Результат интеллектуальной деятельности: УСТРОЙСТВО ВЫБОРА РЕЖИМА ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА С ЧЕТЫРЬМЯ ВЕДУЩИМИ КОЛЕСАМИ
Вид РИД
Изобретение
Изобретение относится к устройству управления для выбора режимов привода автотранспортного средства. В частности, оно относится к устройству, позволяющему адаптировать к работе транспортное средство с четырьмя ведущими колесами режим привода транспортного средства, задаваемый водителем.
Таким образом, изобретение относится к области транспортных средств, содержащих единые трансмиссии, при которых все колеса транспортного средства являются ведущими и при которых можно предусмотреть, по меньшей мере, два режима привода.
Например, транспортное средство может иметь три режима привода, а именно:
- режим привода, называемый режимом «4×4 полного привода» (привод на все четыре колеса), в котором максимальный момент передается на задний мост без разности скорости между двумя осями, передней и задней, транспортного средства;
- режим привода «4×4 автоматический», в котором между двумя осями, передней и задней, транспортного средства регулируют разность скорости; и
- режим привода «4×2» (привод на два колеса), в котором транспортное средство использует два ведущих колеса.
Режимы привода транспортного средства с четырьмя ведущими колесами адаптируют к конкретным условиям работы транспортного средства. Например, режим 4×4 полного привода используют для трудных участков дороги, по которым транспортное средство движется с малой или средней скоростью. Действительно, режим 4х4 полного привода позволяет передавать максимальный момент между двумя осями, передней и задней, транспортного средства. Этот режим наиболее подходит для таких дорожных условий, но приводит к перегреву муфты и к нарушению ее работы и даже к поломке, если одна из осей буксует достаточно долго и сцепление полного привода передает момент.
С другой стороны, режимы, - автоматический режим 4×4 и режим привода на два колеса 4×2, - используют для участков относительно ровной и малопересеченной местности, по которым транспортное средство может двигаться с более высокой скоростью, например, при использовании на автодороге или при использовании в так называемом вседорожном варианте.
Таким образом, следует избегать режима 4х4 полного привода, когда транспортное средство движется на высокой скорости или при значительном буксовании между передней и задней осями, даже если этот режим задает водитель.
Задача изобретения состоит в обеспечении адаптации к работе транспортного средства задаваемого водителем режима привода транспортного средства с четырьмя ведущими колесами.
В связи с этим первым объектом изобретения является устройство выбора режима привода для автотранспортного средства, по меньшей мере, с четырьмя ведущими колесами, содержащее средство выбора режима привода транспортного средства, приводимое в действие водителем, и средства определения, по меньшей мере, одной переменной величины, характеризующей работу транспортного средства.
Это устройство дополнительно содержит средства обработки, выполненные с возможностью обработки выбранного режима привода на основании значения указанной, по меньшей мере, одной переменной, характеризующей работу транспортного средства, чтобы задать режим привода для транспортного средства.
Согласно другому отличительному признаку этого устройства, средства определения указанной, по меньшей мере, одной переменной, характеризующей работу транспортного средства, содержат средства фильтрации указанных переменных.
Оно может дополнительно содержать средства кодирования фильтрованных переменных, полученных от средств фильтрации.
Например, средства кодирования содержат средства сравнения указанных переменных, по меньшей мере, с одним пороговым значением для присвоения заранее определенного значения указанным фильтрованным переменным в зависимости от результата указанного сравнения.
Средства кодирования могут дополнительно содержать средства кодирования режима привода, выбранного водителем.
Согласно другому отличительному признаку устройства выбора, средства кодирования режима привода, выбранного водителем, содержат средства для присвоения заранее определенного значения кодирования для каждого режима привода, который может быть выбран.
Устройство может дополнительно содержать средства сравнения, выполненные с возможностью сравнения кодированных переменных, характеризующих работу транспортного средства, с пороговым значением, соответствующим значению, допустимому для каждого выбранного режима привода.
Вторым объектом изобретения является способ выбора режима привода для автотранспортного средства, по меньшей мере, с четырьмя ведущими колесами. Этот способ содержит следующие этапы:
- выбор водителем транспортного средства режима привода;
- считывание, по меньшей мере, одной переменной, характеризующей работу транспортного средства; и
- адаптацию выбранного режима привода на основании значения указанной, по меньшей мере, одной переменной, характеризующей работу транспортного средства.
В варианте применения производят фильтрацию переменных, характеризующих работу транспортного средства.
Например, дополнительно осуществляют кодирование фильтрованных переменных, характеризующих работу транспортного средства.
Во время кодирования можно осуществлять сравнение фильтрованных переменных с пороговым значением, и значение кодирования присваивают каждой фильтрованной переменной в зависимости от результата указанного сравнения.
Например, переменную кодирования присваивают каждому фильтрованному режиму привода, выбранному водителем.
Кроме того, осуществляют, например, сравнение кодированных переменных с пороговым значением, соответствующим значению, допустимому для каждого выбранного режима привода.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего подробного описания варианта осуществления, представленного в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
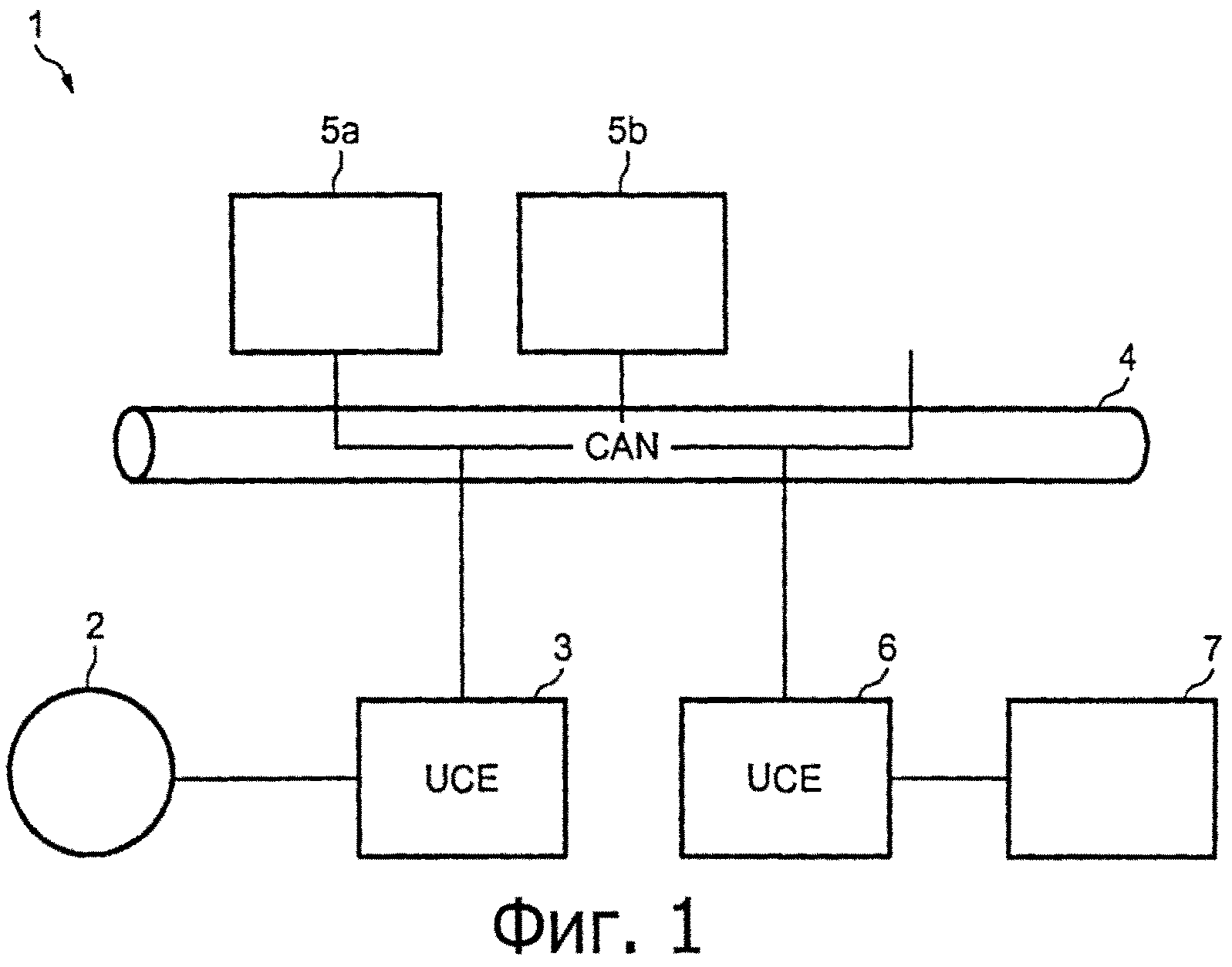
На фиг.1 схематично показана общая архитектура устройства выбора режима привода в соответствии с настоящим изобретением;
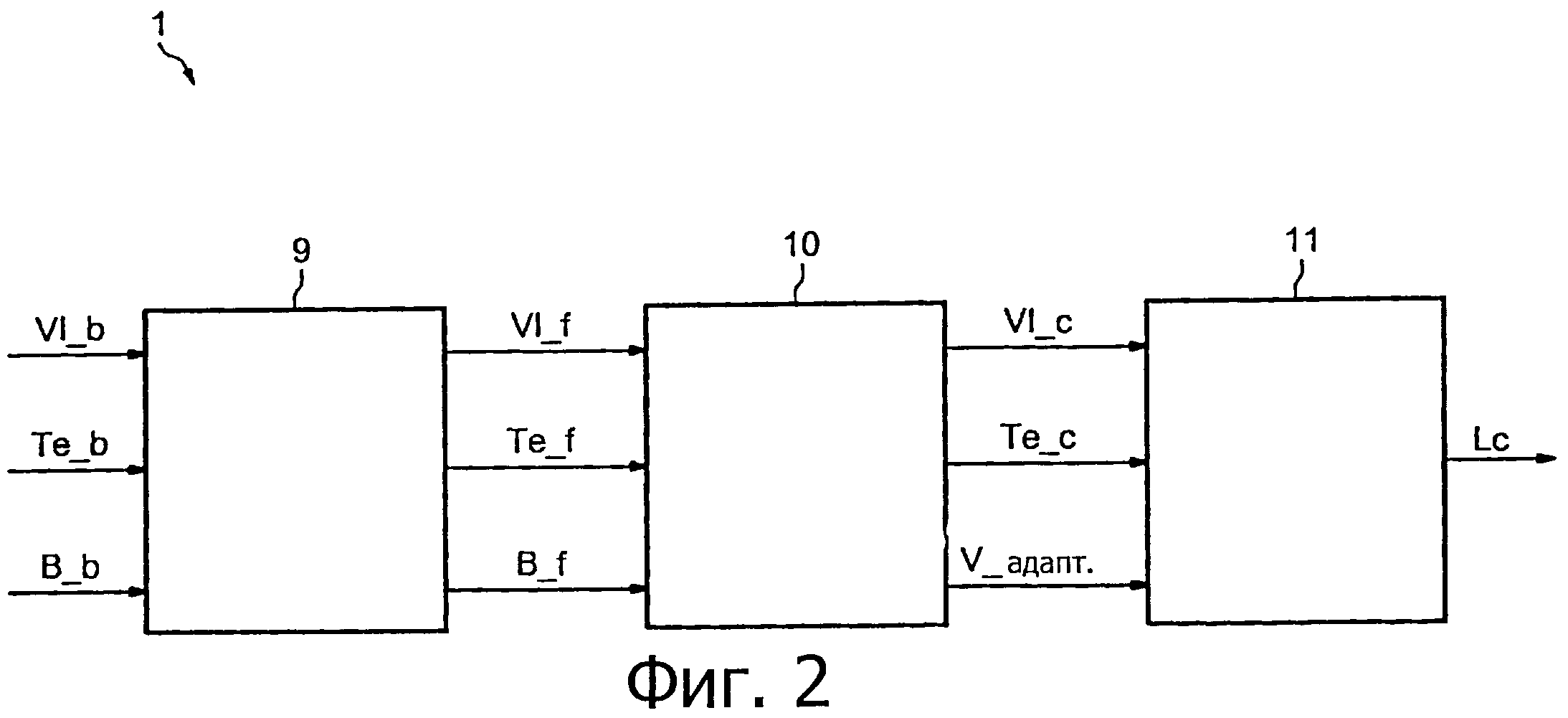
на фиг.2 показана схема работы устройства, изображенного на фиг.1;
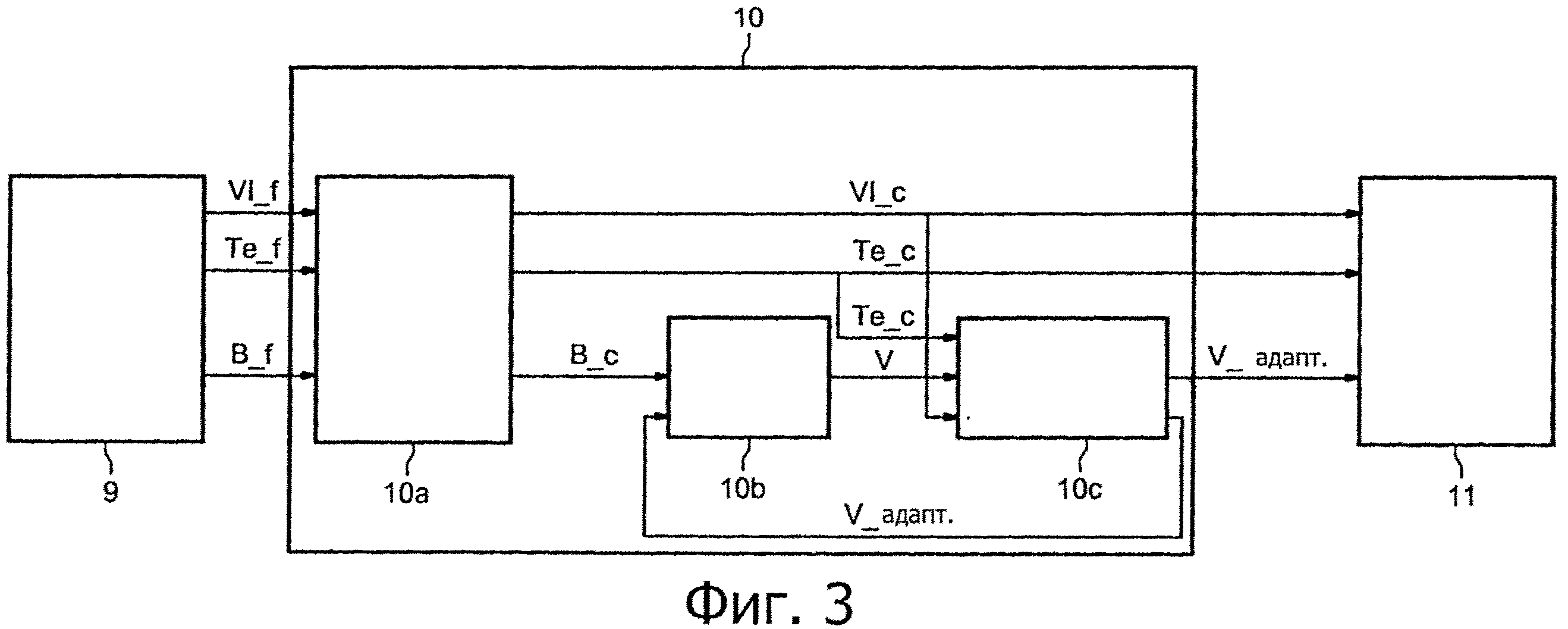
на фиг.3 показана схема блока, предназначенного для адаптации намерения водителя при помощи устройства, изображенного на фиг.2;
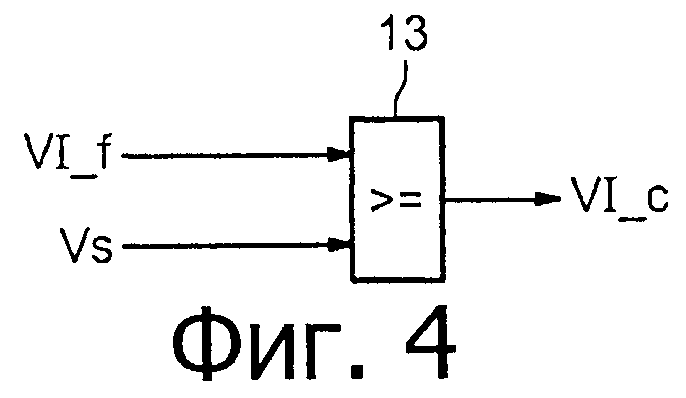
на фиг.4 показана схема блока кодирования скорости транспортного средства;
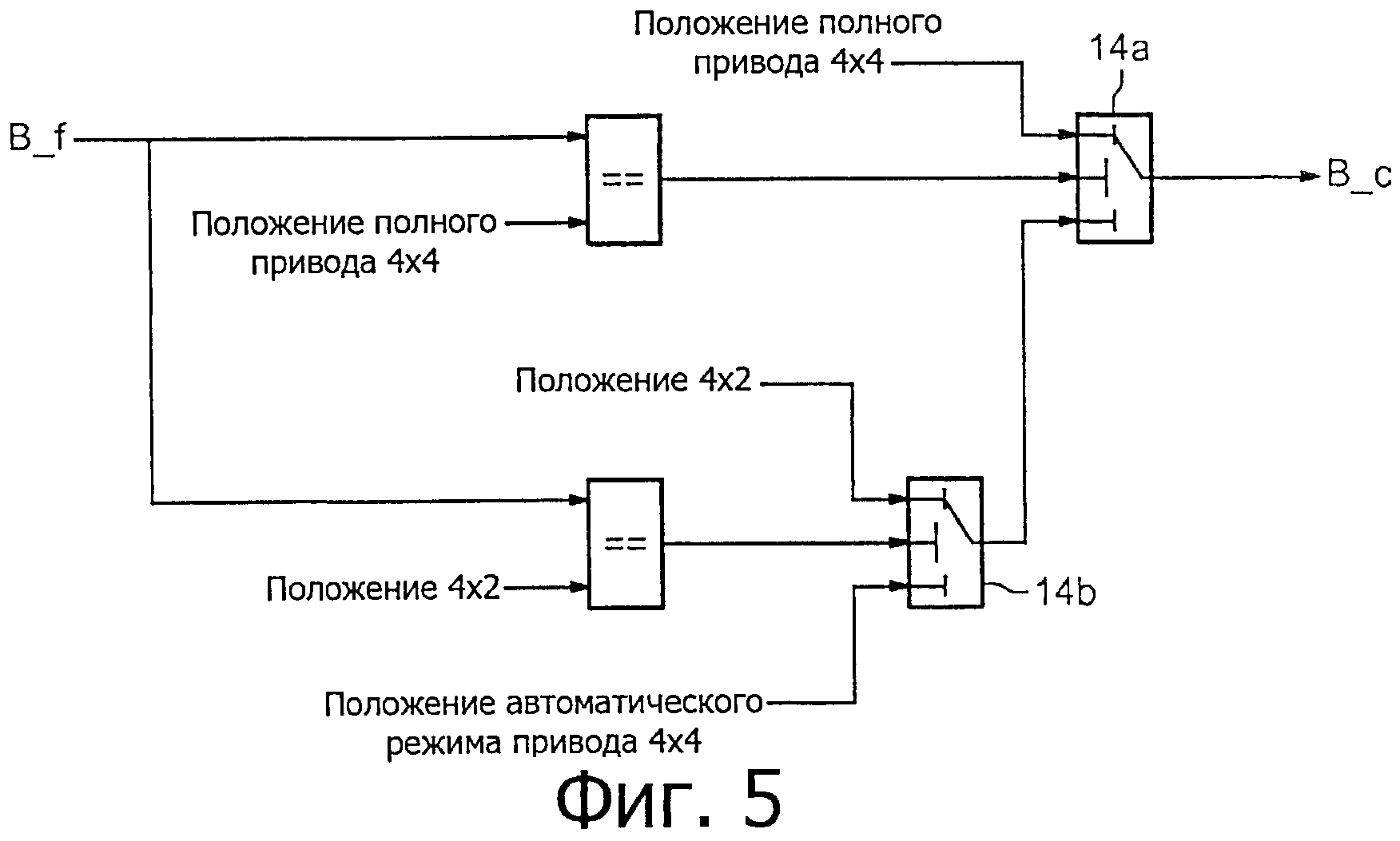
на фиг.5 показана схема блока кодирования выбранного режима привода;
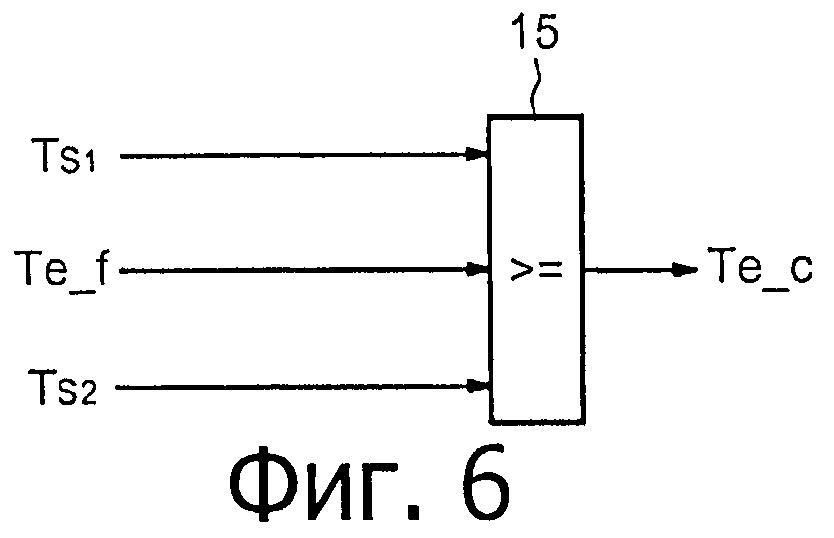
на фиг.6 показана схема блока кодирования температуры;
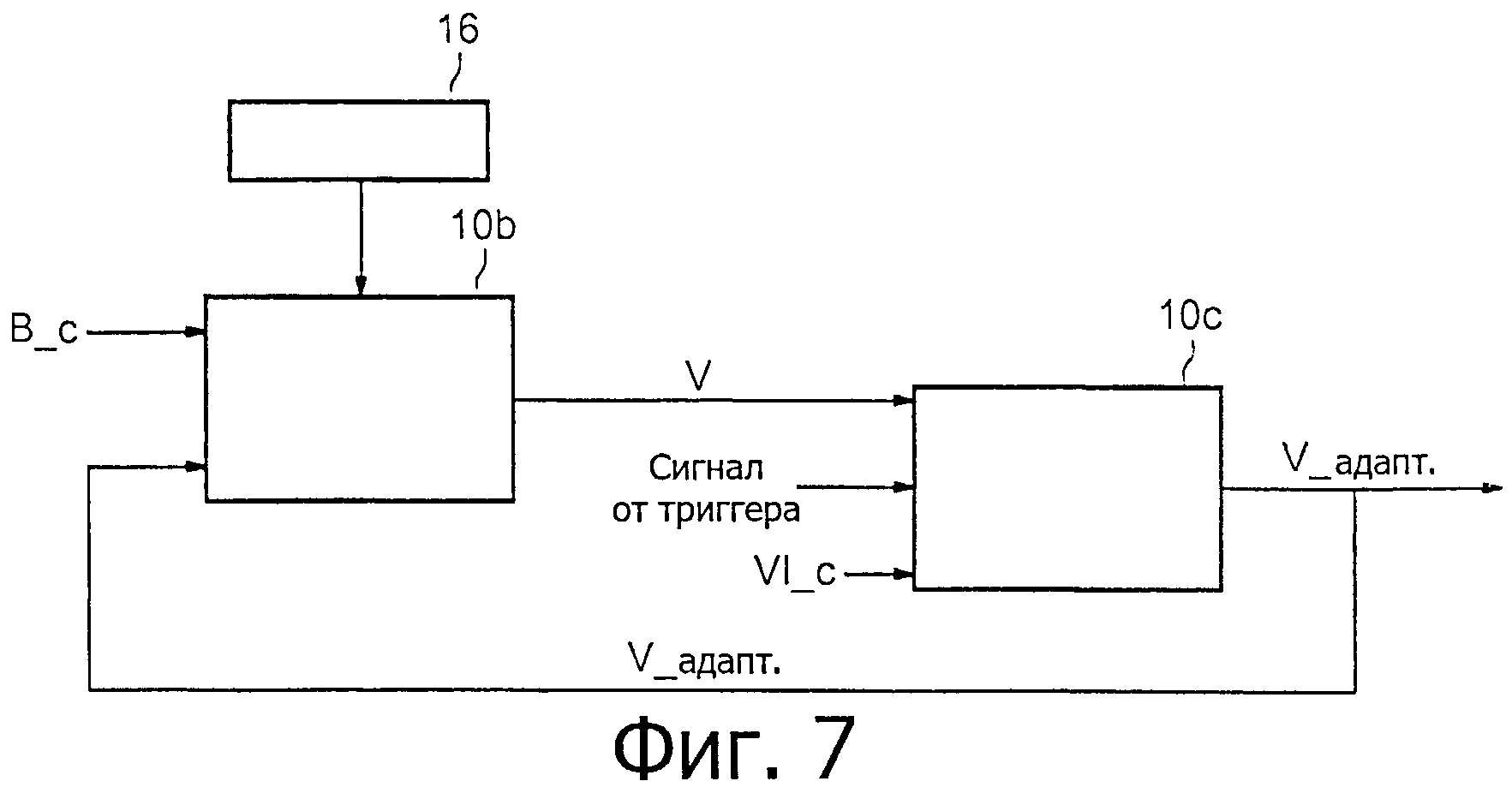
на фиг.7 показана схема протокола, позволяющего адаптировать задаваемый водителем режим привода к работе транспортного средства;
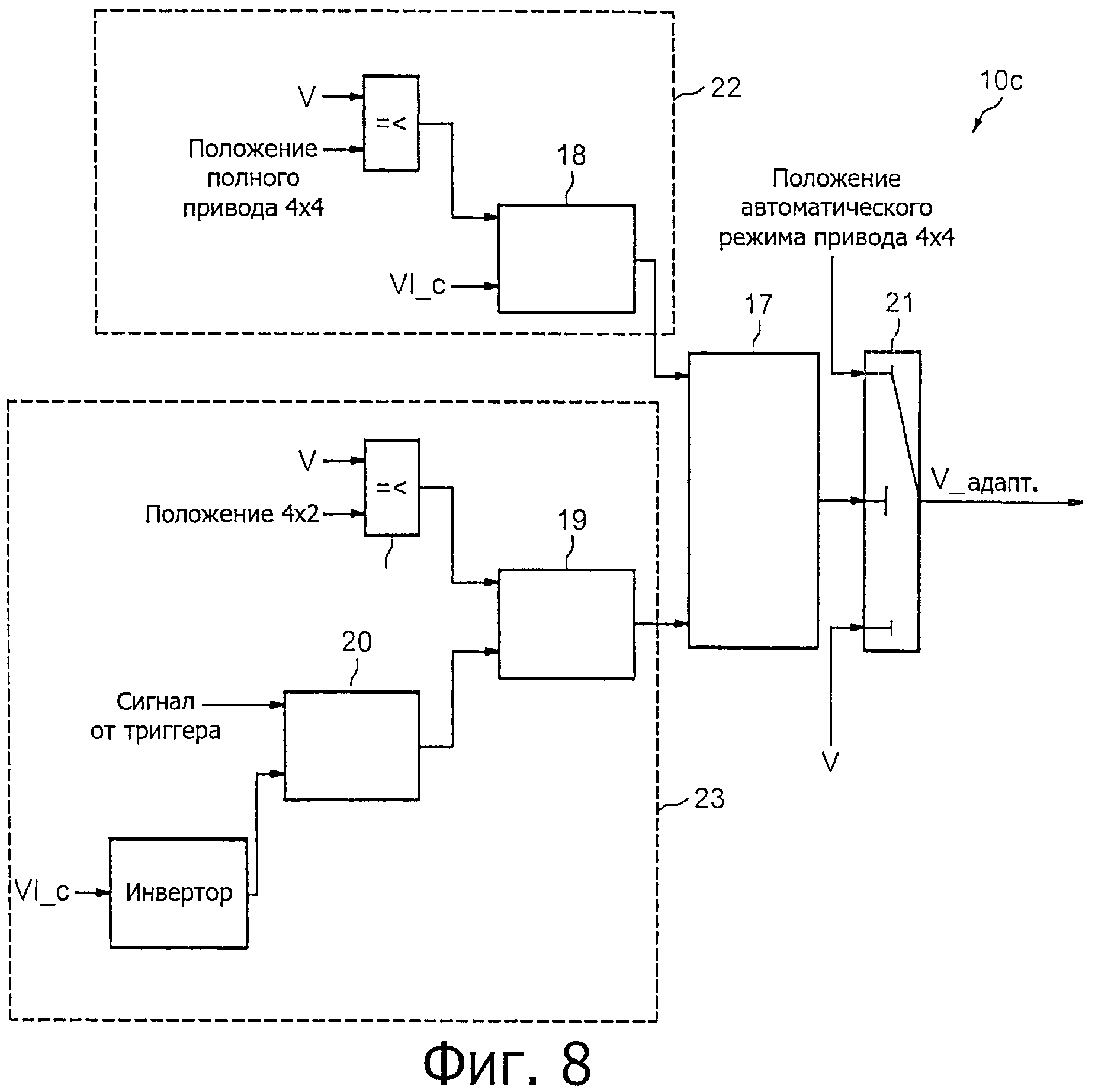
на фиг.8 показана диаграмма логики, позволяющей интерпретировать намерение водителя.
На фиг.1 показана общая архитектура устройства выбора режима привода в соответствии с настоящим изобретением, обозначенного общей цифровой позицией 1.
Это устройство предназначено для использования в автотранспортном средстве с четырьмя ведущими колесами, имеющем несколько режимов привода, таких как указанные выше режимы «4×4 полного привода», «4×4 автоматический» и «4×2».
В частности, оно предназначено для обеспечения выбора водителем режима привода. Кроме того, оно предназначено для управления приводом транспортного средства с учетом режима привода, выбранного водителем, а также условий движения транспортного средства.
Например, речь идет об исключении режимов привода, не совместимых с условиями движения транспортного средства.
Так, например, как будет подробно описано ниже, в случае, когда транспортное средство движется на высокой скорости и водитель выбрал режим «4×4 полного привода», что может привести к перегреву и даже к поломке сцепления по причине несовместимости работы на высокой скорости, устройство 1 может поменять выбор, сделанный водителем на режим, менее агрессивный для сцепления и, в первую очередь, отличающийся меньшим расходом топлива.
Для этого, как показано на чертеже, устройство 1 содержит селектор 2 режима привода, например, типа кнопки, управляемой водителем, первый электронный блок управления UCE 3, сеть связи 4, например, шину данных типа CAN, датчики 5а скорости, средства 5b определения температуры муфты трансмиссии транспортного средства, второй электронный блок управления UCE 6 и интерфейсные средства 7, образующие интерфейс человек-машина.
Эти различные элементы взаимосвязаны между собой.
В частности, как показано, селектор 2 связан с электронным блоком 3 управления. Интерфейс 7 человек-машина связан со вторым электронным блоком 6 управления.
Оба электронных блока 3 и 6 управления, а также датчик 5а скорости и средства 5b определения температуры муфты связаны с шиной сети 4 связи.
Показанное на фиг.1 устройство 1 позволяет, за счет считывания и обработки входных сигналов, таких как скорость транспортного средства, температура муфты и положение селектора 2, показывающее задаваемый водителем режим привода, задавать режим привода, соответствующий условиям работы транспортного средства, с учетом намерения водителя.
В возможном примере осуществления используемый селектор 2 является, по меньшей мере, двухпозиционным селектором и может, например, соответствовать двухимпульсному селектору с одним устойчивым состоянием, одноимпульсному селектору с двумя устойчивыми состояниями или селектору с тремя устойчивыми состояниями.
Не выходя за рамки изобретения, для выбора режима привода можно также использовать средство распознавания голоса или любое другое средство, позволяющее выбирать режим привода.
На фиг.2 показана работа устройства, изображенного на фиг.1, и, в частности, обработка различных входных сигналов, применяемая в электронных блоках управления. Как показано на фигуре, для считывания сигналов и их воспроизведения на интерфейсе человек-машина используют три блока 9, 10 и 11, размещенных внутри электронных блоков 3 и 6 управления.
Первый блок 9 принимает на входе сигналы, выдаваемые датчиками скорости 5а, средствами 5b, а также сигнал, характеризующий положение селектора 2.
Так, на входе он получает значение VI_b скорости транспортного средства, температуру Те_b муфты и выбор В_b режимов привода.
Следует отметить, что скорость транспортного средства получают, например, используя датчики и вычисляя среднее значение скоростей передних колес. Его можно кодировать, чтобы получить преобразование в скоростной диапазон в зависимости от функциональных порогов режимов привода транспортного средства.
Что касается температуры муфты, ее можно, например, измерить и отфильтровать в рабочем диапазоне датчика. Вместе с тем, в варианте ее можно получить посредством оценки. В этом последнем случае оценку температуры муфты можно произвести на основании разности проскальзывания переднего и заднего мостов и прикладываемого крутящего момента. Оценку повышения температуры сцепления можно при этом произвести на сновании поглощения энергии, связанной с трением дисков муфты. Разность скорости на входе и на выходе муфты и прикладываемый момент характеризуют коэффициент увеличения тепловой энергии. Что касается охлаждения, то его оценку можно произвести на основании способности удаления или высвобождения тепловой энергии различных элементов, входящих в состав муфты.
Наконец, выбор режима привода можно направить в средство 9 фильтрации в виде импульсов или постоянного сигнала.
Блок 9 фильтрации позволяет фильтровать и производить цифровую обработку необработанных сигналов VI_b, Te_b и B_b и выдавать соответствующие выходные фильтрованные сигналы, а именно: фильтрованную скорость VI_f транспортного средства, фильтрованную температуру Te_f муфты и фильтрованный сигнал выбора B_f.
В частности, сигнал выбора В_b фильтруют таким образом, чтобы устройство 1 воспринимало его именно как следствие воздействия водителя на детектор 2. Устройство 1 считает, что это происходит, когда нажатие длится ни слишком мало, ни слишком долго. В данном случае слишком короткое нажатие рассматривается устройством 1, например, как результат плохого контакта. Слишком долгое нажатие считается результатом заедания селектора.
Сигналы, характеризующие условия движения транспортного средства, можно точно так же фильтровать, чтобы обеспечивать качество считываемых данных, например, чтобы они соответствовали рабочему диапазону датчиков.
Второй блок 10 предназначен для определения и выдачи режима привода на основании фильтрованной скорости VI_f транспортного средства, фильтрованной температуры Te_f муфты и фильтрованного сигнала выбора B_f. Иначе говоря, этот режим привода соответствует адаптированной переменной величине V, характеризующей намерение водителя, выбираемой при помощи селектора 2, чтобы учитывать условия вождения.
Он выдает также кодированные значения скорости VI_c транспортного средства и температуры Те_c муфты.
Второй блок 10 позволяет устройству 1 определить режим привода транспортного средства в зависимости от условий работы транспортного средства, по возможности, адаптированный к намерению V водителя.
Так, этот второй блок 10 позволяет адаптировать намерение водителя, выражаемое приведением в действие селектора 2, и, в случае необходимости, изменить выбранный режим на основании фильтрованных значений скорости транспортного средства и температуры муфты.
Третий блок 11 принимает на входе кодированные сигналы от второго блока 10, а именно скорость VI_c транспортного средства, температуру Те_c муфты и новый адаптированный режим привода V_адапт. На выходе он выдает сигнал информации Lc в направлении средства сигнализации, чтобы сообщить водителю режим привода, выбранный устройством 1.
На фиг.3 показана архитектура второго блока 10 интерпретации намерения водителя. Как показано на фигуре, этот блок содержит три каскада 10а, 10b и 10с.
Первый каскад 10а является средством кодирования входных фильтрованных сигналов скорости VI_f транспортного средства, температуры Te_f муфты и сигнала выбора B_f. В частности, он предназначен для формирования кодированных сигналов в виде диапазонов значений, позволяющих интерпретировать их при помощи матриц или картографии, облегчая, таким образом, их дальнейшую обработку. На выходе он выдает выходные кодированные сигналы VI_c, Te_c, В_c. Выходные кодированные сигналы VI_c и Те_c направляются в третий каскад 10 с и в третий блок 11.
На входе второй каскад 10b принимает сигнал выбора В_c и определяет намерение V водителя, касающееся режима привода. Иначе говоря, речь идет о применении фильтрации, позволяющей определить положение селектора 2, в частности, при работе селектора в виде последовательных импульсов.
На входе третий каскад 10 с принимает сигналы VI_c, Te_c и намерение V водителя и выдает на выходе новый режим привода V_адапт., то есть режим, измененный устройством 1. Этот каскад соответствует средству анализа намерения V водителя в зависимости от значения переменных VI_c и Те_c, выражающих условия работы транспортного средства.
Далее со ссылками на фиг.4 представлен протокол кодирования скорости.
Переменное значение скорости VI, выраженное в км/час, сравнивают с пороговым значением скорости Vs. Это пороговое значение скорости Vs выбирают таким образом, чтобы оно соответствовало условиям работы транспортного средства, при превышении которых муфта начинает перегреваться. Например, если скорость VI меньше или равна (или соответственно больше или равна) пороговому значению скорости Vs, компаратор 13 выдает для скорости VI сигнал, равный нулю (соответственно отличный от нуля, например, равный 1).
На фиг.5 схематично показан блок кодирования режима привода транспортного средства.
Этот блок принимает на входе фильтрованный сигнал селектора B_f и на выходе выдает кодированный сигнал селектора В_c. Если положение селектора B_f соответствует режиму 4×4 полного привода, первое средство выбора 14а присваивает выходное значение режима 4×4 полного привода кодированному сигналу селектора В_c, например, сигнал равен 0.
Если это не так и если положение селектора B_f соответствует режиму привода 4×2, второе средство выбора 14b присваивает выходное значение режима привода 4×2 кодированному сигналу селектора В_c, например, сигнал равен 2.
Если положение селектора B_f не соответствует ни режиму 4×4 полного привода, ни режиму привода 4×2, следовательно, положение селектора B_f соответствует автоматическому режиму привода 4×4, и второе средство выбора 14b присваивает выходное значение автоматического режима привода 4×4 кодированному сигналу селектора В_c, например, сигнал равен 1.
На фиг.6 показана схема кодирования температуры.
Переменное значение температуры, выраженное в градусах Цельсия, сравнивают с двумя пороговыми значениями температуры Ts1 и Ts2. Если оно ниже Ts, то компаратор 15 выдает на выходе сигнал, равный нулю. Если оно находится в пределах между Ts1 и Ts2, компаратор выдает на выходе сигнал температуры, равный 1. Если оно превышает Ts2, компаратор выдает на выходе сигнал температуры, равный 2. Нижнее пороговое значение температуры Ts1 соответствует среднему уровню нагрева, допустимому для муфты, а верхнее пороговое значение температуры Ts2 соответствует чрезмерному уровню нагрева.
На фиг.7 показаны каскады 10b и 10с, которые позволяют изменить или адаптировать намерение V водителя с точки зрения выбора привода.
Второй каскад 10b активируют или делают функциональным при помощи триггера 16, и он выдает на выходе при помощи матрицы или картографии параметр V, соответствующий намерению V водителя. Триггер 16 активирует матрицу, как только он обнаруживает новый сигнал кнопки В_c.
Третий каскад 10 с принимает на входе параметр V, кодированный сигнал скорости транспортного средства VI_c, сигнал от триггера 16 и выдает на выходе режим привода V_адапт., адаптированный к условиям работы транспортного средства, и, если эти условия позволяют, к намерению V водителя. Он работает непрерывно и независимо от активации или отсутствия активации второго каскада 10b. Даже если он принимает на выходе сигнал от триггера 16, указывающий на запрос изменения режима привода со стороны водителя, его работа остается непрерывной и не зависит от сигнала триггера 16.
Если условия работы транспортного средства меняются, и водитель не нажимает на селектор 2 для изменения режима привода, второй каскад 10b не активируется. Поскольку третий каскад 10 с работает непрерывно, он обнаруживает изменение характеристических значений, связанных с работой транспортного средства, таких как скорость VI транспортного средства или температура Те муфты, и проверяет, не превышают ли эти значения заданное пороговое значение. После этого он рассматривает намерение V водителя, которое в этом случае не изменилось и соответствует намерению водителя, сохраненному в памяти третьего каскада 10с.
Если это намерение V водителя не совместимо с новыми условиями работы, третий каскад 10 с изменяет режим привода V_адапт. и направляет его в средство 11 визуализации и в средство 10b передачи. Например, эти рабочие условия могут соответствовать ситуации, в которой активированный режим привода является режимом 4×4 полного привода, при котором скорость транспортного средства меняется от малой скорости до высокой скорости вследствие ускорения и при котором транспортное средство начинает двигаться по другому участку местности.
Если водитель нажимает на селектор 2, чтобы задать новый режим привода транспортного средства, триггер 16 активирует второй каскад 10b.
Поскольку третий каскад 10 с работает непрерывно, он обнаруживает новое намерение V водителя. Затем он анализирует значения переменных величин, связанных с работой, таких как скорость VI транспортного средства или температура Те муфты, например, проверяет, не превышают ли значения скорости VI транспортного средства или температуры Те муфты заданное пороговое значение. После этого он анализирует адекватность между этими значениями и намерением V водителя.
В случае адекватности между значением этих переменных и намерением V водителя, меняется новый режим привода V_адапт., который соответствует этому новому намерению V водителя. В этом случае новый режим привода вводится в блок для выведения на дисплей и вводится во второй каскад 10b, который повторно инициализирует режим привода V_адапт.
В случае неадекватности между переменными работы транспортного средства и намерением V водителя, новый режим привода V_адапт. не соответствует намерению водителя и изменяется на режим, допустимый для работы транспортного средства. После этого он направляется в средство 11 визуализации и в средство 10b передачи.
На фиг.8 схематично показана диаграмма логики, применяемой в третьем каскаде. Эта диаграмма основана на использовании намерения V водителя и предназначена для выработки на выходе нового режима привода V_адапт.
Как показано на фигуре, третий каскад 10 с содержит триггерную схему 17, три логических оператора 18, 19, 20 и средство 21 выбора.
Триггерная схема 17 содержит двоичный выход и позволяет блокировать работу первого блока 8, выдавая сигнал со значением 1, выжидая, пока будут соблюдены условия второго блока 9.
Если на уровне логического оператора 18 соблюдены условия входного блока 22, то есть условия высокой скорости и намерение V водителя, соответствующие режиму 4×4 полного привода, триггерная схема 17 выдает сигнал со значением 1, и средство 21 выбора переключает новый режим привода V_адапт. на режим привода, отличный от режима 4×4 полного привода, например, на автоматический режим 4×4. Необходимо отметить, что намерение V водителя является значением, сохраняемым в памяти в третьем каскаде 10с, и соответствует либо новому намерению водителя, поступающему от селектора 2, либо прежнему намерению водителя. Таким образом, устройство 1 обнаруживает несоответствие на уровне первого логического оператора 18, отклоняет новое намерение водителя поменять режим привода и принимает решение о выборе режима привода по умолчанию, более адаптированного к работе транспортного средства, при помощи средства 21 выбора, в данном случае о выборе автоматического режима 4×4.
Если на уровне второго и третьего логических операторов 19 и 20 соблюдены условия выходного блока 23, которые в данном случае позволяют принять режим привода 4×2 и которые касаются условий низкой скорости, триггерная схема 17 выдает сигнал со значением 0, и средство 21 выбора сообщает намерение V водителя новому режиму привода V_адапт.
Используемой характеристической переменной в данном случае является скорость транспортного средства, однако в устройстве 1 можно использовать любую переменную величину, характеризующую условия работы и окружающей среды транспортного средства, например, температуру муфты, чтобы определить адекватность этой переменной с режимом привода, запрошенным водителем, среди всех возможных режимов привода транспортного средства.
Таким образом, новый режим привода V_адапт. соответствует новому намерению V водителя, если оно соответствует условиям работы транспортного средства, и, в противном случае, режиму привода по умолчанию, допустимому для работы транспортного средства.
Таким образом, устройство 1 изменяет запрос или выбор нового режима привода, осуществляемый водителем, если оно считает, что этот режим не соответствует условиям работы транспортного средства.
Оно выдает также в интерфейс человек-машина информацию, связанную с измененным или адаптированным режимом привода.
Способ обработки сигнала, поступающего от датчика положения органа управления автотранспортного средства
Способ обработки данных в устройстве обеспечения маневрирования на склоне автотранспортного средства
Устройство обеспечения маневрирования на склоне для транспортного средства
Способ обеспечения контроля для транспортного средства
Способ и система диагностики рабочего состояния режима помощи при трогании с места автотранспортного средства
Способ и система диагностики рабочего состояния системы помощи при трогании с места автотранспортного средства
Способ управления разностью скорости между передними и задними колесами транспортного средства с четырьмя ведущими колесами
Способ и устройство распределения крутящего момента между передним мостом и задним мостом автотранспортного средства, оснащенного четырьмя ведущими колесами
Способ обеспечения работы системы трансмиссии автотранспортного средства
Способ управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства
Способ обработки сигнала, поступающего от датчика положения органа управления автотранспортного средства
Способ обработки данных в устройстве обеспечения маневрирования на склоне автотранспортного средства
Устройство обеспечения маневрирования на склоне для транспортного средства
Способ обеспечения контроля для транспортного средства
Способ и система диагностики рабочего состояния режима помощи при трогании с места автотранспортного средства
Способ и система диагностики рабочего состояния системы помощи при трогании с места автотранспортного средства
Способ управления разностью скорости между передними и задними колесами транспортного средства с четырьмя ведущими колесами
Способ и устройство распределения крутящего момента между передним мостом и задним мостом автотранспортного средства, оснащенного четырьмя ведущими колесами
Способ обеспечения работы системы трансмиссии автотранспортного средства
Способ управления устройством распределения крутящего момента между передней и задней колесными осями транспортного средства

