Результат интеллектуальной деятельности: ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ УПРАВЛЕНИЯ ЭЛЕРОНАМИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области приводов управления элеронами (аэродинамическими поверхностями) летательных аппаратов и может быть использовано при создании новых летательных аппаратов.
Для работы в системе многокомандного управления беспилотного летательного аппарата наиболее распространены исполнительные механизмы, где в качестве привода используются микродвигатели постоянного тока с постоянными магнитами. Главным требованием к таким передачам является малый люфт в подвижных соединениях, легкость перемещения. Микродвигатель, развивающий небольшой вращающий момент, вращает через редуктор с передаточным отношением 1:80-1:200 выходной вал исполнительного механизма. На выходном валу закреплена специальная качалка или диск для присоединения тяги управления рулями (Потапов В.Н., Хухра Ю.С. Пилотажные радиоуправляемые модели самолетов.- М: ДОСААФ, 1965 г. стр. 121, рис. 18). Это обуславливает наличие следующих недостатков: высокая точность изготовления механизмов и усложнение кинематической схемы беспилотного летательного аппарата. Кроме того, применение качалок на крыле для подсоединения тяг к элерону приводит к увеличению лобовой площади крыла, что вызывает дополнительное сопротивление и необходимость увеличения мощности двигателя.
Известен блок рулевых приводов, предназначенный для управления элероном беспилотного летательного аппарата, содержащий исполнительные механизмы, каждый из которых имеет корпус, вал рулевой поверхности (у нас - элерона), скоростной электродвигатель (у нас - скоростной электромеханический двигатель) и редуктор, включающий цилиндрическую зубчатую передачу, при этом каждый исполнительный механизм дополнительно снабжен подвижной зубчатой рейкой и находящимся в зацеплении с ней зубчатым сектором, закрепленным на валу рулевой поверхности, а редуктор дополнен шариковинтовой передачей, у которой ходовая гайка соединена с указанной рейкой, а ходовой винт закреплен на выходном валу вышеуказанной цилиндрической зубчатой передачи, причем число ступеней последней не превышает двух (Патент РФ 2370412 С1, МПК В64С 13/34 от 20.10.2009 г. «Блок рулевых приводов»).
Недостатком прототипа является большая высота исполнительных механизмов, что требует дополнительного места в фюзеляже беспилотного летательного аппарата, а также наличие разного рода двуплечих или многоплечих рычагов и качалок, что приводит к увеличению лобовой площади крыла, вызывает дополнительное сопротивление и необходимость увеличения мощности двигателя. Кроме того, требуется высокая точность изготовления механизмов для исключения люфта в подвижных соединениях.
Задачей изобретения является создание более простой и дешевой конструкции электромеханического привода для управления элеронами, позволяющей произвести его интеграцию в крыло беспилотного летательного аппарата путем снижения его массогабаритных показателей, обеспечивая при этом снижение лобового сопротивления набегающему потоку, уменьшение люфта в деталях сопряжения механизмов и экономию места в фюзеляже беспилотного летательного аппарата.
Поставленная задача достигается за счет того, что электромеханический привод для управления элероном беспилотного летательного аппарата содержит скоростной электромеханический двигатель, который состоит из корпуса, установленного на основании, двух опорных подшипников, стопорной пружинной шайбы для фиксации опорных подшипников в осевом направлении, датчика угла поворота, неподвижной части из шести сдвоенных электромагнитных систем и шести постоянных магнитов, каждая электромагнитная система включает магнитопровод и обмотку управления, залитые компаундом, упоров, расположенных на зубчатом роторе, который выполнен в виде пространственного цилиндрического кулачкового механизма барабанного типа, посредством которого сообщается качательное движение толкателю, соединенному с осью вращения элерона.
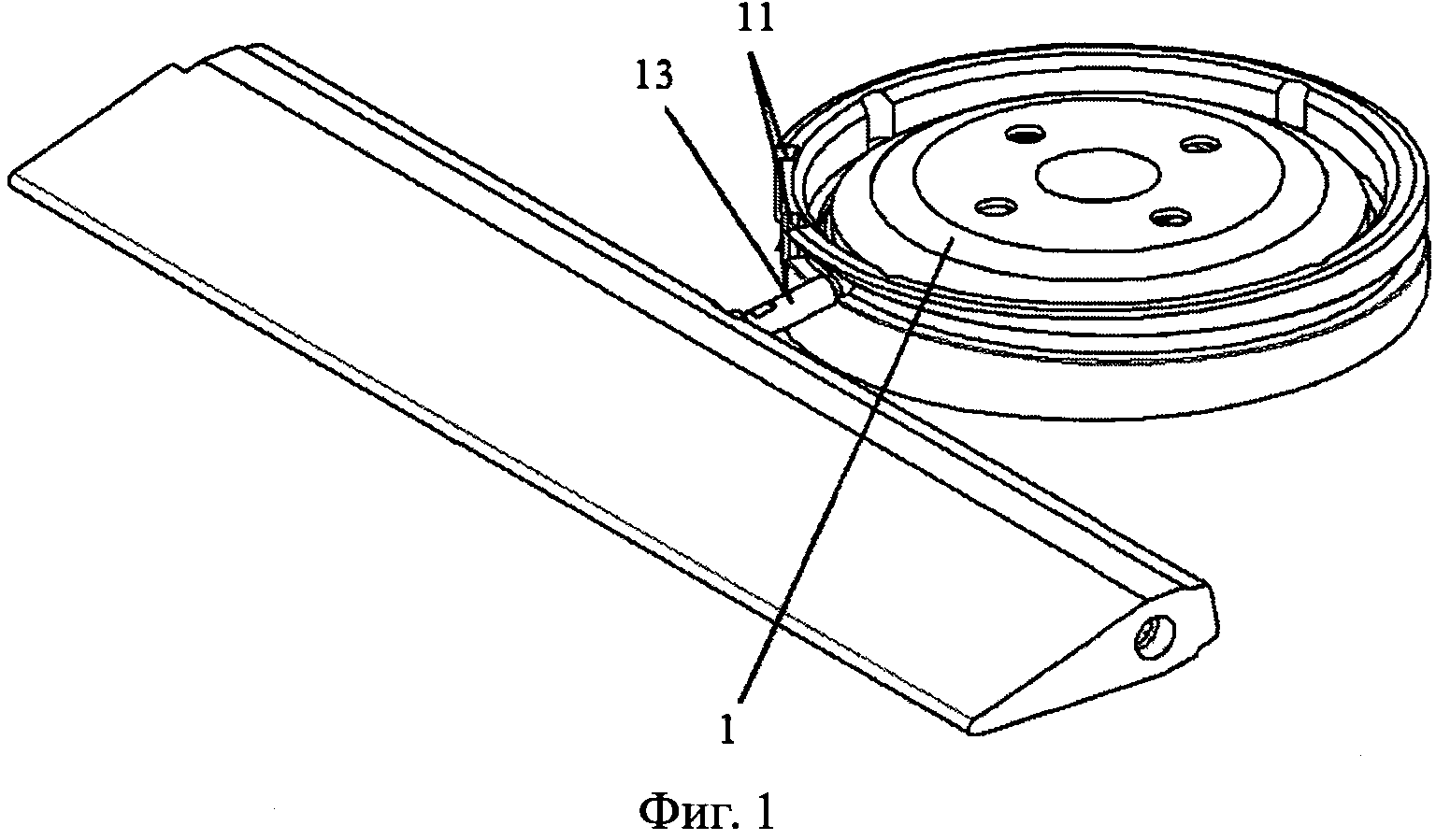
На фиг. 1 представлен общий вид электромеханического привода.
На фиг. 2 представлен электромеханический двигатель, главный вид.
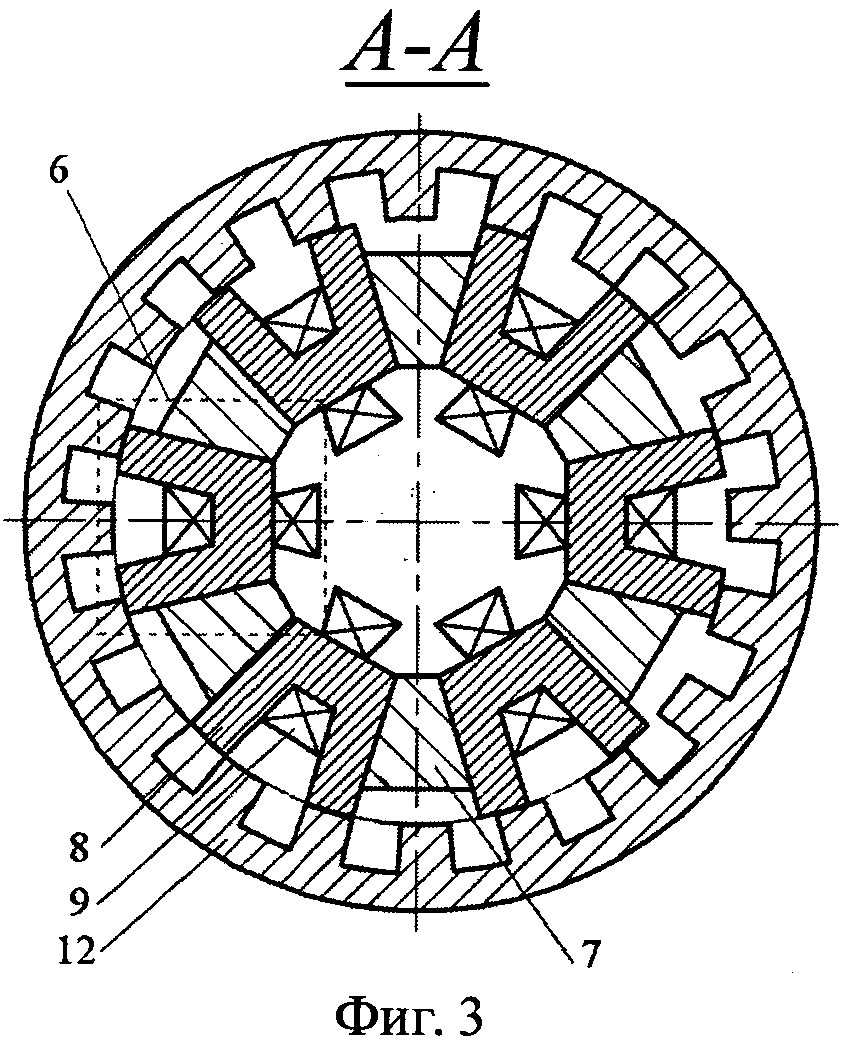
На фиг. 3 представлен электромеханический двигатель, вид А-А.
Электромеханический привод для управления элероном беспилотного летательного аппарата содержит скоростной электромеханический двигатель 1, который состоит из корпуса 2, установленного на основании 3, двух опорных подшипников 4, стопорной пружинной шайбы 5 для фиксации опорных подшипников 4 в осевом направлении, датчика угла поворота (не показан), неподвижной части из шести сдвоенных электромагнитных систем 6 и шести постоянных магнитов 7, каждая электромагнитная система 6 включает магнитопровод 8 и обмотку управления 9, залитые компаундом 10, упоров 11, выполняющих роль ограничителей крайних положений, расположенных на зубчатом роторе 12, который выполнен в виде пространственного цилиндрического кулачкового механизма барабанного типа, посредством которого сообщается качательное движение толкателю 13, соединенному с осью вращения элерона. Обмотки управления 9 противоположных электромагнитных систем 6 соединены последовательно.
Электромеханический привод для управления элеронами беспилотного летательного аппарата работает следующим образом. В исходном состоянии обмотки управления 9 обесточены. Для смещения зубчатого ротора 12 на 3° на обмотки управления 9 второй и третьей пары подается ток, при этом в обмотках управления 9 первой пары ток отсутствует. Зубчатый ротор 12 начинает вращаться, сообщая качательное движение толкателю 13, соединенному с осью вращения элерона, в результате чего элерон поворачивается. Чтобы сместить зубчатый ротор 12 еще на 3° (суммарный ход 6°), на обмотки управления третьей пары продолжает подаваться ток, на обмотки управления 9 первой пары подается ток обратной полярности, в обмотках управления 9 второй пары ток отсутствует. Для смещения зубчатого ротора 12 еще на 3° (суммарный ход 9°), на обмотки управления 9 первой пары продолжает подаваться ток, на обмотки управления 9 второй пары подается ток такой же полярности, как и в обмотках управления 9 первой пары, на обмотки управления 9 третьей пары ток не подается. Для смещения зубчатого ротора 12 еще на 3° (суммарный ход 12°) на обмотки управления 9 второй пары продолжает подаваться ток, на обмотки управления 9 третьей пары подается ток такой же полярности, как на обмотках управления 9 второй пары, на обмотки управления 9 первой пары ток не подается. Для смещения зубчатого ротора 12 еще на 3° (суммарный ход 15°) на обмотки управления 9 третьей пары продолжает подаваться ток, на обмотки управления 9 первой пары подается ток обратной полярности, чем в обмотках управления 9 третьей пары, на обмотки управления 9 второй пары ток не подается. Для смещения зубчатого ротора 12 еще на 3° (суммарный ход 18°) на обмотки управления 9 первой пары продолжает подаваться ток, на обмотки управления 9 второй пары подается ток такой же полярности, как на обмотки управления 9 первой пары, на обмотки управления 9 третьей пары ток не подается. Для дальнейшего поворота зубчатого ротора 12 необходимо подавать ток в парные обмотки управления 9 в соответствии с приведенным выше описанием. Максимальный угол поворота зубчатого ротора 12 ограничен упорами 11 и составляет 330°. Для поворота зубчатого ротора 12 на 18° необходимо выполнить шесть тактов коммутации обмоток управления 9 с дискретностью 3°. При максимальном угле поворота 330° зубчатого ротора 12 необходимо выполнить 110 тактов коммутации. Для остановки зубчатого ротора 12 прекращается подача тока. Зубчатый ротор 12 удерживается в фиксированном положении за счет электромагнитной силы, создаваемой постоянными магнитами 7, конструкция зубчатого ротора 12 в виде пространственного цилиндрического кулачкового механизма барабанного типа обеспечивает режим самоторможения элерона. Поворот элерона в обратном направлении обеспечивается сменой направления токов в обмотках управления 9.
Электромеханический привод для управления элероном беспилотного летательного аппарата, содержащий скоростной электромеханический двигатель, отличающийся тем, что скоростной электромеханический двигатель состоит из корпуса, установленного на основании, двух опорных подшипников, стопорной пружинной шайбы для фиксации опорных подшипников в осевом направлении, датчика угла поворота, неподвижной части из шести сдвоенных электромагнитных систем и шести постоянных магнитов, каждая электромагнитная система включает магнитопровод и обмотку управления, залитые компаундом, упоров, расположенных на зубчатом роторе, который выполнен в виде пространственного цилиндрического кулачкового механизма барабанного типа, посредством которого сообщается качательное движение толкателю.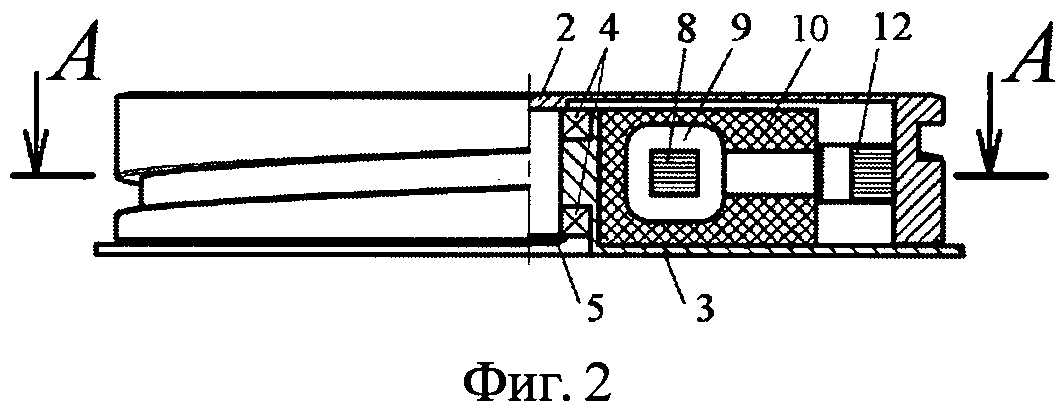
Вентиляторная установка
Устройство измерения вебер-амперных характеристик для электротехнических устройств
Подъемная установка
Вентиляторная установка
Устройство измерения вебер-амперных характеристик для электротехнических устройств
Подъемная установка

