Результат интеллектуальной деятельности: СПОСОБ МНОГОАЛЬТЕРНАТИВНОЙ ОПТИМИЗАЦИИ МОДЕЛЕЙ АВТОМАТИЗАЦИИ СТРУКТУРНОГО СИНТЕЗА ДЛЯ СОЗДАНИЯ МЕХАТРОННО-МОДУЛЬНЫХ РОБОТОВ
Вид РИД
Изобретение
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано при создании мехатронно-модульных роботов.
Одним из важнейших и перспективных направлений развития современной робототехники связано с разработкой нового класса устройств - многозвенных мехатронно-модульных роботов с адаптивной структурой. Структурный синтез при проектировании реконфигурируемых мехатронно-модульных роботов рассматривается как одновременное, автоматизированное решение двух задач выбора: порядка блочно-модульной сборки и варианта настройки априорно периодического закона изменения обобщенных координат (y, z), определяющего алгоритм управления движением.
Известен способ многоальтернативной оптимизации моделей автоматизации структурного синтеза мехатронно-модульных роботов, заключающийся в проведении синтеза структуры многоинвариантной модели мехатронно-модульных роботов и последующей фиксации полученных оптимальных решений (И.М.Макаров, В.М.Лохин, С.В.Манько, М.П.Романов, М.В.Кадочников. ИТ, "Технологии обработки знаний в задачах управления автономными мехатронно-модульными реконфигурируемыми роботами" приложение к "Информационные технологии" №8, М., "Новые технологии", 2010, стр.3-7, рис.14 - прототип).
Указанный способ многоальтернативной оптимизации моделей автоматизации структурного синтеза мехатронно-модульных роботов заключается в создании конкретных модулей и запоминании конкретных положений отдельных модулей для решения целевых задач.
Недостатками данного способа являются его значительная сложность, низкая эффективность ориентации в окружающей среде реконфигурируемых мехатронных устройств, преимущественно мехатронно-модульных роботов.
Задачей предложенного технического решения является устранение указанных недостатков и создание способа многоальтернативной оптимизации моделей автоматизации структурного синтеза мехатронно-модульных роботов для его создания, применение которых позволит ускорить процесс синтеза, а также повысит эффективность ориентации в окружающей среде и надежность работы создаваемых мехатронных устройств, преимущественно мехатронно-модульных роботов.
Решение поставленной задачи достигается тем, что предложен способ создания мехатронно-модульного робота, при использовании которого, согласно изобретению, при проведении синтеза структуры многоинвариантной модели мехатронно-модульных роботов и последующем фиксировании полученных оптимальных решений рассматривают множество проектных элементов и вводят соответствующие альтернативные переменные путем представления дискретных чисел, соответствующих этим элементам, в двоичном исчислении, после чего обозначают количество модулей, объединяемых в один робот, преимущественно без четко выраженной структуры, и обеспечивают сопряжение каждого нового модуля с ранее собранными вдоль выбранного направления и стыковку его первой интерфейсной площадки с одной из свободных на любых других элементах конструкции, занимающих ближайшее крайнее положение в том или ином ряду, причем интерфейсные площадки каждого модуля выполняют с возможностью стыковки с аналогичными площадками, по крайней мере, в четырех диаметрально противоположных направлениях, при этом один из двух сопрягаемых между собой модулей, преимущественно первичный, выполняют управляющим по отношению к другому/им, вторичному/ым, с ним стыкуемому/им, причем указанную иерархию в структуре мехатронно-модульного робота соблюдают при последующем сопряжении модулей до формирования окончательной структуры мехатронно-модульного робота, при этом количество модулей, объединяемых в упомянутый робот, определяют из соотношения: n=1, N, где: n - количество модулей, объединяемых в один робот, определяют из соотношения n=1+x1+2x2+4x3+8x4, где: x1, x4=1, 0 - количество интерфейсных площадок на модуле, N≤16 - предельное количество модулей, которые могут быть объединены в один робот, после чего вводят альтернативные переменные для описания параметров периодического закона движения следующим образом:
Angle=A+Вsin(ωt+φ),
где: A - значение обобщенной координаты, относительно которой происходит периодическое движение; B - амплитуда периодического колебания обобщенной координаты; причем суммарная величина |A|+|B| не превышает максимально допустимого отклонения обобщенной координаты модуля; φ - смещение фазы периодического движения; при этом настройкой параметров этого закона определяют алгоритмы управления синтезируемой мехатронно-модульной конструкции, причем для оптимизационного структурного синтеза выбирают значения альтернативных переменных  , обеспечивающих максимальное значение функции:
, обеспечивающих максимальное значение функции:

при ограничениях n=1, N
 ,
,

где ymax, zmax - максимально допустимые отклонения обобщенной координаты модуля относительно ее нулевого значения, причем для нахождения максимального значения функции f используют рандомизированной алгоритм многоальтернативной оптимизации, который дополняют еще одним уровнем в рамках управляемого роя частиц.
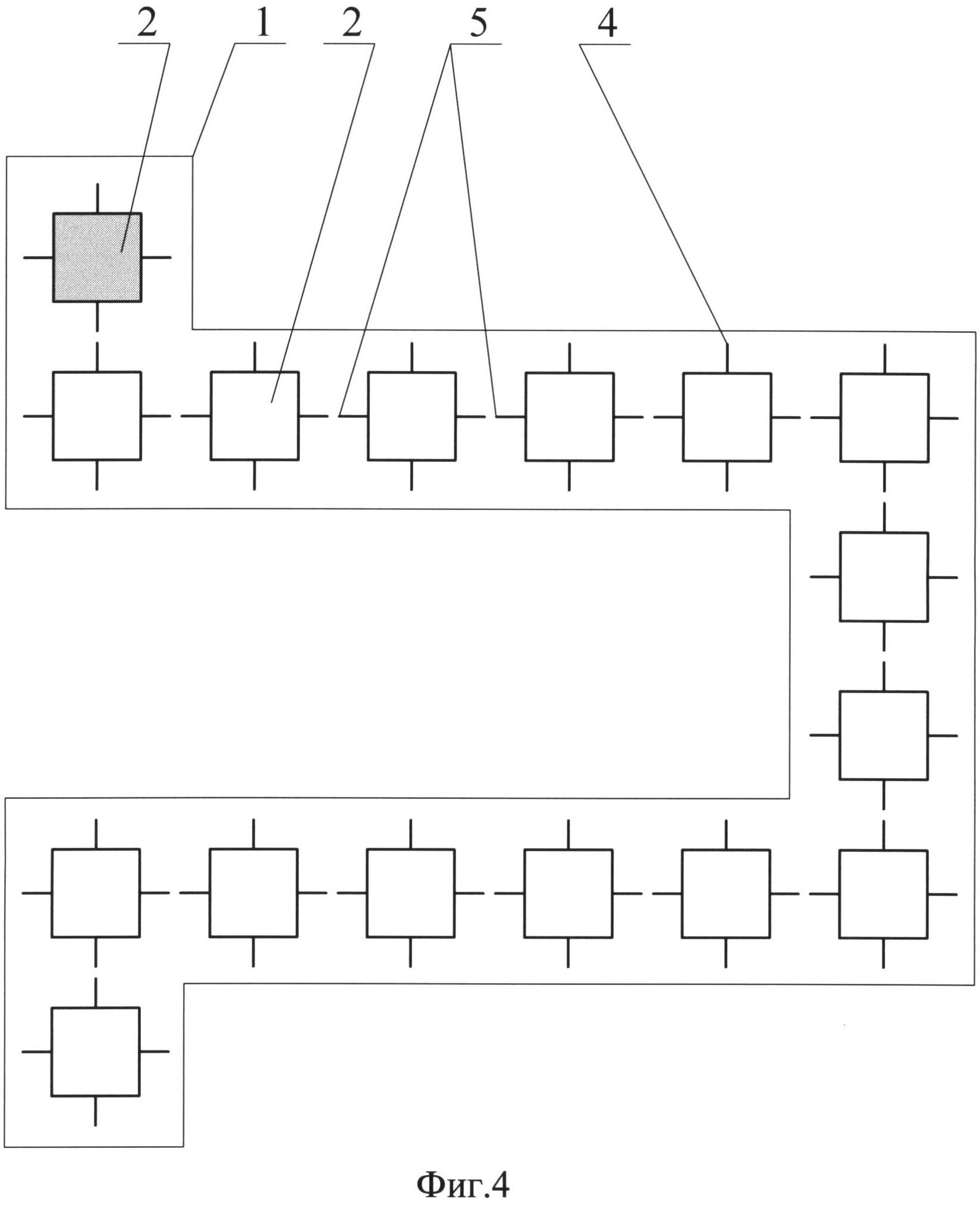
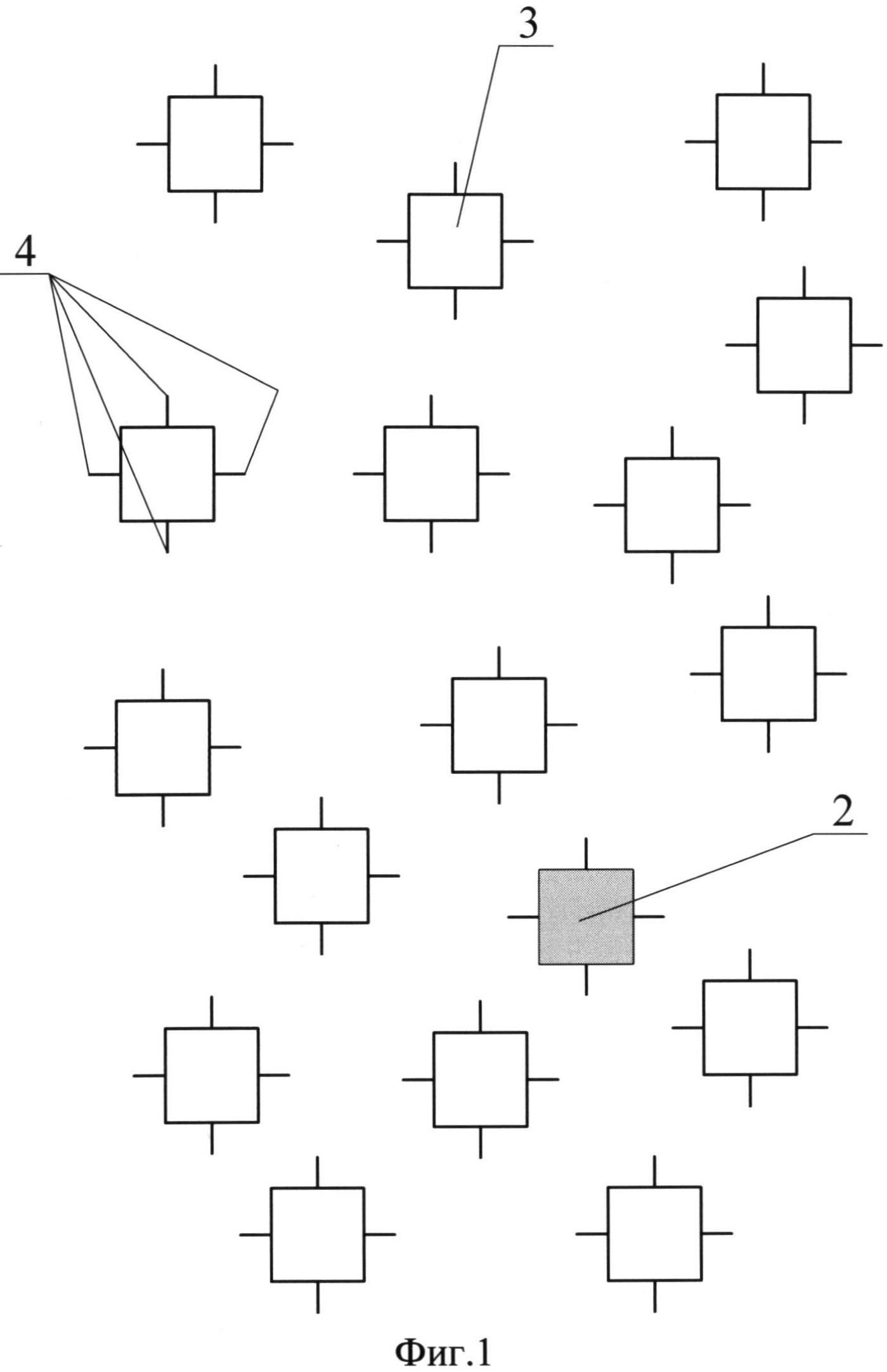
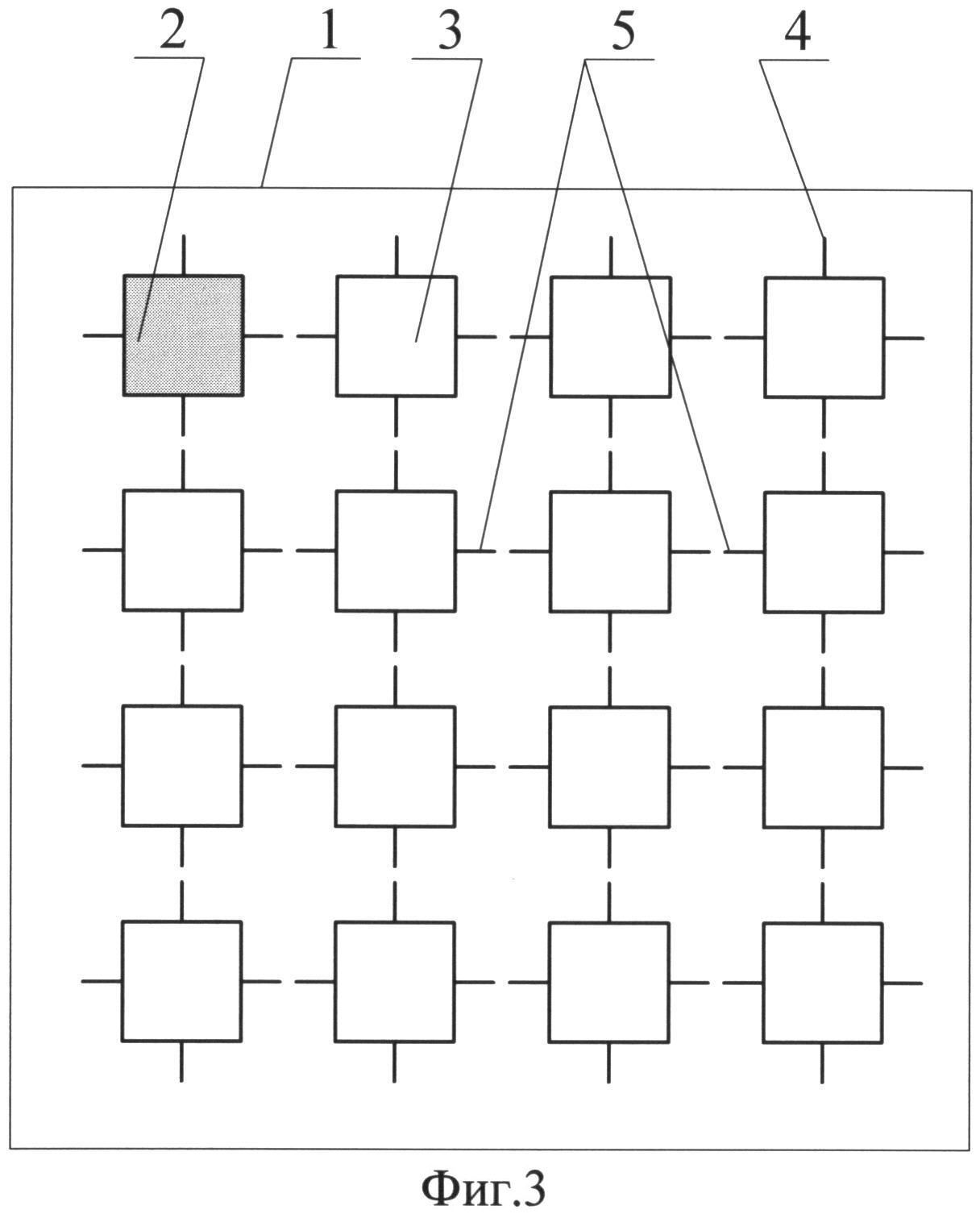
Сущность изобретения иллюстрируется чертежами, где на фиг.1 показаны отдельные мехатронно-модульные роботы со свободными интерфейсными площадками, на фиг.2 - мехатронно-модульный робот, состоящий из нескольких модулей, соединенных между собой по свободным интерфейсным площадкам и образующий фигуру в виде многоугольника, на фиг.3 - мехатронно-модульный робот, состоящий из нескольких модулей, соединенных между собой по свободным интерфейсным площадкам и образующий фигуру в виде квадрата, на фиг.4 - мехатронно-модульный робот, состоящий из нескольких модулей, соединенных между собой по свободным интерфейсным площадкам и образующий фигуру в виде прямоугольника.
Предложенный способ может быть реализован при помощи мехатронно-модульного робота, имеющего следующую конструкцию.
Мехатронно-модульный робот 1 состоит, как минимум, из двух сопряженных между собой модулей первичного 2 и вторичного 3. Один из двух сопрягаемых между собой модулей, преимущественно первичный 2, является управляющим по отношению к другому, вторичному 3, с ним стыкуемым, причем указанная иерархия в структуре мехатронно-модульного робота соблюдается при последующем сопряжении модулей до формирования окончательной структуры мехатронно-модульного робота. Сопряжение каждого нового модуля с ранее собранным/и осуществлено вдоль выбранного направления и обеспечено стыковкой его первой свободной интерфейсной площадки 4 с одной из свободных аналогичных площадок 4 на любых других элементах конструкции, занимающих ближайшее крайнее положение в том или ином ряду. Несвободная интерфейсная площадка 5 образована за счет стыковки между собой двух свободных интерфейсных площадок 4.
Предложенный мехатронно-модульный робот функционирует следующим образом.
Произвольно выбирается управляющий первичный модуль 2 со свободной интерфейсной площадкой 4 и стыкуется с любым произвольно выбранным вторичным модулем 3 с аналогичной свободной интерфейсной площадкой 4. При стыковке между собой двух свободных интерфейсных площадок 4 образуется несвободная интерфейсная площадка 5. Дальнейшее присоединение свободных модулей 3 к образованному модулю, состоящему из двух первоначально соединенных между собой управляющего модуля 2 и вторичного 3, происходит вдоль выбранного направления с образованием требуемой конечной структуры мехатронно-модульного робота.
Предложенный способ по созданию мехатронно-модульного робота может быть реализован следующим образом.
Рассматривают множество проектных элементов и вводят соответствующие альтернативные переменные путем представления дискретных чисел, соответствующих этим элементам, в двоичном исчислении.
Обозначают количество модулей 2 и 3, объединяемых в один мехатронно-модульный робот 1, без четко выраженной структуры,  Тогда в двоичном исчислении получают при N≤16, где: N - количество сторон, n - количество возможный итераций,
Тогда в двоичном исчислении получают при N≤16, где: N - количество сторон, n - количество возможный итераций,
n=1+x1+2x2+4х3+8x4,
где 
При блочно-модульной сборке робота 1 полагают, что сопряжение каждого нового модуля с ранее собранными осуществляется вдоль выбранного направления и обеспечивается стыковкой его первой свободной интерфейсной площадки 4 с одной из свободных аналогичных интерфейсных площадок 4 на любых других модулях 3, как элементах конструкции, занимающих ближайшее крайнее положение в том или ином ряду.
Выделяют этот алгоритм преимущественно как Асб. Описание порядка сборки приводят к указанию направления и места крепления очередного элемента с использованием алгоритма Асб.
В направлении для стыковки n-го модуля nст принимают четыре значения: nст=1 - север, nст=2 - восток, nст=3 - юг, nст=4 - запад и представляют через альтернативные переменные:
nст.n=1+x5n+2x6n,
где  ,
, 
Номер площадки, выбираемой для стыковки n-го модуля в двоичном исчислении, записывают в следующем виде:
nст.n=1+x7n+2х8n+4x9n,
где  ,
, 
Альтернативные переменные для описания параметров
периодического закона вводят следующим образом:
Angle=A+Bsin(ωt+φ),
где A - значение обобщенной координаты, относительно которой происходит периодическое движение;
B - амплитуда периодического колебания обобщенной координаты; суммарная величина |A|+|B| не должна превышать максимально допустимого отклонения обобщенной координаты модуля;
φ - смещение фазы периодического движения.
Настройкой параметров этого закона определяют алгоритмы управления, синтезируемой мехатронно-модульной конструкции. Указанные параметры характеризуются дискретными значениями, имеющими соответствующие численные номера в пределах N≤16.
Затем для оптимизационного структурного синтеза выбирают значения альтернативных переменных
, обеспечивающих максимальное значение функции.
при ограничениях n=1, N
,
где ymax, zmax - максимально допустимые отклонения обобщенной координаты модуля относительно ее нулевого значения.
Для нахождения максимального значения функции f используют рандомизированной алгоритм многоальтернативной оптимизации, который дополняют еще одним уровнем в рамках управляемого роя частиц.
Для синхронизации процедуры метода роя частиц и вариационной процедуры многоальтернативной оптимизации на каждом шаге управляют выбором частицы для обновления скорости изменения координат, которую осуществляют с использованием рандомизированной схемы. С этой целью вводят случайную дискретную величину m, которая принимает значение m=1, М с вероятностью pn. На первом шаге получают:
Далее изменение значений  при условии
при условии  осуществляют следующим образом. Определяют значение случайной величины
осуществляют следующим образом. Определяют значение случайной величины  . Пусть
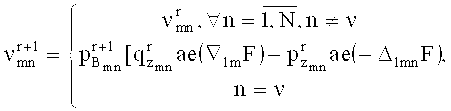
. Пусть  . Тогда скорости изменения координат на (k+1)-м шаге вычисляются:
. Тогда скорости изменения координат на (k+1)-м шаге вычисляются:
а значение вероятностей pn:
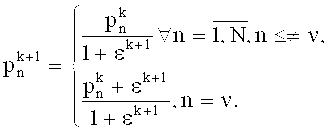
При этом величина ε>0 определяет степень рекордности движения ν-й частицы в направлении к экстремуму оптимизируемой функции.
Использование предложенного технического решения позволит проводить синтез структуры многоинвариантной модели мехатронно-модульных роботов с последующим фиксированием полученных оптимальных решений с последующем повышением количества возможных итераций мехатронно-модульного робота при значительном сокращении времени синтеза.
Способ многоальтернативной оптимизации моделей автоматизации структурного синтеза для создания мехатронно-модульных роботов, характеризующийся тем, что при проведении синтеза структуры многоинвариантной модели мехатронно-модульных роботов и последующем фиксировании полученных оптимальных решений рассматривают множество проектных элементов и вводят соответствующие альтернативные переменные путем представления дискретных чисел, соответствующих этим элементам, в двоичном исчислении, после чего обозначают количество модулей, объединяемых в один робот, преимущественно без четко выраженной структуры, и обеспечивают сопряжение каждого нового модуля с ранее собранными вдоль выбранного направления и стыковку его первой интерфейсной площадки с одной из свободных на любых других элементах конструкции, занимающих ближайшее крайнее положение в том или ином ряду, причем интерфейсные площадки каждого модуля выполняют с возможностью стыковки с аналогичными площадками, по крайней мере, в четырех диаметрально противоположных направлениях, при этом один из двух сопрягаемых между собой модулей, преимущественно первичный, выполняют управляющим по отношению к другому/им, вторичному/ым, с ним стыкуемому/им, причем указанную иерархию в структуре мехатронно-модульного робота соблюдают при последующем сопряжении модулей до формирования окончательной структуры мехатронно-модульного робота, при этом количество модулей, объединяемых в упомянутый робот, определяют из соотношения: n=1, N, где: n - количество модулей, объединяемых в один робот, определяют из соотношения n=1+x+2x+4x+8x, где: x, x=1, 0 - количество интерфейсных площадок на модуле, N≤16 - предельное количество модулей, которые могут быть объединены в один робот.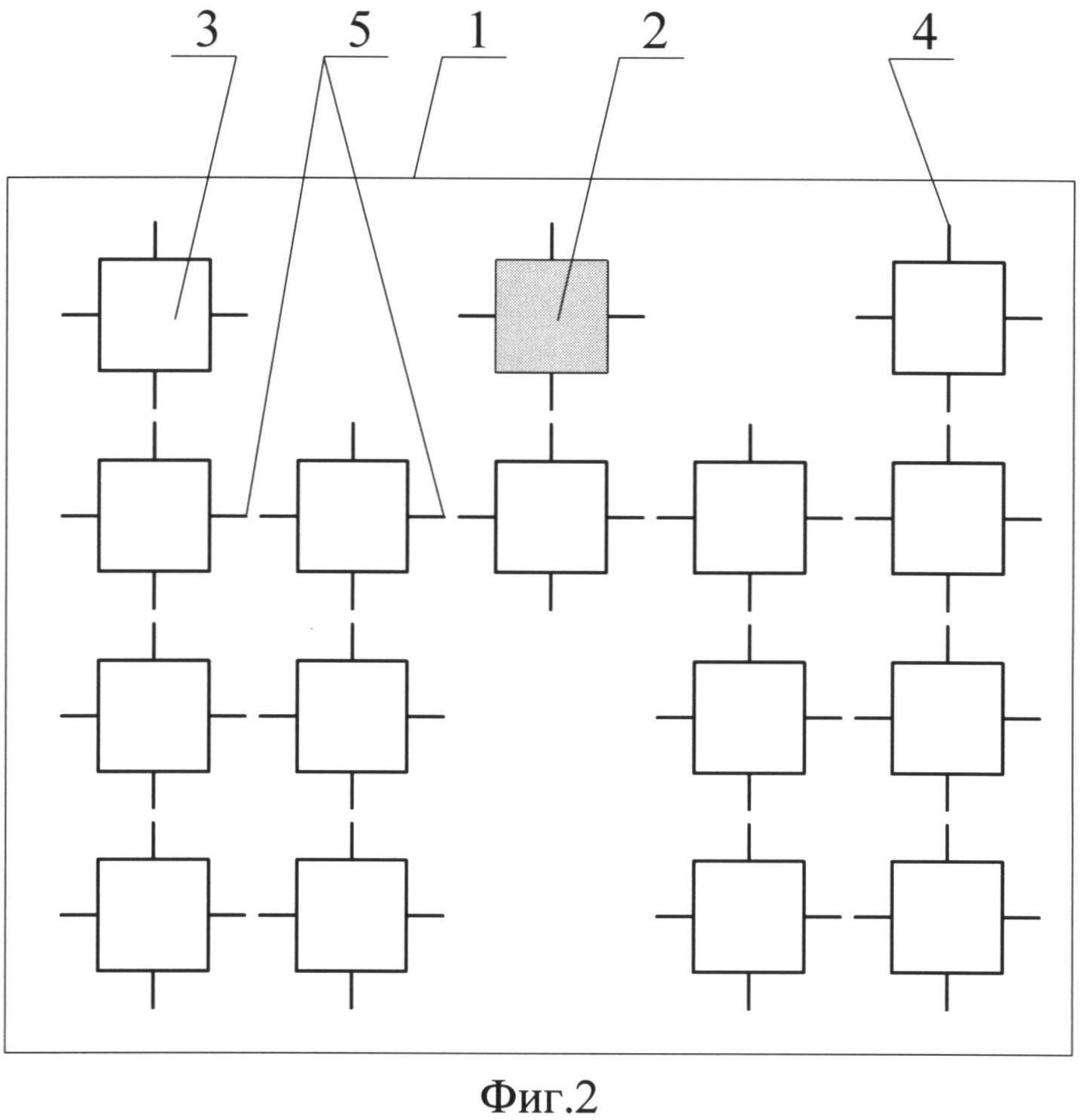
Смесительная головка камеры жрд
Смесительная головка камеры жрд
Камера жидкостного ракетного двигателя
Жидкостный ракетный двигатель
Жидкостный ракетный двигатель
Жидкостный ракетный двигатель
Способ многоальтернативной оптимизации моделей автоматизации структурного синтеза мехатронно-модульных роботов
Способ повышения живучести батиплана
Жидкостный ракетный двигатель
Устройство горелочное для сжигания промышленных стоков
Способ подачи компонентов топлива в камеру трехкомпонентного жидкостного ракетного двигателя
Жидкостный ракетный двигатель
Смесительная головка камеры жрд
Способ подачи компонентов топлива в камеру трехкомпонентного жидкостного ракетного двигателя
Соосно-струйная форсунка
Жидкостный ракетный двигатель
Соосно-струйная форсунка
Камера жидкостного ракетного двигателя
Камера жидкостного ракетного двигателя
Смесительная головка камеры жрд

