Результат интеллектуальной деятельности: ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ МНОЖЕСТВОМ УСТРОЙСТВ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области дистанционного управления и, более конкретно, к дистанционному управлению параметрами в диапазоне.
ОПИСАНИЕ СООТВЕТСТВУЮЩЕЙ ОБЛАСТИ ТЕХНИКИ
Многие управляющие приложения переходят от фиксированного режима управления (включено/выключено) к управлению уровнем на основе значения, обеспечивая непрерывное управление параметрами, имеющими значительный диапазон, такими как интенсивность освещения (затемнение), цвет, громкость и т.д. Традиционные системы одностороннего управления используют относительное управление с преимущественно постоянным шагом, т.е. они передают команды на управляемое устройство, давая ему указание увеличить или уменьшить значение параметра с постоянным шагом. Однако такое управление с постоянным шагом не обеспечивает управления синхронизацией множества устройств, которыми управляют одновременно. Синхронизация может, например, быть потеряна, если одно из устройств некорректно принимает одну или более управляющих команд, например, в случае плохих условий передачи, в то время как другие принимают корректно. Если это происходит, множество управляемых устройств возвращаются к синхронизации только когда достигнуты минимальное или максимальное значения параметров.
Для того чтобы преодолеть этот недостаток, другие системы управления используют управление с абсолютным значением, т.е. управляемые устройства незамедлительно обеспечиваются предполагаемой конечной точкой параметра операции управления. Однако абсолютное управление делает сложным, например, затемнение сцены из множества осветительных конструкций, так как они либо должны все находиться на одном уровне, что редко для сцен, либо каждая конструкция должна быть индивидуально опрошена на предмет старого значения параметра, и команда должна основываться на старом значении. Это требует использования сети с широкой полосой пропускания и малым временем ожидания для передачи команд, и прибор дистанционного управления должен понимать диапазон параметра управляемого устройства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предпочтительно предоставить систему и способ, дающие возможность синхронизированного управления с относительным значением множества устройств.
Чтобы лучшим образом разрешить эту задачу, согласно аспекту данного изобретения, предоставляется система, содержащая прибор дистанционного управления для управления множеством устройств, прибор дистанционного управления, содержащий:
- передатчик для передачи одинаковой последовательности команд индивидуально на каждое из множества устройств, при этом каждая из команд последовательности дает указание соответствующему устройству исполнять относительное увеличение или уменьшение его параметра на определенное значение, и
- контроллер для генерирования команд и управления передачей последовательности команд, при этом контроллер управляет передатчиком для повтора передачи команды на устройство в случае неприема подтверждающего сообщения от устройства.
Кроме того, система содержит множество устройств, управляемых прибором дистанционного управления, при этом каждое из устройств содержит:
- приемник для приема последовательности команд от прибора дистанционного управления, дающих указание устройству исполнять относительное увеличение или уменьшение его параметра на определенное значение,
- передатчик, и
- контроллер для управления исполнением относительного увеличения или уменьшения параметра, согласно значению каждой из команд последовательности и генерирования подтверждающего сообщения для (его) передачи передатчиком в случае корректного приема команды.
В результате двусторонней связи точка-точка между прибором дистанционного управления и устройствами все адресуемые устройства остаются в синхронизации без необходимости для прибора дистанционного управления иметь информацию о текущем значении управляемого параметра устройств. Система согласно изобретению может быть преимущественно применена для домашней автоматики, где синхронизация между управляемыми устройствами является проблемой, например для затемнения световых сцен, управления занавеской или солнцезащитной шторкой и т.д. Относительное управление параметром обеспечивает "абстрактность" между прибором дистанционного управления и управляемым устройством, т.е. прибор дистанционного управления не нуждается в информации о параметре, которым он управляет. В результате система согласно изобретению легко расширяема для новых типов управляемых устройств, без необходимости адаптировать прибор дистанционного управления.
Кроме того, требования касательно полосы пропускания и времени ожидания среды передачи, используемой для передачи команд от прибора дистанционного управления на множество управляемых устройств, не такие высокие, как для случая управления с абсолютным значением с индивидуальным опросом, что обеспечивает возможность использования беспроводной среды передачи для передачи команд.
Согласно варианту осуществления изобретения, контроллер прибора дистанционного управления управляет передатчиком, чтобы передать команду последовательности на каждое из множества устройств до начала передачи следующей команды последовательности. В случае неприема подтверждения от одного или более устройств после передачи команды команду передают сначала на все устройства, на которые команда еще не была передана, и затем повторяют передачу команды на одно или более устройств, из которых не было принято подтверждение. В результате минимизируют время ожидания передачи команды на устройства, от которых принято подтверждение.
Согласно дополнительному варианту осуществления изобретения, контроллер прибора дистанционного управления управляет значением увеличения или уменьшения, указанным командами, как функцией периода времени, необходимого для передачи одной или более команд последовательности команд на каждое из множества устройств. Это период времени зависит от условий среды передачи, используемой для передачи команд. В случае плохих условий передачи повторная передача команд происходит гораздо чаще, так что время, необходимое для передачи одной или более команд на каждое из множества устройств, будет больше. Кроме того, он зависит от количества устройств, которым управляют.
Значение относительного увеличения или уменьшения может быть пропорционально периоду времени. Так, если период времени является длительным, то значение относительного увеличения или уменьшения является большим, и если период времени является коротким, то значение относительного увеличения или уменьшения будет небольшим. В результате, значение управляемого параметра увеличивается или уменьшается как функция времени, приближенно соответствующая заранее заданной крутизне, независимо от периода времени, необходимого для передачи одной или более команд на каждое из множества устройств. Следовательно, управление является относительно нечувствительным к колебаниям в условиях среды передачи, используемой для передачи команд, равно как и к количеству устройств, которыми управляют.
В случае первоначальной команды, еще не доступны измерения периода времени, которые необходимы для передачи команды на все управляемые устройства. Следовательно, контроллер управляет значением относительного увеличения или уменьшения, указанного командой, на основе условий среды передачи (либо статистических, либо измеренных текущих условий передачи), через которую команда будет передана, и на основе количества устройств, на которые команда будет передана.
В случае команд, следующих за первоначальной командой, контроллер предпочтительно управляет значением относительного увеличения или уменьшения на основе контролируемого периода времени, необходимого для передачи одной или более предыдущих команд на множество устройств.
Согласно дополнительному варианту осуществления, в случае заключительной команды, контроллер устанавливает относительное увеличение или уменьшение в заранее заданное значение, например ноль. В этом случае управляемые устройства знают, что операция управления подошла к концу и что в течение этого времени прибором дистанционного управления не будут передаваться дополнительные команды.
Согласно еще одному дополнительному варианту осуществления, команды передают до тех пор, пока это требуется пользователем, например, посредством нажатия кнопки. Это приводит к естественному образу управления пользователем.
Если значение относительного увеличения или уменьшения согласно команде больше, чем пороговое значение, то контроллер управляемых устройств может сгладить относительное увеличение или уменьшение. Таким образом, большие скачки значений скрыты от пользователя.
Согласно еще одному дополнительному варианту осуществления, контроллер управляемых устройств управляет исполнением относительного увеличения или уменьшения согласно значению каждой из команд последовательности и коэффициенту масштабирования. Это обеспечивает возможность использования одиночного прибора дистанционного управления для управления параметрами, имеющими разные диапазоны значений (например, световая сцена и солнцезащитная шторка).
Согласно дополнительному аспекту изобретения, способ предоставлен для управления множеством устройств посредством прибора дистанционного управления, содержащий следующие этапы, выполняемые прибором дистанционного управления, на которых:
- вызывают передачу одинаковой последовательности команд индивидуально на каждое из множества устройств, при этом каждая из команд последовательности дает указание соответствующему устройству исполнять относительное увеличение или уменьшение его параметра на определенное значение, и
- повторяют передачу команды на устройство в случае неприема подтверждающего сообщения от устройства.
Согласно варианту осуществления, способ содержит следующие этапы, выполняемые одним из множества устройств, на которых:
- принимают последовательность команд от прибора дистанционного управления, дающих указание устройству исполнять относительное увеличение или уменьшение его параметра на определенное значение,
- управляют исполнением относительного увеличения или уменьшения параметра, согласно значению каждой из команд последовательности, и
- передают подтверждающее сообщение в случае корректного приема команды.
Предпочтительно, способ согласно изобретению реализован посредством компьютерной программы.
Компьютерная программа может быть осуществлена в считываемом компьютером носителе или программном носителе, который может переносить компьютерную программу.
Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на варианты осуществления, описанные в дальнейшем в этом документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным и его многочисленные задачи и преимущества будут более очевидны специалистам в данной области техники посредством ссылки на следующие чертежи, совместно с прилагающимся описанием, на которых:
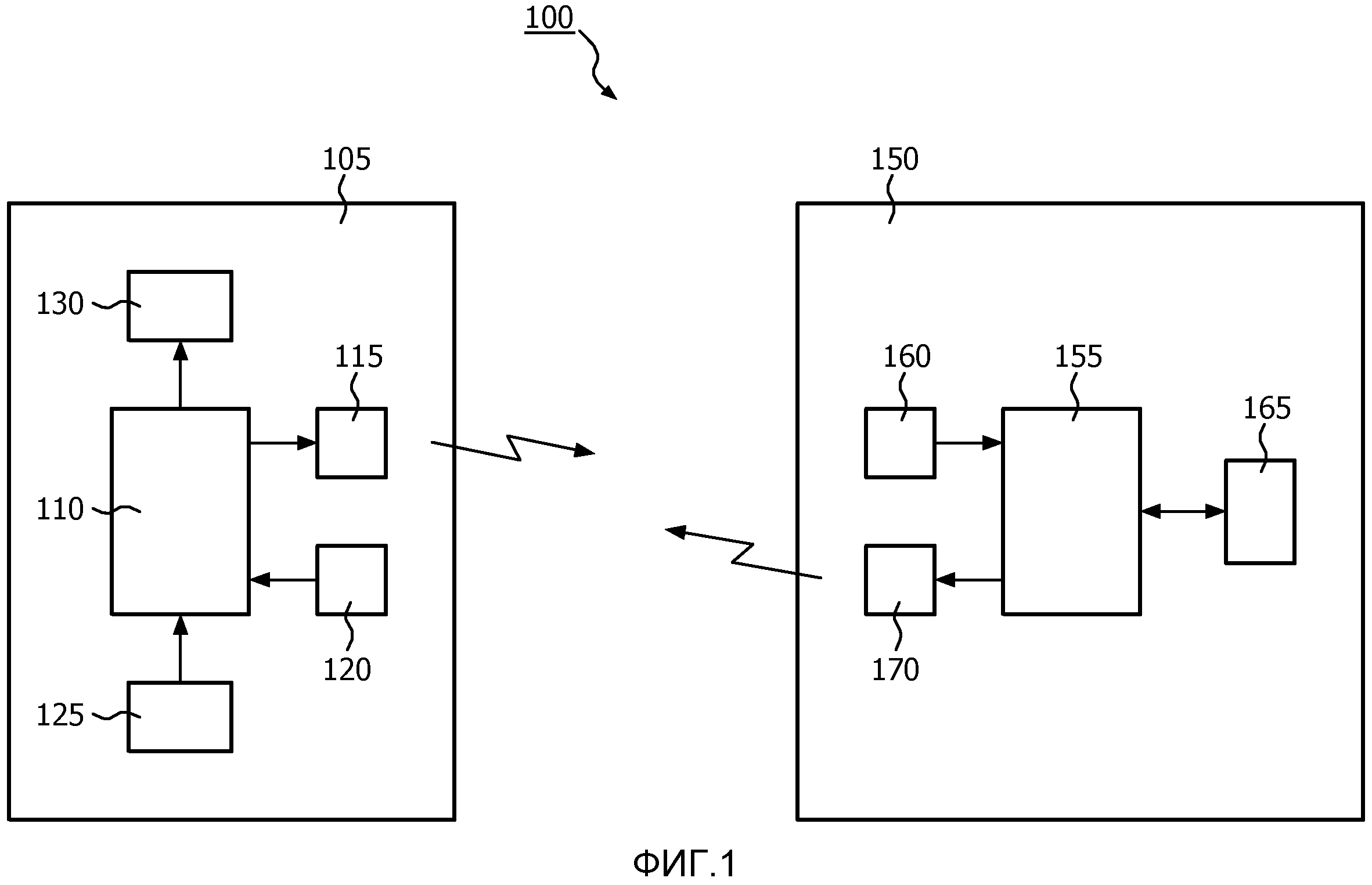
На Фиг.1 показана структурная схема системы дистанционного управления согласно примерному варианту осуществления настоящего изобретения.
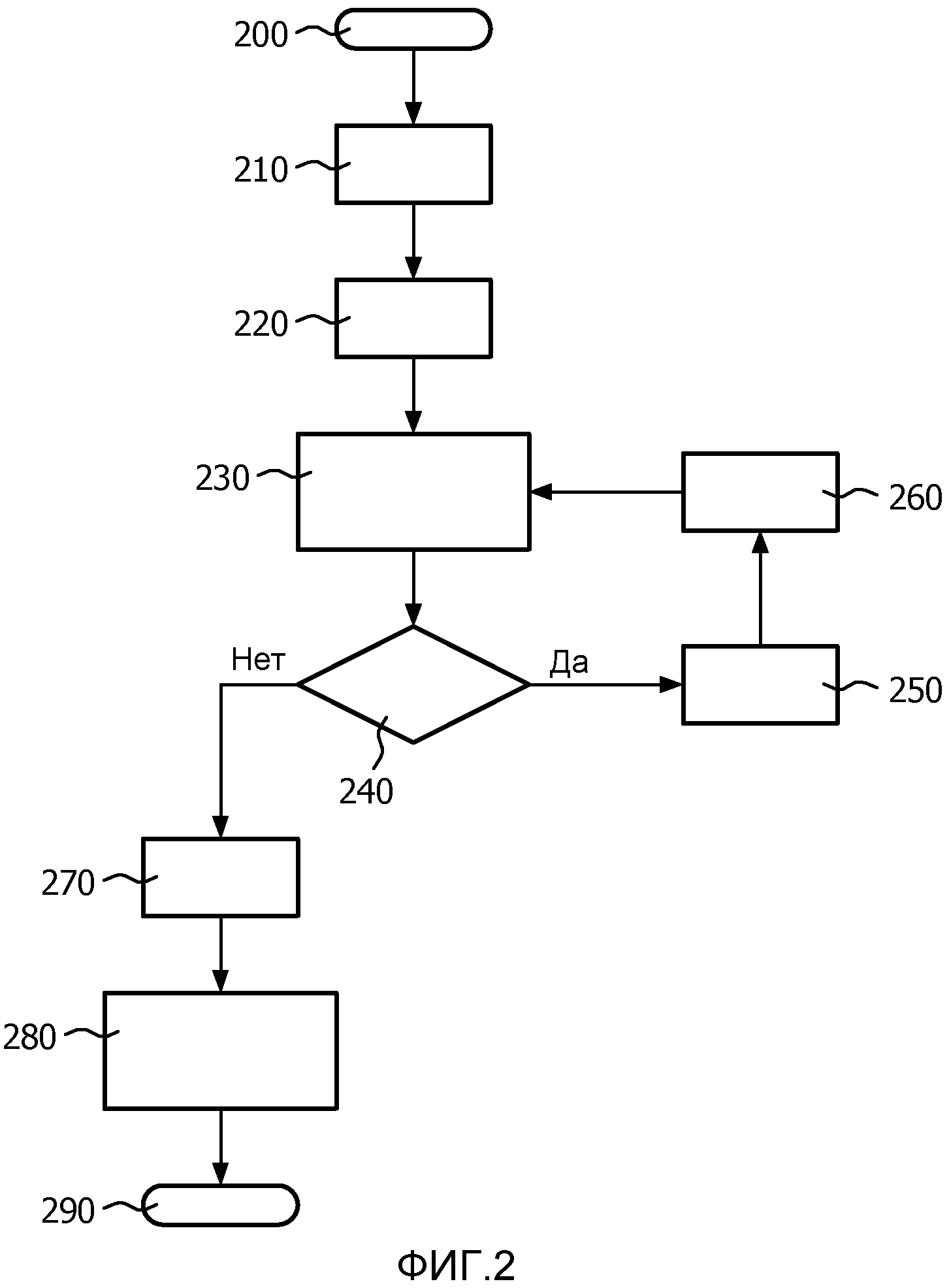
На Фиг.2 показана блок-схема, согласно примерному варианту осуществления изобретения, этапов для установки значения увеличения или уменьшения параметра команды.
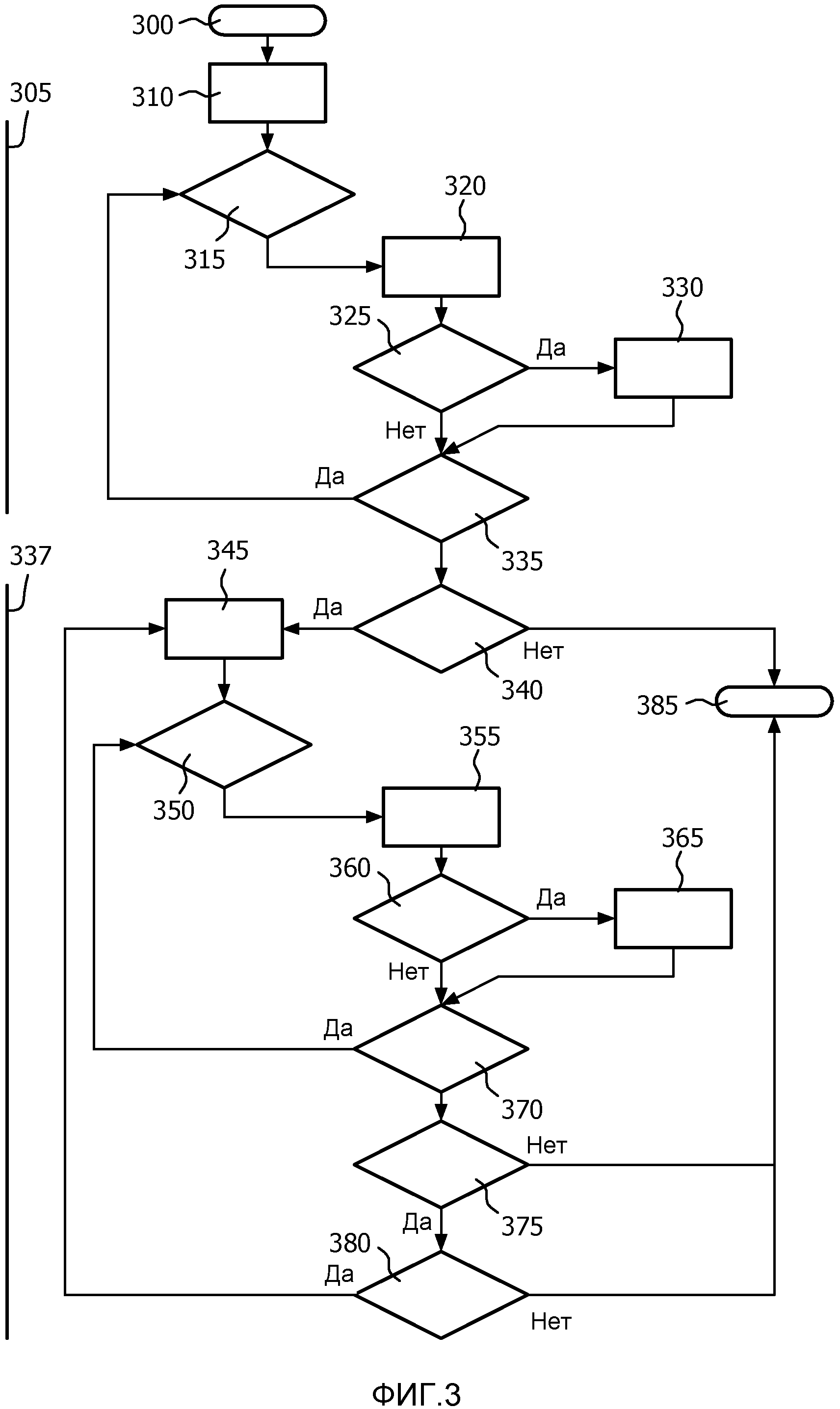
На Фиг.3 показана блок-схема, согласно примерному варианту осуществления изобретения, этапов для передачи команды от прибора дистанционного управления на управляемые устройства.
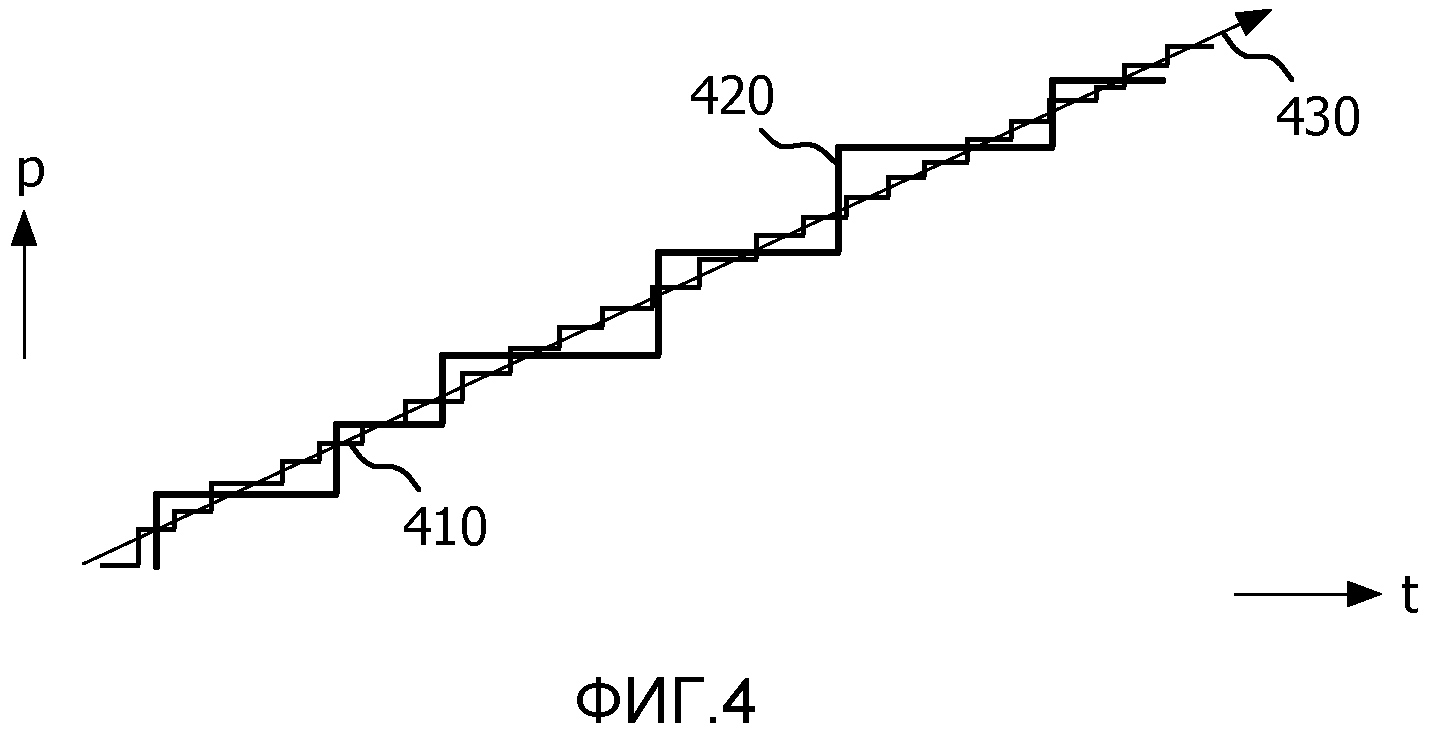
На Фиг.4 показано значение управляемого параметра как функция времени, согласно примерному варианту осуществления изобретения, для двух разных ситуаций.
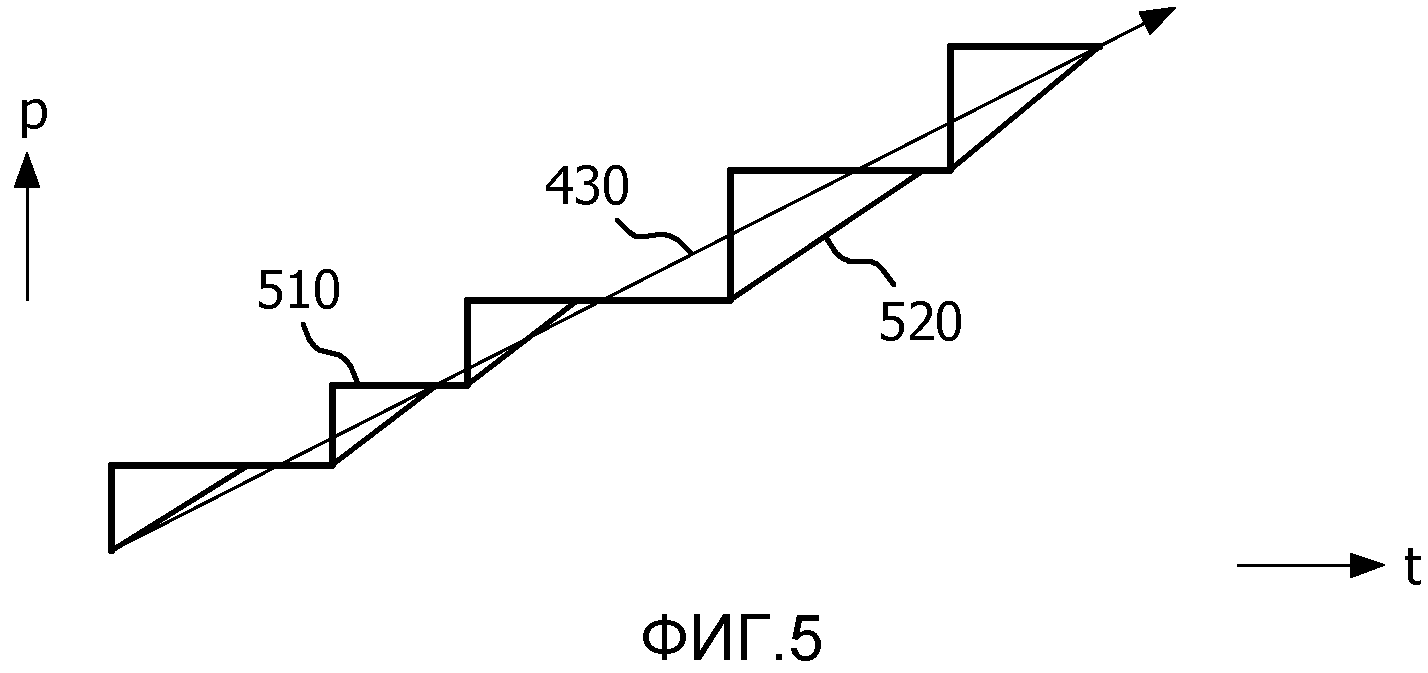
На Фиг.5 показано значение управляемого параметра как функция времени, согласно альтернативному примерному варианту осуществления изобретения.
На всех чертежах аналогичные ссылочные номера относятся к подобным элементам.
ПОДРОБНОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
На Фиг.1 показана структурная схема системы 100 согласно примерному варианту осуществления изобретения. Система содержит прибор 105 дистанционного управления, который содержит контроллер 110, предпочтительно процессор с ассоциированной памятью с загруженной в нее подходящей компьютерной программой, беспроводной передатчик 115, беспроводной приемник 120, средства 125 пользовательского ввода, такие как клавиши, и средства 130 пользовательского вывода, которые могут быть LED или дисплеем. Кроме того, система содержит множество управляемых устройств 150, которые в этом описании дополнительно называют как исполнительные механизмы, из которых показано только одно. Исполнительные механизмы 150 содержат контроллер 155, предпочтительно процессор с ассоциированной памятью с загруженной в нее подходящей компьютерной программой, беспроводной приемник 160, средства 165 для исполнения настройки параметра и беспроводной передатчик 170. Средства 165 содержат, например, схемы для затемнения осветительных конструкций, механизм для перемещения занавески или солнцезащитной шторки и т.д.
Беспроводные передатчики и беспроводные приемники прибора дистанционного управления и исполнительные механизмы осуществляют двустороннюю связь посредством беспроводной линии, например, в диапазоне 868 МГц.
На Фиг.2 показан примерный способ для определения значения увеличения или уменьшения параметра. Значение вставляют в команду, которую передают на каждое из управляемых исполнительных механизмов. По возникновению события пользовательского управления параметром, например нажатие кнопки пользователем (этап 200), оценивают ожидаемый период времени для передачи команды на каждый из управляемых исполнительных механизмов, в том числе возможные повторения (этап 210). Так как нет доступных измерений периода времени, необходимого для передачи предыдущих команд на все исполнительные механизмы, период времени прогнозируют на основе количества исполнительных механизмов для осуществления связи и/или последних известных условий передачи на эти исполнительные механизмы. На основе прогнозированного периода времени вычисляют (этап 220) первоначальное значение увеличения или уменьшения (размер шага). Команду с этим значением передают на все управляемые исполнительные механизмы (этап 230).
Передача одиночной команды на все адресуемые исполнительные механизмы подробно показана на Фиг.3. По возникновению события пользовательского управления параметром (этап 300) исполняют последовательность первоначальной передачи (этап 305). Сначала сбрасывают (этап 310) счетчик повторов. После оценки того, свободна ли среда передачи (этап 310), команду передают на первый исполнительный механизм в списке исполнительных механизмов (этап 320). Проверяют, подтверждена ли команда исполнительным механизмом (этап 325). Если это не так, определяют, остались ли какие-либо исполнительные механизмы в списке адресуемых исполнительных механизмов, куда еще (этап 335) не была передана команда. Если команда подтверждена, передача команды для исполнительного механизма отмечается как подтвержденная (этап 330) и процесс переходит к этапу 335. Если в списке адресуемых исполнительных механизмов остались какие-либо исполнительные механизмы, куда еще не была передана команда, то выбирают следующий в списке исполнительный механизм и повторяют этапы 315, 320, 325, 330 и 335. Это продолжается до тех пор, пока команда не будет передана на все исполнительные механизмы в списке.
Теперь начинают (этап 337) последовательность повторной передачи. Сначала проверяют, есть ли в списке какие-либо исполнительные механизмы, которые не были отмечены как подтвержденные (этап 340). Если это не так, процесс управления завершают (этап 385). Если остались исполнительные механизмы, которые не были отмечены как подтвержденные, то увеличивают счетчик повторов (этап 345). После оценки того, свободна ли среда передачи (этап 350), команду повторно передают на первый исполнительный механизм в списке исполнительных механизмов, не отмеченный как подтвержденный (этап 355). Проверяют, подтверждена ли команда исполнительным механизмом (этап 360). Если это не так, определяют остались ли какие-либо исполнительные механизмы, не отмеченные как подтвержденные, в списке адресуемых исполнительных механизмов, куда еще (этап 370) не была передана команда. Если команда подтверждена, передача команды для исполнительного механизма отмечается как подтвержденная (этап 365), и процесс переходит к этапу 370. Если в списке адресуемых исполнительных механизмов остались какие-либо исполнительные механизмы, не отмеченные как подтвержденные, куда еще не была повторно передана команда, то выбирают следующий в списке исполнительный механизм, отмеченный как подтвержденный, и повторяют этапы 350, 355, 360, 365 и 370. Это продолжается до тех пор, пока команда не будет повторно передана на все исполнительные механизмы в списке, не отмеченные как подтвержденные.
Затем определяют, остались ли еще в списке какие-либо исполнительные механизмы, которые не были отмечены как подтвержденные (этап 375). Если это не так, процесс управления завершают (этап 385). Если остались исполнительные механизмы, которые не были отмечены как подтвержденные, то определяют, является ли значение счетчика повторов меньше, чем максимальное число повторов (этап 380). Если это так, процесс управления возвращают к этапу 345. Если было достигнуто максимальное число повторов, процесс прерывают с ошибками (этап 385).
Теперь, ссылаясь снова на Фиг.2, после завершения передачи первоначальной команды на все адресуемые исполнительные механизмы (этап 230), определяют, должна ли продолжаться (этап 240) настройка параметров исполнительных механизмов, инициированная пользователем. Если это так, например, потому что пользователь продолжает нажимать кнопку, фактическое время сравнивают с прогнозированным временем, вычисленным на этапе 210 (этап 250). На основе этого и на основе целевой крутизны управляемого параметра (разъяснено более подробно со ссылкой на Фиг.4) вычисляют (этап 260) значение (размер шага) для вставки в следующую команду. В случае, в котором фактическое время больше, чем прогнозированное время, размер шага увеличивают. В случае, в котором фактическое время меньше, чем прогнозированное время, размер шага уменьшают. Следующую команду передают на все управляемые исполнительные механизмы (этап 230).
Альтернативные пути определения размера шага следующей команды, использующие прогнозированное время непосредственно для вычислений, а не разницу между фактическим временем и прогнозированным временем, быстро придут в голову специалиста.
Если настройка параметров исполнительных механизмов, инициированная пользователем, не должна продолжаться, например, потому что пользователь перестал нажимать кнопку, то итоговый размер шага устанавливают для завершения управления (этап 270). Этот размер шага имеет заранее заданное значение, например ноль, так что исполнительные механизмы знают, что для этой операции управления не будет каких-либо дополнительных команд. Команду с этим размером шага передают на все управляемые исполнительные механизмы (этап 280).
Показанную на Фиг.2 и 3 функциональность предпочтительно реализуют посредством подходящей компьютерной программы, загруженной в ассоциированную память процессора 110.
По приему команды с определенным размером шага от прибора 105 дистанционного управления процессор 155 каждого исполнительного механизма генерирует подтверждающее сообщение, которое передают обратно на прибор дистанционного управления посредством передатчика 170. Кроме того, процессор управляет средствами 165, так что настройку управляемого параметра исполняют согласно размеру шага команды.
Скорость настройки управляемого параметра исполнительных механизмов может быть нормализована, как показано на Фиг.4, изображающей значение P управляемого параметра как функцию времени t. Для ограниченного количества исполнительных механизмов и хороших условий передачи период времени, необходимый для передачи команды на все управляемые исполнительные механизмы, в том числе возможные повторные передачи, является относительно коротким. Это приводит к многочисленным настройкам с малыми шагами (кривая 410). С большими группами управляемых исполнительных механизмов и/или плохими условиями передачи (которые вызывают много повторных передач) период времени, необходимый для передачи команды на все управляемые исполнительные механизмы, является относительно длительным. Это приводит к меньшим настройкам с более крупными шагами (кривая 420). Однако обе кривые 410, 420 приблизительно следуют приближенному наклону кривой 430, представляющей нормализованную скорость настройки параметра. Таким образом скорость настройки остается более или менее постоянной, кроме экстремальных условий.
Размер шага равен периоду времени, необходимому для передачи команды на все управляемые исполнительные механизмы, умноженному на нормализованную скорость настройки.
Все управляемые исполнительные механизмы принимают одинаковые команды. Это поддерживает их синхронизированными на выходе, даже в случае разных условий передачи для разных исполнительных механизмов. Например, для солнцезащитных шторок или затемнителей это синхронное поведение является важным.
Так как верхний и нижний предел диапазона управляемого параметра известен, можно применять масштабирование для получения требуемого общего времени передачи от нижнего предела к верхнему пределу. Возьмем для примера затемнитель освещения с диапазоном от 0×20 до 0×FF. Он имеет общий диапазон в 224 единицы. В случае нормализованной скорости 50 единиц/секунда время передачи через весь диапазон исполнительного механизма без масштабирования должен приблизительно составить 4,5 секунды. Однако за счет применения масштабирования в исполнительном механизме может быть выбрано любое время передачи и любой желаемый диапазон любого устройства, которым управляет исполнительный механизм (например, затемнители света, элементы управления занавески и т.д.).
Для исполнительных механизмов, разработанных для работы в больших группах, таких как затемнители света, размер шага может стать большим и ясно видимым пользователю. Эта проблема может быть частично решена за счет сглаживания для уменьшения существенно больших размеров шага (больших, чем заранее заданное пороговое значение), используя линейно изменяющуюся скорость, равную или более быструю, чем нормализованная скорость 430 настройки. Эффект сглаживания показан на Фиг.5, где кривая 510 соответствует настройке параметра без сглаживания, а кривая 520 соответствует настройке параметра со сглаживанием.
Сглаживание все еще может приводить к периодическим остановкам в настройке управляемого параметра, но это скрывает большие скачки значений от пользователя.
При экстремальных условиях, таких как очень большое количество исполнительных механизмов и/или очень плохие условия передачи, возможно, что размер шага станет неприемлемо большим. Следовательно, предпочтительно ограничить максимальный размер шага до определенного значения, например до значения, соответствующего периоду времени 0,5 с, для передачи одиночной команды на все управляемые исполнительные механизмы.
Управление одним и тем же значением исполнительного механизма одновременно двумя контроллерами может привести либо к удвоению скорости управления в случае, в котором значение настраивают в том же направлении с помощью обоих контроллеров, либо приблизительно к отмене управляющих потоков, если контроллеры настраивают значение в противоположных направлениях. Для применений, где такое поведение не допустимо, должны быть предприняты предупредительные меры, чтобы предотвратить это. Например, команды, передающиеся контроллерами, могут быть обеспечены идентифицирующим полем, и исполнительный механизм может быть выполнен с возможностью, после начала операции управления некоторым прибором дистанционного управления, игнорирования команд от других приборов дистанционного управления, пока не завершится операция управления.
Описанную выше функциональность исполнительного механизма предпочтительно реализуют посредством подходящей компьютерной программы, загруженной в ассоциированную память процессора 155.
В то время как данное изобретение было проиллюстрировано и описано подробно в чертежах и вышеуказанном описании, такую иллюстрацию и описание принимают как иллюстративные и примерные, а не ограничивающие; данное изобретение не ограничено раскрытыми вариантами осуществления.
В этом отношении, следует отметить, что любая подходящая среда передачи может быть использована для осуществления связи между прибором дистанционного управления и исполнительными механизмами, такая как радиолинии, беспроводные радиосети, шины, проводные сети и т.д.
Другие изменения в раскрытых вариантах осуществления изобретения могут быть поняты и осуществлены специалистами в данной области техники при применении заявленного изобретения, от эскизов чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключает других элементов или этапов, а указание на единственное число не исключают множественности. Одиночный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт, что определенные меры перечислены в обоюдно разных зависимых пунктах формулы изобретения, не указывает на то, что сочетания этих мер нельзя использовать с пользой. Компьютерную программу можно хранить/распространять на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемом вместе или как часть другого аппаратного обеспечения, но можно также распространять в других формах, как, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылки в формуле изобретения не следует толковать в качестве ограничения (ее) объема.
Настоящее изобретение можно резюмировать, как следует: система и способ для управления множеством устройств посредством прибора дистанционного управления. Прибор дистанционного управления передает одинаковую последовательность команд на каждое из множества устройств для исполнения относительного увеличения или уменьшения их параметра на определенное значение. Для того чтобы поддерживать разные управляемые устройства в синхронизации друг с другом, существует двусторонняя связь между прибором дистанционного управления и устройствами. Устройства подтверждают корректный прием команды посредством передачи подтверждающего сообщения на прибор дистанционного управления. Прибор дистанционного управления повторяет передачу команды на устройство в случае неприема подтверждающего сообщения от устройства. В этом случае гарантируется, что все управляемые устройства принимают одинаковые команды и поддерживаются в синхронизации.
Подложка для опоры сенсоров, исполнительных элементов или электрических компонентов
Способ и устройство для проведения оптических исследований содержимого мутных сред
Визуализация ультразвуковых изображений с расширенным полем обзора с помощью двумерного матричного зонда
Оптическая сборка и автостереоскопическое устройство отображения на ее основе
Архитектура беспроводного сенсорного узла с автономной потоковой передачей данных
Переносной детектор рентгеновских лучей с воспринимающим решетку блоком и система получения рентгеновских изображений для автоматической настройки экспозиции для переносного детектора рентгеновских лучей
Устройство светоизлучающего диода
Устройство oled с покрытой шунтирующей линией
Устройство прозрачного органического светодиода
Способы и устройства для управления сетью

