Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ БЕЗ ИСПОЛЬЗОВАНИЯ ДАТЧИКОВ ПОЛОЖЕНИЯ
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к устройству управления электродвигателем с постоянными магнитами без использования датчиков положения, при этом оно относится к устройству управления без использования датчиков, способному оценивать индуцированное напряжение на основе информации о производной электрического тока, а также оценивать угловую скорость вращения и положение магнитного полюса на основе оцененного напряжения при работе упомянутого электродвигателя с постоянными магнитами на низкой скорости.
Предпосылки создания изобретения
[0002] Благодаря повышению эффективности магнитов стало возможным создание синхронных электрических двигателей, имеющих в своем составе постоянные магниты в качестве источника магнитного поля, без демпферной обмотки (далее в настоящем документе они называются электрическими двигателями с постоянными магнитами). При использовании таких двигателей в качестве сервоприводов для управления скоростью вращения необходима информация о положении магнитного полюса ротора. Однако во многих случаях датчик для измерения положения имеет в своем составе электрические детали, такие как полупроводниковые элементы. При этом, если датчик имеет малый размер, его механическая прочность невысока. Таким образом, в электродвигателе с постоянными магнитами возникают проблемы, связанные с надежностью и стойкостью к воздействию факторов окружающей среды. В соответствии с этим, в применениях, не требующих высокой точности и чувствительности управления положением, может возникать потребность в повышении надежности и управляемости путем применения способа управления без использования датчиков положения, в котором положение магнитного полюса вычисляется на основе информации о напряжении и токе инвертора без применения датчика положения, в связи с чем было проведено множество исследований.
[0003] Способ управления без использования датчиков положения основан на одном из двух описанных ниже принципов. Первый способ - это способ вычисления составляющей двигательной электродвижущей силы, формируемой магнитным потоком возбуждающего электромагнита. Этот способ применяют для вычисления двигательной электродвижущей силы, возникающей за счет потока магнитного поля двигателя, на основе составляющей основной гармоники напряжения или электрического тока на выходе инвертора. Двигатели с постоянными магнитами могут быть классифицированы как обладающие неявнополюсным свойством, которое заключается в том, что составляющая индукции по оси, перпендикулярной оси d (оси q), равна составляющей индукции по оси, перпендикулярной оси d (оси q), или явнополюсным свойством, которое заключается в том, что составляющая индукции по оси d не равна составляющей индукции по оси q. Настоящий способ применим к обоим этим типам, и следовательно, применим к большинству электродвигателей с постоянными магнитами. Однако в ситуациях, когда угловая скорость вращения двигателя находится в области низких скоростей, двигательная электродвижущая сила мала. Как правило, инвертор сконфигурирован для обеспечения двигателя электрической энергией, при этом управление напряжением осуществляется на основе системы с широтно-импульсной модуляцией (ШИМ). При измерении выходного напряжения инвертора возникает проблема, которая заключается в том, что точное и быстрое измерение напряжения составляющей основной гармоники ШИМ-сигнала, содержащего высокочастотные составляющие, является сложной задачей.
[0004] Существует способ, в котором вместо измерения информации о напряжении используют команду напряжения в состоянии до применения ШИМ-модуляции. Данный способ подвержен влиянию ошибки напряжения, возникающей в результате времени запаздывания или задержки срабатывания переключательного элемента. При снижении угловой скорости вращения электродвигателя с постоянными магнитами, когда двигательная электродвижущая сила становится малой, упомянутая ошибка напряжения не уменьшается. Соответственно, ошибка напряжения становится относительно более значимой, делая сложным осуществление точного управления без использования датчиков положения.
[0005] Существует еще один способ оценки положения оси явного магнитного полюса при измерении индукции с помощью наложения высокочастотной составляющей на составляющую напряжения или составляющую электрического тока на выходе инвертора. Данный способ позволяет вычислить фазу оси магнитного полюса возбуждения при помощи последовательного измерения индукции каждой осевой составляющей, если двигатель с постоянными магнитами обладает свойством, заключающимся в том, что индукция по оси d отличается от индукции по оси q. Однако данный способ неприменим для двигателей с постоянными магнитами, обладающих неявнополюсным свойством. При этом, поскольку ось магнитного полюса возбуждения (ось d) имеет две полярности, т.е. северный полюс и южный полюс, то в систему управления необходимо ввести дополнительный способ идентификации магнитного полюса для распознавания его типа на основе магнитного насыщения.
[0006] То есть первый способ, в котором вычисляют электродвижущую силу, не может быть точно выполнен в области низких угловых скоростей вращения. Второй способ, в котором накладывают высокочастотную волну, допускает выполнение в области низких угловых скоростей вращения, но ограничен конкретными типами двигателей и не может применяться для двигателя с постоянными магнитами, обладающего явнополюсным свойством или не обладающего достаточным магнитным насыщением.
Документы, описывающие существующий уровень техники
Документы, не являющиеся патентами
[0007] Документ №1, не являющийся патентом: М. Janson, L. Harnefors, О. Wallmark и М. Leksell: "Synchronization at Startup and Stable Rotation Reversal of Sensorless Nonsalient PMSM Drives" («Синхронизация при пуске и обращение при стабильном вращении неявнополюсных PMSM-приводов без использования датчиков»), IEEE Trans. IE, том 53, №2, стр.379-387 (2006 год),
Документ №2, не являющийся патентом: L. Harnefors, M. Janson, R. Ottersten, and К. Pietilatinen: "Unified Sensorless Vector Control of Synchronous and Induction Motors" («Унифицированное управление вектором синхронных и асинхронных двигателей без использования датчиков»), IEEE Trans. Ind. Electron., том 50, №1, стр.153-160, февраль 2003 года.
Сущность изобретения
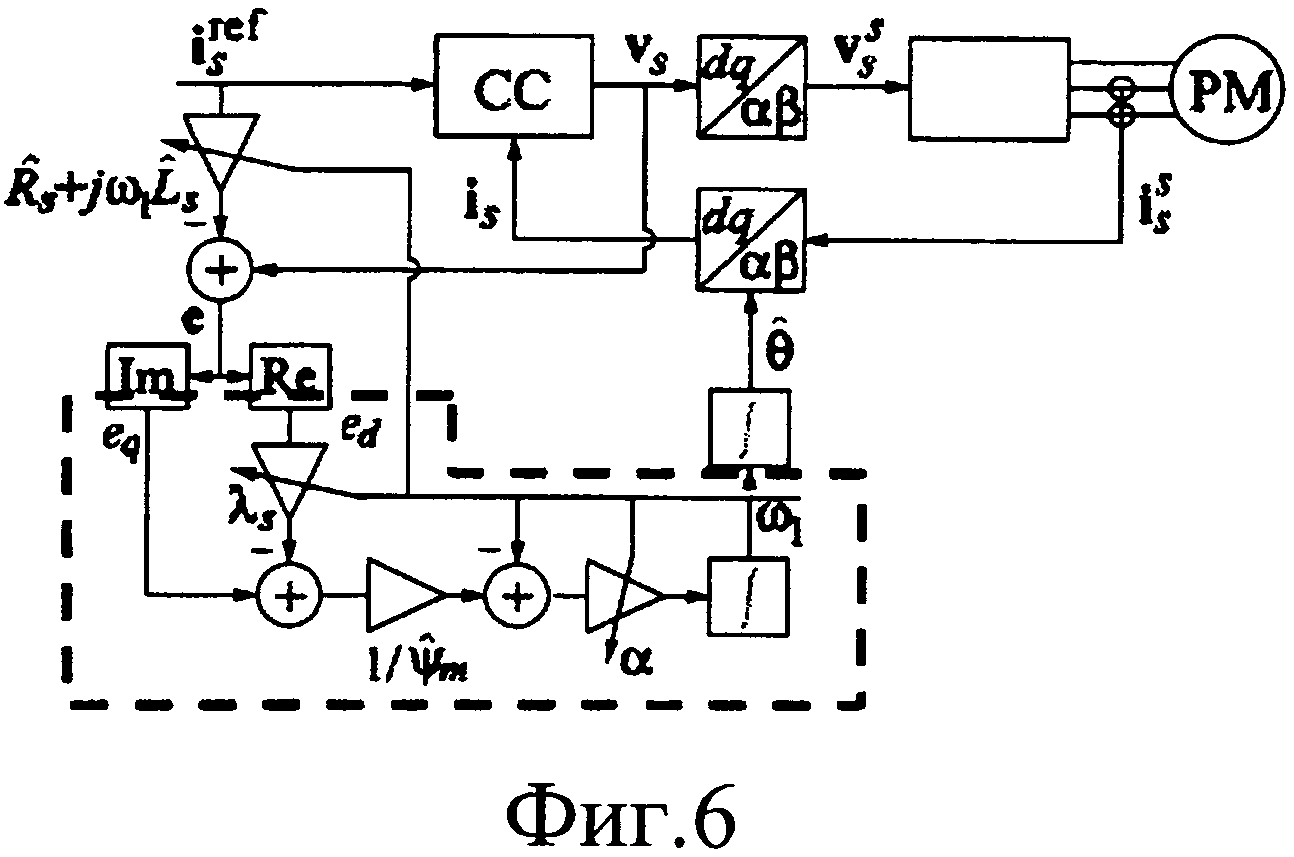
[0008] В документе №1, не являющемся патентом, описана схема управления положением на низкой угловой скорости вращения без использования датчиков, которая осуществляет управление без использования датчиков на основе блока управления в соответствии с иллюстрацией фиг. 6. Схема управления, описанная в документе №1, не являющемся патентом, представляет собой, в сущности, один из типов схемы вычисления электродвижущей силы. Принцип ее действия описан в документе №2, не являющемся патентом. Вычисление осуществляется секцией оценки скорости вращения, обведенной пунктирной линией на фиг. 6.
[0009] А именно, вычисляется индуцированное напряжение е при помощи вычитания составляющей сопротивления обмотки и составляющей падения напряжения из сигнала Vs управлением напряжением, при этом упомянутая составляющая сопротивления обмотки представляет собой произведение сигнала iref управление электрическим током и постоянной Rs+jw1Ls двигателя, а упомянутая составляющая падения напряжения представляет собой составляющую реакции якоря. При управлении положением без использования датчиков оценочную фазу магнитного полюса возбуждения используют как опорную ось управления (ось d), при этом с данной опорной осью работают как с реальной осью. Мнимую составляющую индуцированного напряжения е вычисляют как индуцированное напряжение eq по оси q, при этом реальную часть индуцированного напряжения е вычисляют как индуцированное напряжение ed по оси е. Для составляющих в опорных осях управления выполняют следующие коррекции: составляющую eq напряжения корректируют умножением на коэффициент λs усиления, соответствующий вычисленной угловой скорости ω1 и ed, данное индуцированное напряжение делят на магнитный поток Ψm, и затем используют для оценки скорости вращения. Фактически, поскольку в составляющей напряжения eq присутствует компонент обратной связи, возникающий за счет возмущения и оценки положения, а также вследствие преобразования вращательных координат, то вычисление угловой скорости ω1 выполняют после применения фильтра низких частот, ограничивающего полосу пропускания для предотвращения генерации в результате наличия этой петли обратной связи.
[0010] Одна из отличительных особенностей схемы, проиллюстрированной на фиг. 6, заключается в том, что даже если направление вращения некорректно определено как нормальное вращение или обратное вращение в области нулевой угловой скорости вращения, выполняется автоматическая коррекция оценочной угловой скорости вращения до корректного направления вращения. Однако, например, в схеме, в которой управляющее напряжение Vs подают на вход традиционной ШИМ-модуляции, если контрмер оказывается недостаточно для коррекции ошибки напряжения, возникающей в результате времени запаздывания или задержки переключения переключательного элемента, то даже если направление вращения определено ошибочно, эту ошибку невозможно обнаружить мгновенно до тех пор, пока угловая скорость обратного вращения не достигнет определенного значения, и следовательно, невозможно будет вернуться к корректному направлению вращения, пока угловая скорость обратного вращения не достигнет определенного значения.
[0011] Цель настоящего изобретения - еще более снизить нижнюю границу угловой скорости вращения, от которой можно вернуться к правильному направлению вращения, даже если присутствует ошибка напряжения между командой напряжения и фактическим напряжением, и соответственно - предложить устройство управления электродвигателем с постоянными магнитами без использования датчиков положения, которое способно осуществлять точные вычисления даже при низкой угловой скорости вращения.
[0012] В соответствии с одним из аспектов настоящего изобретения предложено устройство управления без использования датчиков положения для двигателя с постоянными магнитами, в котором: сигнал управления электрическим током формируют на основе сигнала управления скоростью и оценочной скорости; сигнал управления напряжением формируют на основе упомянутого сигнала управления электрическим током и измеренного значения электрического тока в координатной системе γ-δ, при этом упомянутое измеренное значение электрического тока измеряют посредством секции преобразования вращательных координат; и упомянутым двигателем с постоянными магнитами управляют при помощи инвертора, при этом инвертором управляют при помощи секции обратного преобразования вращательных координат и ШИМ-модуляции; отличающееся тем, что секция вычисления индуцированного напряжения вычисляет двигательную электродвижущую силу (еγ, eδ) на основе поданных на ее вход измеренного значения (iγ, iδ) электрического тока и информации (piγ, piδ) о производной электрического тока в координатной системе γ-δ в течение периода нулевого вектора напряжения; секция оценки угловой скорости вращения определяет оценочную угловую скорость (ω∧) на основе двигательной электродвижущей силы (еγ, eδ), вычисленной упомянутой секцией вычисления индуцированного напряжения; оценочную фазу (θ∧) вычисляют с помощью интегрирования упомянутой оценочной угловой скорости вращения по времени; и упомянутую оценочную фазу выводят в упомянутую секцию преобразования вращательных координат и в секцию обратного преобразования вращательных координат и используют как опорную фазу вращающейся системы координат.
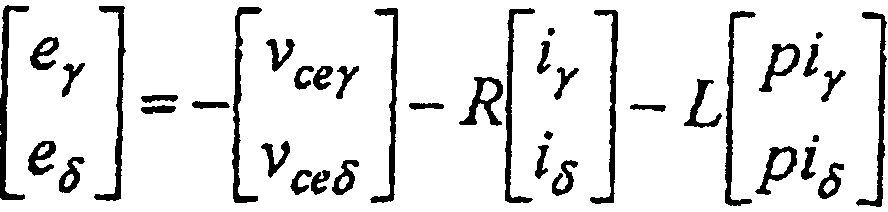
[0013] В соответствии с одним из аспектов настоящего изобретения оно отличается тем, что упомянутая секция вычисления индуцированного напряжения вычисляет двигательную электродвижущую силу (еγ, eδ) с помощью следующего уравнения:
[0014]

[0015] где R представляет собой сопротивление обмотки, L представляет собой индуктивность обмотки, φd представляет собой магнитный поток связи, а р представляет собой оператор дифференцирования (d/dt). В соответствии с одним из аспектов настоящего изобретения, оно отличается тем, что упомянутая секция оценки скорости вращения вычисляет упомянутую оценочную угловую скорость (ω∧) с помощью следующего уравнения:
[0016]
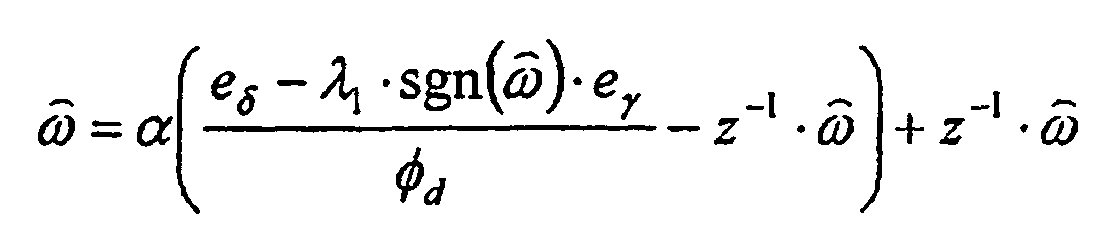
[0017] где α=α0+λ2|ω∧|, α0 - постоянная, λ1, λ2 представляют собой положительные коэффициенты усиления, а z-1 представляет собой последнее считанное значение. В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что на стороне ввода измеренного электрического тока в упомянутую секцию преобразования вращательных координат имеется секция определения производной электрического тока, и упомянутая секция преобразования вращательных координат принимает входные данные измерения трехфазного электрического тока в течение периода нулевого вектора напряжения упомянутой ШИМ-модуляции и производную этого электрического тока; и упомянутая секция вычисления индуцированного напряжения вычисляет двигательную электродвижущую силу (еγ, еδ) на основе поданного на ее вход измеренного значения (iγ, iδ) электрического тока и информации (piγ′, piδ′) о производной электрического тока, полученной посредством преобразования вращательных координат упомянутой секцией преобразования вращательных координат.
[0018] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что упомянутая секция вычисления индуцированного напряжения вычисляет упомянутую двигательную электродвижущую силу (еγ, eδ) с использованием следующего уравнения:
[0019]

[0020] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что упомянутую информацию (piγ′, piδ′) о производной электрического тока получают при помощи вычисления производной после преобразования упомянутой секцией преобразования вращательных координат в составляющие (iα, iβ) электрического тока по двум ортогональным осям (α, β) неподвижной системы координат.
[0021] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что имеется секция коррекции падения напряжения на стороне входа упомянутой секции преобразования вращательных координат для коррекции падения напряжения на переключательном элементе, при этом упомянутая секция преобразования вращательных координат принимает входные данные измерения трехфазного электрического тока, выполняемого во время периода нулевого вектора напряжения упомянутой ШИМ-модуляции, и входные данные коррекции падения напряжения из секции коррекции падения напряжения; и упомянутая секция вычисления индуцированного напряжения вычисляет упомянутую двигательную электродвижущую силу на основе вводимого значения измеренного электрического тока, упомянутой информации о производной электрического тока и упомянутой коррекции падения напряжения.
[0022] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что упомянутая информация о производной электрического тока основана на вращающейся системе координат или на неподвижной системе координат.
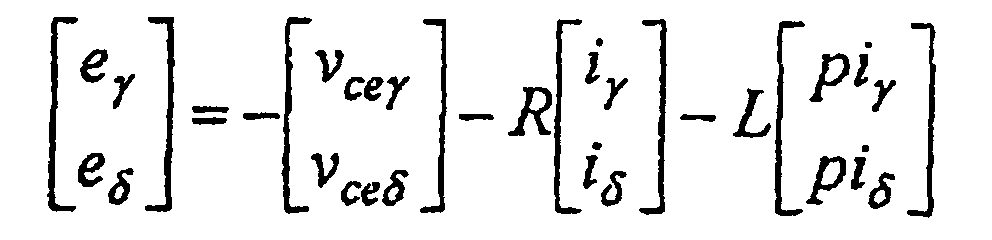
[0023] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что упомянутая секция вычисления индуцированного напряжения вычисляет двигательную электродвижущую силу (еγ, еδ) с использованием следующего уравнения:
[0024]
[0025] где νceγ, νceδ представляют собой коррекции напряжения. В соответствии с еще одним аспектом настоящего изобретения, оно отличается тем, что упомянутая секция вычисления индуцированного напряжения вычисляет упомянутую двигательную электродвижущую силу (еγ, еδ) с помощью следующего уравнения:
[0026]

[0027] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что упомянутую информацию о производной электрического тока вводят в упомянутую секцию преобразования вращательных координат в виде вычисленного значения разности между значениями электрического тока, измеренными в двух точках, между которыми находится пик несущей, во время периода нулевого вектора напряжения.
[0028] В соответствии с еще одним аспектом настоящего изобретения, оно отличается тем, что информацию о производной электрического тока вводят в упомянутую секцию преобразования вращательных координат в виде значения, полученного путем дифференцирования скользящего среднего значения для значений электрического тока, измеренных между пиком и нижней частью несущей во время периода нулевого вектора напряжения.
[0029] В соответствии с еще одним аспектом настоящего изобретения оно отличается тем, что упомянутую коррекцию падения напряжения определяют с использованием элементов табличных данных, соответствующих измеренным значениям трехфазного электрического тока, при этом и для положительной, и для отрицательной полярности каждой из упомянутых трех фаз имеется индивидуальный элемент из упомянутых элементов табличных данных.
Результат изобретения
[0030] Как было описано выше, в соответствии с настоящим изобретением оценочную фазу θ∧ вычисляют на основе сигналов iγ, iδ электрического тока в координатной системе γ-δ во время периода нулевого вектора напряжения и на основе информации piγ, piδ о производной электрического тока. Это позволяет вычислить индуцированное напряжение с устранением влияния времени запаздывания, и следовательно, получить нормальное управление без использования датчиков положения в диапазоне более низких скоростей вращения.
Краткое описание чертежей
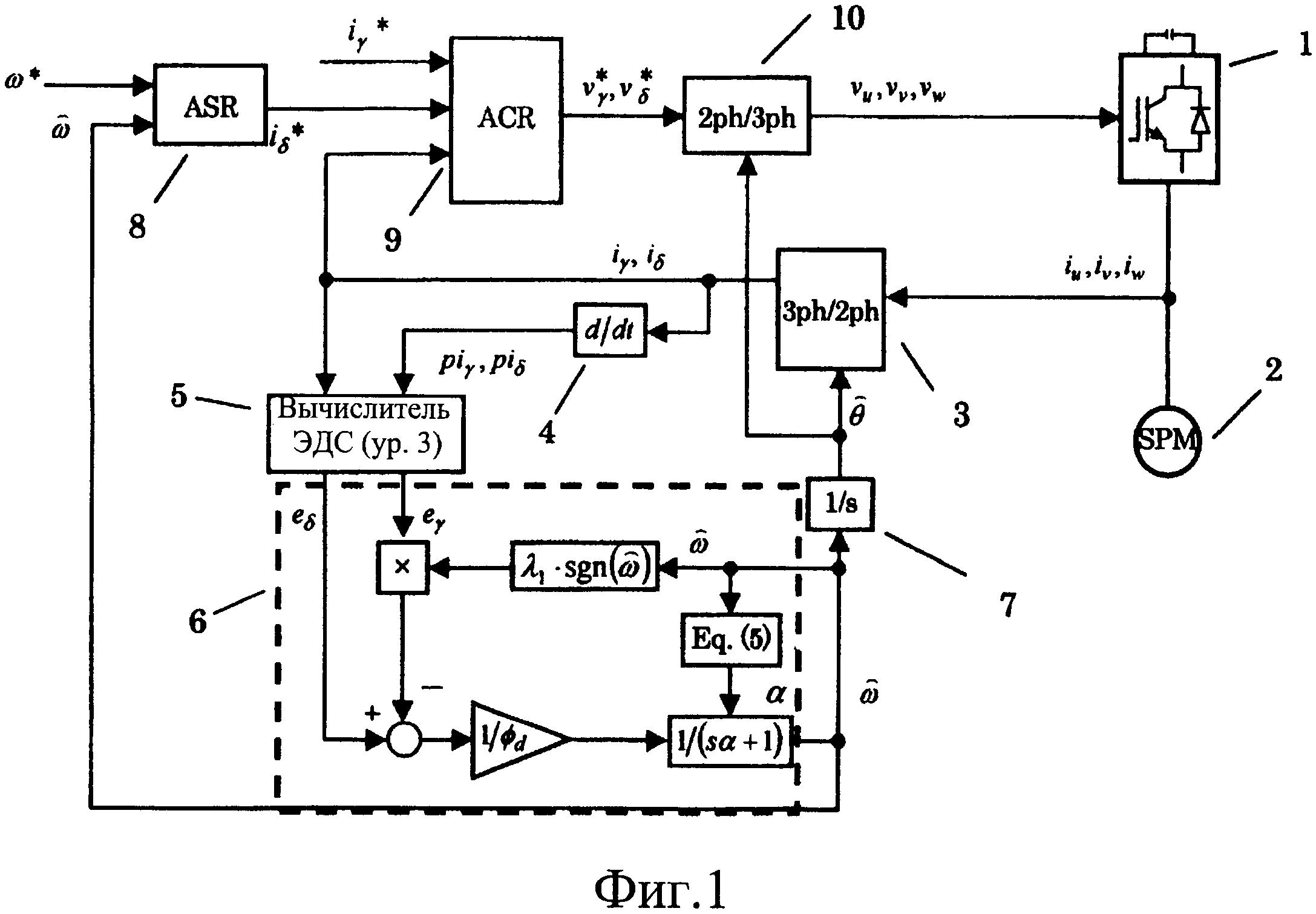
[0031] Фиг. 1 представляет собой блок-схему конфигурации устройства управления в соответствии с одним из вариантов осуществления настоящего изобретения.
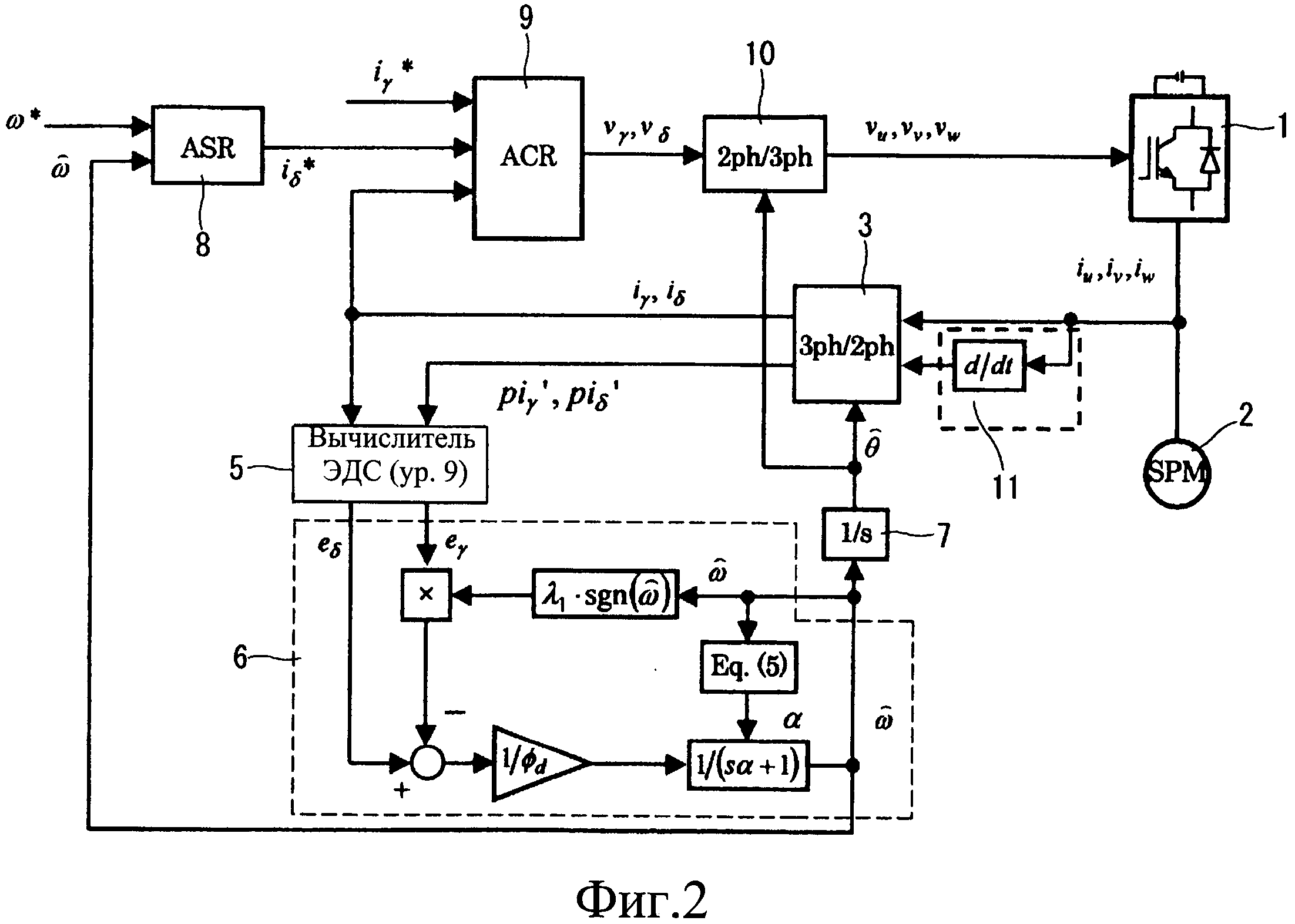
Фиг. 2 представляет собой блок-схему конфигурации устройства управления в соответствии с другим вариантом осуществления настоящего изобретения.
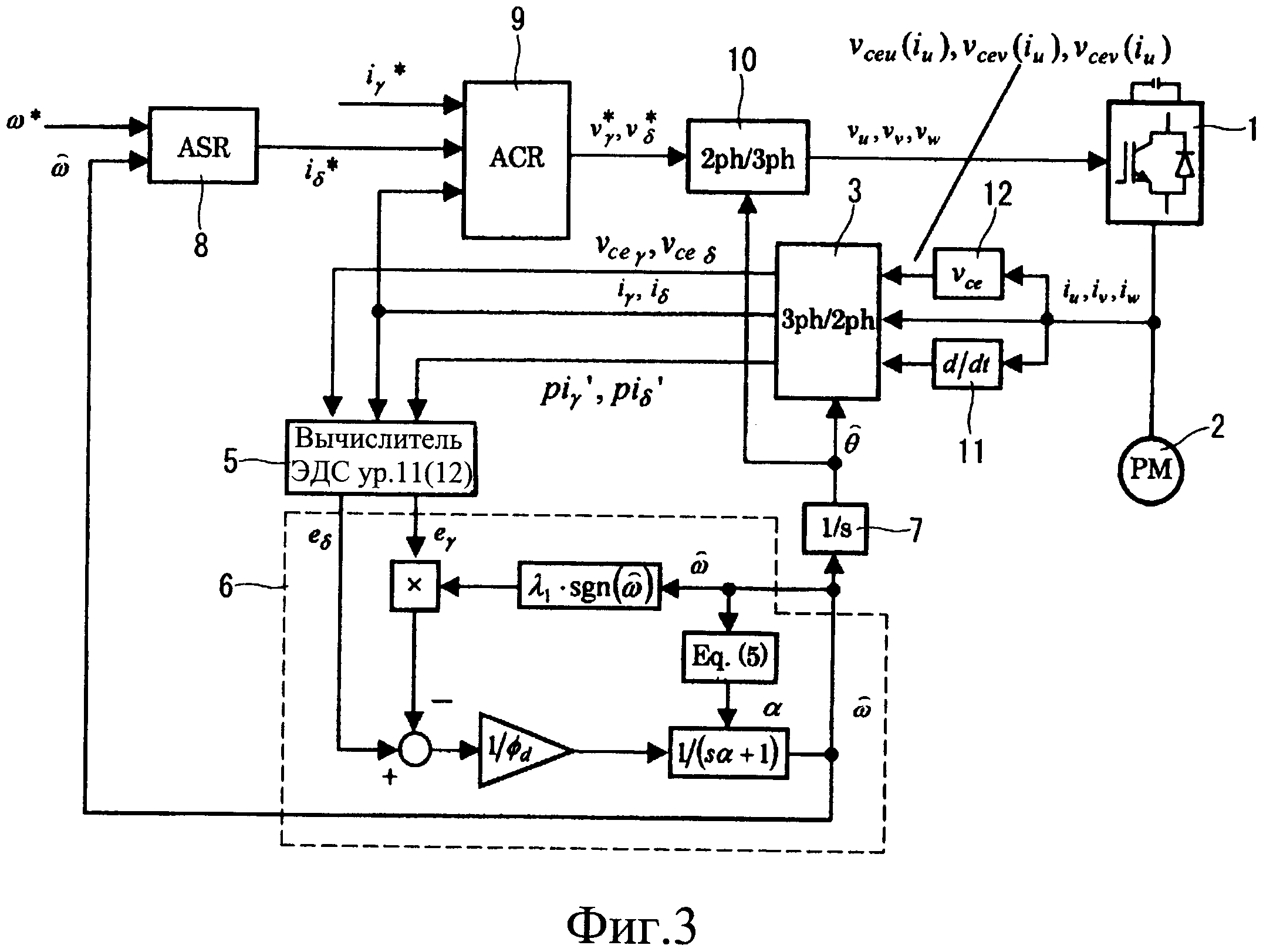
Фиг. 3 представляет собой блок-схему конфигурации устройства управления в соответствии с еще одним вариантом осуществления настоящего изобретения.
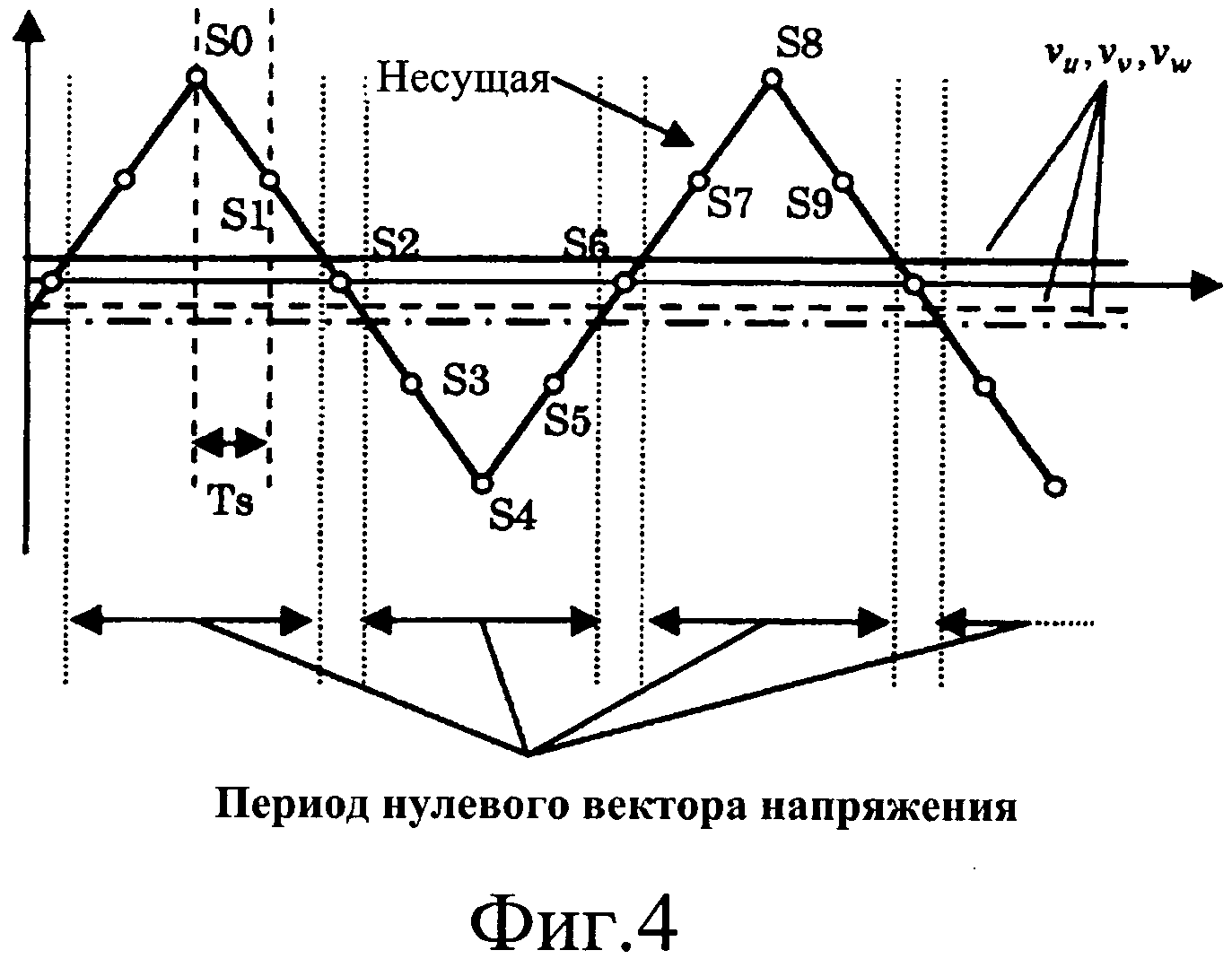
Фиг. 4 представляет собой блок-схему с иллюстрацией измерения электрического тока в соответствии с настоящим изобретением.
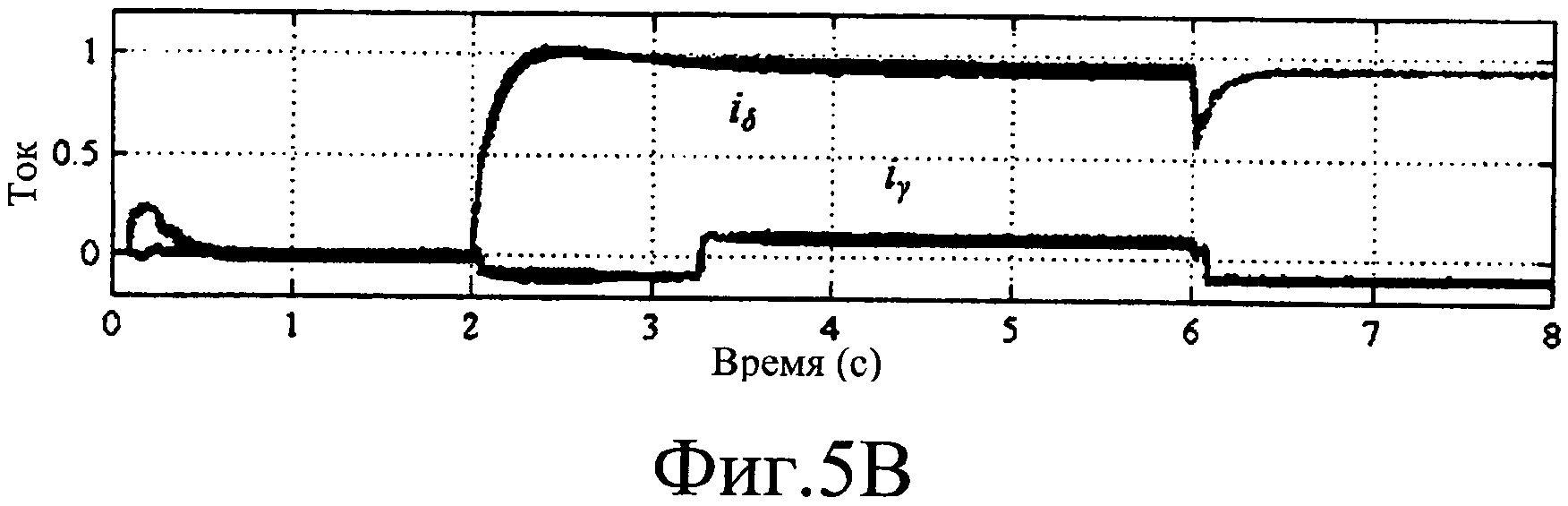
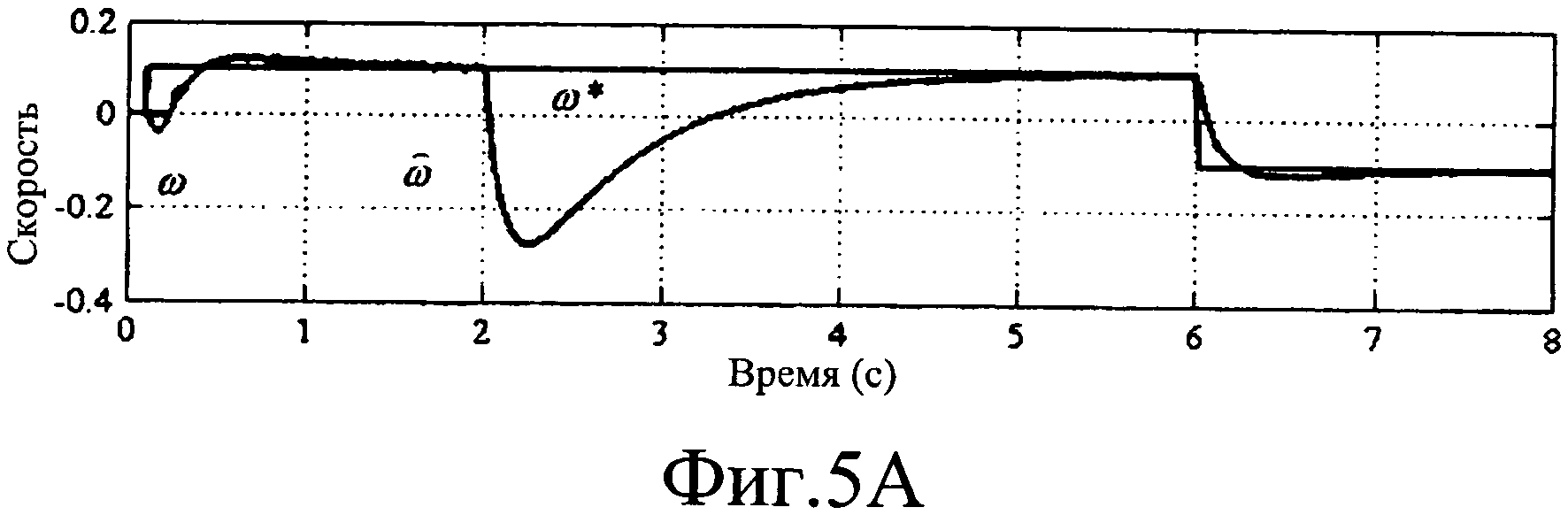
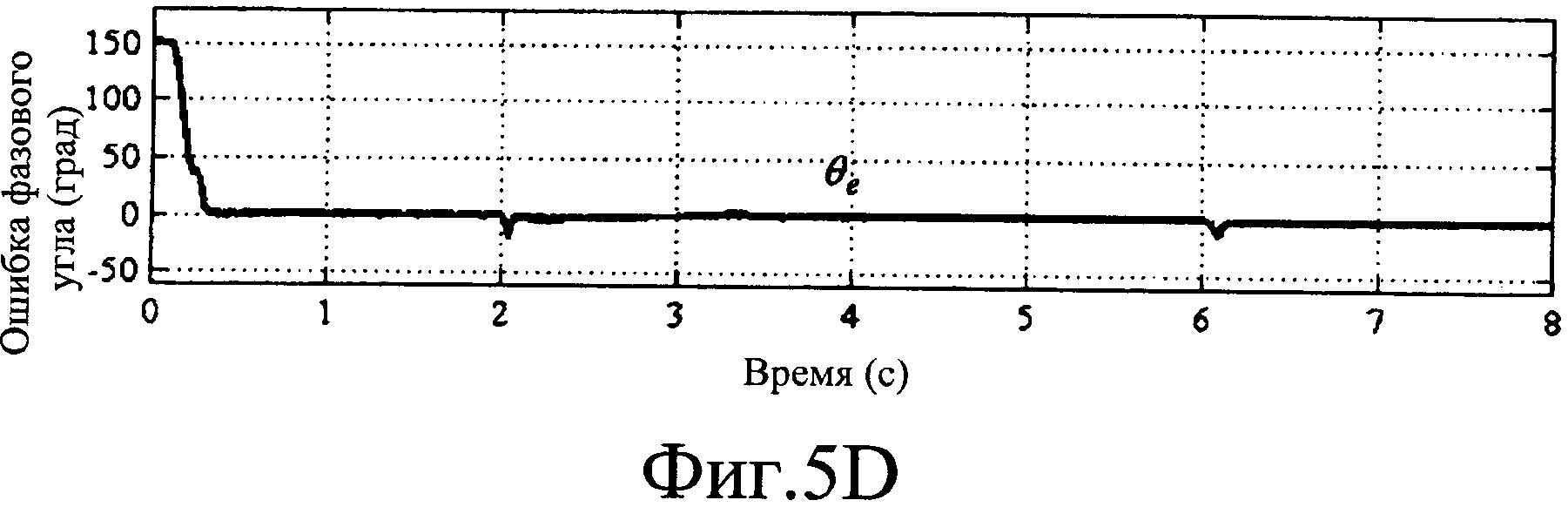
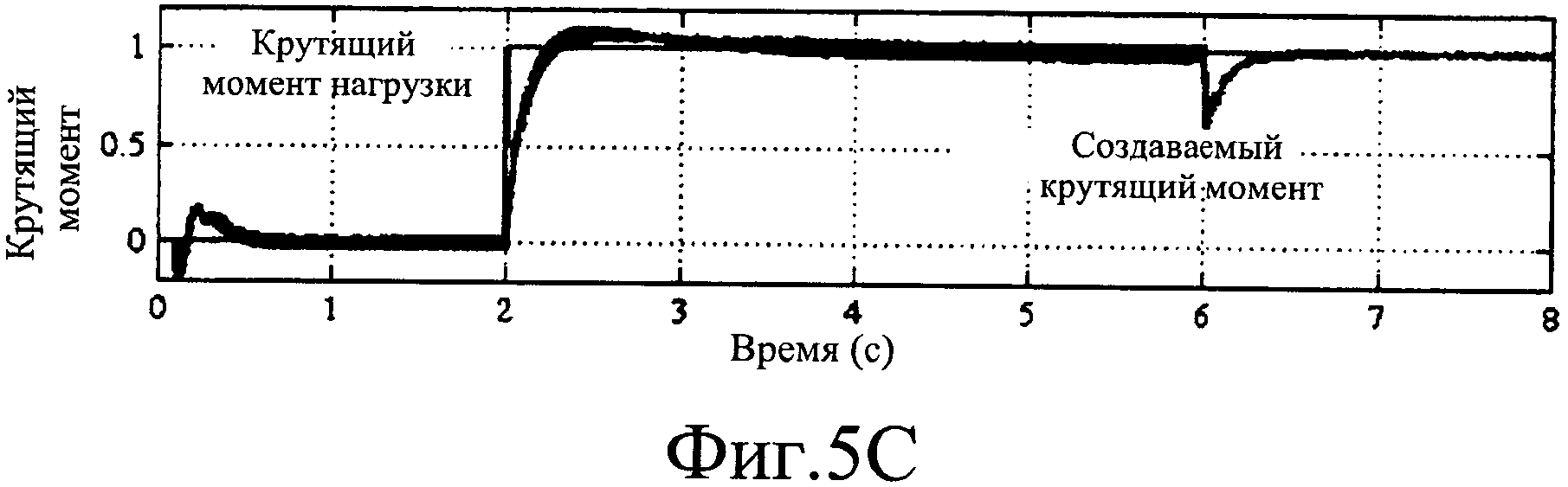
Фиг. 5 представляет собой временную диаграмму, иллюстрирующую результат моделирования в соответствии с настоящим изобретением.
Фиг. 6 представляет собой блок-схему конфигурации известного устройства управления без использования датчиков для двигателя с постоянными магнитами.
Предпочтительные варианты осуществления настоящего изобретения
[0032] Настоящее изобретение предназначено для вычисления двигательной электродвижущей силы на основе данных измеренного сигнала электрического тока и информации о производной электрического тока, вводимых в секцию вычисления индуцированного напряжения, для вычисления оценочной фазы магнитного полюса на основе упомянутой двигательной электродвижущей силы. Ниже настоящее изобретение описано более подробно на примере вариантов его осуществления.
Вариант №1 осуществления изобретения
[0033] На фиг. 1 показана блок-схема устройства управления без использования датчиков положения в соответствии с первым вариантом осуществления настоящего изобретения. Позицией 1 обозначен инвертор с ШИМ-управлением. Позицией 2 обозначен двигатель с постоянными магнитами. В настоящем описании магнитную ось возбуждения северного полюса реального двигателя с постоянными магнитами называют осью d, a фазу, сдвинутую на 90 градусов в направлении нормального вращения относительно оси d, называют осью q. Однако ось d и ось q не могут быть измерены непосредственно, поскольку датчик положения не применяется. Соответственно, северный полюс, полученный при помощи оценки положения магнитного полюса, называют осью γ, а фазу, сдвинутую на 90 градусов в направлении вращения относительно этой оси γ, называют осью δ.
[0034] Позицией 3 обозначена секция преобразования вращательных координат, которая выполняет преобразования координат вводимого трехфазного электрического тока iu, iv, iw, измеренного датчиком тока, в значения iγ, iδ в оценочных осях. Сигналы iγ, iδ электрического тока, полученные с помощью преобразования координат, вводят в секцию 4 определения производной электрического тока, в секцию 5 вычисления индуцированного напряжения и в секцию 9 управления электрическим током. Секция 4 определения производной электрического тока определяет скорость изменения электрических токов в осях γ-δ в течение периода нулевого вектора напряжения, piγ, piδ, и затем вводит эти значения в секцию 5 вычисления индуцированного напряжения. Секция 5 вычисления индуцированного напряжения вычисляет двигательные электродвижущие силы еγ, eδ на основе вводимых сигналов iγ, iδ электрического тока и информации piγ, piδ о производной электрического тока в соответствии с последующим описанием. Позицией 6 обозначена секция оценки скорости вращения, а позицией 7 обозначен интегратор. Интегратор 7 интегрирует оценочную скорость, получаемую секцией 6 оценки скорости вращения, с целью вычисления оценочного положения θ∧ магнитного полюса и затем выводит его в секцию 3 преобразования вращательных координат и в секцию 10 обратного преобразования вращательных координат. Позицией 8 обозначена секция управления угловой скоростью вращения, а позицией 9 обозначена секция управления электрическим током.
[0035] Ниже описана работа устройства. Секция 8 управления скоростью выводит сигнал iδ* управления электрическим током составляющей по оси δ, соответствующий сигналу управления крутящим моментом, на основе вводимой в нее информации о сигнале ω* управления угловой скоростью вращения и оцененной угловой скорости ω∧ вращения. Этот сигнал iδ* управления электрическим током и произвольный сигнал iγ* управления электрическим током по оси γ вводят в секцию 9 управления электрическим током. Секция 9 управления электрическим током принимает входные данные сигналов iγ, iδ электрического тока, полученных при помощи преобразования во вращающуюся координатную систему с помощью секции 3 преобразования вращательных координат. Секция 9 управления электрическим током выполняет вычисление обратной связи с помощью сравнения сигналов iγ*, iδ* управления электрическим током и сигналов iγ, iδ электрического тока и выдает сигналы νγ*, νδ* управления напряжением во вращающейся координатной системе (координатной системе γ-δ), основанной на расчетной оси магнитного полюса. Сигналы νγ*, νδ* управления напряжением подают с обратным преобразованием вращательных координат и с преобразованием из двухфазного в трехфазное напряжение в секции 10 обратного преобразования вращательных координат, которая функционирует обратным образом по сравнению с секцией 3 преобразования вращательных координат, и затем вводят в качестве трехфазного управляющего сигнала νu, νγ, νw переменного тока в инвертор 1. Инвертор 1 усиливает мощность трехфазного сигнала νu, νγ, νw управления переменного тока с помощью ШИМ-модуляции и затем выдает практически эквивалентное напряжение. Выше описан блок управления, который является общим для случая, в котором имеется датчик положения, и для случая, в котором датчика положения нет.
[0036] Ниже описана подсистема управления без использования датчиков положения. Секция 4 определения производной электрического тока измеряет скорость изменения токов piγ, piδ в осях γ-δ во время периода нулевого вектора напряжения. Токи в осях γ-δ получают при помощи преобразования вращательных координат из трехфазных электрических токов iu, iv, iw. Упомянутое преобразование вращательных координат реализуют с помощью метода на основе непрерывного сигнала, с использованием аналогового умножителя или аналогового сумматора-вычитателя, или с помощью метода на основе дискретного сигнала для преобразования трехфазных электрических токов iu, iv, iw с помощью аналого-цифрового преобразователя (АЦП) в цифровые сигналы, и затем выполнения вычисления в секции преобразования сигналов с помощью цифрового преобразователя, например, центрального процессорного блока (CPU).
[0037] В данном варианте осуществления изобретения достаточно обнаружения информации piγ, piδ о производной электрического тока в виде скорости изменения, поэтому преобразование вращательных координат может быть реализовано любым из двух упомянутых способов. Например, в случае аналогового преобразования, для получения скорости изменения piγ, piδ, сигнал, полученный после преобразования вращательных координат, обрабатывают с помощью аналогового дифференциатора и затем осуществляют измерение дифференциальной составляющей тока во время периода нулевого вектора напряжения и запоминают это значение. С другой стороны, в случае применения АЦП, электрический ток измеряют и преобразуют в секции преобразования сигнала в множество моментов времени в течение периода нулевого вектора напряжения, а дифференциальную составляющую получают при помощи аппроксимации производной на основе дискретных значений электрического тока в множество моментов времени. Сигналы iγ, iδ электрического тока и информацию о производной электрического тока (скорости изменения) piγ, piδ, полученную с помощью любого из упомянутых способов, применяют для осуществления управления без использования датчиков положения.
[0038] В настоящем документе определено уравнение, выражающее базовую характеристику двигателя с постоянными магнитами. В ортогональной координатной системе (координатной системе d-q), которая представлена электрическим углом относительно оси северного полюса реального устройства, обозначенной как ось d, уравнение напряжения двигателя с постоянными магнитами выглядит следующим образом (1):
[0039]

[0040] где νd, νq представляют собой напряжения по осям d, q; id, iq представляют собой электрические токи по осям d, q; R представляет собой сопротивление обмотки, L представляет собой индуктивность обмотки, φd представляет собой магнитный поток связи с обмоткой статора, который порождается магнитным потоком упомянутого магнита; ω представляет собой угловую скорость ротора (выраженную электрическим углом ω=dθ/dt), θ представляет собой положение магнитного полюса ротора (в виде электрического угла), а p представляет собой оператор дифференцирования (d/dt). В настоящем изобретении, поскольку объектом управления является двигатель с постоянными магнитами, обладающий неявнополюсным свойством, предполагается, что составляющая индукции по оси d и составляющая индукции по оси q являются равными друг другу, и соответственно, они выражаются с использованием общего коэффициента.
[0041] Далее, в уравнении (2) учитывается ошибка фазы (ошибка оси) по отношению к фактической фазе θ, θе=θ-θ∧, по отношению к оценочной фазе θ∧ в координатной системе γ-δ. Используются те же переменные, что и в уравнении (1), с тем предположением, что доступны истинные значения импеданса двигателя и магнитного потока связи постоянного магнита. При этом оценочная угловая скорость ω∧ и оценочная фаза θ∧ связаны как ω∧=θ∧/dt.
[0042]

[0043] В уравнении (2) допущено, что скорость изменения ошибки θе оси во времени в уравнении (2) является малой, поэтому слагаемое дифференциала ошибки оси можно опустить. При этом в уравнении (2) информацию piγ, piδ о производной электрического тока в координатной системе γ-δ во время периода нулевого вектора напряжения получают при помощи последовательного применения преобразования вращательных координат к измеренным значениям iγ, iδ электрического тока с использованием оценочной фазы θ∧ и дифференцирования.
[0044] Выходные напряжения инвертора в течение периода нулевого вектора напряжения равны νγ=0, νδ=0. Соответственно, левая часть уравнения (2) становится нулевой, и уравнение превращается в уравнение (3) для вычисления двигательных электродвижущих сил еγ, еδ, порождаемых магнитным потоком φd связи постоянного магнита.
[0045]

[0046] Положение магнитного полюса вычисляют на основе уравнения (3), выражающего двигательные электродвижущие силы еγ, еδ в течение периода нулевого вектора напряжения. Уравнение (4) получают, применив линию задержки первого порядка дискретной системы к уравнению для оценки скорости. Полоса пропускания линии задержки первого порядка изменяется как ω∧=θ∧/dt в соответствии с уравнением (5).
[0047]

[0048]

[0049] где α0 представляет собой постоянное значение; λ1, λ2 представляют собой положительные коэффициенты усиления, a z-1 представляет собой последнее значение измерения. Секция 6 оценки скорости вращения, проиллюстрированная на фиг. 1, вычисляет оценочную угловую скорость ω∧ вращения на основе уравнений (4), (5) и выводит оценочную фазу θ∧ через интегратор 7. А именно, секция 5 вычисления индуцированного напряжения выводит двигательные электродвижущие силы еγ, еδ в течение периода нулевого вектора напряжения на основе сигналов iγ, iδ электрического тока в координатной системе γ-δ и информации piγ, piδ о производной электрического тока в течение периода нулевого вектора напряжения с использованием уравнения (3). Секция 6 оценки скорости вращения выполняет вычисления согласно уравнениям (4), (5) с использованием поданных на ее вход двигательных электродвижущих сил еγ, еδ и затем выдает оценочную угловую скорость ω∧. Интегратор 7 вычисляет оценочную фазу θ∧ при помощи интегрирования по времени оценочной угловой скорости ω∧ и затем выводит ее в секцию 3 преобразования вращательных координат и в секцию 10 обратного преобразования вращательных координат для использования в качестве опорной фазы вращательной системы координат.
[0050] В соответствии с данным вариантом осуществления настоящего изобретения в случае, когда двигатель с постоянными магнитами, обладающий неявнополюсным свойством, управляется с помощью инвертора с выполнением ШИМ-модуляции, оценочную фазу θ∧ вычисляют на основе сигналов iγ, iδ электрического тока в координатной системе γ-δ и информации piγ, piδ о производной электрического тока в течение периода нулевого вектора напряжения. Это позволяет осуществлять вычисление индуцированного напряжения без влияния времени запаздывания, и следовательно, реализовывать управление без использования датчиков положения, нормально работающее в области до более низкой границы скоростей.
Вариант №2 осуществления изобретения
[0051] Фиг. 2 иллюстрирует второй вариант осуществления настоящего изобретения, который отличается от первого варианта осуществления настоящего изобретения, проиллюстрированного на фиг. 1, тем, что секция 11 определения производной электрического тока работает в неподвижной системе координат для получения информации pi′γ, pi′δ. В первом варианте осуществления настоящего изобретения для правильного получения информации о производной электрического тока оценочная фаза θ∧, которую используют для преобразования вращательных координат, должна быть непрерывной или подобной непрерывной. В соответствии с этим, в случае, когда сигналы трехфазного электрического тока преобразуются аналого-цифровым преобразователем в цифровые значения, оценочная фаза θ∧, используемая для преобразования вращательных координат, также должна последовательно обновляться, что увеличивает вычислительную нагрузку. Это учтено во втором варианте осуществления настоящего изобретения, где информацию pi′γ, pi′δ о производной электрического тока получают в неподвижной координатной системе, поэтому оценочную фазу θ∧ не нужно последовательно обновлять, что позволяет обеспечить более простое выполнение вычислений.
[0052] В частности, достаточно, чтобы сигналы iγ, iδ электрического тока и информация pi′γ, pi′δ о производной электрического тока измерялись в течение периода нулевого вектора напряжения только в тот момент времени во время периода нулевого вектора напряжения, в котором вычисляются двигательные электродвижущие силы еγ, eδ. Также достаточно, чтобы преобразование координат выполнялось только во время периода нулевого вектора напряжения. Это позволяет сократить время вычисления в CPU и в цифровой схеме, которая выполняет вычисление, и следовательно, такой способ обладает преимуществом, заключающимся в возможности применения даже в схемах с невысоким быстродействием.
[0053] Несмотря на то что на фиг. 2 проиллюстрирован пример, в котором измеренные трехфазные электрические токи iu, iv, iw дифференцируют непосредственно, вычисление производной может быть реализовано как с помощью аналогового сигнала, так и с помощью цифрового сигнала. А именно, достаточно, чтобы информация была эквивалентной информации pi′γ, pi′δ о производной электрического тока, необходимой для результирующего вычисления двигательных электродвижущих сил еγ, еδ в течение периода нулевого вектора напряжения. Например, это может быть реализовано с помощью другой последовательности операций, при которой сначала выполняют преобразование из трех фаз в две фазы для получения сигналов тока в ортогональных осях неподвижной системы координат (системы координат α-β), iα, iβ, и затем выполняют вычисление дифференциала, и после этого выполняют преобразование вращательных координат.
[0054] Далее описано вычисление угловой скорости в случае, когда применяют информацию pi′γ, pi′δ о производной электрического тока в соответствии с фиг. 2. Уравнение (6) представляет собой уравнение напряжения двигателя с постоянными магнитами в системе координат, неподвижной относительно обмотки статора.
[0055]

[0056] где να, νβ представляют собой напряжения по осям α, β; iα, iβ представляют собой электрические токи по осям α, β; R представляет собой сопротивление обмотки, L представляет собой индуктивность обмотки; φd представляет собой магнитный поток связи магнита; ω представляет собой угловую скорость ротора (в электрическом угле), θ представляет собой положение магнитного полюса ротора; и p представляет собой оператор дифференцирования. Поскольку уравнение (1) обрабатывают во вращающейся системе координат, матрица импеданса первого слагаемого правой части уравнения (1) содержит составляющую ω∧L, соответствующую двигательной электродвижущей силе, возникающей вследствие магнитного потока, формируемого током обмотки. Напротив, с уравнением (6) работают в неподвижной системе координат, такая составляющая отсутствует, поэтому уравнение является еще более простым.
[0057] В случае, когда дифференциальная составляющая в неподвижной системе координат напрямую преобразуется во вращательную систему координат, вращающуюся с угловой скоростью ω ротора, необходимо использовать приведенную ниже формулу преобразования, в векторном исчислении, в которой ортогональные векторы угловой скорости заданы в координатной системе α-β. А именно, необходимо учесть слагаемое двигательной электродвижущей силы магнитного потока реакции якоря в строгой системе дифференциальных уравнений, учитывающей изменение фазы, используемое для преобразования вращательных координат.
p i(d,q)+ω×i(α,β)=p i(α,β)
Однако информацию pi′γ, pi′δ о производной электрического тока во вращательной координатной системе на фиг. 2 получают при помощи дифференцирования в неподвижной системе координат и преобразования вращательных координат с использованием оценочной фазы θ∧ в тот момент времени преобразования вращательных координат, в котором отсутствует составляющая фазовых изменений.
[0058] Ниже приведено описание примера, в котором описанное выше реализовано с помощью вычислений с использованием дискретной системы. В дискретной системе вычисление производной электрических токов по осям αβ может быть аппроксимировано разностью в следующем уравнении.
[0059]

[0060] где t+ΔT представляет собой два момента времени измерения электрического тока, имеющих интервал ΔT, во время периода нулевого вектора напряжения, a Δiα, Δiβ представляют собой изменения электрического тока за временной интервал ΔT.
[0061] Чтобы использовать разности Δiα, Δiβ электрического тока для преобразования аппроксимированной дифференциальной составляющей вращательных координат, вычисляют оценочную фазу θ∧ для промежуточного момента времени между моментом времени t и моментом времени t+ΔТ и используют ее для преобразования вращательных координат. А именно, поскольку разности Δiα, Δiβ электрического тока уже содержат слагаемое ω×i(α,β), необходимо учесть скорость изменения оценочного угла θ∧ при преобразовании вращательных координат.
[0062] Физический смысл дифференциальной составляющей pi′γ, pi′δ, таким образом, отличается от уравнения (2), для нее нужно использовать уравнение (8). В координатной системе γ-δ, основанной на оценочной фазе θ∧, ее используют в уравнении (8) для учета фазовой ошибки относительно фактической фазы θ, θе=θ-θ∧.
[0063]

[0064] Остальная часть аналогична первому варианту осуществления настоящего изобретения, при этом изменение фазовой ошибки θе предполагают малым, и следовательно, ее дифференциальной составляющей пренебрегают. Во время периода нулевого вектора напряжения левая часть уравнения (8) становится нулевой, при этом уравнение превращается в уравнение (9) индуцированного напряжения.
[0065]

[0066] Фиг. 2 иллюстрирует конфигурацию, в которой индуцированное напряжение вычисляется с помощью уравнения (9), а угловая скорость вращения и положение магнитного полюса вычисляются аналогично первому варианту осуществления настоящего изобретения. Физический смысл упомянутой дифференциальной составляющей в неподвижной системе координат был описан на примере дискретной системы, так как в дискретной системы отсутствие изменения фазы более очевидно, по сравнению с аналоговыми системами. Очевидно, дифференцирование электрического тока и преобразование вращательных координат может реализовываться как с помощью аналоговой вычислительной схемы, так и с помощью цифровой схемы. Соответственно, во втором варианте осуществления настоящего изобретения вычисление производной электрического тока не ограничено дискретными системами.
[0067] В соответствии со вторым вариантом осуществления настоящего изобретения достаточно, чтобы преобразование вращательных координат выполнялось только в интервалах вычисления индуцированного напряжения, так как вычисление, соответствующее дифференцированию электрического тока, выполняют во вращающейся системе координат. Несмотря на удвоение количества преобразований координат из-за измерения электрического тока и дифференцирования электрического тока, процедура является более простой по сравнению со случаем, в котором выполняют последовательное преобразование вращательных координат.
Вариант №3 осуществления изобретения
[0068] В первом и втором вариантах осуществления настоящего изобретения индуцированное напряжение вычисляют на основе производной электрического тока в течение периода нулевого вектора напряжения. Это позволяет исключить влияние времени запаздывания и задержки срабатывания переключательного элемента, используемого в инверторе, так как изменение электрического тока измеряют в течение периода времени, в котором этот переключательный элемент не работает. Однако, если рассматривать ситуацию более строго, в конфигурации, в которой переключательные элементы, образующие инвертор, являются полупроводниковыми элементами, например, IGBT-транзисторами или диодами, на каждом элементе присутствует падение напряжения, поэтому выходное напряжение инвертора не равно нулю даже в течение периода нулевого вектора напряжения.
[0069] Для учета описанного выше третий вариант осуществления настоящего изобретения сконфигурирован в соответствии с иллюстрацией фиг. 3. Поскольку составляющая падения напряжения на переключательном элементе связана, как правило, с электрическим током, то выполняют вычисление этой составляющей падения напряжения на переключательном элементе и вводят коррекцию на основе измеренных значений составляющих трехфазного электрического тока. Данный вариант осуществления настоящего изобретения применим к любому из вариантов осуществления настоящего изобретения, проиллюстрированных на фиг. 1 и 2, однако особенно хорошо подходит для применения к варианту осуществления настоящего изобретения, показанному на фиг. 2, что проиллюстрировано на фиг. 3.
[0070] На фиг. 3 позицией 12 обозначена секция коррекции падения напряжения, которая принимает входной сигнал iu, iv, iw трехфазного электрического тока и определяет коррекции νceu(iu), νcev(iu), νcew(iu) падения напряжения относительно значений составляющих электрического тока на основе табличных данных. При этом в уравнении (10) выполняют преобразование во вращающуюся систему координат для получения коррекций νceγ, νceδ падения напряжения.
[0071]

[0072] Затем секция 5 вычисления индуцированного напряжения выдает двигательные электродвижущие силы еγ, eδ, при этом уравнение (9) превращается в уравнение (11) путем введения коррекций νceγ, νceδ напряжения.
[0073]

[0074] В случае, когда проиллюстрированный на фиг. 1 первый вариант осуществления настоящего изобретения модифицируют с использованием коррекций составляющих напряжения, секция 5 вычисления индуцированного напряжения для определения двигательных электродвижущих сил еγ, еδ выполняет вычисление согласно уравнению (12), вместо уравнения (3).
[0075]

[0076] В соответствии с данным вариантом осуществления настоящего изобретения, отличительная особенность, которая заключается в том, что вычисление электродвижущей силы основано на учете падения напряжения на полупроводниковом переключательном элементе, позволяет осуществлять нормальное управление в области до более низких скоростей вращения. При этом она позволяет повысить точность определения оценочной угловой скорости и положения магнитного полюса, а также уменьшает составляющую пульсации 6f оценочной угловой скорости и положения магнитного полюса, возникающей в результате падения напряжения на упомянутом элементе.
Вариант №4 осуществления изобретения
[0077] В третьем варианте осуществления настоящего изобретения обеспечена возможность стабильной работы в области до более низкой границы скорости за счет введения коррекции падения напряжения на полупроводниковых переключательных элементах. Однако, если элементы основной схемы инвертора имеют разброс параметров, то точная коррекция напряжений секцией 12 коррекции падения напряжения может быть невозможной. При этом, что касается коррекций νceγ, νceδ и составляющей электрического тока для вычисления падения напряжения на сопротивлении R обмотки, они могут становиться фактором, порождающим ошибку напряжения, если они не согласованы с информацией о производной электрического тока по времени.
[0078] Соответственно, четвертый вариант осуществления настоящего изобретения разработан для уменьшения факторов, вызывающих ошибки напряжения, за счет применения способов уменьшения ошибок, основанных на статистической обработке данных, и за счет выбора моментов времени для измерения электрического тока. Данный вариант осуществления настоящего изобретения ограничен дискретными системами. На фиг. 4 S0-S7 представляют собой моменты измерения электрического тока, a TS - период отсчета электрического тока.
[0079] Ниже рассмотрен случай, в котором измерения электрического тока выполняют в восьми моментах времени S0-S7 в одном периоде несущей. При низкой угловой скорости вращения амплитуда управляющего сигнала νu, νv, νw напряжения является малой, поэтому работа переключательного элемента трехфазного инвертора сосредоточена в периоде времени от S1 до S3 и в периоде от S5 до S7 вблизи средней точки треугольной волны несущей. В соответствии с этим, присутствуют два вида периода нулевого вектора напряжения, в котором все три фазы находятся в состоянии ON (включено) в периоде от S3 до S5, и в котором все три фазы находятся в состоянии OFF (выключено) в периоде от S7 до S9. Соответственно, во время этих двух типов периода нулевого вектора напряжения дважды выполняют измерение электрического тока и аналогово-цифровое преобразование - в моменты времени S3 и S5 или S7 и S9.
[0080] Например, если электрические токи, измеренные в моменты времени S3 и S5, обозначить как I3 и I5, то вычисленное значение разности, соответствующей производной электрического тока за этот период, выражается уравнением (13).
[0081]

[0082] Такое вычисление производной электрического тока реализуют при помощи вычисления разности после преобразования вращательных координат в первом варианте осуществления настоящего изобретения или реализуют при помощи преобразования вращательных координат после вычисления разности в неподвижной системе координат во втором варианте осуществления настоящего изобретения. Таким образом, в четвертом варианте осуществления настоящего изобретения измерение электрического тока выполняют с упреждением в множество моментов времени синхронно с несущей, и при необходимости, вычисление разности электрического тока выполняют на основе данных между отсчетами в двух точках, между которыми находится пик треугольной волны несущей. С целью управления электрическим током и значением электрического тока для вычисления падения напряжения на сопротивлении R, используют значения отсчетов электрического тока в синхронизации с несущей ШИМ-модуляции в моменты времени S0 и S4 в вершинах треугольной волны несущей. А именно, для измерения электрического тока и его производной, выбирают необходимые части и используют их для измерения электрического тока в множестве точек, синхронизованных с несущей ШИМ-модуляции. Типовой трехфазный инвертор сконфигурирован таким образом, чтобы переключательные элементы, например, IGBT-транзисторы, в которых установлены шесть диодов обратной проводимости, формировали три ветви. Во время периодов нулевого вектора напряжения двух описанных выше типов пути токов, циркулирующих через переключательные элементы, являются различными, поэтому разброс параметров переключательных элементов вызывает ошибки напряжения. Соответственно, с целью усреднения этих двух типов, для вычисления уравнений (11), (12) используют скользящее среднее двух измерений электрического тока в пиковой части и в нижней части треугольной волны несущей. Это позволяет, с помощью статистических методов, подавить составляющую ошибки напряжения.
[0083] Для падения напряжения, определяемого секцией 12 коррекции падения напряжения, и измеренного значения электрического тока, используемого для определения падения напряжения на сопротивлении R, может использоваться значение электрического тока, измеренное в моменты S0, S8 времени вблизи верхнего пика, или значения электрического тока, измеренные в момент S4 вблизи нижнего пика в нижней части несущей. Тем не менее, вместо измерения электрического тока в момент S4 времени может использоваться среднее измеренных значений тока в моменты S3, S5, или же среднее значение измерений электрического тока в моменты S7, S9 времени может использоваться вместо значения электрического тока, измеренного в момент S8 времени.
[0084] Фиг. 5 иллюстрирует результат моделирования в случае применения четвертого варианта осуществления настоящего изобретения, при этом фиг. 5А иллюстрирует угловую скорость, фиг. 5В иллюстрирует составляющие электрического тока по двум осям, фиг. 5С иллюстрирует крутящий момент, а фиг. 5D иллюстрирует разность между фактическим положением магнитного полюса и расчетным положением магнитного полюса. Фиг. 5 иллюстрирует случай, в котором крутящий момент нагрузки изменяется в момент t2 времени, а сигнал управления угловой скоростью изменяется в момент t6 времени. Несмотря на то, что обычно есть возможность точно вычислить положение и угловую скорость на основе электродвижущей силы только в области до около 5-10% от номинала, фиг. 5D показывает, что ошибка θе является очень малой, при этом есть возможность точно вычислить положение и угловую скорость, даже когда угловая скорость составляет менее 5% или пересекает 0%, переходя от нормального вращения к обратному вращению.
[0085] В соответствии с этим, в данном варианте осуществления изобретения: (1) обеспечено согласование по времени, так что дифференцирование основано на измерениях электрического тока на пике несущей или вблизи него, используемых в качестве измеренного значения электрического тока, или (2) используют среднее составляющих электрического тока в двух точках до и после пика для разности, аппроксимирующей производную электрического тока, вместо значения электрического тока, отсчитываемого синхронно на пике несущей. Это позволяет согласовывать дифференциальную составляющую электрического тока с электрическим током, используемым для коррекции νce напряжения и падения напряжения на сопротивлении R во времени, и следовательно, уменьшить влияние шума. Также это позволяет ослабить значимость разброса параметров полупроводниковых элементов с помощью статистических методов, при этом берут скользящее среднее значений электрического тока в течение двух типов периода нулевого вектора напряжения в пиковой части и в нижней части.
Вариант №5 осуществления изобретения
[0086] Секция 12 коррекции падения напряжения в третьем варианте осуществления настоящего изобретения, показанном на фиг. 3, использует табличные данные для составляющей падения напряжения, соответствующей измеренным значениям составляющих трехфазного электрического тока. Аналогично, в пятом варианте осуществления настоящего изобретения секция 12 коррекции падения напряжения использует табличные данные для вычисления составляющей падения напряжения. Однако пятый вариант осуществления настоящего изобретения сконфигурирован таким образом, что табличные данные могут задаваться индивидуально для каждой фазы, а также для каждой из полярностей - положительной и отрицательной. Это позволяет осуществлять более точную коррекцию, даже когда упомянутые полупроводниковые элементы имеют разброс параметров.
[0087] Соответственно, данный вариант осуществления настоящего изобретения позволяет выполнять коррекцию индивидуально в соответствии с разбросом параметров переключательных элементов, и следовательно, точно корректировать составляющую падения напряжения.
[0088] Согласно предшествующему описанию, в соответствии с настоящим изобретением оценочную фазу θ∧ вычисляют на основе сигналов iγ, iδ электрического тока и информации piγ, piδ о производной электрического тока в координатной системе γ-δ в течение периода нулевого вектора напряжения. Это позволяет вычислять индуцированное напряжение с устранением влияния времени запаздывания, и следовательно, позволяет осуществлять нормальное управление без использования датчиков положения в области до более низких скоростей вращения.






Мембранный модуль, мембранный блок и мембранное разделительное устройство
Мембранный блок и мембранное сепарационное устройство
Многоуровневое устройство преобразования мощности с фиксированной нейтральной точкой
Многоуровневый силовой преобразователь
Передвижное устройство преобразования энергии
Многоуровневое силовое преобразовательное устройство
Схема защиты для полупроводникового переключающего элемента и устройство преобразования мощности
Устройство для измерения параметров пересечений
Высоковольтный прямой силовой преобразователь переменного тока
Пакетный электрический двухслойный конденсатор
Мембранный модуль, мембранный блок и мембранное разделительное устройство
Мембранный блок и мембранное сепарационное устройство
Многоуровневое устройство преобразования мощности с фиксированной нейтральной точкой
Многоуровневый силовой преобразователь
Передвижное устройство преобразования энергии
Многоуровневое силовое преобразовательное устройство
Схема защиты для полупроводникового переключающего элемента и устройство преобразования мощности

