Результат интеллектуальной деятельности: СПОСОБ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к оптико-электронному приборостроению, в частности к устройствам измерения угловых координат и дальности до объектов при непрерывном сканировании окружающего пространства с возможностью измерения дальности до выбранных объектов лазерным дальномером, и может быть использовано при создании сканирующих устройств непрерывного обзора как стационарных, например, для обзора акватории морского порта, так и передвижных - для охраны границ. Возможная реализация предлагаемого способа представлена в устройстве оптической локации, приведенном в настоящем изобретении.
При круговом или секторном сканировании окружающего пространства проблемным является измерение дальности до объектов лазерными дальномерами, имеющими очень малое поле зрения - единицы угловых минут, в то время как поле зрения устройств технического зрения, например, теле- или тепловизионных камер, составляет единицы или даже десятки градусов. Эта проблема усугубляется при непрерывном сканировании окружающего пространства с угловой скоростью в сотни градусов в секунду и более. При этом объект, имеющий малые угловые размеры, пролетает поле зрения лазерного дальномера за десятые доли миллисекунды.
Известны оптико-локационные системы и системы кругового обзора [В.Я. Ширнин и др., Широкопольная инфракрасная система кругового обзора, патент РФ №2189049 от 03.10.2001 г.; А.Я. Прилипко, Н.И. Павлов, Теплопеленгатор, патент РФ №2458356 от 15.04.2011 г.; А.Я. Прилипко и др., Многофункциональная оптико-локационная система, патент РФ №2292566 от 15.09.2005 г.; В.Г. Архипов, Ю.В. Чжан, Оптический локатор кругового обзора, патент РФ №2352957 от 22.01.2007 г.], в которых применены оптико-электронные модули технического зрения. Основным недостатком этих систем является невозможность получения панорамной картины окружающего пространства и измерения дальности лазерным дальномером в процессе непрерывного сканирования окружающего пространства.
В известном способе и устройстве кругового обзора [Ф.М. Броун и др., Способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления, патент РФ №2445644 от 19.04.2010 г] формирование массива видеокадров осуществляют при непрерывном горизонтальном сканировании окружающего пространства оптико-электронным модулем с матричным фотоприемным устройством (МФПУ), а фиксацию оптического изображения на МФПУ обеспечивают вращающимся оптическим компенсатором.
В известном теплопеленгаторе [А.Я. Прилипко, Н.И. Павлов, Теплопеленгатор, патент РФ №2458356 от 15.04.2011 г.] смещение оптического изображения на МФПУ при сканировании компенсируют вращающимися оптическими клиньями.
Недостаток указанных устройств состоит в невозможности измерения лазерным дальномером расстояния до объектов, попадающих в процессе сканирования в поле зрения оптической системы, из-за его малого поля зрения, составляющего единицы угловых минут, и большой скорости сканирования.
Частично этот недостаток преодолен в оптико-пеленгационной системе кругового обзора [В.В. Тарасов и др., Оптико-пеленгационная система кругового обзора, патент РФ №2356063 от 27.11.2007 г.]. Указанная система содержит оптико-электронный блок электронного сканирования пространства, имеющий несколько оптико-электронных каналов электронного сканирования (ОЭКЭС), объективы которых равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей, в фокальной плоскости каждого объектива расположена фоточувствительная поверхность МФПУ. Поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков, что позволяет получить соответствующий массив видеокадров.
Система дополнительно включает оптико-электронный канал механического сканирования пространства, оптическая ось объектива которого проходит перпендикулярно азимутальной плоскости через центр окружности, на которой расположены объективы оптико-электронных каналов электронного сканирования. Оптико-электронный канал механического сканирования включает поворотное зеркало, расположенное на оптической оси его объектива под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места.
Система также содержит светодальномерный канал, управляемый в соответствии с наблюдением за объектом в поле обзора оптико-электронного канала механического сканирования.
Недостатки указанной системы состоят: во-первых, в большом количестве ОЭКЭС, необходимых для обзора, уменьшение числа которых автоматически ведет к увеличению их полей зрения, а следовательно, к уменьшению масштаба видеоизображений, и, как результат, к уменьшению дальности обнаружения и распознавания объектов, вплоть до их пропуска; во-вторых, в потере времени, необходимого для наведения на объект по двум осям светодальномерного канала, в-третьих, в наличии двухосного карданного подвеса, на котором установлены оптико-электронный канал и лазерный дальномер, что вносит свои погрешности в измерения.
Техническим результатом предлагаемого изобретения является возможность измерения трех координат объекта: горизонтального и вертикального углов и дальности до объекта при непрерывном сканировании с большими угловыми скоростями окружающего пространства, в том числе и кругового, при этом дальность измеряется лазерным дальномером, а также повышение точности измерений координат.
Этот результат достигается тем, что, во-первых, окружающее пространство сканируют оптико-электронным модулем вокруг одной вертикальной оси, известными средствами непрерывно получают массив видеокадров сканируемого пространства, который запоминают в видеопамяти, выбирают видеокадр и объект в нем, измеряют горизонтальную и вертикальную координаты объекта в координатной системе выбранного видеокадра, устанавливают визирную ось лазерного дальномера по измеренным горизонтальной и вертикальной координатам объекта, и при следующем цикле сканирования проводят замер дальности до объекта в момент начала формирования кадра с выбранным объектом, который совпадает с моментом прохождения визирной оси лазерного дальномера через объект; во-вторых, оптико-электронный модуль и лазерный дальномер жестко закреплены на одной платформе, что существенно снижает вероятность разъюстировки их визирных осей; в-третьих, существенным преимуществом оптических клиньев является наличие «оптической редукции» между углом поворота клина и углом отклонения визирной оси лазерного дальномера [М.М. Мирошников, Теоретические основы оптико-электронных приборов, Ленинград, Машиностроение, Ленинградское отделение, 1983, §6.2, стр.106], что повышает точность выставки визирной оси лазерного дальномера по измеренным координатам объекта.
Аппаратно указанная последовательность операций обеспечивается жесткой установкой оптико-электронного модуля и модуля лазерного дальномера на сканирующую платформу, вращающуюся вокруг вертикальной оси. Сканирующая платформа снабжена приводом и датчиком углового положения. Перед лазерным дальномером размещен блок с оптическими клиньями, каждый из которых снабжен приводом и датчиком угла. Управление всем устройством осуществляет вычислительный блок, к видеовыходу которого подключен монитор, а к информационному входу/выходу через шину последовательного обмена подключены входы/выходы всех приводов, датчиков углов, блока видеопамяти и устройства выбора объекта.
Видеокадры окружающего пространства отображаются на экране монитора вычислительного блока. Выбор объекта осуществляет оператор с помощью устройства выбора объекта, например, компьютерной «мыши», наведением на него курсора, при этом вычислительный блок определяет вертикальные и горизонтальные координаты выбранного объекта относительно центра видеокадра.
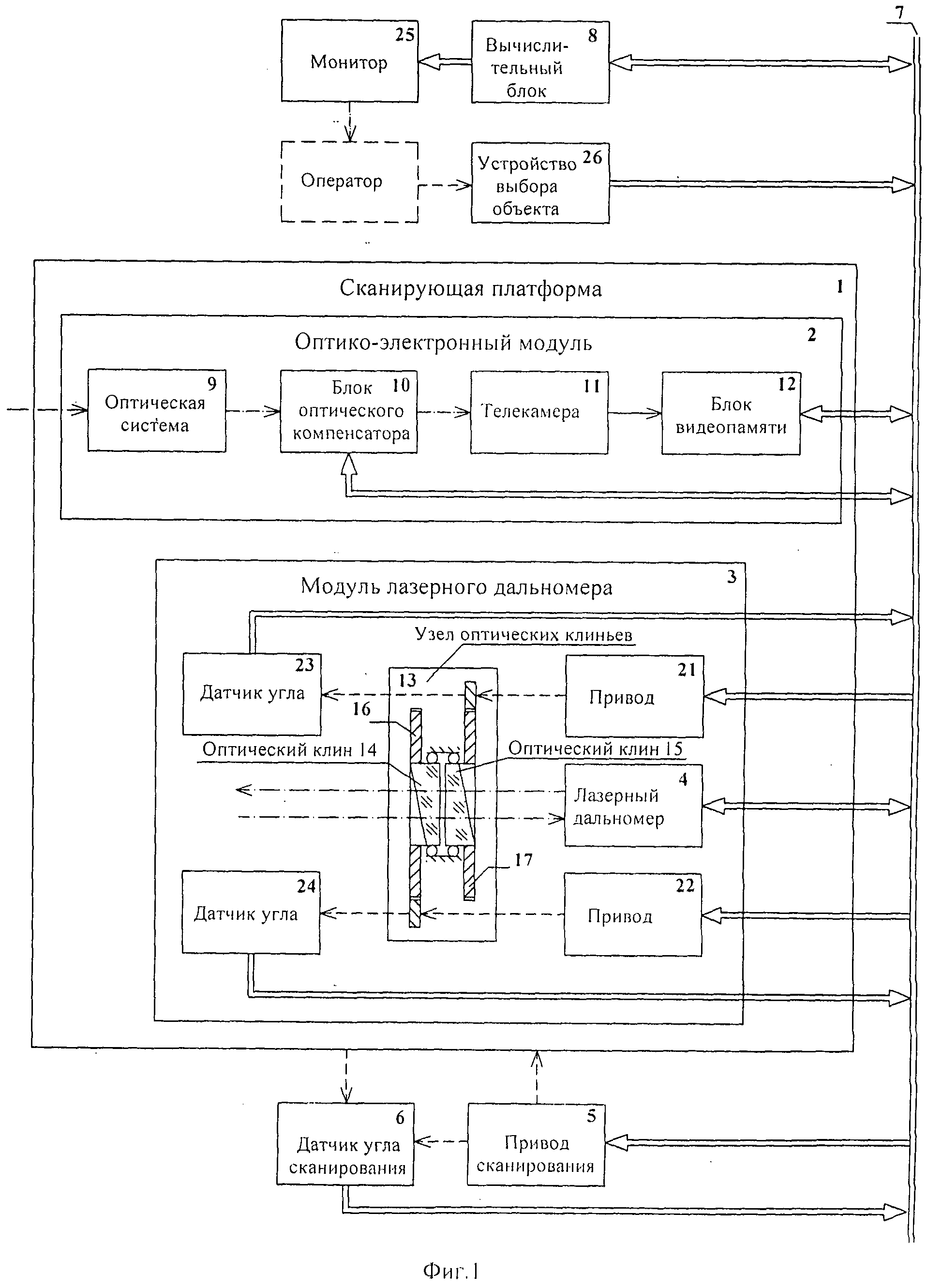
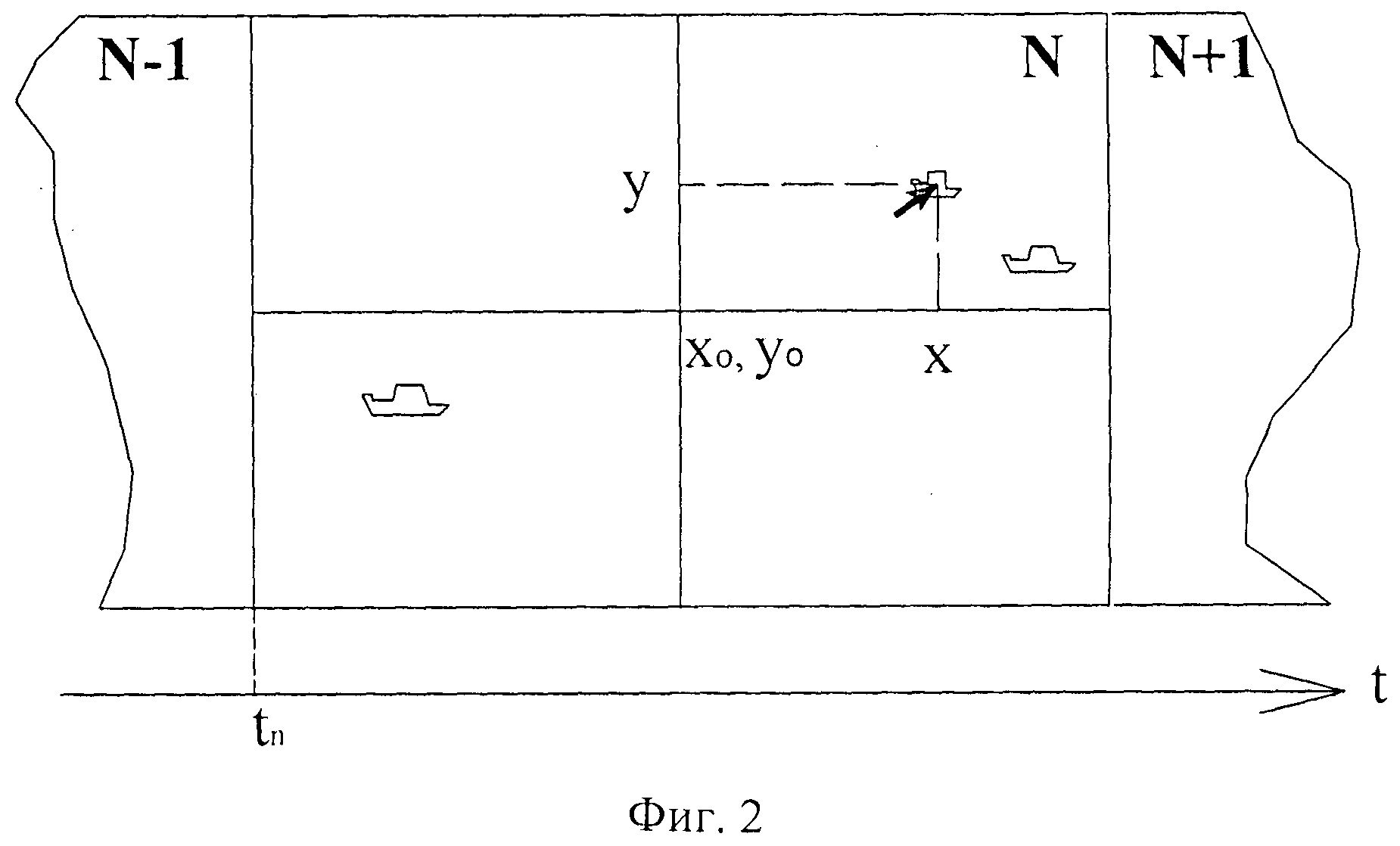
На фиг.1 показана структурная схема устройства. На фиг.2 приведен пример положения объекта на экране монитора и соответствующие этому положению его координаты.
Устройство непрерывного обзора с измерением дальности до объектов содержит сканирующую платформу 1 (фиг.1), на которой размещены оптико-электронный модуль 2 и модуль лазерного дальномера 3 с лазерным дальномером 4. Привод сканирования 5 и датчик угла сканирования 6 соединены с осью вращения сканирующей платформы 1. Вход привода сканирования 5 и выход датчика угла сканирования 6 через шину последовательного обмена 7 соединены с информационным входом/выходом вычислительного блока 8.
Оптико-электронный модуль 2 содержит оптическую систему 9, блок оптического компенсатора 10, телекамеру 11 и блок видеопамяти 12. В фокальной плоскости оптической системы 9 расположено МФПУ телекамеры 11. Телекамера 11 соединена своим выходом с входом блока видеопамяти 12, вход/выход которого через шину последовательного обмена 7 соединен с вычислительным блоком 8. Блок оптического компенсатора 10 установлен между оптической системой 9 и телекамерой 11 и через шину последовательного обмена 7 соединен своим входом с информационным входом/выходом вычислительного блока 8.
Модуль лазерного дальномера 3 содержит лазерный дальномер 4, узел оптических клиньев 13, выполненный в виде двух оптических клиньев 14 и 15, каждый их которых установлен в свою вращающуюся обойму 16 и 17 соответственно. Каждая обойма с клипом снабжена приводом 21, 22 и датчиком угла 23, 24 соответственно.
Информационные входы/выходы лазерного дальномера 4, привода сканирования 5, датчика угла сканирования 6, приводов клиньев 21 и 22, датчиков угла 23 и 24, блока видеопамяти 12, монитора 25 и устройства выбора объекта 26 через шину последовательного обмена 7 подключены к вычислительному блоку 8.
Устройство работает следующим образом.
Вычислительный блок 8 задает скорость и углы сканирования приводу сканирования 5, который вращает сканирующую платформу 1 с установленными на ней оптико-электронным модулем 2 и модулем лазерного дальномера 3. Оптическая система 9 с блоком оптического компенсатора 10 формируют последовательность оптических изображений, которую телекамера 11 преобразует в массив видеокадров. Эти видеокадры запоминают в блоке видеопамяти 12.
Оператор просматривает видеокадры на мониторе 25 (фиг.2) и с помощью устройства выбора объекта 26 (например, компьютерной «мыши») выбирает видеокадр (на фиг.2 это видеокадр N) и объект в нем, координаты которого требуется измерить. Оператор с помощью устройства выбора объекта 26 наводит курсор вычислительного блока 8 на изображение объекта на мониторе и дает команду на определение угловых координат объекта и дальности до него. По этой команде вычислительный блок 8 вычисляет горизонтальную x и вертикальную y координаты объекта в выбранном кадре относительно координатной системы фотоприемной матрицы с началом координат в ее центре x0 и y0.
На основании [М.М. Мирошников, Теоретические основы оптико-электронных приборов, Ленинград, Машиностроение, Ленинградское отделение, 1983, §6.2, стр.104-105] можно показать, что углы поворота клиньев, необходимые для вывода визирной оси лазерного дальномера на координаты X и Y, для положительных значений X равны
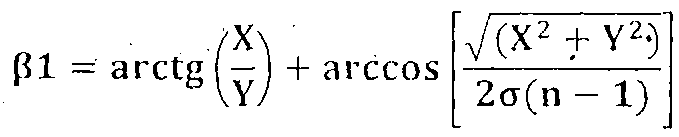 ,
,
 ,
,
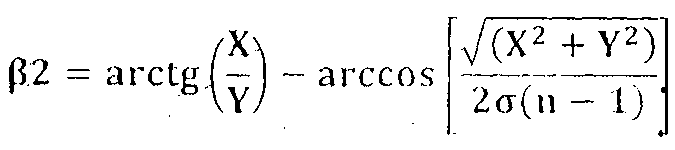
а для отрицательных значений X
 ,
,
 ,
,
при этом 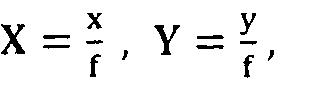
где β1 и β2 - углы поворота клиньев,
X и Y - угловые координаты объекта в поле зрения оптико-электронного модуля,
x и y - линейные координаты изображения объекта в координатной системе фотоприемной матрицы с началом координат в центре матрицы,
f - фокусное расстояние оптической системы оптико-электронного модуля,
σ - угол при вершине клиньев,
n - показатель преломления материала клиньев. С учетом представленных выше формул вычислительный блок 8 анализирует знак координаты объекта по оси ординат, определяет углы β1 и β2 и выдает на приводы 21 и 22 сигналы, пропорциональные этим вычисленным углам. Приводы 21 и 22 поворачивают клинья 14 и 15 и выводят визирную ось лазерного дальномера 4 на вычисленные углы.
Контроль поворота осуществляет вычислительный блок 8 по информации с датчиков угла 23 и 24.
После выполнения операции поворота визирной оси лазерного дальномера на заданные углы, вычислительный блок 8 выдает лазерному дальномеру 4 команду на подготовку замера дальности.
Получив сигнал готовности лазерного дальномера к замеру дальности, вычислительный блок 8 в следующем цикле сканирования выдает команду лазерному дальномеру 4 на измерение дальности в момент tn (фиг.2) начала формирования видеокадра с выбранным объектом, который совпадает с моментом прохождения визирной оси лазерного дальномера 4 через выбранный объект.
Способ центрирования панкратической оптической системы
Устройство кругового обзора
Оптический измеритель переменного тока в высоковольтных сетях
Способ и устройство контроля качества продукта
Устройство сканирования и слежения
Оптический измеритель переменного тока в высоковольтных сетях
Способ и устройство контроля качества продукта
Устройство сканирования и слежения
Локационный оптико-электронный модуль
Способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления
Дальномерно-визирный приборный комплекс
Способ выверки параллельности визирных осей мультиспектральных комплексов
Визир-дальномер
Устройство сканирования и стабилизации оптического изображения

