателями. С помощью соответствующих устройств управления переключатели управляются таким образом, что на выходных зажимах импульсного вентильного преобразователя частоты и тем самым на подсоединенной там фазной обмотке устанавливается желательное напряжение. При этом выходное напряжение возникает как разностное напряжение выходных потенциалов обоих полумостов.
При этом двигатель имеет два рабочих режима или рабочих диапазона:
а) Первый рабочий режим для работы двигателя с оптимальным коэффициентом полезного действия и с акустически оптимальными шумами в режиме малых оборотов двигателя, когда две соответствующие фазные обмотки посредством добавочного дросселя включены последовательно и подпитываются от соответствующего полумоста импульсных вентильных преобразователей частоты, приданных обеим фазным обмоткам. В этом случае все схемы последовательного включения фазных обмоток, вытекающие из этого и подпитываемые постоянным напряжением от общего источника питания постоянного тока, снова в свою очередь включены параллельно друг другу.
б) Второй рабочий режим для работы на сравнительно больших оборотах и для больших приводных мощностей, когда все фазные обмотки подпитываются от соответствующего установленного внутри импульсного вентильного преобразователя частоты, и при этом все фазные обмотки, подпитываемые постоянным напряжением от источника питания постоянного тока, включены параллельно друг другу.
Электрическая схема такого переключения описана, например, в патентах ЕР 0334112 В1 и DE 3345271 А.
При этом определена рабочая точка, по достижении которой происходит переключение с первого режима работы на второй или наоборот. Рабочая точка может быть определена, например, пороговой величиной числа оборотов приводного двигателя, причем эта пороговая величина в свою очередь определена максимально допустимым номинальным током в схеме последовательного включения фазных обмоток.
Поскольку в случае судна или лодки приводная мощность и тем самым нагрузочный ток связаны с числом оборотов согласно характеристике винта, можно получить число оборотов, начиная с которого наступает превышение допустимого номинального тока.
Если двигатель находится в первом рабочем режиме и пороговая величина для числа оборотов превышается, приводной двигатель переключается устройством управления на второй рабочий режим. Если двигатель, наоборот, находится во втором рабочем режиме и пороговая величина для числа оборотов превышается, приводной двигатель переключается устройством управления со второго рабочего режима на первый.
Исходя из этого задачей настоящего изобретения при способе согласно ограничительной части пункта 1 формулы изобретения или при подводной лодке согласно ограничительной части пункта 8 формулы изобретения является достижение возможно более длительной работы двигателя в первом рабочем режиме, т.е. при оптимизации, например, в отношении коэффициента полезного действия и акустических шумов.
Решение задачи, относящейся к способу, удается согласно отличительной части пункта 1 формулы изобретения за счет того, что при надводном плавании подводной лодки для переключения выбирается иная рабочая точка, нежели чем при подводном плавании подводной лодки.
При этом за основу берется понимание того, что до сих пор рабочую точку для переключения приходилось получать по характеристике винта для надводного плавания, поскольку она имеет более крутой ход, чем характеристика винта для подводного плавания, и что таким образом она является «более критической», т.е. с увеличением числа оборотов приводит к большим токам в фазной обмотке, чем при подводном плавании. Однако при учете режима плавания подводной лодки могут учитываться, соответственно, связанные с этим разные характеристики винта для надводного и подводного плаваний и тем самым могут получаться рабочая точка для переключения при надводном плавании и отличная от нее рабочая точка для переключения при подводном плавании. Поскольку ход характеристики винта при подводном плавании является более пологим, чем ход характеристики винта при надводном плавании, существует диапазон числа оборотов, при котором двигатель в случае подводного плавания еще находится в первом рабочем режиме, однако в случае надводного плавания уже во втором рабочем режиме. Таким образом с помощью способа согласно изобретению в случае подводного плавания работа в первом рабочем режиме, т.е., например, при оптимизации в отношении коэффициента полезного действия и акустических шумов, может продлеваться. При этом особым преимуществом является то, что это возможно без необходимости в серьезных конструктивных изменениях двигателя.
Предпочтительно, первым рабочим режимом является режим, в котором приводной двигатель оптимизирован в отношении своего коэффициента полезного действия и своих акустических шумов.
Рабочий режим для переключения может быть особенно просто определен пороговой величиной числа оборотов приводного двигателя. Однако пороговые величины возможны также для других рабочих параметров.
Пороговая величина числа оборотов может быть получена по пороговой величине для максимально допустимого номинального тока за счет соответствующего числа последовательно включенных фазных обмоток, т.е. за счет схемы последовательного включения фазных обмоток, и по характеристике винта.
Режим плавания особенно просто может быть определен путем регистрации глубины погружения подводной лодки. Для этого в распоряжении имеются разные возможности, известные специалисту. Предпочтительно регистрация глубины погружения осуществляется системой автоматизации более высокого уровня иерархии.
В одном из конструктивно особенно простых вариантов осуществления фазные обмотки посредством двух соответствующих полумостов подсоединены к источнику питания постоянного тока.
Для простоты изготовления схемы последовательного включения соответствующего числа фазных обмоток два соответствующих полумоста из этих фазных обмоток могут быть соединены друг с другом коммутирующим элементом.
Решение задачи, относящейся к подводной лодке, согласно отличительной части пункта 8 формулы изобретения удается за счет того, что устройство управления выполнено таким образом, что во время надводного плавания подводной лодки оно выбирает иную рабочую точку для переключения, нежели чем при подводном плавании подводной лодки.
Согласно предпочтительной форме исполнения подводной лодки первым рабочим режимом является режим, в котором приводной двигатель оптимизирован в отношении своего коэффициента полезного действия и своих акустических шумов.
Предпочтительно рабочая точка определена пороговой величиной числа оборотов приводного двигателя.
Предпочтительно пороговая величина числа оборотов получается из пороговой величины максимально допустимого номинального тока с помощью последовательно включенных фазных обмоток и характеристики винта.
Фазные обмотки посредством двух соответствующих полумостов, предпочтительно, подсоединены к источнику питания постоянного тока.
Согласно другому предпочтительному варианту осуществления для последовательного включения соответствующего числа фазных обмоток два соответствующих полумоста их этих фазных обмоток соединяются друг с другом коммутирующим элементом.
Преимущества, указанные для способа согласно изобретению и его предпочтительных вариантов осуществления, относятся, соответственно, к подводной лодке согласно изобретению и к ее соответствующим предпочтительным формам исполнения.
Ниже изобретение, а также его другие предпочтительные варианты осуществления более подробно поясняются на примерах выполнения на фигурах, на которых
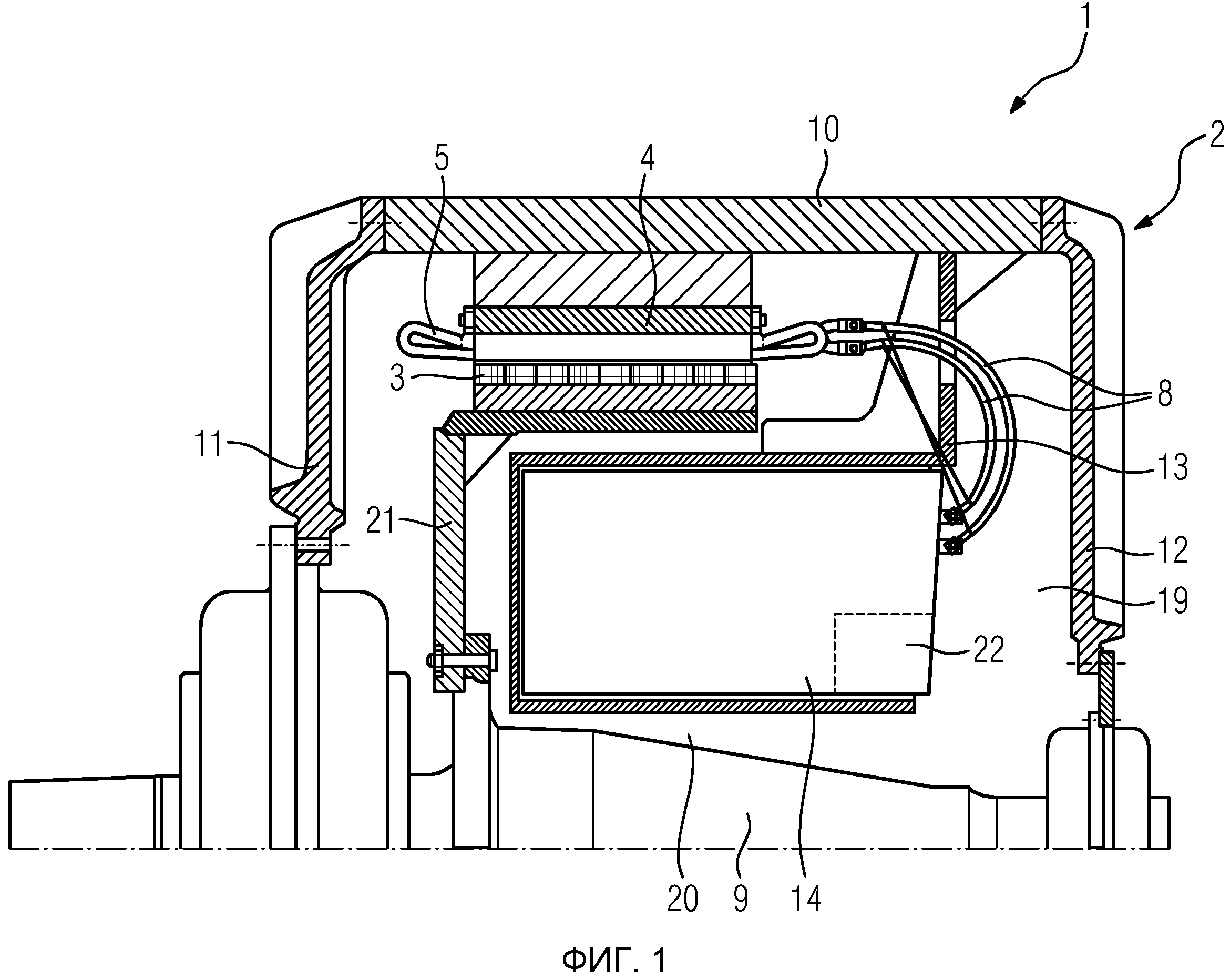
Фиг.1 изображает местный разрез принципиального варианта осуществления пропульсивной системы привода для подводной лодки с синхронной машиной с возбуждением от постоянного магнита и с импульсными вентильными преобразователями частоты, установленными в корпусе машины,
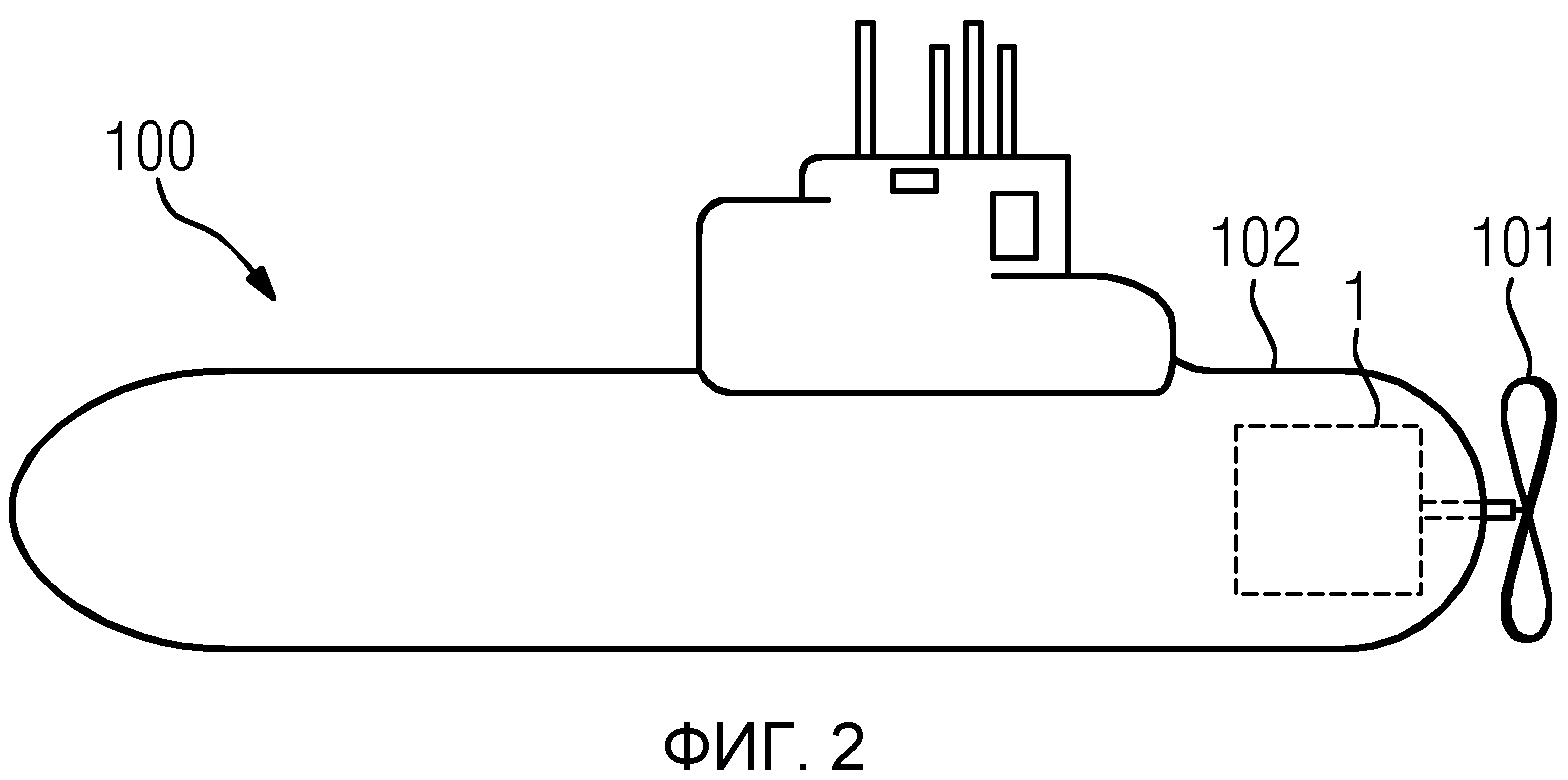
Фиг.2 - подводную лодку с пропульсивной системой привода на Фиг.1,
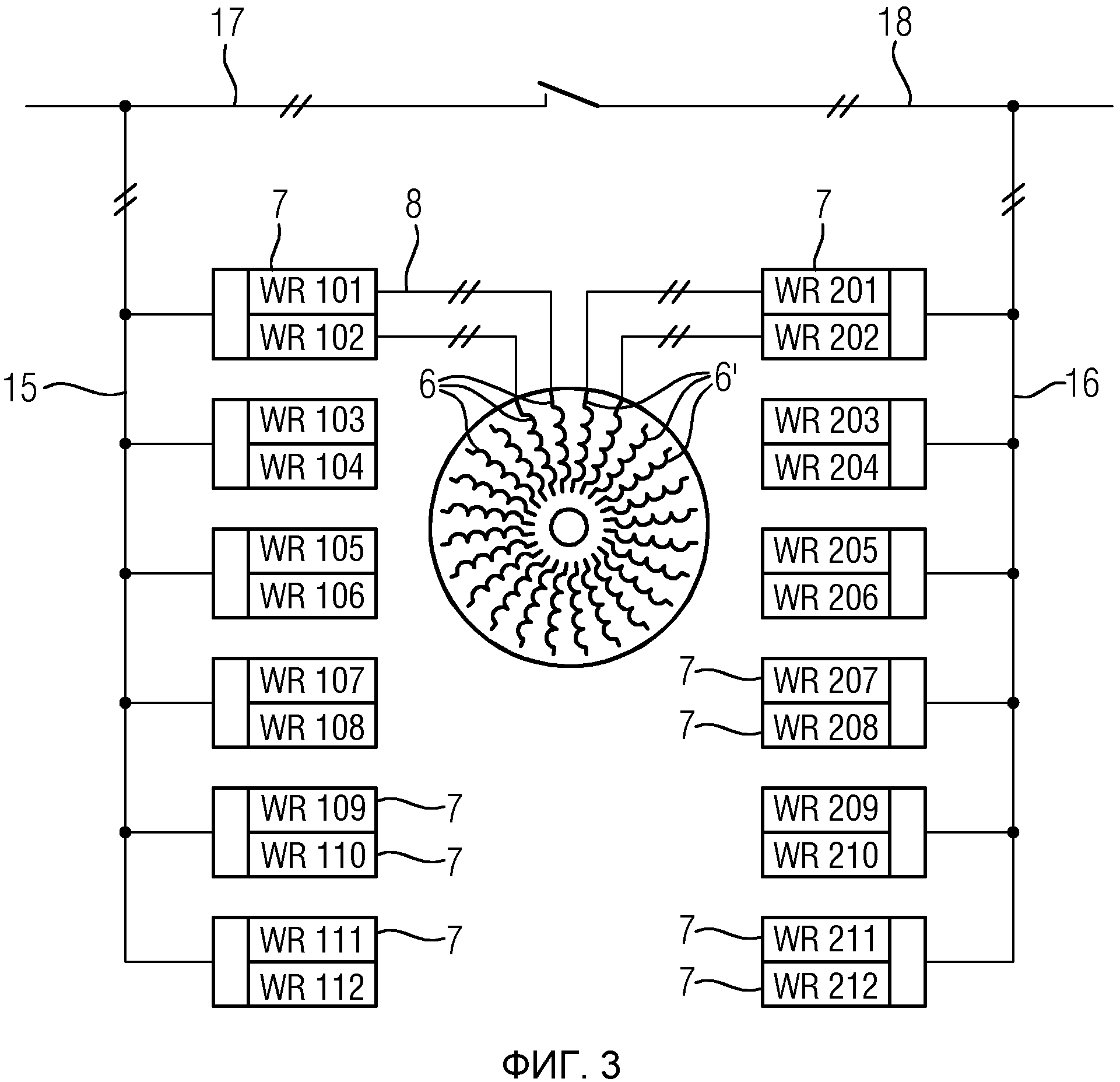
Фиг.3 - принципиальную схему расположения фазных обмоток и импульсных вентильных преобразователей частоты приводного двигателя на Фиг.1,
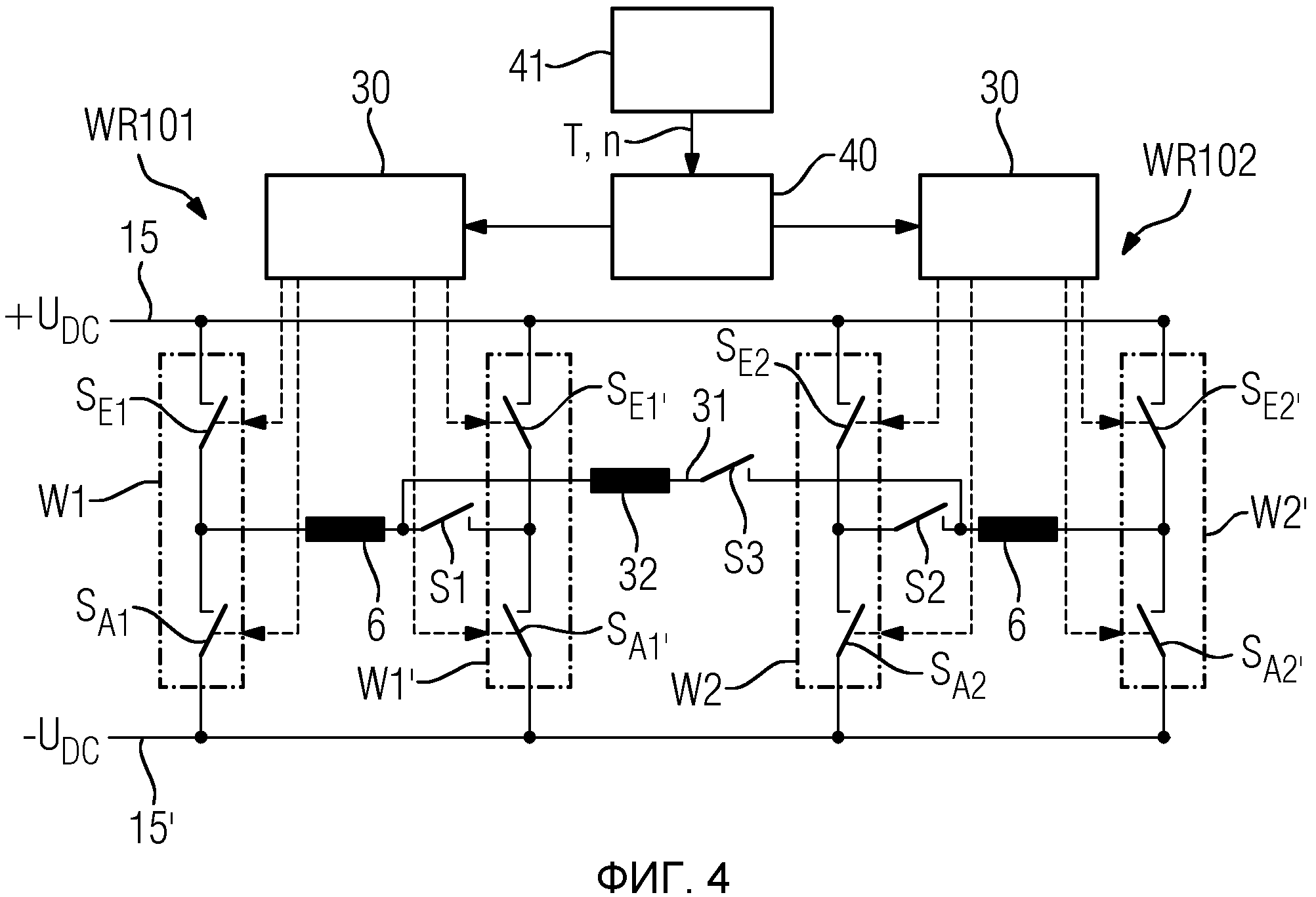
Фиг.4 - принципиальную схему питания двух фазных обмоток, включенных параллельно и последовательно, и
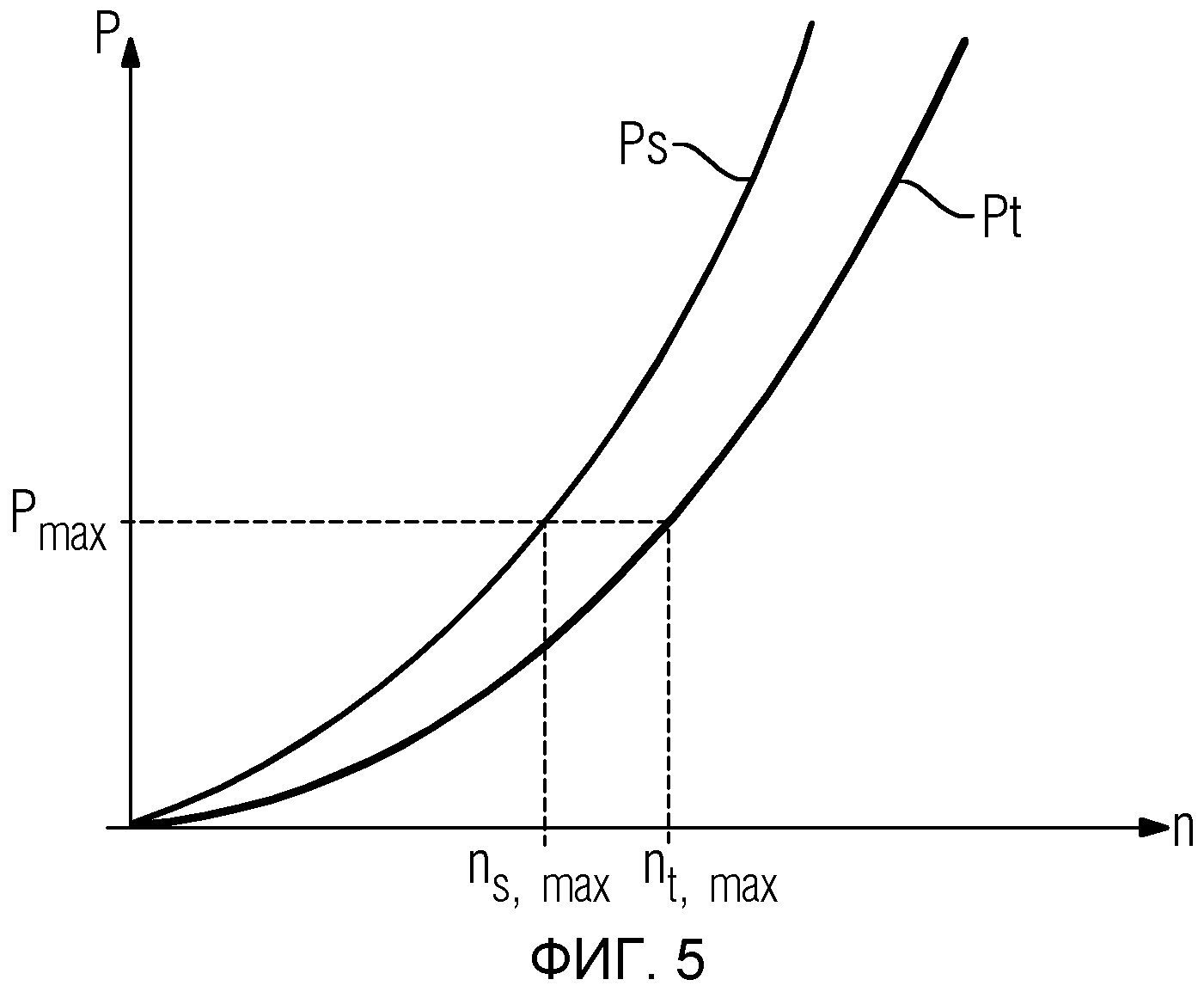
Фиг.5 - диаграмму с характеристиками винта для надводного и подводного плавания.
На Фиг.1 в принципиальном виде в местном разрезе изображена пропульсивная система 1 привода подводной лодки, которая, как показано на Фиг.2, обычно установлена в кормовой части 102 подводной лодки 100 и приводит во вращение винт 101 для привода подводной лодки 100. В случае подводной лодки 100 речь идет, например, об обычной подводной лодке с экипажем от 50 до 100 человек. Пропульсивная система 1 привода имеет, например, мощность 0,5-2 МВт.
Пропульсивная система 1 привода подводной лодки содержит выполненный в виде синхронной машины приводной двигатель 2 с ротором 3 с возбуждением от постоянного магнита и со статором 4 со статорной обмоткой 5. При этом статорная обмотка 5, как это, в частности, вытекает из принципиальной схемы на Фиг.3, делится на множество фазных обмоток 6, 6', из которых в случае стандартной обмотки 5, в принципе изображенной на Фиг.3, предусмотрены 24 фазных обмотки 6, 6'.
Приводной двигатель 2 содержит корпус 10 машины, окружающий внутреннее пространство 19, в котором установлены ротор 3 и статор 4. Корпус 10 машины формируется в осевом направлении, т.е. в направлении оси вращения вала 9 машины, подшипниковыми щитами 11 и 12 со сторон А и В.
При этом для каждой из фазных обмоток 6, 6' имеется соответствующий отдельный импульсный вентильный преобразователь 7 частоты для подпитки соответствующей фазной обмотки 6, 6' электрическим током (см. Фиг.3). При этом подсоединение каждой отдельной фазной обмотки 6, 6' к приданному ей вентильному преобразователю 7 частоты осуществляется посредством соединительных проводов 8.
Вентильные преобразователи 7 частоты, питающие статорную обмотку 5, установлены внутри двигателя 2 между подшипниковыми щитами 11 и 12 со сторон А и В на стенде 13 преобразователя и находятся в преобразовательных модулях 14. При этом преобразовательные модули 14 выступают в промежуточное пространство 20, образованное между валом 9 двигателя 2 и прочно на скручивание закрепленной на нем колоколообразной втулкой 21 ротора, несущей ротор 3. Вместо колоколообразной втулки 21 ротора может быть использована также Т-образная втулка ротора, образующая по обе стороны вала 9 ротора соответствующее промежуточное пространство 20, в которое выступают преобразовательные модули 14.
В примере выполнения, изображенном на Фиг.3, в один преобразовательный модуль 14 собраны по два вентильных преобразователя 7 частоты, выполненных в качестве инверторов, а именно вентильные преобразователи WR101 и WR102, WR103 и WR104, WR105 и WR106, WR107 и WR108, WR109 и WR110, WR111 и WR112, WR201 и WR202, WR203 и WR204, WR205 и WR206, WR207 и WR208, WR209 и WR210, WR211 и WR212.
Шесть преобразовательных модулей 14 для подпитки фазных обмоток 6 подключены посредством предусмотренной для них соединительной линии 15 к части 17 сети источника питания постоянного тока подводной лодки, здесь - бортовой сети постоянного тока подводной лодки. Шесть преобразовательных модулей 14 для подпитки фазных обмоток 6' подсоединены посредством предусмотренной для них соединительной линии 16 к части 18 сети источника питания постоянного тока.
Вместо двух вентильных преобразователей 7 частоты в каждом модульном преобразователе 14 частоты в один преобразовательный модуль 14 могут быть сведены более двух вентильных преобразователя 7 частоты.
При этом двигатель имеет один первый рабочий режим, при котором каждые две фазные обмотки 6 и 6' соединены последовательно, и второй рабочий режим, при котором все фазные обмотки 6 и 6' соединены параллельно друг другу.
В принципиальной схеме на Фиг.4 изображена подпитка двух соответствующих фазных обмоток 6 в качестве примера для вентильных преобразователей частоты WR101 и WR102. Соответствующая функциональность имеет место и для других вентильных преобразователей частоты или пар вентильных преобразователей частоты системы 1 привода.
Вентильные преобразователи частоты WR101 и WR102 с помощью токопроводящих и находящихся под напряжением линий 15, 15' с положительным потенциалом +UDC и с отрицательным потенциалом -UDC подсоединены к источнику питания постоянного тока.
Однофазные импульсные вентильные преобразователи частоты WR101 и WR102 содержат по два соответствующих полумоста W1, W1' и W2, W2'. Каждый из полумостов W1, W1', W2, W2' содержит по одному полупроводниковому переключателю (например, в виде биполярного транзистора с изолированным затвором) установленному, соответственно, во входной и выходной ветвях. В случае полумостов W1 и W1' это переключатели SE1 и SA1, SE1' и SA1', соответственно. В случае полумостов W2 и W2' это переключатели SE2 и SA2, SE2' и SA2', соответственно. При этом индекс «Е» означает переключатель, установленный во входной ветви, а индекс «А» переключатель, установленный в выходной ветви.
Посредством соответствующего подходящего устройства 30 управления для каждого из вентильных преобразователей частоты WR101, WR102 переключатели SE1, SA1, SE1', SA1' и SE2, SA2, SE2', SA2', соответственно, управляются таким образом, чтобы на выходных зажимах вентильных преобразователей WR101 и WR102 частоты и тем самым на соответствующих подключенных там фазных обмотках 6 устанавливалось желательное напряжение.
При этом фазная обмотка 6, относящаяся к вентильному преобразователю WR101 частоты, посредством переключателя S1 отключается от второго полумоста W1' вентильного преобразователя WR101 частоты, а фазная обмотка 6, сама по себе относящаяся к вентильному преобразователю WR102 частоты, посредством переключателя S2 отключается от первого полумоста W2 вентильного преобразователя WR102 частоты. Кроме того, посредством переключателя S3 фазная обмотка 6, относящаяся к вентильному преобразователю WR101 частоты, по цепи 31, в которую включен добавочный дроссель 32, включается последовательно с фазной обмоткой 6, относящейся к вентильному преобразователю WR102 частоты. Таким образом обе фазные обмотки 6 по схеме последовательного включения могут снабжаться электрической энергией через первый полумост W1 первого вентильного преобразователя WR101 частоты и через второй полумост W2´ второго вентильного преобразователя WR102 частоты. Добавочный дроссель 32 служит для сглаживания тока во избежание высших гармоник и вызываемых ими моментов качания двигателя.
Посредством устройств 30 управления переключатели SE1, SA1, SE2', SA2' управляются таким образом, чтобы в схеме последовательного включения фазных обмоток 6 устанавливалось желательное напряжение.
Если обе фазные обмотки 6 работают по схеме последовательного включения, приводной двигатель для оптимизации коэффициента полезного действия и акустических шумов находится в первом рабочем режиме двигателя.
Если переключатели 3 разомкнуты, а переключатели S1 и S2 замкнуты, то каждая фазная обмотка 6 подпитывается через приданный ей вентильный преобразователь WR101 или WR102 частоты. В этом случае все фазные обмотки включены параллельно друг другу, а приводной двигатель 2 находится во втором рабочем режиме.
Устройство 40 управления служит для переключения приводного двигателя 2 с первого рабочего режима на второй или наоборот, когда приводной двигатель 2 достигает определенной рабочей точки. Для этого устройство 40 управления регистрирует с помощью автоматизированной системы подводной лодки 100 информацию о режиме плавания подводной лодки 100 (например, в виде информации о глубине Т погружения подводной лодки) и о числе n оборотов приводного двигателя и в зависимости от этой информации подает устройствам 30 управления вентильных преобразователей WR101 или WR102 частоты, а также переключателям S1, S2, S3 команды управления.
При этом устройство 40 управления выполнено таким образом, что при надводном плавании подводной лодки она имеет иную рабочую точку для переключения, нежели чем при подводном плавании подводной лодки.
Рабочая точка для переключения в примере выполнения определяется пороговой величиной числа оборотов приводного двигателя 2. Эта пороговая величина в свою очередь определяется допустимым номинальным током, протекающим через схему последовательного включения фазных обмоток 6. Допустимый номинальный ток в свою очередь в решающей степени определяется токовой нагрузкой на дроссель 32.
Как показано на Фиг.5, для судна или лодки приводная мощность Р и тем самым нагрузочный ток связаны с числом n оборотов приводного двигателя через характеристику винта. При этом через Ps обозначается характеристика винта для надводного плавания, а через Pt - характеристика винта для подводного плавания. Таким образом удается получать число оборотов, начиная с которого превышается максимально допустимый номинальный ток. Однако при этом учитывается, находится ли подводная лодка в подводном или надводном плавании. При надводном плавании на основе характеристики Ps винта при надводном плавании для максимальной приводной мощности Pmax, соответствующей максимальному току, при работе двигателя 2 в первом рабочем режиме получается максимальное число ns,max. Соответственно, при подводном плавании на основе характеристики Pt винта при подводном плавании для максимальной приводной мощности Pmax, соответствующей максимальному току, при работе двигателя 2 в первом рабочем режиме получается максимальное число nt,max. Пороговые величины ns,max и nt,max записываются в устройстве 30 управления. В этом случае для чисел n < ns,max или nt,max оборотов двигатель 2 находится в первом рабочем режиме, а в случае чисел n > ns,max или nt,max оборотов двигатель 2 находится во втором рабочем режиме.
Если двигатель 2 находится в первом рабочем режиме, устройство 40 управления в случае надводного плавания при увеличении чисел оборотов по достижении числа ns,max оборотов, а в случае подводного плавания по достижении числа nt,max оборотов вызывает переключение на второй рабочий режим.
Если двигатель 2, наоборот, находится во втором рабочем режиме, устройство 40 управления в случае надводного плавания при уменьшении чисел оборотов по достижении числа ns,max оборотов, а в случае подводного плавания по достижении числа nt,max оборотов вызывает переключение на первый рабочий режим, поскольку характеристика Ps винта для надводного плавания проходит круче, чем характеристика Pt винта для подводного плавания, nt,max > ns,max. Таким образом с учетом режима плавания подводной лодки 100 при подводном плавании для чисел оборотов в диапазоне от ns,max до nt,max еще обеспечивается работа в первом рабочем режиме, в то время как при надводном плавании она больше невозможна.
Вставка уплотнения вала
Единица рельсового подвижного состава, имеющая внутренний бак
Тормозное устройство для транспортного средства и транспортное средство, имеющее такого рода тормозное устройство
Устройство и способ для определения путевых информаций
Способ охлаждения турбинной ступени и газовая турбина, включающая в себя охлаждаемую турбинную ступень
Магнитоупругий датчик крутящего момента
Система и способ для конфигурирования интеллектуального электронного устройства
Способ снятия корпуса подшипника с ротора газовой турбины, а также трубчатый вал для продолжения ротора
Элемент жесткости для облицовочной панели
Способ предоставления предварительно определенной приводной характеристики в самолете и соответствующее приводное устройство
Многополюсная газоизолированная секция сборной шины
Устройство исполнительного элемента и способ установки положения линейно подвижного элемента
Электрическая машина
Предохранительная фрикционная муфта с автоматическим выключением при длительной перегрузке
Способ работы трехфазного инвертора питаемого вентильным преобразователем магнитного подшипника
Система трубопроводов для текучей среды, имеющая агрегат для подготовки текучей среды, и способ подготовки текучей среды, протекающей по трубопроводу для текучей среды, а также переходная сцепка, имеющая такого рода систему трубопроводов для текучей среды, и подвижной состав, снабженный такого рода переходной сцепкой
Динамоэлектрическая машина с самонесущим корпусом
Способ регулирования газовой турбины
Резонаторный глушитель шума для радиальной турбомашины, в частности, для центробежного компрессора
Гибридный самолет

