Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ВОЗДУШНОЙ ЦЕЛИ ПО ЕЕ УСТАНОВЛЕННОЙ СКОРОСТИ
Вид РИД
Изобретение
Изобретение относится к области вооружения и может быть использовано в зенитных самоходных установках сухопутных войск в условиях неработоспособности системы измерения дальности радиолокационной системы (РЛС).
Наиболее близким по технической сущности к заявленному изобретению является способ, реализованный в зенитной самоходной установке (ЗСУ) 2С6М зенитного пушечно-ракетного комплекса (ЗПРК) 2К22 [1, 2, с.26-28].
ЗСУ 2С6М содержит гусеничное шасси ГМ-352, башню с ракетным и пушечным вооружением, силовые гидроприводы управления вооружением, РЛС, цифровую вычислительную систему (ЦВС), систему измерения углов качек, оптический прицел (ОП) с системой наведения и стабилизации, аппаратуру выделения координат ракеты и другие вспомогательные системы. Радиолокационная система включает радиолокационную станцию обнаружения и целеуказания (СОЦ), радиолокационную станцию сопровождения целей (ССЦ) и наземный радиолокационный запросчик.
Для стрельбы по воздушным целям в различных условиях воздушной и помеховой обстановки, а также в зависимости от наличия оптической видимости в ЗСУ 2С6М предусмотрены различные режимы работы [1]. Боевая работа на ЗСУ 2С6М в данных режимах происходит следующим образом [2, с.26-28].
В первом режиме, который называется «Все данные от радиолокационной системы» и который применяется при стрельбе зенитными автоматами, СОЦ осуществляет радиолокационным способом круговой обзор воздушного пространства. Информация об обнаруженных целях отображается на индикаторе кругового обзора (ИКО) в виде яркостных отметок. При отсутствии отметки «свой» от цели на экране индикатора кругового обзора СОЦ оператор ЗСУ совмещает маркер целеуказания с отметкой от цели. При этом ЦВС по положению маркера вырабатывает сигналы управления по азимуту и наклонной дальности и передает их на ССЦ. По этим сигналам антенна ССЦ устанавливается на указанный азимут (если рассогласование по азимуту превышает 50°, то гидропривод производит доворот башни), а строб дальности устанавливается на указанную наклонную дальность. Наблюдая на экране индикатора «дальность-азимут-угол места» видимое рассогласование между отметкой от цели и визирной линией, оператор вращает штурвал угла места. При этом система управления антенной формирует сигналы, управляющие наведением антенны ССЦ по углу места. Далее оператор, наблюдая на экране дальности видимое рассогласование между отметкой от цели и стробом дальности (визиром), вращением штурвала дальности совмещает визир с отметкой от цели. При этом строб дальности устанавливается на наклонную дальность D, соответствующую наклонной дальности до цели. После выполнения указанных действий оператор производит захват цели на автосопровождение по угловым координатам и наклонной дальности нажатием кнопки «Авт». После захвата цели и взятия ее на автосопровождение ЦВС рассчитывает точку встречи снаряда с целью и вырабатывает сигналы управления гидроприводами, по которым зенитные автоматы ЗСУ устанавливаются на линию выстрела.
Второй режим имеет наименование «Дальность от РЛС, угловые координаты - от оптического прицела». Режим применяется в условиях оптической видимости при стрельбе ракетой или зенитными автоматами. В этом режиме оператор производит захват цели на автосопровождение по наклонной дальности, как в первом режиме. Сопровождение цели по угловым координатам осуществляет наводчик, который, наблюдая цель в оптический прицел, совмещает прицельную марку с видимым силуэтом воздушной цели. Прицельная марка представляет собой две концентрические окружности различного диаметра. Силуэт воздушной цели должен находиться в пределах окружности малого диаметра. В случае отклонения силуэта воздушной цели от прицельной марки наводчик сдвигает ручку кнюппельного механизма в направлении и на величину, соответствующую данному отклонению. При этом система наведения оптического прицела формирует сигналы, управляющие угловым положением оптической оси оптического прицела. Наклонная дальность (от РЛС) и угловые координаты (от оптического прицела) поступают в ЦВС. На основании учета закона изменения дальности и угловых координат в течение некоторого промежутка времени и в предположении прямолинейности движения цели рассчитывается точка встречи снаряда с целью и вырабатываются сигналы управления гидроприводами. В этом режиме возможна стрельба ракетой. При этом команды наведения формируются ЦВС и передаются на ракету антенно-волноводной системой станции сопровождения целей.
Третий режим называется «Инерционное сопровождение». Сферические координаты цели (при сопровождении цели в первом или втором режимах) поступают в ЦВС, где производится экстраполяция траектории цели. При этом также используется гипотеза о равномерном и прямолинейном движении цели. В связи с накоплением (т.е. постепенным увеличением) ошибок сопровождения воздушной цели по угловым координатам и дальности данный режим действует 20 с, а затем автоматически отключается.
Четвертый режим носит название «Определение дальности цели по ее установленной скорости». Данный режим применяется в случае выхода из строя систем измерения дальности, входящих в состав ССЦ и СОЦ, или при постановке помех, приводящих к неработоспособности указанных РЛС. В этом режиме воздушную цель наблюдают в оптический прицел, а затем визуально (т.е. по видимому силуэту цели) определяют ее тип. Понятно, что режим работоспособен только в условиях хорошей видимости воздушной цели и различения элементов ее планера. По типу цели (с учетом опыта сопровождения целей и знания типовых значений скорости полета конкретной цели на определенной высоте) определяют ее скорость. Для этого наводчик до начала работы по целям должен обладать знаниями о значениях скоростей типовых самолетов вероятного противника. Получение таких знаний является выполнимой задачей. Так, например [3], максимальная скорость самолета F-15A на высоте 12 км составляет 2650 км/ч, а на высоте 300 м - 1470 км/ч. Посадочная скорость такого самолета равна 220 км/ч, а скорость отрыва при взлете - 260 км/ч.
Самолет тактической авиации А-10-А (США) имеет следующие характеристики [4]: боевая скорость полета у земли - 725 км/ч; скорость полета на высоте 1500 м (с шестью авиабомбами) - 710 км/ч; крейсерская скорость на малых высотах - 550 км/ч. Многоцелевой самолет «Фантом» F-4E обладает диапазоном скоростей полета 200-2350 км/ч [5]. А истребитель МиГ-19С имеет следующие летно-технические характеристики: максимальная скорость на высоте 10 км - 1450 км/ч; полетная скорость с грузом на наружных подвесках - 950 км/ч. Таким образом, для всех типовых целей имеются данные о возможных скоростях их полета при определенных условиях.
Описываемый режим является вспомогательным и применяется в случае невозможности измерить наклонную дальность до цели. Эффективность стрельбы автоматами в данном режиме намного ниже, чем в других режимах. Однако даже такая стрельба в определенной мере снижает результативность наносимых авиацией противника бомбово-ракетных ударов.
Значение скорости цели, соответствующее ее типу в определенных условиях, будем называть установленной скоростью. Установленную скорость вводят в цифровую вычислительную систему методом набора ее численного значения на цифровом табло с помощью клавиатуры. Наводчик сопровождает цель в оптический прицел таким же способом, как во втором режиме. При этом азимут β и угол места ε оптического прицела (соответствующие угловым координатам цели) с датчиков положения оптического прицела поступают в ЦВС. По установленной скорости и угловым координатам в последовательные моменты времени ЦВС по известным формулам [6] рассчитывает значения наклонной дальности D до цели.
Сущность способа, реализованного в четвертом режиме работы ЗСУ, заключается в следующем [2, с.27-28]. После обнаружения воздушной цели непрерывно наблюдают эту цель в оптический прицел. В случае отклонения силуэта воздушной цели от прицельной марки (представляющей две концентрические окружности) сдвигают ручку (кнюппель) датчика команд в направлении, соответствующем смещению силуэта цели. При этом система наведения оптического прицела формирует сигналы, соответствующие направлению и пропорциональные величине сдвига кнюппеля. Эти сигналы поступают в следящую систему, которая с помощью электропривода изменяет угловое положение оптической оси прицела. Воздействием на кнюппель датчика команд совмещают прицельную марку с силуэтом воздушной цели. Визуально определяют тип воздушной цели и соответствующую этому типу среднюю скорость (так называемую установленную скорость) такой воздушной цели. С помощью цифровой клавиатуры вводят значение скорости цели (установленную скорость) в ЦВС. С помощью датчиков, связанных с приводом оптического прицела, в последовательные моменты времени (с интервалом 1 с) измеряют угол места ε и азимут β линии визирования воздушной цели, которая в моменты времени ti-1 и ti перемещается из точки A1 в точку А2 (фиг.1).
С помощью ЦВС рассчитывают наклонную дальность Di воздушной цели в i-й момент времени с использованием введенной (с помощью цифровой клавиатуры) в ЦВС величины установленной скорости Vy воздушной цели и приращения угловых координат линии визирования по известным формулам [6, с.54-55]:
где εi, εi-1, βi, βi-1 - значения угла места ε и азимута β линии визирования в i-й и соответствующий (i-1)-й моменты времени, рад; di - горизонтальная дальность воздушной цели в i-й момент времени, м; Vy - установленная скорость воздушной цели, м/с; Di - наклонная дальность воздушной цели в i-й момент времени, м; Δt - интервал времени между соседними измерениями, с.
Взаимное расположение ЗСУ (точка О) и цели в горизонтальной плоскости изображены на фиг.2. Каждой ЗСУ старшим начальником назначен сектор ответственности, в пределах которого ЗСУ ведет поиск и уничтожение воздушных целей. Сектор ответственности определяется угловым положением левой и правой границ сектора относительно северного направления.
Последовательность операций известного способа не учитывает угол курса цели Qc (угол, отсчитываемый по часовой стрелке от северного направления до горизонтальной проекции вектора скорости самолета). Поскольку информация об угле курса Qc цели в ЗСУ отсутствует, то всегда ранее предполагалось, что вектор скорости воздушной цели параллелен биссектрисе сектора ответственности (т.е. предполагалось, что ЗСУ ведет работу по воздушным целям, летящим только в сторону позиции расположения ЗСУ).
Однако воздушные цели могут иметь произвольный угол курса Qc. Для характеристики углового положения вектора скорости воздушной цели относительно биссектрисы сектора ответственности введем понятие угла скоса воздушной цели. Угол скоса цели (α) - это острый угол, отсчитываемый от биссектрисы сектора ответственности до горизонтальной проекции вектора скорости воздушной цели. Отсчет по часовой стрелке определяет отрицательные значения углов скоса, отсчет против часовой стрелки - положительные значения. Так, на фиг.2 воздушная цель Ц1 движется с углом скоса α=0, а цель Ц2 - с положительным углом скоса α≠0. Величина угла скоса α определяется по формуле

где θ - угол между северным направлением и продолжением биссектрисы сектора ответственности (сектор ответственности для каждой ЗСУ определяется старшим начальником), проведенным через точку стояния ЗСУ (точка О) в сторону, противоположную нахождению воздушной цели; Qc - значение угла курса воздушной цели (фиг.2).
Как видно из чертежа, при равных величинах скоростей воздушных целей и равных угловых скоростях линии визирования, но различных углах скоса α, реальная горизонтальная дальность до цели будет различной. То есть неучет курсового угла воздушной цели приводит к ошибке определения дальности до этой воздушной цели.
Во всех режимах наличие информации о наклонной дальности D до воздушной цели является необходимым условием для подготовки стрельбы, так как по дальности и угловым координатам с помощью ЦВС рассчитывают координаты точки встречи снаряда или ракеты с целью. При отсутствии информации о наклонной дальности до цели D координаты точки встречи могут быть рассчитаны неверно, что приведет к значительному отклонению трасс снарядов от воздушной цели. В результате стрельба ЗСУ зенитными автоматами будет неэффективной.
Оценим погрешность известного способа [2, с.27-28] определения наклонной дальности воздушной цели по ее установленной скорости. Для этого выведем выражение для горизонтальной дальности воздушной цели, учитывающее направление вектора скорости воздушной цели (наклонную дальность D легко определить, зная горизонтальную дальность d и угол места ε). Пусть воздушная цель движется из точки A1 в точку А2 со скоростью V и известным углом скоса α (фиг.3). Скорость цели определяется по ее типу и называется установленной скоростью Vy.
Значения азимута β1 и β2 (относительно северного направления) воздушной цели в последовательные моменты времени ti-1 и ti измеряют с помощью оптического прицела с периодичностью Δt=1 с. В ходе двух смежных измерений образуется треугольник OA1A2, в котором известны сторона VyΔt (при Δt=1 с сторона будет равна Vy) и все углы. На схеме показан угол θ, отсчитываемый от северного направления до продолжения биссектрисы сектора ответственности, проведенной через точку стояния ЗСУ в сторону, противоположную нахождению воздушной цели. Требуется определить сторону d2 (горизонтальную дальность до воздушной цели в конечный момент измерения). Используя теорему синусов, получаем:

где Δβ=β2-β1 (приращение угла визирования); Δt - период измерения угловых координат, равный 1 с.
Отсюда получаем выражение для конечной наклонной дальности вида

При угле скоса воздушной цели α=0, угле визирования β1=10°, угле θ=π, скорости воздушной цели Vy=2000 км/ч и приращении угла визирования Δβ=1° горизонтальная дальность до воздушной цели составит d2=5500 м.
Если угол скоса будет равен α=20° (который не учитывается известным способом), то при тех же исходных данных горизонтальная дальность до воздушной цели составит d2=16000 м. То есть ошибка измерения горизонтальной дальности только за счет неучета величины угла скоса α составляет δd=10500 м. Если ошибка в определении скорости воздушной цели составляет 600 км/ч (то есть, к примеру, реальная скорость воздушной цели равна 1400 км/ч, а введена в ЦВС скорость 2000 км/ч), то при α=0 горизонтальная дальность до воздушной цели составит d2=3800 м. То есть ошибка измерения горизонтальной дальности δd только за счет ошибки определения скорости воздушной цели δV составляет δd=1700 м.
На основании вышеизложенного ошибка в определении наклонной дальности до воздушной цели известным способом [2, с.27-28] соизмерима с размерами зоны поражения зенитными автоматами (дальняя граница зоны поражения составляет 4000 м), что сводит эффективность поражения воздушной цели к минимуму.
Таким образом, способ-прототип [2, с.27-28] имеет следующие недостатки.
1. Значительная погрешность определения наклонной дальности до воздушной цели, обусловленная неучетом угла курса воздушной цели.
2. Существенная погрешность определения величины наклонной дальности до воздушной цели, обусловленная ошибкой определения ее скорости по силуэту.
Задачей предлагаемого изобретения является разработка более совершенного способа определения по величине установленной скорости воздушной цели ее наклонной дальности в условиях неработоспособности радиолокационной системы измерения дальности.
Поставленная задача может быть решена на основе введения в ЗСУ 2С6М аппаратуры приема и реализации целеуказания, обеспечивающей получение данных целеуказания от подвижного пункта разведки и управления (ППРУ). Принцип построения и функционирования данной аппаратуры известен и описан, например, в [7, с.13а-38].
При реализации предлагаемой модернизации порядок работы ЗСУ по целям соответствующим образом изменится. Подвижный пункт разведки и управления будет вести разведку воздушных целей и измерять их линейную скорость V и угол курса Qc воздушной цели. Данная информация в виде двух числовых величин будет передаваться по радиолинии [8] с помощью аппаратуры приема и реализации целеуказания на ЗСУ. Измеренная ППРУ линейная скорость цели V имеет смысл установленной скорости Vy, описанной ранее. Разница в том, что при известном способе скорость цели определяется визуально по силуэту цели, а при предлагаемом новом способе скорость цели измеряется ППРУ, что предполагается его предназначением. Поэтому измеренную ППРУ линейную скорость цели также будем называть установленной скоростью Vy.
С помощью оптического прицела ЗСУ измеряются угловые координаты воздушной цели. На основе данных о линейной скорости Vy, угла курса Qc и приращения угловых координат воздушной цели в последовательные моменты времени ЦВС рассчитывает наклонную дальность до этой воздушной цели. Для вывода формулы расчета наклонной дальности рассмотрим схему движения воздушной цели в горизонтальной плоскости (фиг.4). Воздушная цель движется из точки A1 в точку А2 со скоростью Vy. Значения азимута воздушной цели в точках A1, A2 - соответственно β1, β2. Поскольку съем координат производится с интервалом 1 с, то расстояние между точками A1, А2 тождественно равно Vy. Получаем треугольник OA1A2, где сторона OA2=d - горизонтальная дальность воздушной цели в конечной точке. Эту дальность и требуется определить (вычислить).
Согласно теореме синусов получаем

Угол γ определяется по формуле

Таким образом, горизонтальная дальность воздушной цели d определяется по формуле

Наклонная дальность цели D определяется в соответствии с выражением (4)
Далее наклонная дальность воздушной цели используется для решения задачи встречи снаряда с целью так же, как в известном способе в штатном режиме [6, с.58-64].
Поскольку угол курса Qc воздушной цели известен (измерен с помощью ППРУ), а азимут воздушной цели определяется оптическим прицелом относительно северного направления, то необходимость использования угла скоса α отпадает.
Определим погрешность вычисления наклонной дальности предлагаемым способом.
Примем погрешность измерения скорости Vy и угла курса Qc воздушной цели типичными для РЛС сопровождения цели: δV=10 км/ч и δα=1°. Тогда при α=10°, Vy=2000 км/ч наклонная дальность воздушной цели составит 10 км, а при α=11°, Vy=2010 км/ч дальность составит 11400 м. То есть погрешность вычисления дальности составляет δd=1400 м, что значительно меньше, чем погрешность, обеспечиваемая известным способом.
Предлагаемый способ осуществляют следующим образом.
1. Подвижный пункт разведки и управления (ППРУ) командного пункта зенитного дивизиона (КП здн) ведет разведку воздушных целей и измеряет их линейную скорость Vy и угол курса Qc цели. В случае движения воздушной цели (группы целей) в сторону ЗСУ, работающей в четвертом режиме, ППРУ передают на данную ЗСУ с помощью аппаратуры передачи целеуказания по радиолинии [8] значения установленной линейной скорости Vy и угла курса Qc цели (группы целей).
2. В состав ЗСУ вводят аппаратуру приема и реализации целеуказания, сопряженную (связанную информационно) с аппаратурой передачи целеуказания, установленной на ППРУ [9]. Аппаратура приема и реализации целеуказания может по своему составу и принципу действия быть аналогична описанной в [7].
3. Принятые с помощью аппаратуры приема и реализации целеуказания значения установленной скорости Vy и угла курса Qc перенаправляют в ЦВС.
4. При появлении на индикаторе кругового обзора отметки от воздушной цели совмещают маркер целеуказания (отображаемый на ИКО в виде светящейся риски) с отметкой от цели. Для передвижения маркера управляют ручкой кнюппельного механизма. При этом с помощью ЦВС по положению маркера вырабатывают сигналы управления по азимуту и передают их в следящую систему оптического прицела. По этим сигналам оптическую ось прицела с помощью электропривода устанавливают на указанный азимут β (соответствующий положению маркера целеуказания).
5. Наблюдают в окуляр оптического прицела сканирование прицельной марки по углу места [2, с.178-179]. При появлении цели в поле зрения нажимают кнопку ПОИСК и, воздействуя на кнюппель датчика команд, удерживают прицельную марку на цели. При этом с помощью датчиков следящей системы оптического прицела измеряют азимут β и угол места ε воздушной цели.
6. Азимут и угол места цели в виде электрических сигналов передают в ЦВС, где рассчитывают наклонную дальность воздушной цели D по следующим формулам:

где εi, εi-1, βi, βi-1 - значения угла места ε и азимута β линии визирования в i-й и соответствующий (i-1)-й моменты времени, рад; di - горизонтальная дальность воздушной цели в i-й момент времени, м; Vy - установленная (измеренная с помощью ППРУ) скорость воздушной цели, м/с; Δt - интервал времени между соседними измерениями, с.
Предлагаемый способ отличается от известного способа [2, с.27-28] подходом к определению горизонтальной дальности d до воздушной цели, учитывающим величину угла курса Qc воздушной цели, полученную от ППРУ.
Таким образом, применение нового способа позволит существенно повысить точность измерения наклонной дальности до воздушной цели при неработоспособной системе измерения дальности РЛС или в условиях интенсивных помех, не позволяющих измерять наклонную дальность. Повышение точности измерения наклонной дальности, в свою очередь, обеспечивает повышение эффективности поражения воздушных целей за счет более точного определения точки встречи снаряда с целью [10]. Данный способ можно применять и в других зенитных комплексах, где в сложных условиях помеховой обстановки невозможно или затруднено измерение дальности до воздушной цели.
Для реализации нового способа необходимо:
ввести в состав ЗСУ аппаратуру приема и реализации целеуказания, аналогичную [7];
изменить штатные формулы расчета ЦВС наклонной дальности D на формулы (11)-(12).
Способ определения наклонной дальности воздушной цели по ее установленной скорости является реализуемым в зенитных пушечно-ракетных комплексах, поскольку не предполагает разработки новой аппаратуры приема и реализации целеуказания, а основывается на использовании существующей аппаратуры [7], а также предполагает использование радиолокационной информации от существующего ППРУ. Кроме того, способ основывается на изменении формул, по которым осуществляется обработка информации.
Преимущество предлагаемого способа заключается в существенном увеличении точности определения наклонной дальности D цели (при работе в четвертом режиме), что повышает точность определения точки встречи снаряда с целью, что, в конечном итоге, повышает эффективность обстрела воздушной цели. Применение в ЗСУ 2С6М и подобном ему изделии предложенного способа позволит без существенных затрат повысить эффективность обстрела воздушной цели.
Источники информации
1. Зенитная самоходная установка ЗСУ 2С6М. Техническое описание. 2С6М.00.00.000 ТО, 1991. 80 с.
2. Изделие 2С6М. Инструкция по эксплуатации. Часть 1. Боевая работа. 2С6М.00.00.000 ИЭ. 203 с. (с.27-28 - прототип).
3. Чеботарев И. Боевые возможности истребителя F-15A / Зарубежное военное обозрение. 1977. №7. С.48-53.
4. Ежов Н.И. Борьба с бронированными целями. Методическое пособие. - М.: Воениздат, 1977. 78 с. (С.56).
5. Чеботарев И. Боевое применение самолетов «Фантом» / Зарубежное военное обозрение. 1976. №5. С.51-56.
6. ПБА3.035.005 ТО. Цифровая вычислительная система 1А26М. Техническое описание. 116 с.
7. Изделие 9К35М2. Техническое описание и инструкция по эксплуатации. Часть 1. 9К35М2ТО. 51 с.
8. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями). Учебник для вузов. Разоренков Г.Н., Бахрамов Э.А., Титов Ю.Ф. / Под ред. Г.Н. Разоренкова. - М.: Машиностроение, 2003. 584 с.
9. Изделие 9С80М. Техническое описание и инструкция по эксплуатации. БГ2.399.056-01 ТО4. 1991. 182 с.
10. Стрельба зенитной артиллерии. Книга первая. М., Воениздат, 1958. 398 с.
Названия фигур
Фиг.1 - Схема вычисления наклонной дальности по установленной скорости цели
Фиг.2 - Измерение дальности до воздушной цели при различных углах курса
Фиг.3 - Определение дальности воздушной цели по установленной скорости
Фиг.4 - Графические пояснения к выводу формулы расчета наклонной дальности
Способ определения наклонной дальности воздушной цели по ее установленной скорости, включающий: наблюдение наводчиком зенитной самоходной установки 2С6М в оптический прицел воздушной цели, введение значения скорости воздушной цели в цифровую вычислительную систему, управление ручкой кнюппельного механизма и обеспечение тем самым постоянного совмещения прицельной марки с силуэтом цели, а также соответствующего совмещения оптической оси оптического прицела с положением воздушной цели с помощью следящей системы, управляемой сигналами кнюппельного механизма, съем значений угловых координат линии визирования с датчиков оптического прицела и передачу их в цифровую вычислительную систему в последовательные моменты времени с интервалом Δt, вычисление цифровой вычислительной системой наклонной дальности D воздушной цели по формуле ,где ε - значение угла места линии визирования цели в i-й момент времени; d - горизонтальная дальность воздушной цели в i-й момент времени; D - наклонная дальность воздушной цели в i-й момент времени, отличающийся тем, что в зенитную самоходную установку 2С6М дополнительно вводят аппаратуру приема и реализации целеуказания, сопряженную с аппаратурой передачи целеуказания подвижного пункта разведки и управления, перед расчетом наклонной дальности между зенитной самоходной установкой и воздушной целью ведут разведку воздушной цели подвижным пунктом разведки и управления, с помощью которого измеряют ее линейную скорость, именуемую установленной скоростью V, и угол курса Q, передают указанные данные на зенитную самоходную установку с помощью аппаратуры передачи целеуказания подвижного пункта разведки и управления, принимают аппаратурой приема и реализации целеуказания зенитной самоходной установки значения установленной скорости V и угла курса Q воздушной цели, а при расчете наклонной дальности D воздушной цели в i-й момент времени используют значение горизонтальной дальности d воздушной цели в i-й момент времени, вычисляемое по формуле ,где Δt - интервал времени между последовательными смежными измерениями азимутальных положений линии визирования воздушной цели; Δβ - приращение значения азимута линии визирования цели за интервал времени Δt между i-м и (i-1)-м моментами времени; β - значение азимута линии визирования воздушной цели в (i-1)-й момент времени; Q - угол курса воздушной цели.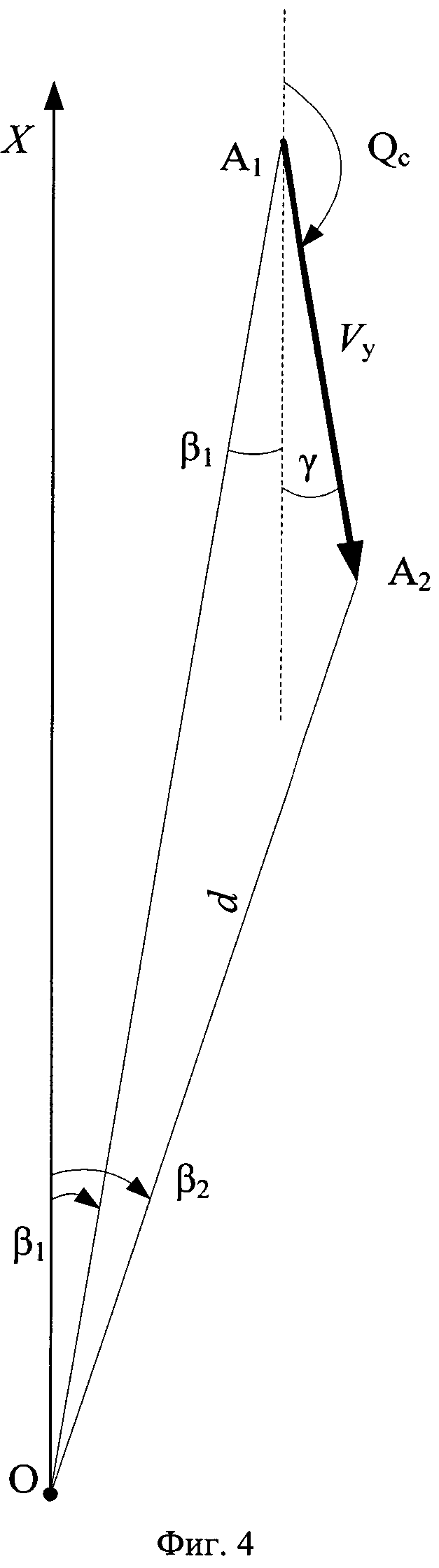

Способ управления зенитной управляемой ракетой средней дальности с активной головкой самонаведения при наведении на групповую сосредоточенную цель
Способ экспериментальной проверки информационных и идентификационных возможностей доплеровских портретов воздушных объектов
Способ однозначного измерения радиальной скорости цели в когерентно-импульсной радиолокационной станции
Система радиосвязи со сверхширокополосными сигналами
Способ комбинированного наведения летательного аппарата
Способ извлечения из доплеровских портретов воздушных объектов признаков идентификации с использованием метода сверхразрешения
Способ формирования импульсной характеристики воздушного объекта с повышенной информативностью на участках его пространственно-углового замирания
Способ оптимального поддержания скорости транспортного средства в режиме круиз-контроля
Способ организации комбинированного заграждения на маршруте движения вооружения и техники противника
Способ определения возможности дальнейшей эксплуатации зенитной ракеты на основе автоматизированного учёта информации о состоянии её бортовой аппаратуры
Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета
Радиолокационная станция с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков
Способ селекции движущихся целей в режиме поимпульсной перестройки несущей частоты
Способ оценивания уровня подготовленности отделения стрелков-зенитчиков на учебно-тренировочных средствах
Способ селекции имитаторов вторичного излучения воздушных объектов
Система обработки радиолокационной информации

