Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС
Вид РИД
Изобретение
Изобретение относится к управлению электродвигателями вращения антенны радиолокационной станции (РЛС) и может быть использовано в регулируемых электроприводах (РЭП).
В настоящее время, в связи с появлением новых средств воздушного нападения, возросли требования к системам воздушно-космической обороны по обнаружению низколетящих высокоскоростных объектов. Поэтому современные РЛС все чаще проектируются с активными фазированными антенными решетками (АФАР), дающими возможность новому поколению РЛС, несмотря на большие размеры и массу антенн, иметь высокие тактико-технические показатели.
Особенностью современных РЛС является то, что в ее автономной системе электроснабжения одной из самых мощных нагрузок является РЭП вращения антенны. Его мощность составляет 30…35% мощности, потребляемой РЛС от дизель-генератора (далее по тексту - генератор). РЛС является автономным объектом с первичным источником питания - генератором ограниченной мощности. В связи с чем, очень важно найти оптимальный вариант управления режимами работы РЭП, от качественной работы которого зависит эффективность работы всей РЛС.
Известен способ управления РЭП, который обеспечивает постоянство скорости вращения антенны.
Этот способ реализуется системой управления электродвигателем вращения антенны РЛС [1]. РЭП состоит из генератора, автотрансформатора (АТР), асинхронного двигателя (АД), электромашинного усилителя (ЭМУ), двигателя постоянного тока (ДПТ).
Достоинством такой системы является плавность регулирования скорости вращения антенны, включая режим пуска. Так как к генератору этот электропривод подключен «гонным» для ЭМУ асинхронным двигателем с короткозамкнутым ротором (АД КЗ), то при пуске ток в обмотках статора превышает номинальный в 5…7 раз. При подключении АД КЗ к генератору ограниченной мощности наблюдается провал напряжения сети, что снижает электромагнитную совместимость электропривода.
Для обеспечения пуска АД КЗ необходимо устанавливать токоограничивающие элементы: резисторы, дроссели, автотрансформаторы, что приводит к возрастанию массы и габаритов электропривода. Происходит снижение надежности, так как для коммутации токоограничивающих элементов применяются электромеханические устройства: реле, контакторы.
Недостатки такого РЭП заключаются в следующем:
- исполнительным является коллекторный двигатель постоянного тока (ДПТ), ненадежно работающий в сложных климатических условиях;
- применяются токоограничивающие и электромеханические элементы, осуществляющие пуск «гонного» для ЭМУ АД КЗ, что снижает надежность и увеличивает массогабаритные показатели.
Наиболее близким аналогом, принятым за прототип, является система управления вентильным электродвигателем вращения антенны РЛС [2], в которой также используется способ управления РЭП, который обеспечивает постоянство скорости вращения антенны.
При таком способе управления электродвигателем вращения антенны РЛС используется сигнал, пропорциональный току статора электродвигателя, и сигнал, пропорциональный скорости вращения вала электродвигателя, воздействующие на инвертор для обеспечения постоянной скорости вращения вала электродвигателя и отключение его при превышении током статора допустимой величины.
Этот способ реализуется системой, содержащей входные клеммы выпрямителя и выпрямитель, фильтр (дроссель, конденсатор), датчики тока, датчик напряжения, схему торможения, инвертор, блок драйверов, устройство управления, датчик угла поворота ротора, являющийся датчиком скорости, электродвигатель.
Недостатками способа управления электродвигателя как аналога, так и прототипа являются низкие технико-экономические характеристики РЭП РЛС: надежность, электромагнитная совместимость, масса, габариты, стоимость. Вследствие этого они имеют ограниченную область применения.
Обычно РЛС подобного типа имеют три угловые скорости вращения антенны, например, 12, 6, 3 об/мин. Это связано с режимами работы РЛС и ветровыми нагрузками на полотно антенны.
В [3] приведены графики зависимости момента на валу двигателя от угла поворота антенны, скорости ветра и скорости вращения антенны.
Из графиков следует, что момент на валу электродвигателя имеет большую переменную составляющую. Номинальная мощность электродвигателя выбирается исходя из эквивалентного (среднеквадратичного) момента на его валу [3]. Наименьшая величина эквивалентного момента на валу электродвигателя имеет место при минимальной величине его переменной составляющей. В этом случае среднеквадратичное значение момента равно его среднему значению, а среднеквадратичная мощность на валу электродвигателя равна величине его средней мощности. Поскольку выбор электродвигателя осуществляется по величине его среднеквадратичного момента на валу, то запас по номинальной мощности электродвигателя составляет 25...30%. Таким образом, приходится применять более дорогой электродвигатель, имеющий большую массу и габариты.
Если выбор электродвигателя осуществляется по величине его среднеквадратичного момента на валу, то требуется генератор с большей величиной номинального тока. Следовательно, генератор должен иметь определенный запас по мощности. Он также будет иметь большую стоимость, массу и габариты.
Наличие большой переменной составляющей мощности на валу электродвигателя обуславливает большую переменную составляющую мощности, потребляемой им от генератора.
Переменная составляющая потребляемой электродвигателем мощности вызывает перегрузки генератора ограниченной мощности и обуславливает его неустойчивую работу. Снижается электромагнитная совместимость РЭП. Ухудшается тактическая характеристика РЛС - надежность (функциональная) [4].
Отмеченные недостатки ухудшают технико-экономические характеристики РЛС: надежность, электромагнитную совместимость, массу, габариты, стоимость, что и ограничивает область применения системы управления электродвигателем вращения антенны РЛС.
Техническим результатом изобретения является улучшение технико-экономических характеристик, а именно электромагнитной совместимости, снижение массы, габаритов, стоимости за счет уменьшения переменной составляющей мощности на валу электродвигателя (переменной составляющей амплитуды тока статора, момента на валу электродвигателя), повышение надежности. В предлагаемом решении среднеквадратичное значение мощности на валу электродвигателя равно среднему значению этой мощности, что снижает номинальную мощность электродвигателя. При номинальной нагрузке на валу, электродвигатель имеет максимальный КПД и коэффициент мощности. Следовательно, электродвигатель эксплуатируется в оптимальном режиме. Также уменьшается мощность, потребляемая от генератора, что приводит к снижению его номинальной мощности. Происходит снижение массы, габаритов и стоимости генератора.
Расширяется область применения предлагаемой системы управления электродвигателем и улучшаются технико-экономические характеристики РЛС [4].
Повышается электромагнитная совместимость РЭП и, следовательно, тактическая характеристика РЛС - надежность (функциональная) [4].
Возможность отклонения скорости вращения антенны РЛС в допустимых пределах позволяет значительно уменьшить переменную составляющую мощности на валу электродвигателя и уменьшить его номинальную мощность.
Как ниже будет показано, отклонение скорости вращения антенны на 10%, позволяет уменьшить пульсации мощности на валу электродвигателя в 2,25 раза и, следовательно, уменьшить номинальную мощность электродвигателя на 26%.
Согласно предлагаемому способу управления в стационарном режиме работы РЭП с вентильным электродвигателем переменные составляющие угловой скорости вращения его вала ω~, момента Мд~ и потребляемой мощности Рд~ приводного электродвигателя при малых значениях переменной составляющей скорости вращения его вала описываются следующей системой операторных уравнений
где Мс~ - переменная составляющая момента сопротивления, обусловленная ветровой нагрузкой, приведенная к валу электродвигателя; J - момент инерции РЭП, приведенный к валу электродвигателя; ωзад= - заданное среднее значение скорости вращения вала электродвигателя; k - коэффициент пропорциональности, величина которого определяется относительной величиной выходного напряжения регулятора в контуре стабилизации относительного значения пульсации скорости вращения вала электродвигателя; s - оператор преобразования Лапласа.
Решая систему (1) при синусоидальном законе изменения переменной составляющей момента сопротивления на валу

находим аналитическую связь между относительными пульсациями скорости δω * и коэффициентом k, а также амплитуду переменной составляющей момента на валу электродвигателя РЭП и потребляемой им мощности

или

где  коэффициент пульсации скорости вала электродвигателя в стационарном режиме работы системы; ωm~ - амплитуда переменной составляющей скорости вращения вала электродвигателя; 2ωm~ - изменение переменной составляющей скорости вращения вала электродвигателя;
коэффициент пульсации скорости вала электродвигателя в стационарном режиме работы системы; ωm~ - амплитуда переменной составляющей скорости вращения вала электродвигателя; 2ωm~ - изменение переменной составляющей скорости вращения вала электродвигателя;  - передаточное отношение редуктора РЭП; Ωзад - заданное значение скорости вращения антенны;
- передаточное отношение редуктора РЭП; Ωзад - заданное значение скорости вращения антенны;  - относительные значения амплитуд переменных составляющих момента и мощности электродвигателя РЭП; Рст=ωзад=Мст - амплитуда переменной составляющей мощности, обусловленная моментом сопротивления; Мдт, Рдт - амплитуды переменных составляющих момента и мощности, соответственно, которые определяются по формулам
- относительные значения амплитуд переменных составляющих момента и мощности электродвигателя РЭП; Рст=ωзад=Мст - амплитуда переменной составляющей мощности, обусловленная моментом сопротивления; Мдт, Рдт - амплитуды переменных составляющих момента и мощности, соответственно, которые определяются по формулам
Относительные значения этих величин будут


Из выражения (8) следует, что пульсации мощности (коэффициент пульсации мощности), потребляемой электродвигателем, зависят от параметров РЭП, режима его работы, ветровой нагрузки, а также допустимой величины пульсации скорости δω*. При этом, чем больше допустимое значение δω*, тем меньше величина пульсаций мощности потребляемой от генератора, и тем выше уровень электромагнитной совместимости РЭП.
В известном способе управления δω*=0 и, согласно формуле (8), относительное значение амплитуды переменных составляющих момента и мощности электродвигателя РЭП имеют значения М* дт=Р* дт=1.
Применение предлагаемого способа, например, при δω*=0,1 и параметрах привода: Ωзад=12 мин-1 (Ωзад=1,26 рад/с); J=1,14 кг/м2; Мст=40 Нм; Мс=30 Нм; i=245, в соответствии с (8), дает значения М* дт=Р* дт=0,45.
Таким образом, пульсации потребляемой мощности снизились в 2,25 раза.
Эквивалентное значение мощности электродвигателя при гармоническом характере переменной составляющей момента сопротивления будет

Относительное эквивалентное значение мощности электродвигателя определяется по формуле

В соответствии с (10) относительные эквивалентные значения мощности электродвигателя в известном и предлагаемом способе управления при указанных параметрах привода будут, соответственно, иметь значения


Сопоставление полученных результатов показывает, что предлагаемый способ позволяет на 26% уменьшить требуемую номинальную мощность электродвигателя РЭП АФАР при одном и том же среднем значении мощности на его валу.
Способ управления электродвигателем вращения антенны РЛС заключается в использовании сигнала, пропорционального току статора электродвигателя, и сигнала, пропорционального скорости вращения вала электродвигателя, воздействующих на инвертор для получения требуемых режимов работы электродвигателя.
Из сигнала, пропорционального току статора электродвигателя, и сигнала, пропорционального скорости вращения вала электродвигателя, вычисляют среднюю мощность и амплитуду переменной составляющей мощности на валу электродвигателя, а также коэффициент пульсаций мощности и мгновенную мощность на валу электродвигателя.
Коэффициент пульсаций мощности на валу электродвигателя определяют как отношение амплитуды переменной составляющей мощности к средней мощности.
Мгновенную мощность на валу электродвигателя определяют как сумму переменной составляющей этой мощности и среднего значения мощности на валу.
Из сигнала, пропорционального скорости вращения вала электродвигателя, вычисляют его среднюю скорость и амплитуду переменной составляющей скорости, а также коэффициент пульсаций скорости.
Коэффициент пульсаций скорости вращения определяют как отношение амплитуды переменной составляющей скорости к средней заданной скорости вращения вала электродвигателя.
Коэффициент пульсаций скорости поддерживают на допустимом уровне, путем воздействия на инвертор, сигналом, сформированным в устройстве коррекции момента, пропорциональным переменной составляющей момента сопротивления на валу электродвигателя и находящимся с этим сигналом в противофазе.
Это позволяет получить минимальный коэффициент пульсаций мощности на валу электродвигателя при допустимом уровне пульсаций скорости вращения вала.
Реализовать предлагаемый способ и достигнуть требуемого технического результата можно используя систему управления электродвигателем вращения антенны РЛС, включающую в себя входные клеммы выпрямителя, выпрямитель, инвертор, электродвигатель, датчик тока, датчик скорости, блок управления инвертором и блок драйверов, в которую введены устройство коррекции момента и вычислители: мощности, коэффициента пульсаций мощности, параметров скорости вращения, коэффициента пульсаций скорости.
При этом входные клеммы выпрямителя подключены к генератору (на фигуре не изображен). Выход выпрямителя подключен к первому входу инвертора. Выход инвертора подключен к входу датчика тока, второй выход которого подключен к электродвигателю, выход которого является выходом системы. Вал электродвигателя механически соединен с редуктором, который, в свою очередь, механически соединен с антенной (на фигуре не изображены). На валу электродвигателя установлен датчик скорости, например тахогенератор. При этом выход датчика скорости подсоединен к третьему входу блока управления инвертором, к входу вычислителя параметров скорости вращения, к первому входу устройства коррекции момента, его выход подключен к первому входу блока управления инвертором, выход которого соединен с входом блока драйверов. Выход блока драйверов подключен ко второму входу инвертора.
Первый выход датчика тока подключен ко второму входу блока управления инвертором и к первому входу вычислителя мощности на валу электродвигателя.
Первый выход вычислителя мощности соединен со вторым входом устройства коррекции момента, а второй и третий выходы - с первым и вторым входами вычислителя коэффициента пульсаций мощности, выход которого соединен с третьим входом вычислителя коэффициента пульсаций скорости.
Первый выход вычислителя параметров скорости вращения подключен ко второму входу вычислителя мощности, второй выход к первому входу вычислителя коэффициента пульсаций скорости, а его третий выход - ко второму входу вычислителя коэффициента пульсаций скорости, выход которого соединен с третьим входом вычислителя мощности.
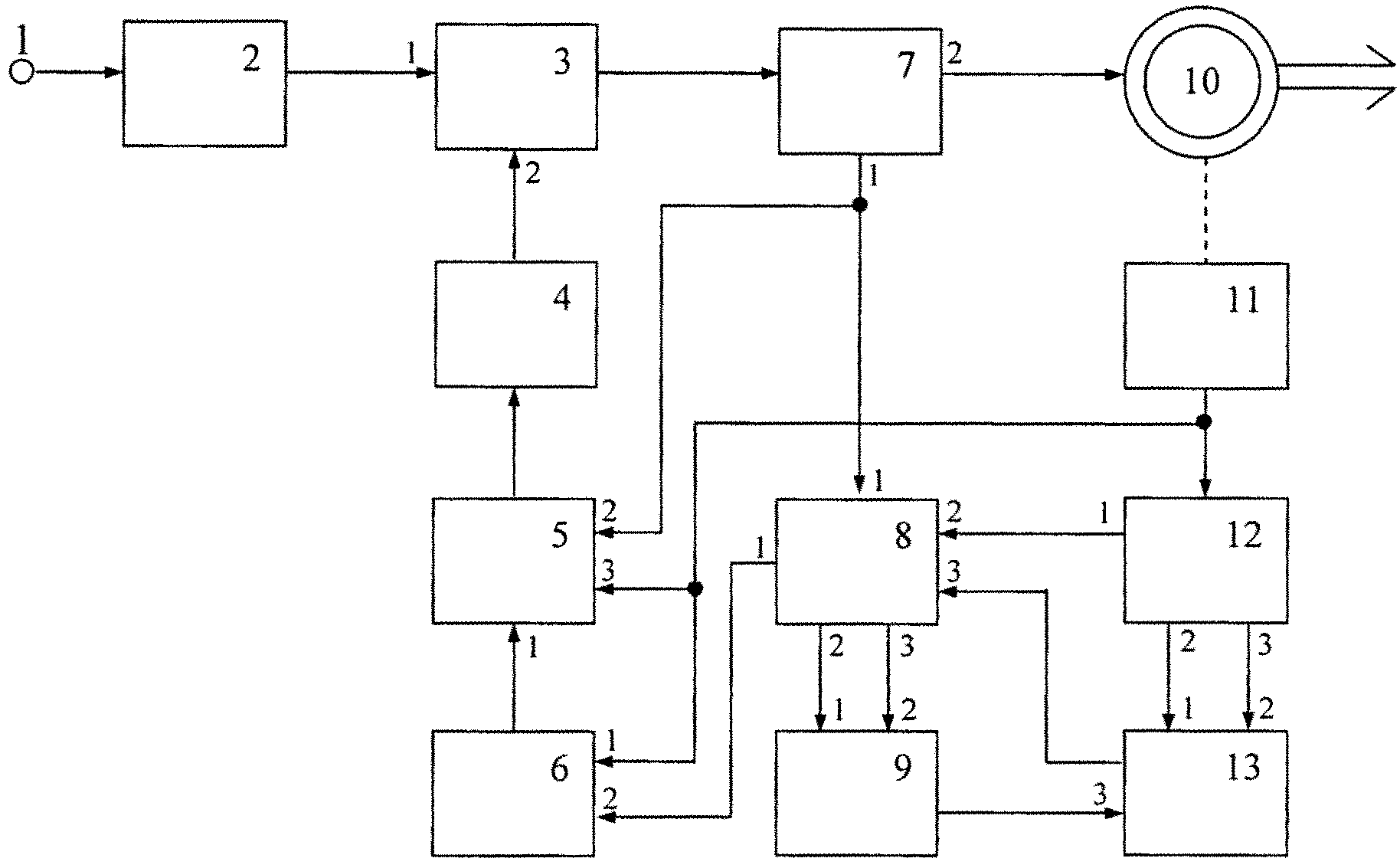
На фигуре представлена структурная схема системы управления электродвигателем вращения антенны РЛС и приняты следующие обозначения:
1 - входные клеммы выпрямителя;
2 - выпрямитель;
3 - инвертор;
4 - блок драйверов;
5 - блок управления инвертором;
6 - устройство коррекции момента;
7 - датчик тока;
8 - вычислитель мощности;
9 - вычислитель коэффициента пульсаций мощности;
10 - электродвигатель;
11 - датчик скорости;
12 - вычислитель параметров скорости вращения;
13 - вычислитель коэффициента пульсаций скорости.
Система управления электродвигателем вращения антенны РЛС, содержит: входные клеммы выпрямителя 1, выпрямитель 2, инвертор 3, электродвигатель 10, датчик тока 7, датчик скорости 11, блок управления инвертором 5, блок драйверов 4, устройство коррекции момента 6, вычислители: мощности 8, коэффициента пульсаций мощности 9, параметров скорости вращения 12, коэффициента пульсаций скорости 13.
В качестве электродвигателя 10 может быть использован вентильный электродвигатель (ВД) или асинхронный электродвигатель с короткозамкнутым ротором (АД КЗ). При использовании ВД инвертор 3 выполняет функцию коммутатора. При использовании АД КЗ инвертор 3 выполняет функцию преобразователя частоты [5].
При этом выход генератора (на фигуре не изображен) подключен к входным клеммам выпрямителя 1, которые соединены с выпрямителем 2. Выход выпрямителя 2 подключен к первому входу инвертора 3. Выход инвертора 3 соединен с входом датчика тока 7, второй выход датчика тока 7, подключен к электродвигателю 10. Вал электродвигателя 10 механически соединен с датчиком скорости 11 и затем редуктором, который, в свою очередь, механически соединен с антенной (на фигуре не изображены).
Первый выход датчика тока 7 подключен ко второму входу блока управления инвертором 5 и к первому входу вычислителя мощности 8, первый выход которого соединен со вторым входом устройства коррекции момента 6. Второй и третий выходы вычислителя мощности 8 соединены с первым и вторым входами вычислителя коэффициента пульсаций мощности 9, соответственно, выход которого соединен с третьим входом вычислителя коэффициента пульсаций скорости 13.
На валу электродвигателя 10 установлен датчик скорости 11. При этом выход датчика скорости 11 подсоединен к третьему входу блока управления инвертором 5, к первому входу устройства коррекции момента 6 и к входу вычислителя параметров скорости вращения 12.
Первый выход вычислителя параметров скорости вращения 12 соединен со вторым входом вычислителя мощности 8 и с первым входом вычислителя коэффициента пульсаций скорости 13, а его второй выход - со вторым входом вычислителя коэффициента пульсаций скорости 13. Выход вычислителя коэффициента пульсаций скорости 13 подключен к третьему входу вычислителя мощности 8.
Система управления электродвигателем антенны РЛС работает следующим образом.
Включают дизель, и начинается вращение ротора генератора (на фигуре не изображены), на выходе которого появляется трехфазное напряжение 380 В, 50 Гц, которое подают на входные клеммы выпрямителя 1, далее на выпрямитель 2. Одновременно требуемые напряжения питания подаются на другие блоки и устройства системы управления (на фигуре не изображены).
С выхода выпрямителя 2 постоянное напряжение подают на первый вход инвертора 3.
С блока управления инвертором 5 подают на вход блока драйверов 4 сигналы, где формируют импульсы для управления транзисторами инвертора 3.
Трехфазное напряжение с выхода инвертора 3 подают на вход электродвигателя 10. Начинается плавный разгон электродвигателя 10 и через редуктор - антенны.
Разгон электродвигателя 10 и, следовательно, антенны осуществляют до заданной величины угловой скорости антенны, которую определяют с помощью датчика скорости 11. Сигнал с выхода датчика скорости 11 подают на блок управления инвертором 5, далее через блок драйверов 4 и инвертор 3 осуществляют соответствующее воздействие на электродвигатель 10.
В процессе вращения антенны при возрастании момента на валу электродвигателя 10 происходит увеличение тока его статора. С первого выхода датчика тока 7 соответствующий сигнал подают на второй вход блока управления инвертором 5, далее через блок драйверов 4 осуществляют соответствующее воздействие на инвертор 3, скорость вращения вала электродвигателя 10 уменьшается, что приводит к уменьшению момента на его валу и снижению величины тока статора.
В процессе вращения антенны при снижении момента на валу электродвигателя 10 происходит уменьшение тока статора. С первого выхода датчика тока 7 соответствующий сигнал подают на первый вход блока управления инвертором 5, который через блок драйверов 4 осуществляет соответствующее воздействие на инвертор 3, скорость вращения вала электродвигателя 10 увеличивается, что приводит к увеличению момента на его валу и возрастанию величины тока статора.
При достижении требуемой величины скорости вращения антенны, начинают регулирование коэффициента пульсаций мощности и коэффициента пульсаций скорости вращения вала электродвигателя.
Сигнал с выхода датчика скорости 11 подают на вход вычислителя параметров скорости вращения 12 вала электродвигателя 10, преобразуют в сигнал, пропорциональный средней скорости, и сигнал, пропорциональный амплитуде переменной составляющей скорости вращения вала электродвигателя 10.
С первого выхода вычислителя параметров скорости вращения 12 сигнал, пропорциональный средней скорости вращения вала электродвигателя 10, подают на второй вход вычислителя мощности 8 и на первый вход вычислителя коэффициента пульсаций скорости 13.
Со второго выхода вычислителя параметров скорости вращения 12 сигнал, пропорциональный амплитуде переменной составляющей скорости вращения вала электродвигателя 10, подают на второй вход вычислителя коэффициента пульсаций скорости 13.
С выхода вычислителя коэффициента пульсаций скорости 13 сигнал, пропорциональный коэффициенту пульсаций скорости вращения вала электродвигателя 10, поступает на третий вход вычислителя мощности 8.
С первого выхода вычислителя параметров скорости вращения 12 сигнал, пропорциональный средней скорости вращения вала электродвигателя 10, поступает на второй вход вычислителя мощности 8, а с вычислителя коэффициента пульсаций скорости 13 сигнал, пропорциональный коэффициенту пульсаций скорости вращения вала, поступает на третий вход вычислителя мощности 8.
С первого выхода датчика тока 7 подают сигнал на первый вход вычислителя мощности 8, где его преобразуют в сигнал, пропорциональный моменту на валу электродвигателя 10.
Из сигнала момента на валу электродвигателя 10 и сигнала с выхода датчика скорости 11 определяется момент сопротивления на валу, из сигнала момента сопротивления определяется его переменная составляющая и среднее значение. Сигнал средней скорости вращения вала электродвигателя 10 и сигнал его среднего момента сопротивления на валу преобразуются в среднее значение мощности на валу электродвигателя 10, а сигналы коэффициента пульсаций скорости вращения вала и переменной составляющей момента сопротивления на валу электродвигателя преобразуются в переменную составляющую мощности. По сигналам среднего значения и переменной составляющей мощности на валу электродвигателя вычисляется сигнал мгновенной мощности на валу электродвигателя 10.
Сигнал мгновенной мощности с первого выхода вычислителя мощности 8 подают на второй вход устройства коррекции момента 6.
Со второго выхода вычислителя мощности 8 сигнал, пропорциональный средней мощности на валу электродвигателя 10, подают на первый вход вычислителя коэффициента пульсаций мощности 9.
С третьего выхода вычислителя мощности 8 сигнал, пропорциональный амплитуде переменной составляющей мощности на валу электродвигателя 10, подают на второй вход вычислителя коэффициента пульсаций мощности 9.
На первый вход устройства коррекции момента 6 на валу электродвигателя 10 с датчика скорости 11 подают сигнал угловой скорости вращения вала электродвигателя 10, а на его второй вход - сигнал мгновенной мощности на его валу с первого выхода вычислителя мощности 8. Вычисляют сигнал коррекции момента на валу электродвигателя 10, который подают на блок управления инвертором 5. Далее посредством блока драйверов 4 производится управление транзисторами инвертора 3 и соответствующее изменение скорости вращения вала электродвигателя 10. В результате коэффициент пульсаций мощности на валу электродвигателя 10 уменьшается. Переменная составляющая мощности на валу практически отсутствует.
При изменении скорости ветра соответственно изменяется момент на валу электродвигателя 10, ток статора, мощность на валу электродвигателя 10, коэффициент пульсаций мощности на валу электродвигателя 10.
Сигнал с выхода вычислителя коэффициента пульсаций мощности 9 подают на третий вход вычислителя коэффициента пульсаций скорости 13. Происходит изменение сигнала коэффициента пульсаций скорости. С выхода вычислителя коэффициента пульсаций скорости 13 измененный сигнал подают на третий вход вычислителя мощности 8. Происходит изменение сигнала мгновенной мощности на валу электродвигателя 10, который подают с первого выхода вычислителя мощности 8 на второй вход устройства коррекции момента 6.
Далее сигнал проходит по цепи: устройство коррекции момента 6, блок управления инвертором 5, блок драйверов 4, транзисторы инвертора 3. Происходит изменение скорости вращения вала электродвигателя 10 и соответствующее изменение коэффициента пульсаций скорости, что вызывает соответствующее изменение коэффициента пульсаций мощности.
Обратная связь по коэффициенту пульсаций мощности на валу электродвигателя 10 и коэффициенту пульсаций скорости вращения вала электродвигателя 10 обеспечивает получение минимального коэффициента пульсаций мощности на валу электродвигателя 10 при соответствующем изменении коэффициента пульсаций скорости вращения вала электродвигателя 10.
При уменьшении ветровой нагрузки на антенну уменьшается коэффициент пульсаций скорости вращения вала электродвигателя 10, а коэффициент пульсаций мощности на валу электродвигателя 10 практически не изменяется.
При увеличении ветровой нагрузки на антенну коэффициент пульсаций скорости вращения вала электродвигателя 10 увеличивается, а коэффициент пульсаций мощности на валу электродвигателя 10 практически не изменяется.
Однако, увеличение коэффициента пульсаций скорости вращения вала электродвигателя 10 и, следовательно, антенны не должен превышать допустимую величину (10%). При превышении допустимой величины коэффициента пульсаций скорости вращения, коэффициент пульсаций мощности на валу электродвигателя 10 значительно возрастает. Необходимо переключение редуктора, обеспечивающее пониженную скорость вращения антенны.
Поскольку коэффициент пульсаций мощности на валу электродвигателя минимальный, то его номинальную мощность выбирают исходя из среднего значения момента, что позволяет уменьшить величину этой мощности на 20…30%. Соответственно уменьшаются масса, габариты и стоимость электродвигателя.
Следует также отметить, что электродвигатель имеет максимальный КПД при номинальной нагрузке на валу. Следовательно, возрастает КПД электродвигателя.
При снижении мощности электродвигателя для его питания требуется генератор с меньшей номинальной мощностью. Он также будет иметь меньшую стоимость, массу и габариты.
Отсутствие переменной составляющей мощности, потребляемой РЭП, устраняет возможность перегрузки генератора ограниченной мощности и обеспечивает его устойчивую работу. Повышается электромагнитная совместимость РЭП. Улучшается тактическая характеристика РЛС - надежность (функциональная) [4].
Отмеченные достоинства расширяют область применения предлагаемого способа и системы управления электродвигателем вращения антенны.
Таким образом, применение предлагаемого способа и системы, реализующей его, обуславливает с введением новых элементов - устройства коррекции момента и вычислителей: мощности, коэффициента пульсаций мощности, параметров скорости вращения, коэффициента пульсаций скорости с соответствующими связями, позволяют улучшить технико-экономические характеристики РЛС:
- уменьшить номинальную мощность электродвигателя и генератора;
- обеспечить высокий КПД и коэффициент мощности электродвигателя;
- повысить надежность (функциональную);
- уменьшить стоимость, массу и габариты РЭП и генератора;
- повысить электромагнитную совместимость РЭП.
Из вышеизложенного следует, что выполненная на базе предлагаемого способа система управления электроприводом антенны РЛС имеет лучшие технико-экономические характеристики относительно прототипа и оптимальна с точки зрения электромагнитной совместимости, а именно мощность на валу электродвигателя практически постоянна. В результате потребляемая от генератора мощность выравнивается, электромагнитная совместимость возрастает, что положительно влияет на эффективность работы РЛС в целом.
Источники информации
1. Подвижная радиолокационная станция П-18. Военное издательство Министерства обороны СССР. М.: 1978. - 320 стр.
2. Кириенко В.П., Стрелков В.Ф., Тетенькин Л.В. Система электропитания радиолокационного комплекса /Сборник докладов 1-й Всероссийской конференции по средствам электропитания. Санкт -Петербург, 2007, с.21-27.
3. Хватов СВ., Стрелков В.Ф., Тетенькин Л.В. Оптимизация режимов работы электроприводов вращения антенно-мачтовых устройств РЛС // Известия ТулГУ., Технические науки., Вып.3: в 5 ч. Ч.3, 2010, с.186…190.
4. Радиотехнические системы. Под редакцией проф. Ю.М. Казаринова. - М.: «Высшая школа», 1990, 496 стр.
5. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. М.: «AKADEMA», 2006, 265 стр.
Высокочастотный преобразователь
Стабилизированный квазирезонансный преобразователь
Источник электропитания аппаратуры радиолокационной станции
Система управления вентильным электродвигателем вращения антенны рлс
Способ управления зарядным устройством емкостного накопителя энергии с дозирующими конденсаторами
Зарядное устройство емкостного накопителя энергии
Высокочастотный преобразователь
Стабилизированный квазирезонансный преобразователь
Источник электропитания аппаратуры радиолокационной станции
Система управления вентильным электродвигателем вращения антенны рлс
Способ управления зарядным устройством емкостного накопителя энергии с дозирующими конденсаторами
Зарядное устройство емкостного накопителя энергии
Система управления электродвигателем вращения антенны рлс
Система управления вентильным электродвигателем вращения антенны рлс
Генератор импульсных напряжений
Стабилизированный квазирезонансный преобразователь

