Результат интеллектуальной деятельности: СПОСОБ МОДЕЛИРОВАНИЯ ДОРОЖНЫХ ХАРАКТЕРИСТИК В РЕГИОНЕ, В КОТОРОМ ДВИЖЕТСЯ ТРАНСПОРТНОЕ СРЕДСТВО, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к системам управления транспортного средства, а именно к созданию и использованию модели уклона дорожного профиля и других характеристик дороги для оптимизации работы силового агрегата транспортного средства.
Уровень техники
Производители транспортных средств постоянно пытаются минимизировать расход топлива (например, увеличивая значение пройденного расстояния на единицу объема бензина для транспортных средств с бензиновыми двигателями или на единицу электрического заряда для транспортных средств с электрическими двигателями). Сильное влияние на топливную эффективность оказывает скорость, с которой движется транспортное средство, изменение уклона дороги на маршруте и дорожная обстановка. Системы автоматической регулировки скорости (то есть круиз-контроля) могут помочь повысить экономию топлива, уменьшая время на разгон транспортного средства, особенно при движении по шоссе. Однако, сохраняя постоянное значение скорости на подъемах и спусках, транспортное средство расходует больше топлива по сравнению с ситуацией, когда для оптимизации расхода топлива можно было бы изменять скорость, учитывая уклон дороги. Если знать будущее изменение уклона дороги заранее (например, на основании спутниковых карт и систем построения маршрута), то можно вводить временные изменения значения скорости, уменьшая расход топлива. Однако необходимость использования GPS-навигации и автомобильных картографических данных, расчетных данных и/или удаленных данных для определения таких изменений в режиме реального времени увеличивает стоимость транспортного средства, либо такие средства могут быть недоступны в некоторых областях. Следовательно, было бы желательно избежать использования таких средств при определении соответствующих изменений скорости.
Статья Kolmanovsky и др. «Оптимизированное управление скоростью при различных условиях движения и при различных уклонах дороги», 6-й Симпозиум организации IFAC по достижениям в сфере автоматизированного управления, Мюнхен, июль, 2010 г., которая включена в данный документ в качестве ссылки, описывает принцип управления, используемого транспортным средством в особых географических регионах для получения наилучшей средней производительности без получения подробной информации о маршруте или уклоне дороги. В данном варианте управления используется заранее установленное значение скорости транспортного средства для достижения оптимального соотношения между предполагаемым средним расходом топлива и предполагаемой средней скоростью движения. Параметры рельефа и условий движения указаны в матрице переходных вероятностей (ТРМ) модели марковской цепи в виде значений переходных вероятностей. Принцип управления задается заранее с помощью вероятностного динамического программирования (то есть вне транспортного средства на стадии его разработки с независимым определением характеристик рельефа местности), после чего загружается в транспортное средство для использования во время движения по соответствующей местности.
Статья McDonough и др. «Моделирование условий движения транспортного средства с использованием моделей переходных вероятностей», Мультиконференция IEEE по приложениям управления, Денвер, сентябрь, 2011 г., которая включена в данный документ в качестве ссылки, описывает использование дивергенции Кульбака-Лейблера (KL) между матрицами переходных вероятностей в моделях марковской цепи для определения похожих и непохожих условий движения. На основе матрицы ТРМ, соответствующей текущим условиям движения транспортного средства, дивергенцию KL можно использовать для изменения принципов управления, разработанных для дискретного множества типичных циклов движения для адаптации работы силового агрегата транспортного средства к условиям рельефа и дорожной обстановки.
Предложенные ранее системы сильно зависят от предварительного сбора данных (для описания различных регионов и условий движения) и анализа (для предварительного создания принципов управления и загрузки их в транспортное средство). Для оптимизации большого числа различных моделей транспортного средства для различных регионов и условий движения требуется более практичный подход. Система транспортного средства и способ для создания матриц ТРМ и соответствующих принципов управления на борту транспортного средства в режиме реального времени описаны в находящейся на рассмотрении заявке США на изобретение «Изменение параметра управления скоростью на борту транспортного средства в режиме реального времени».
Получение матрицы ТРМ, которая в точности отражает вероятности перехода в конкретном регионе, зависит от обработки огромного объема данных. Для выполнения такой обработки на борту транспортного средства крайне желательно эффективно использовать объем памяти и использовать только простые вычисления. Более того, желательно обеспечить надежное обнаружение движения транспортного средства между регионами, требующими построения различных матриц ТРМ для точной характеристики.
Раскрытие изобретения
Изобретение представляет исполнительное устройство для автоматического получения характеристик дороги/рельефа (например, уклона дороги или скорости движения транспорта) на борту транспортного средства без использования электронных баз данных топографической или другой информации о местности (например, GPS-карт, платформы «Electronic Horizon» или геоинформационной системы GIS). Основные функции данного исполнительного устройства включают в себя определение свойств рельефа на участке дороги, по которому движется транспортное средство, и объединение этих свойств в набор моделей, охватывающих характеристики рельефа местностей, пройденных транспортным средством. Исполнительное устройство определяет, когда собрано достаточно данных для описания региона, либо когда продолжающийся процесс сбора данных указывает на то, что транспортное средство вошло в другой регион.
В одном аспекте изобретения представлен способ моделирования уклона дороги в регионе, в котором движется транспортное средство. Во время движения транспортного средства по дороге с уклоном, который изменяется в диапазоне заданных значений, задается последовательность величин уклона при движении транспортного средства с заданной скоростью. Каждая величина уклона имеет соответствующий диапазон. Модель марковской цепи для уклона дороги обновляется в ходе последовательных значений уклона. При этом модель представляет соответствующие элементы вероятности в матрице событий перехода от каждого заданного диапазона уклона к следующему в последовательности диапазону. Каждый элемент матрицы имеет значение πi,j, представляющее собой взвешенную частоту переходов от первого соответствующего значения уклона ко второму значению, разделенное на взвешенную частоту переходов, вызванных первым значением уклона, так что матрица последовательно аппроксимирует характеристики дороги в этом регионе.
Краткое описание чертежей
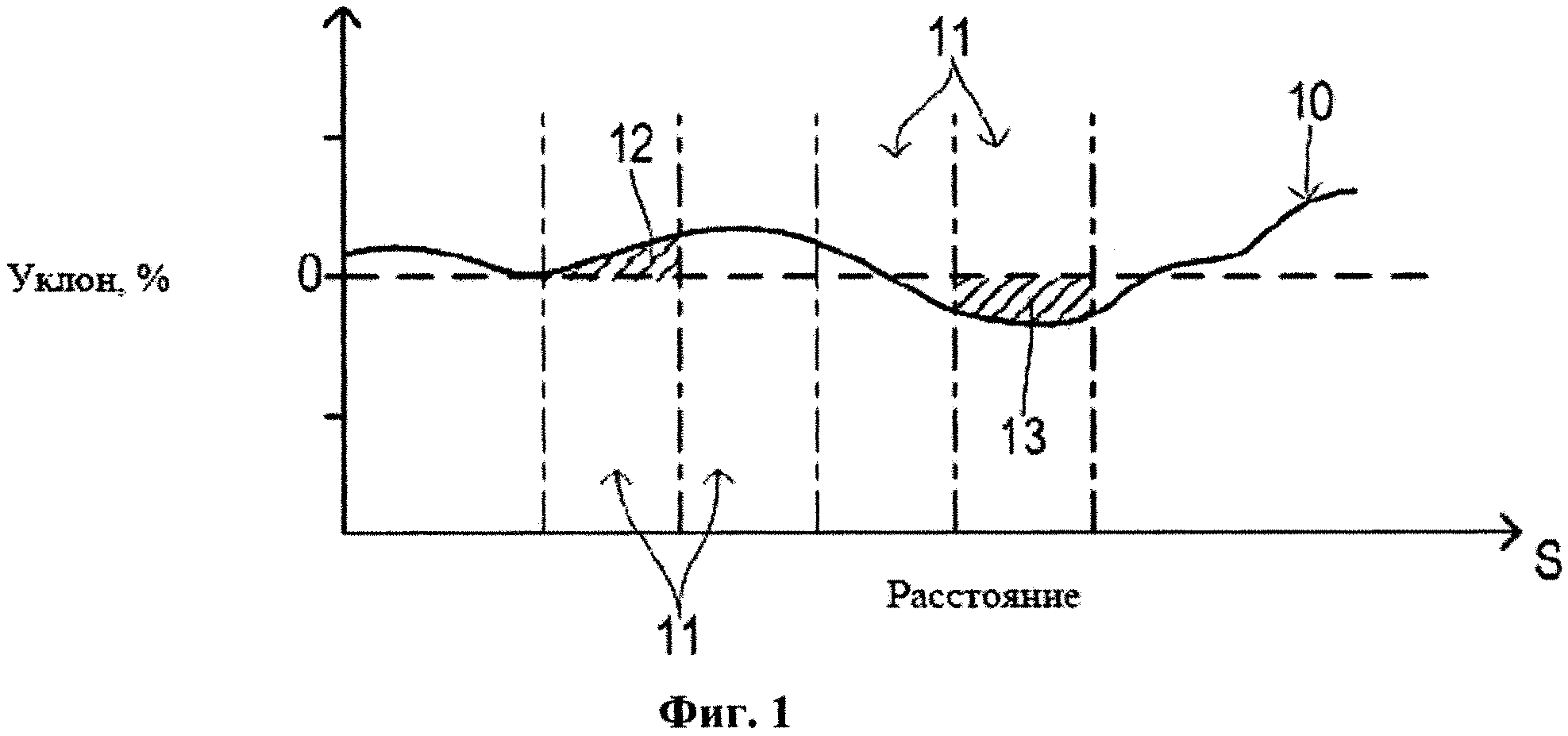
На Фиг.1 изображен график изменения уклона дороги, который преобразован в последовательные значения диапазона.
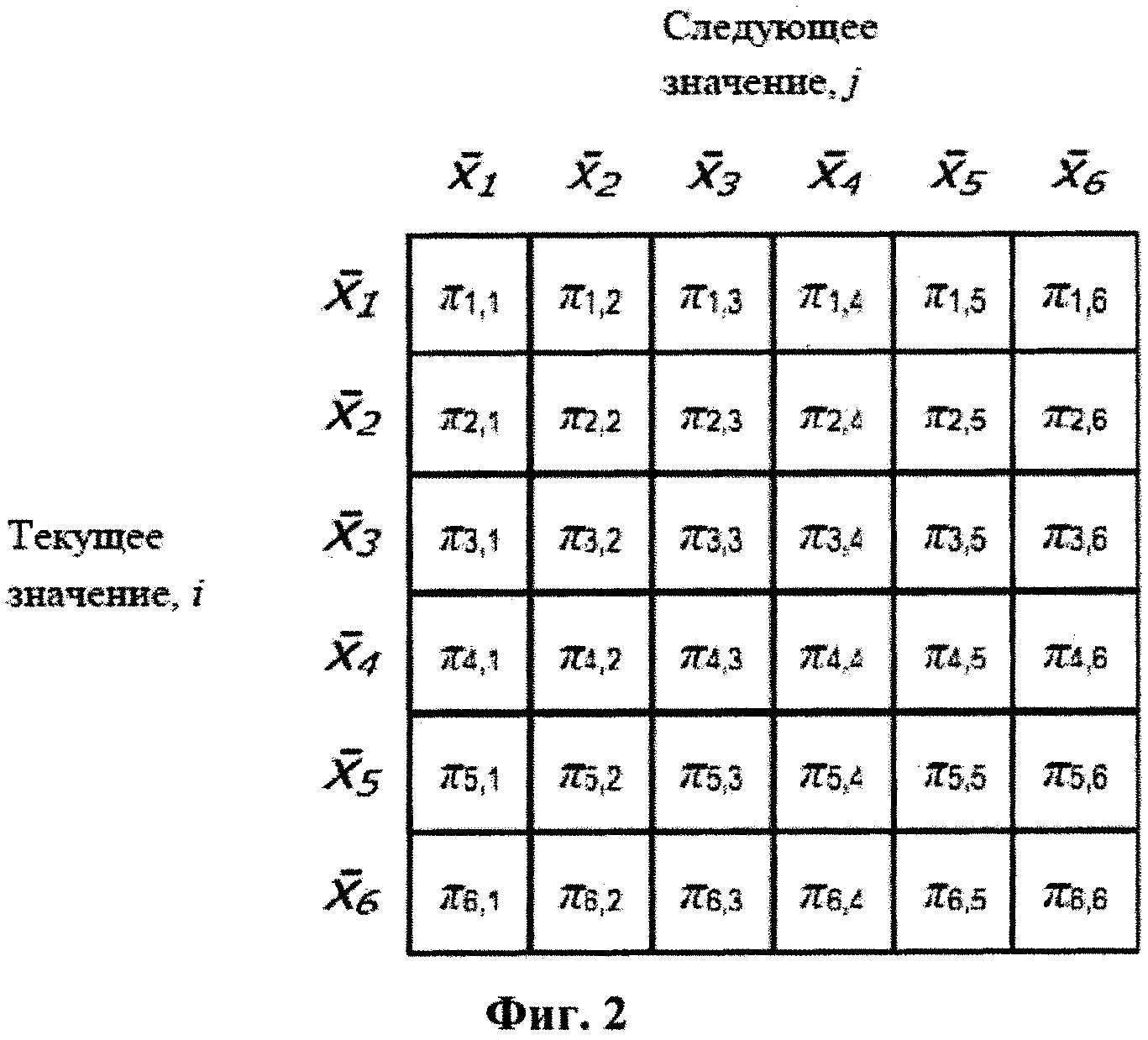
На Фиг.2 изображено матричное представление вероятностей перехода между последовательными значениями диапазона.
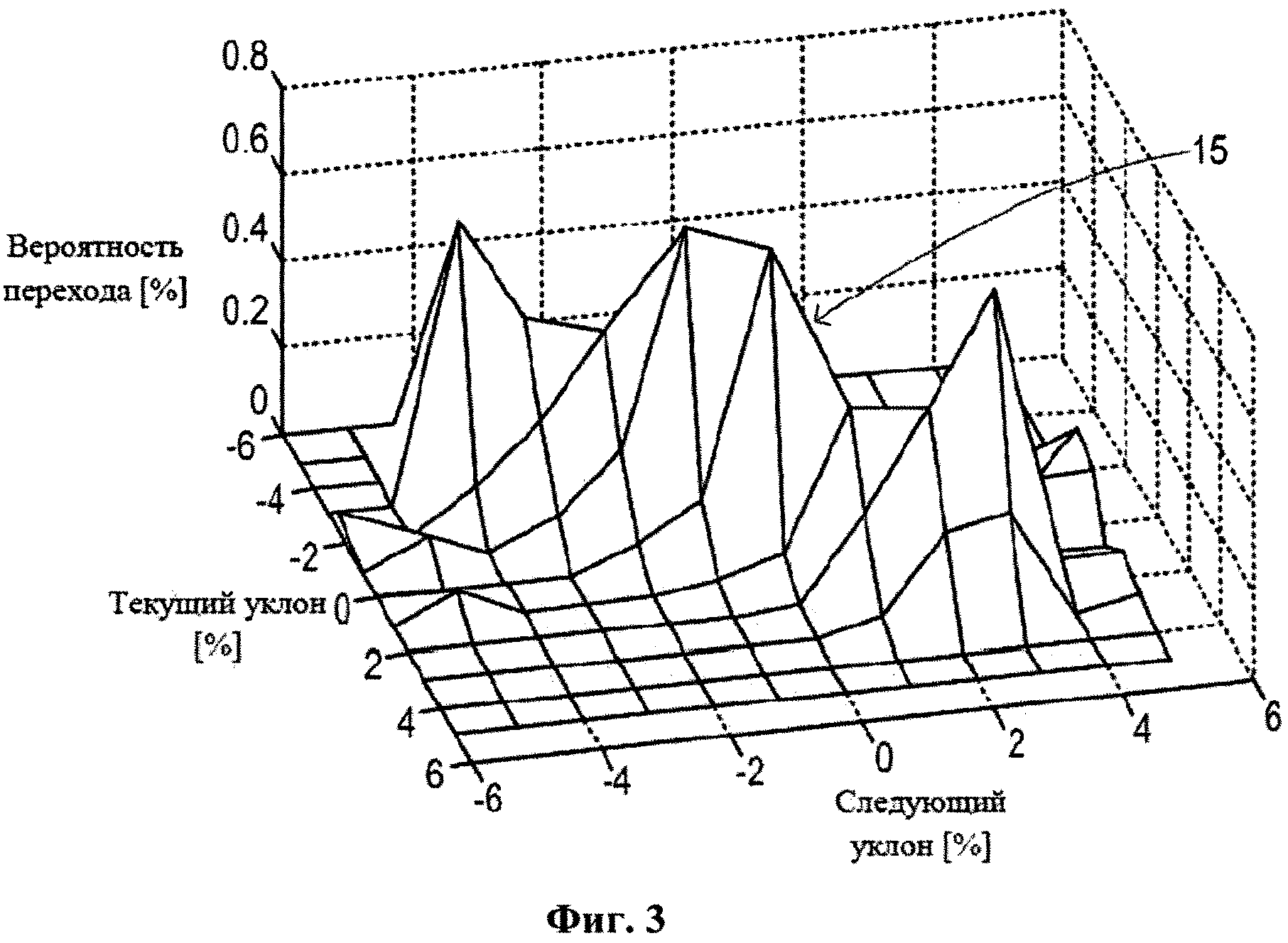
На Фиг.3 представлен трехмерный график модели переходных вероятностей для уклона дороги, соответствующего конкретному географическому региону.
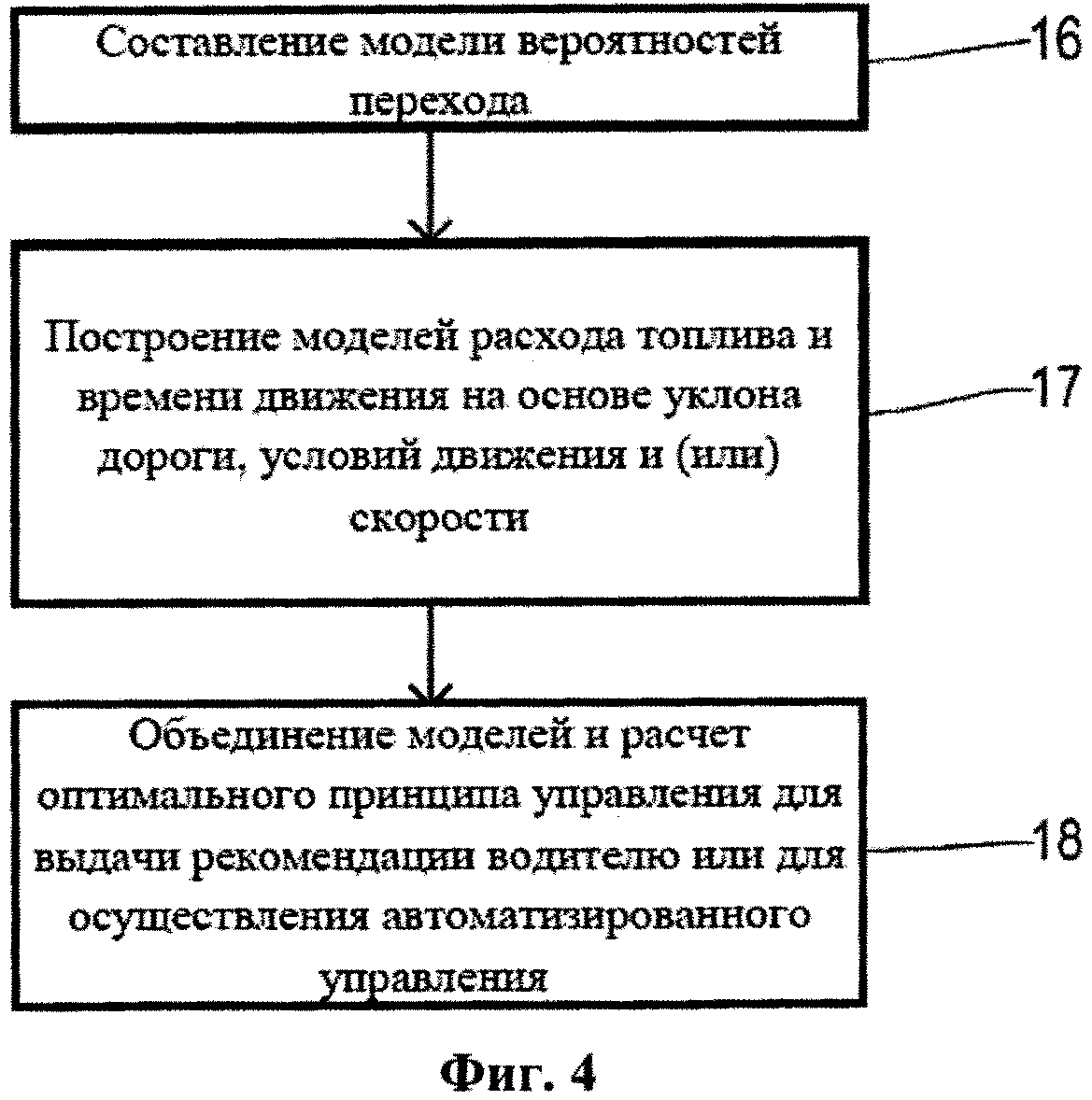
На Фиг.4 изображена логическая схема способа оптимизации управления силовым агрегатом транспортного средства с использованием моделей переходных вероятностей.
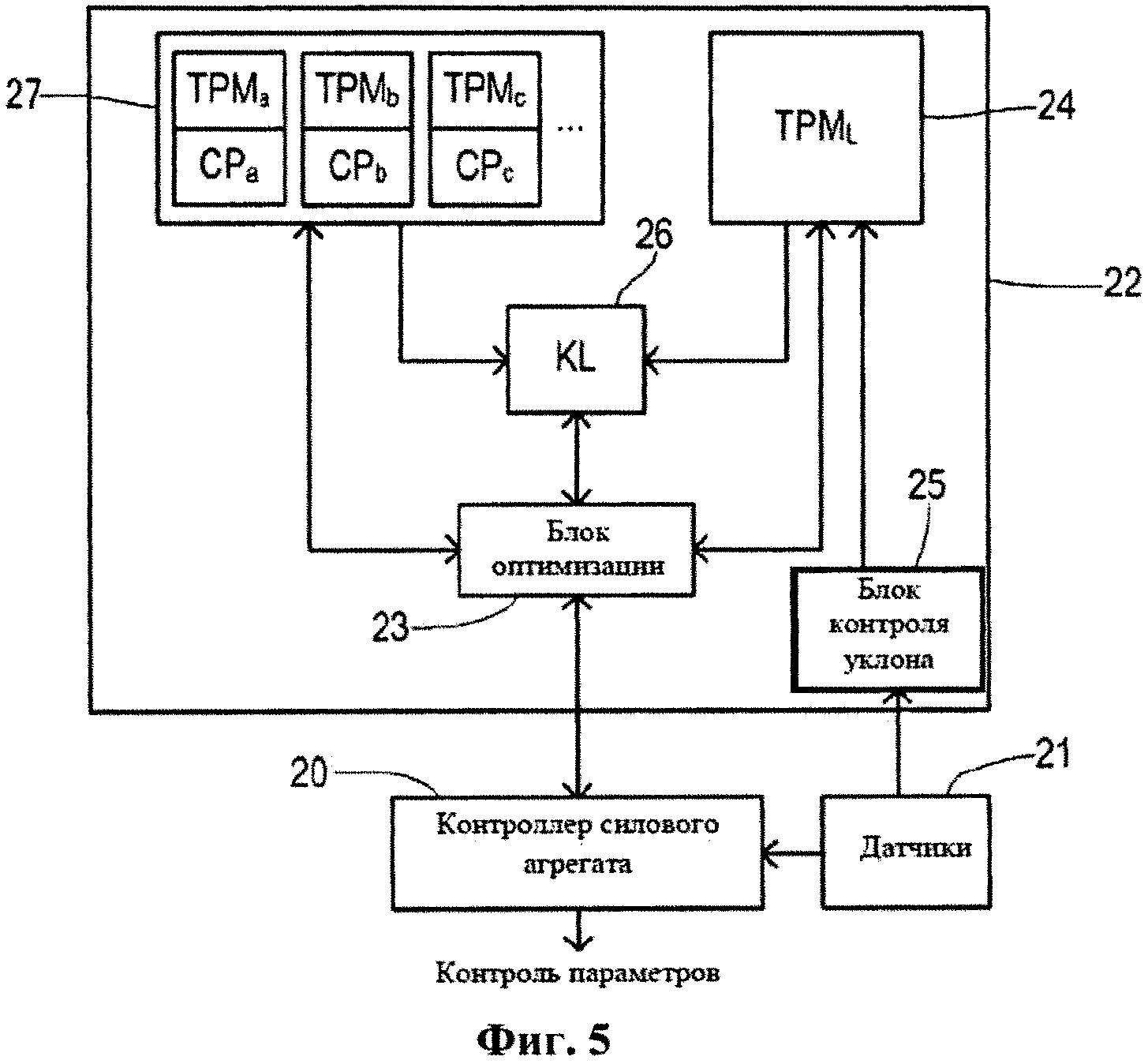
На Фиг.5 изображена блок-схема одного предпочтительного варианта используемой системы.
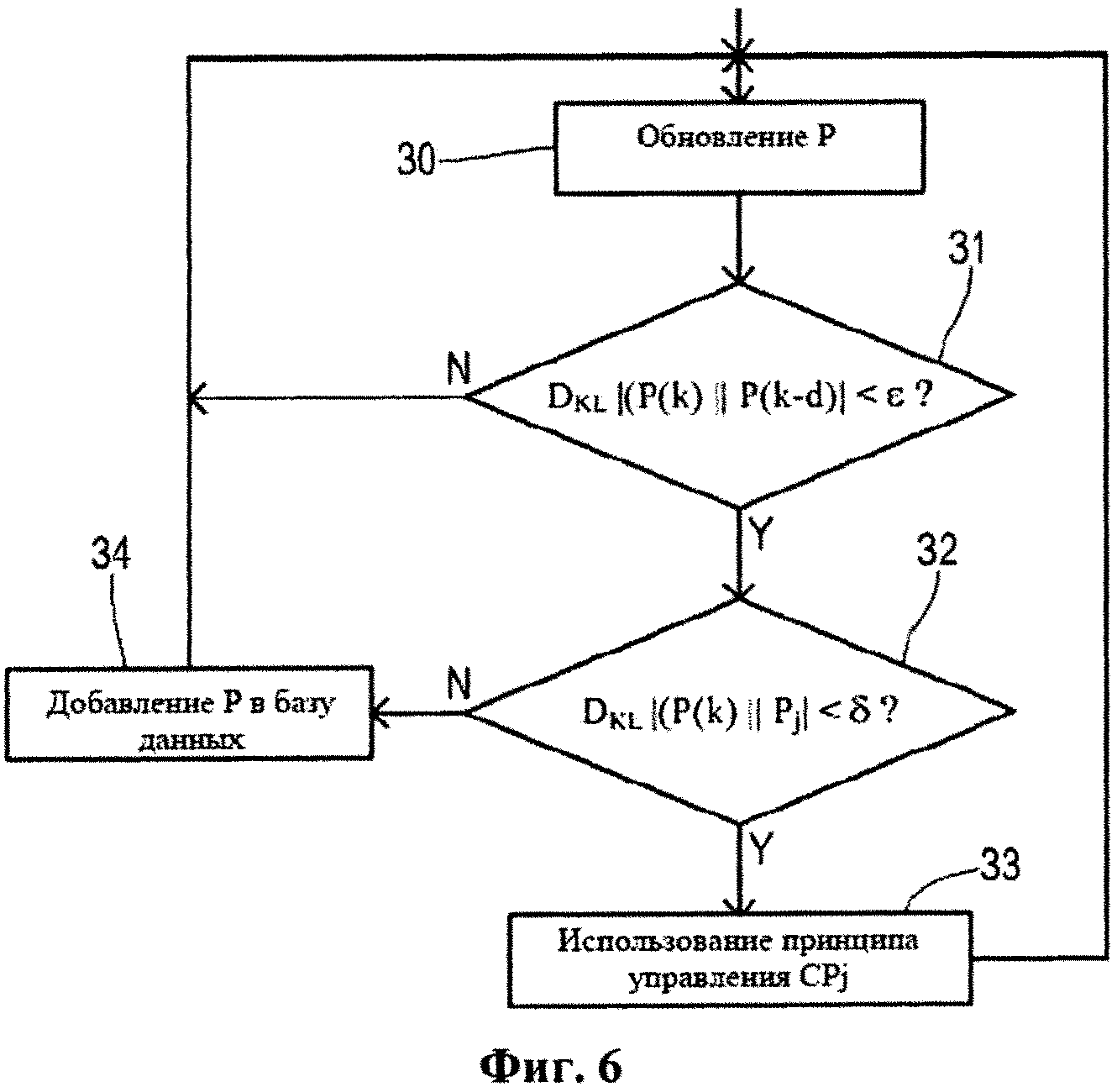
На Фиг.6 изображена логическая схема процесса согласно предпочтительному варианту способа по изобретению.
Осуществление изобретения
Для удобства изобретение подробно описано в отношении характеристики уклона дороги в одном регионе. Однако оно может быть применимо для моделирования (и использовано для оптимизации работы транспортного средства) любых других дорожных характеристик, для которых существуют переходы от одного значения к другому согласно репрезентативным вероятностям. Такие другие дорожные характеристики включают в себя профили скорости транспортного средства и скорость движения.
Бортовое исполнительное устройство, используемое для составления характеристик уклона дороги, может быть представлено сеткой вероятностного заполнения (то есть картографической сеткой) для всего предполагаемого диапазона вероятных уклонов дороги. Карта заполнения является марковской моделью с состояниями, соответствующими диапазонам конкретных значений уклона дороги или интервалам, определяемым путем наложения сетки на весь диапазон значений уклона. Поскольку уклон дороги является пространственно-распределенным, для представления изменений уклона дороги для определенного участка дороги (например, в 30 метров) использована марковская модель. Например, сетка, определяющая вероятностную марковскую модель для всего процентного диапазона уклона дороги, может быть представлена как [-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6]. Модель определяет вероятность изменения одного значения уклона на следующем участке дороги (например, следующие 30 метров). Например, если весь предполагаемый диапазон [-6%, 6%] разделен на 3 интервала по 4%, то матрица вероятностей перехода марковской модели определяет вероятность того, что на следующих 30 метрах дороги уклон будет изменяться между парами интервалов [от -6% до -2%], [от -2% до 2%] и [от 2% до 6%]. На практике разделение на три диапазона может быть слишком грубым. Увеличение числа интервалов, например, до 6, может быть предпочтительнее, а также можно использовать нечеткое разбиение.
На Фиг.1 кривая 10 представляет собой изменение значения уклона дороги по мере прохождения транспортного средства расстояния S по дороге в пределах конкретного географического региона. Диапазон (измеренный как процентный наклон поверхности) изменяется постоянно, но влияние изменения уклона дороги на эксплуатационные параметры транспортного средства (например, на экономию топлива) можно определить с помощью среднего уклона, измеренного для последовательных интервалов 11 (например, 30 м). Во время движения транспортного средства значение уклона можно определить с помощью традиционных методов, основанных на крутящем моменте двигателя, скорости вращения колеса и других регистрируемых переменных значениях, также его можно измерить, например, с помощью датчиков уклона. Среднее или составное значение уклона на соответствующих интервалах можно определить, например, вычислив интегралы на участках 12 и 13.
Пример матрицы изображен на Фиг.2, где уклон дороги разделен на шесть диапазонов значений уклона от x1 до x6. Каждый диапазон может быть обозначен согласно центру или среднему значению уклона х внутри диапазона. Каждая строка соответствует текущему значению уклона дороги (с индексом i), а каждый столбец соответствует следующему в последовательности диапазону (с индексом j). Каждый элемент матрицы имеет соответствующую вероятность π, которая определяет вероятность события перехода от первого диапазона xi к следующему диапазону xj.
На Фиг.3 изображена модель вероятностей перехода в виде трехмерной поверхности 15. На этой модели вертикальная координата представляет значение вероятности перехода для каждой пары значений текущего и следующего диапазонов. Для получения приемлемой оценки вероятностей перехода требуется очень большая выборка данных для моделируемого региона.
На основе предшествующих значений вероятности перехода можно оптимизировать эксплуатационные параметры транспортного средства, как показано на Фиг.4. Весь метод обеспечивает создание оптимального профиля скорости, который способствует уменьшению расхода топлива. Предпочтительная методика известна как оптимальное управление на основе стохастической теории, которое использует вероятностное динамическое программирование (SDP), для моделей расхода топлива, времени и расстояния перемещения, а также различных уклонов дороги и условий трафика, что влияет на эффективность, время и расстояние. На этапе 16 создается модель переходных вероятностей для описания предполагаемых значений соответствующих дорожных характеристик (например, скорости движения транспорта и уклона дороги) для конкретного региона. Построение моделей расхода топлива (например, для конкретной марки транспортного средства) и времени движения для каждого места назначения производится на этапе 17, который зависит от уклона дороги, условий трафика и/или скорости. Используя вероятностное динамическое программирование (SDP) модели объединяют на этапе 18 так, что можно рассчитать оптимальный принцип управления для регулировки параметра скорости для достижения наилучшего усредненного значения экономии топлива и/или времени движения. На основе принципа управления система управления транспортным средством может либо порекомендовать водителю выбор скорости либо выполнить автоматическую регулировку параметра скорости системы круиз-контроля.
Преимущество данного метода заключается в том, что он не использует предварительных данных о маршруте, кроме того, что транспортное средство движется в конкретном географическом регионе, для которого имеются соответствующие смоделированные дорожные характеристики. Целью является определение принципа управления, который, с одной стороны, соответствует текущим эксплуатационным условиям (как в случае традиционной стратегии управления силовым агрегатом транспортного средства), а с другой стороны, обеспечивает наилучшие усредненные эксплуатационные параметры транспортного средства при частых поездках в данном регионе. Другими словами, требуется заданное значение скорости транспортного средства для достижения оптимального соотношения между предполагаемым средним расходом топлива и предполагаемой средней скоростью движения. Согласно статьям Kolmanovsky и McDonough в данном методе рельеф и параметры движения транспорта региона описаны переходными вероятностями марковской цепи.
Для цепей с марковскими свойствами последующее состояние процесса зависит только от текущего состояния. Следующее состояние может быть предсказано с помощью вероятностного распределения текущего состояния и условных вероятностей перехода между текущим состоянием и всеми возможными последующими состояниями. Из уровня техники известно, что сбор данных осуществлялся заранее на стадии проектирования до получения достаточного количества переходов между состояниями. Это приводит к построению реалистичной модели региона (см. вышеуказанные статьи, а также статью Filev и др. «Обобщенный метод моделирования марковской цепи для использования на транспортных средствах»). Международная совместная конференция 2010 года по нейронным сетям (IJCNN, стр.1-8, июль, 2010 г.). Для этого необходима бортовая система, способная работать в режиме реального времени, автономно строить матрицы ТРМ при движении конкретного транспортного средства.
В конечном состоянии марковской модели, используемой в данном изобретении, вероятности перехода πij рассчитывают из общей частоты переходов. Для множества измерений k:

где Fij(k) - средняя частота событий перехода fij(k) из состояния  в состояние
в состояние  и F0i(k) - средняя частота событий перехода fi(k), начавшихся из состояния i. Средняя частота может быть определена по следующей формуле:
и F0i(k) - средняя частота событий перехода fi(k), начавшихся из состояния i. Средняя частота может быть определена по следующей формуле:
 , и
, и

Для конкретных событий fij(k)=1, если переход от  к
к  происходит в момент выборки k; fi(k)=1, если переход начался в состоянии
происходит в момент выборки k; fi(k)=1, если переход начался в состоянии  в момент выборки k; и в противном случае принимается нулевое значение.
в момент выборки k; и в противном случае принимается нулевое значение.
Частоты (А2) могут быть описаны рекурсивно для их вычисления в рабочем режиме:

где φ - коэффициент затухания. В одном предпочтительном варианте  . Однако более предпочтительным может быть сопоставление старых данных с экспоненциально убывающими весовыми функциями с помощью константы φ (то есть «коэффициента обучения») вместо коэффициента затухания
. Однако более предпочтительным может быть сопоставление старых данных с экспоненциально убывающими весовыми функциями с помощью константы φ (то есть «коэффициента обучения») вместо коэффициента затухания  . Для константы φ рекурсивные выражения (A3) и (А4) могут быть интерпретированы как модели AR, реализующие алгоритм экспоненциального сглаживания (фильтр низких частот), с «коэффициентом забывания» φ.
. Для константы φ рекурсивные выражения (A3) и (А4) могут быть интерпретированы как модели AR, реализующие алгоритм экспоненциального сглаживания (фильтр низких частот), с «коэффициентом забывания» φ.
Подставляя выражения (A3) и (А4) в (А1), мы получим рекурсивную форму оценки вероятностей перехода, что обычно для получения информации в рабочем режиме:

Выражение (А5) можно записать в виде матрицы, заменив fij(k) и fi(k) их векторными эквивалентами, τ(k) γ(k)T и τ(k) γ(k)Te, где τ(k) и γ(k) представляют собой М-размерные векторы i-го и j-го элементов соответственно, и нулями в других местах, при этом e представляет собой М-размерный вектор со всеми элементами, равными единице. Точнее говоря, для матрицы P вероятностей, сформированной спустя время выборки k,

где

На Фиг.5 представлена система транспортного средства, работающая в режиме реального времени, для формирования модели марковской цепи. Транспортное средство имеет контроллер 20 силового агрегата, соединенный с различными датчиками 21 для получения различных выходных параметров управления для различных компонентов силового агрегата транспортного средства (например, дросселя двигателя внутреннего сгорания). Система 22 оптимизации включает в себя контроллер 23 блока оптимизации для поддержки обученной или наблюдаемой модели 24 переходных вероятностей, обозначенной TPML. Предпочтительно, чтобы модель TPML была представлена в виде матрицы данных, взятых из векторной обработки, как было описано выше. Блок 25 контроля уклона соединен с датчиками 21 для анализа сигналов с датчиков для формирования последовательности значений уклона с заданной скоростью (например, на каждые 30 метров пройденного расстояния). Каждое значение уклона имеет соответствующий диапазон, который, как было сказано ранее, требуется для построения соответствующих моделей оптимизации.
Поскольку матрица TPML 24 составлена итерационным способом, она представляет последовательные приближения уклона дороги региона, которые становится все более точными. После достаточного количества выборок в регионе дополнительные выборки сильно не изменят значения вероятности, являющиеся элементами матрицы. В этих условиях говорят, что матрица сходится.
Сходимость полученной матрицы можно периодически проверять с помощью дивергенции Кульбака-Лейблера (KL), которая рассчитывается в блоке 26 KL. Процесс KL измеряет схожесть между двумя матрицами Р и Q вероятностей перехода марковских моделей:

Модель (А6) будет считаться адекватным представлением дорожных характеристик для региона, если временное различие между двумя дивергенциями KL для модели стремится к нулю:
DKL|P(k)||(P(k-d)|<ε
где d - количество накапливаемых выборок между периодами проверки стабильности (то есть сходимости) рассчитанных вероятностей перехода.
Когда блок 26 определяет, что дивергенция KL меньше порогового значения ε, то можно использовать сходимость матрицы для проверки того, соответствуют ли дорожные характеристики текущего региона с дорожными характеристиками, для которых был рассчитан и предоставлен библиотекой 27 оптимальный принцип управления. В библиотеке 27 хранится множество заданных эталонных матриц TPMa,…,TPMn совместно с соответствующими принципами управления CPa, … CPn. Контроллер 23 блока оптимизации по очереди сравнивает известную матрицу TPML с эталонными матрицами библиотеки для определения соответствия эксплуатационных условий и региона. В случае обнаружения такого соответствия из библиотеки 27 извлекается соответствующий принцип управления (СР) и отправляется для выполнения на контроллер 20 силового агрегата транспортного средства.
На Фиг.6 представлен предпочтительный способ согласно настоящему изобретению. Изображенная матрица TPML (обозначена P на Фиг.6) обновляется на этапе 30 с использованием последовательных значений уклона, определенных при движении транспортного средства по дороге в заданном регионе. По мере накопления данных в матрице Р на этапе 31 проверяется ее сходимость. Точнее говоря, дивергенция KL текущей версии матрицы Р и предыдущей версии матрицы Р сравниваются с пороговым значением ε. А именно, если дивергенция DKL больше ε, то процедура возвращается к этапу 30 для продолжения обновления матрицы P. Если дивергенция меньше ε, то способ переходит к этапу 32, в котором матрица Р сравнивается с эталонными матрицами в библиотеке для определения соответствия дорожных условий. Матрица Р сравнивается по очереди с каждой эталонной матрицей Pj, и если дивергенция каждого конкретного сравнения меньше порогового значения δ, то на этапе 33 применяется соответствующий принцип управления CPj, и процедура возвращается к этапу 30, продолжая обновлять матрицу Р.
Если в результате сравнения матрицы Р с эталонными матрицами Pj все значения дивергенции больше δ, то на этапе 34 матрица Р добавляется в библиотеку, и процедура возвращается к этапу 30 или продолжает обновлять матрицу Р. Если на транспортном средстве имеются соответствующие ресурсы, то добавленная эталонная матрица может быть использована в вероятностном динамическом программировании для создания соответствующего принципа управления, который может быть предоставлен контроллеру силового агрегата для использования при движении транспортного средства в текущем регионе. Если такие ресурсы на транспортном средстве недоступны, то эталонная матрица может быть загружена на другие удаленные ресурсы по беспроводной сети, либо при последующем прямом подключении транспортного средства в дилерском центре, либо сервисном центре, а принцип управления может быть передан обратно на транспортное средство для хранения в библиотеке.
После определения принципа управления и загрузки в контроллер силового агрегата способ на Фиг.6 продолжает обновлять матрицу вероятностей. В случае перемещения транспортного средства в другой регион с другими дорожными характеристиками или уклоном дороги матрица Р начнет отклоняться от предыдущего состояния сходимости. Таким образом, сходимость матрицы Р в итоге может быть больше порогового значения ε на этапе 31. Потеря сходимости означает необходимость определения другого принципа управления. При обнаружении данной дивергенции может потребоваться заново инициализировать матрицу Р в другом состоянии (например, сбросить каждый элемент матрицы на значение 1/L, где L - общее число элементов матрицы) для потенциального уменьшения времени, требуемого на сходимость в новом состоянии.
Транспортное средство и шаровой шарнир для передней подвески транспортного средства
Способ передачи другому водителю ключей транспортного средства и система для его осуществления
Способ мультимодальной навигации
Люк, содержащий сливное устройство для жидкостей
Устройство и способ распознавания дорожных знаков
Система послеаварийного определения траектории движения транспортного средства
Кронштейн для крепления периферийных устройств к транспортному средству (варианты)
Сепаратор воды/воздуха
Топливная система автомобиля и способ ее эксплуатации
Система для планирования мультимодального маршрута поездки
Транспортное средство и шаровой шарнир для передней подвески транспортного средства
Способ передачи другому водителю ключей транспортного средства и система для его осуществления
Способ мультимодальной навигации
Люк, содержащий сливное устройство для жидкостей
Устройство и способ распознавания дорожных знаков
Система послеаварийного определения траектории движения транспортного средства
Кронштейн для крепления периферийных устройств к транспортному средству (варианты)
Сепаратор воды/воздуха
Топливная система автомобиля и способ ее эксплуатации
Система для планирования мультимодального маршрута поездки

