Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ТЕЛЕКАМЕРЫ
Вид РИД
Изобретение
Изобретение относится к способам управления подвижными объектами и может быть использовано в системах управления угловым положением телекамеры и акустических средств подводных и летательных аппаратов.
Известна система управления телекамерой, обеспечивающая автоматическое наведение телекамеры, установленной на подводном аппарате с возможностью изменения пространственной ориентации ее оптической оси относительно корпуса этого подводного аппарата и точки крепления к нему многозвенного манипулятора (патент РФ 997544, МПК G05B 11/40, 2000).
Недостатком этой системы является то, что она не всегда обеспечивает качественное слежение за целью, особенно тогда, когда оптическая ось телекамеры составляет с горизонтом угол около 90°.
Известен также способ автоматического наведения телекамеры, установленной на подводном аппарате с возможностью изменения пространственной ориентации ее оптической оси относительно корпуса этого подводного аппарата и точки крепления к нему многозвенного манипулятора (патент РФ 2200971, МПК G05B 11/00, 2003).
Недостатком известного способа является то, что он не обеспечивает непрерывного автоматического наведения продольной оси телекамеры, установленной на подводном аппарате, на среднюю точку схвата перемещающегося манипулятора, также установленного на подводном аппарате.
Задачей изобретения является обеспечение автоматического наведения продольной оси телекамеры, установленной на подводном аппарате, на среднюю точку схвата манипулятора, также установленного на подводном аппарате, в процессе его работы.
Технический результат изобретения заключается в обеспечении угловых перемещений продольной оси телекамеры, установленной на подводном аппарате, в пространстве относительно продольной оси этого аппарата. При этом информация об угловых перемещениях телекамеры формируется на основе информации о положении в пространстве средней точки охвата манипулятора.
Поставленная задача решается тем, что способ автоматического наведения телекамеры, установленной на подводном аппарате с возможностью изменения пространственной ориентации ее оптической оси относительно корпуса этого подводного аппарата и точки крепления к нему многозвенного манипулятора, отличается тем, что непрерывно определяют положение средней точки схвата манипулятора, установленного на подводном аппарате, в связанной с ним системе координат, при этом на два привода, обеспечивающих угловые перемещения телекамеры по двум ее степеням подвижности, подают сигналы управления, пропорциональные угловому смещению вектора, совпадающего с оптической осью телекамеры и определяющего текущее положение средней точки схвата манипулятора относительно точки крепления телекамеры к подводному аппарату, от исходного положения оптической оси телекамеры, которые обеспечивают наведение оптической оси телекамеры на среднюю точку схвата манипулятора в процессе его работы, причем положение средней точки схвата манипулятора в пространстве определяется посредством аналитических выражений, определяющих решения обратной задачи кинематики для используемого манипулятора.
Сопоставительный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак, указывающий, что «непрерывно определяют положение средней точки схвата манипулятора, установленного на подводном аппарате, в связанной с ним системе координат» позволяет получать информацию о текущем положении в пространстве средней точки А схвата манипулятора.
Признаки «…на два привода, обеспечивающих угловые перемещения телекамеры по двум ее степеням подвижности, подают сигналы управления, пропорциональные угловому смещению вектора, совпадающего с оптической осью телекамеры и определяющего текущее положение средней точки схвата манипулятора относительно точки крепления телекамеры к подводному аппарату, от исходного положения оптической оси телекамеры, которые обеспечивают наведение оптической оси телекамеры на среднюю точку схвата манипулятора в процессе его работы…» позволяют реализовать программные сигналы управления, подаваемые на входы соответствующих следящих приводов поворотной телекамеры.
Признаки, указывающие, что «положение средней точки схвата манипулятора в пространстве определяется посредством аналитических выражений, определяющих решения обратной задачи кинематики для используемого манипулятора» позволяют сформировать программные сигналы управления, обеспечивающие перемещение телекамеры в текущее положение, тем самым обеспечивая наведение продольной оси этой телекамеры на среднюю точку А схвата манипулятора.
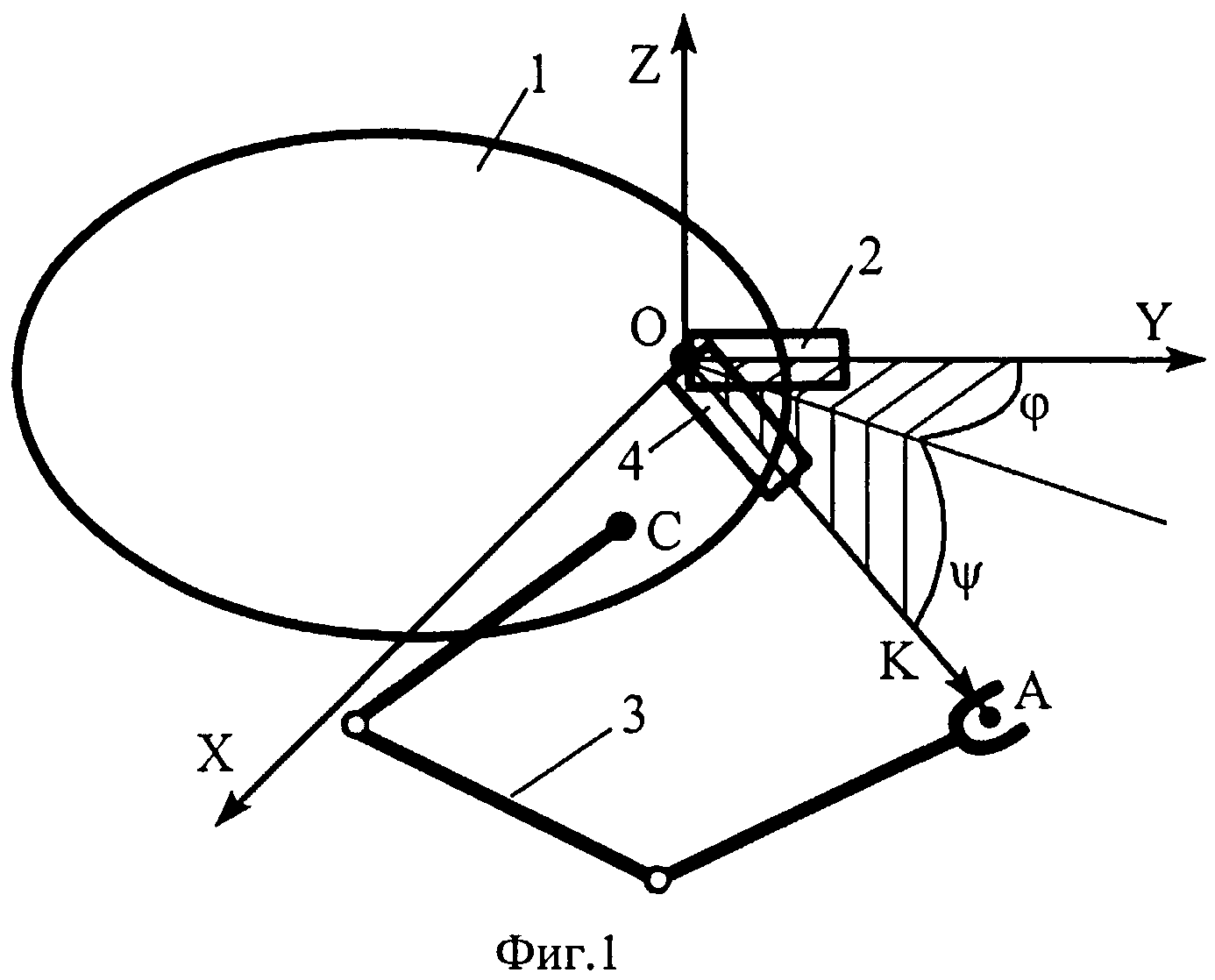
Заявленный способ осуществляют с помощью системы автоматического наведения телекамеры, которое иллюстрируется чертежами, где на фиг.1 схематически показан подводный аппарат 1, а также закрепленные на нем в точке O поворотная телекамера 2 в исходном положении, имеющая две степени подвижности, и в точке C - многозвенный манипулятор 3; а на фиг.2 дана схема одного канала управления одним из двух движителей поворотной телекамеры 2, который обеспечивает ее угловое перемещение в одном из двух ее шарниров.
Кроме того, на чертежах показаны телекамера 4, наведенная на среднюю точку A схвата манипулятора 3 во время его перемещения; блок 5 решения прямой задачи кинематики манипулятора 3; блок 6 формирования сигналов перемещения телекамеры 4 в двух ее шарнирах на углы φ и ψ; элемент 7 сравнения; корректирующее устройство 8; усилитель 9; двигатель 10 одной из двух степеней подвижности телекамеры; поворотный шарнир 11 соответствующей степени подвижности телекамеры; датчик 12 поворота в рассматриваемой степени подвижности телекамеры; линия 13 отрицательной обратной связи; X, Y и Z - оси связанной с подводным аппаратом 1 правой прямоугольной системы координат (СК) XYZ, начало которой совпадает с точкой O, а ось Y - с продольной осью этого подводного аппарата; K=[x, y, z]∈R3 - вектор, определяющий положение средней точки A схвата манипулятора 3 в СК XYZ; φ - угол между осью Y и проекцией вектора K, совпадающего с продольной осью телекамеры 4, на плоскость YZ; ψ - угол между вектором K и его проекцией на плоскость XY; εφ - текущая ошибка управления приводом поворотной телекамеры, управляющим углом φ; q1-qn - обобщенные координаты манипулятора; n - число степеней подвижности манипулятора.
Следует отметить, что при работе с подводным манипулятором 3 требуется отслеживать перемещения его схвата с помощью телекамеры 4. Отслеживание в ручном режиме неудобно, снижает скорость выполнения работ, оказывает дополнительную нагрузку на оператора и проводит к его большей утомляемости.
В результате возникает необходимость автоматического перемещения телекамеры 4 при работе манипулятора 3, которое должно обеспечивать постоянную ориентацию ее продольной оси на среднюю точку A схвата манипулятора 3. Это перемещение осуществляется на основе информации о текущем положении в пространстве средней точки A схвата манипулятора 3.
Заявленный способ реализуют следующим образом. От всех степеней подвижности работающего манипулятора 3 на блок 5 поступают сигналы q1-qn, и он начинает формировать сигналы x, y и z, с помощью которых блок 6 начинает формировать программные сигналы управления φ и ψ, поступающие на входы соответствующих следящих приводов поворотной телекамеры 4. На выходах элементов 7 сравнения этих следящих приводов формируются соответствующие ошибки εφ и εψ слежения, которые после коррекции в блоках 8, усиливаясь усилителями 9, поступают на входы двигателей 10, обеспечивая перемещения в соответствующих шарнирах 11 поворотной телекамеры 4, которые измеряются датчиками 12 и обеспечивают перемещение телекамеры 4 в текущее положение, тем самым обеспечивая наведение продольной оси этой телекамеры на среднюю точку А охвата манипулятора 3.
Очевидно, что реализация предложенного способа автоматического наведения телекамеры на среднюю точку A охвата подводного манипулятора 3 не вызывает принципиальных затруднений, поскольку блоки 5 и 6 реализуются на типовых контроллерах, использующих типовые вычислительные алгоритмы, реализуемые в реальном масштабе времени, а элементы 7-10 и 12 являются также типовыми.
Способ автоматического наведения телекамеры, установленной на подводном аппарате с возможностью изменения пространственной ориентации ее оптической оси относительно корпуса этого подводного аппарата и точки крепления к нему многозвенного манипулятора, отличающийся тем, что непрерывно определяют положение средней точки схвата манипулятора, установленного на подводном аппарате, в связанной с ним системе координат, при этом на два привода, обеспечивающих угловые перемещения телекамеры по двум ее степеням подвижности, подают сигналы управления, пропорциональные угловому смещению вектора, совпадающего с оптической осью телекамеры и определяющего текущее положение средней точки схвата манипулятора относительно точки крепления телекамеры к подводному аппарату, от исходного положения оптической оси телекамеры, которые обеспечивают наведение оптической оси телекамеры на среднюю точку схвата манипулятора в процессе его работы, причем положение средней точки схвата манипулятора в пространстве определяется посредством аналитических выражений, определяющих решения обратной задачи кинематики для используемого манипулятора.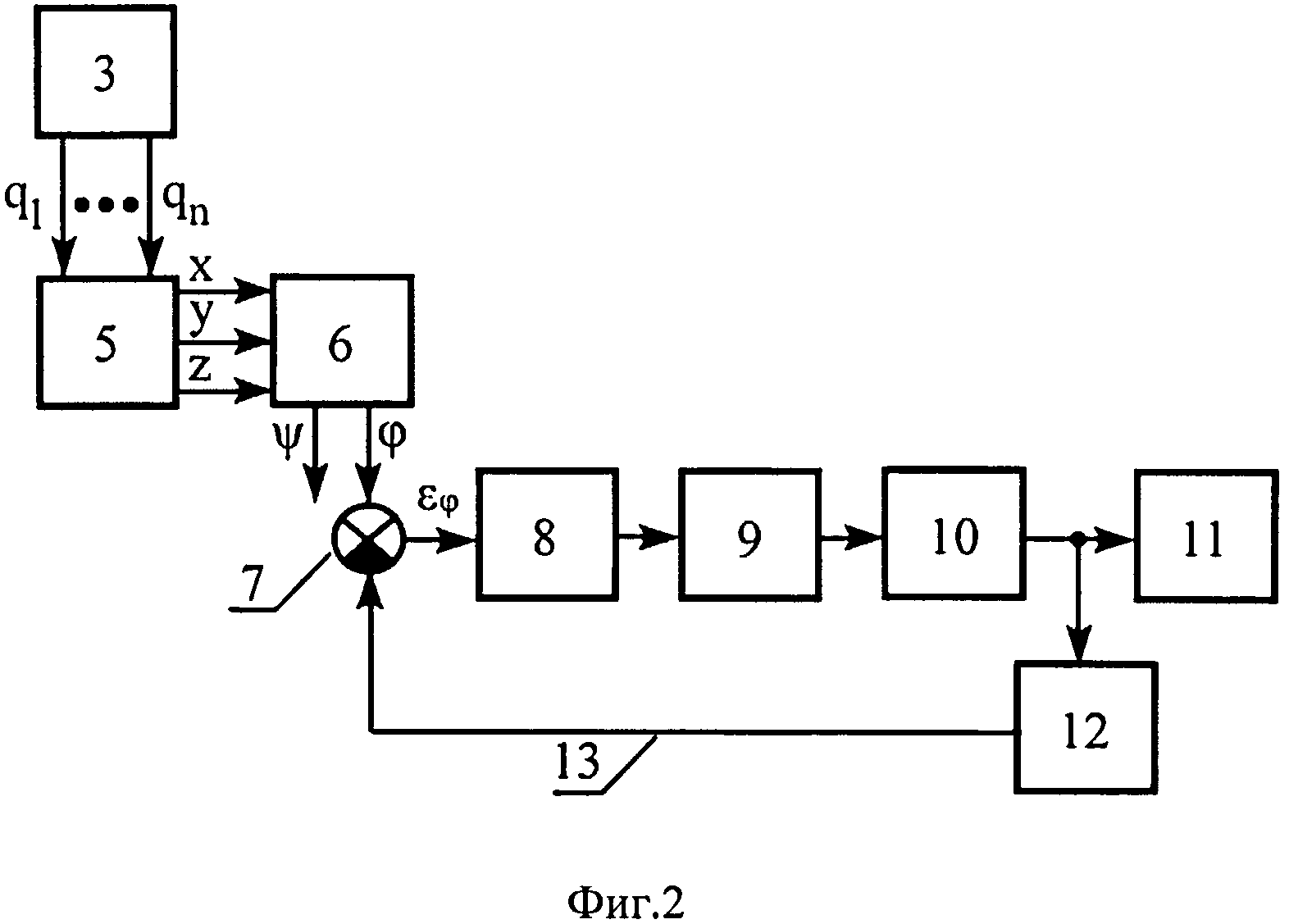
Ротор электромашины
Водогрейный котел
Ротор электромашины
Носовая оконечность корпуса судна
Способ струйной обработки материалов
Способ изготовления изделий из лигноцеллюлозных полимерных композиционных материалов
Водогрейный котел
Водогрейный котел
Винт
Носовая оконечность корпуса судна
Топка водогрейного котла
Судовое рулевое устройство
Полуфабрикат мясорастительный рубленый
Состав для производства шоколада
Сухая смесь для приготовления напитка
Соевый соус
Сухая смесь для приготовления спортивного напитка
Электромашина
Радиальный магнитный подшипниковый узел
Способ получения антифрикционной композиции

