Результат интеллектуальной деятельности: ПРОМЕЖУТОЧНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА И СПОСОБ УПРАВЛЕНИЯ ИМ
Вид РИД
Изобретение
Изобретение относится к машиностроению, а именно к приводам ленточных конвейеров.
Известны ленточные конвейеры с промежуточными приводами, имеющими повышенное скольжение за счет применения турбомуфт или включения дополнительного сопротивления в цепь ротора асинхронного электродвигателя [1].
Повышенное скольжение обеспечивает более равномерное распределение нагрузки между приводами, но приводит к увеличению потерь электроэнергии. Кроме того, в таких приводах скорости движения приводных лент не согласуются со скоростью движения грузонесущей ленты, что приводит к повышенному износу лент.
Известен промежуточный привод ленточного конвейера, содержащий расположенную под грузонесущей ветвью конвейерной ленты замкнутую на приводном и натяжном барабанах приводную ленту, верхняя ветвь которой размещена под грузонесущей ветвью конвейерной ленты и опирается на ее роликоопоры, а нижняя ветвь с помощью прижимных роликов прижата к холостой ветви конвейерной ленты [2].
Недостатком этого привода является невозможность согласования скоростей движения приводной и конвейерной лент, приводящая к повышенному скольжению и повышенному износу приводной и конвейерной лент. Кроме того, возможны режимы работы такого привода, когда либо одна из ветвей приводной ленты, либо обе будут тормозить конвейерную ленту.
Известен способ управления промежуточным приводом ленточного конвейера, заключающийся в изменении скорости вращения приводного барабана согласно заданному режиму работы ленточного конвейера [3].
Недостатком этого способа управления является несогласованность скоростей движения приводной и конвейерной лент, приводящая к повышенному скольжению и повышенному износу приводной и конвейерной лент.
Задачей предлагаемого изобретения является повышение эффективности промежуточного привода ленточного конвейера.
Промежуточный привод ленточного конвейера включает расположенную под грузонесущей лентой и контактирующую с ней замкнутую приводную ленту, опирающуюся на роликоопоры и охватывающую приводной и натяжной барабаны, электропривод приводного барабана, блок управления электроприводом.
Согласно изобретению промежуточный привод ленточного конвейера снабжен датчиками скорости грузонесущей и приводной лент, установленными в месте соприкосновения грузонесущей и приводной лент или перед местом соприкосновения грузонесущей и приводной лент.
Датчик скорости грузонесущей ленты установлен на роликоопоре перед местом соприкосновения грузонесущей и приводной лент.
Датчик скорости приводной ленты установлен на роликоопоре в месте соприкосновения грузонесущей и приводной лент или на натяжном барабане.
Способ управления промежуточным приводом ленточного конвейера включает изменение скорости приводной ленты согласно заданному режиму работы ленточного конвейера, обеспечивающему ускорение грузонесущей ленты, движение грузонесущей ленты с постоянной скоростью, замедление грузонесущей ленты, неподвижное состояние грузонесущей ленты.
Согласно изобретению в режимах ускорения грузонесущей ленты и движения грузонесущей ленты с постоянной скоростью скорость приводной ленты VП в месте соприкосновения с грузонесущей лентой изменяют в пределах
VГ<VП≤VГ+Δ,
где VГ - скорость грузонесущей ленты в месте соприкосновения с приводной лентой или перед ним, Δ - допустимая скорость проскальзывания приводной ленты относительно грузонесущей ленты, в режиме замедления грузонесущей ленты скорость приводной ленты в месте соприкосновения с грузонесущей лентой изменяют в пределах
VГ-Δ≤VП<VГ.
При осуществлении изобретения может быть получен технический результат, заключающийся в повышении эффективности промежуточного привода ленточного конвейера.
Указанный технический результат достигается тем, что уменьшаются потери электроэнергии и износ приводной и конвейерной лент. Кроме того, повышается надежность работы привода за счет исключения возможности непредусмотренного торможения грузонесущей ленты.
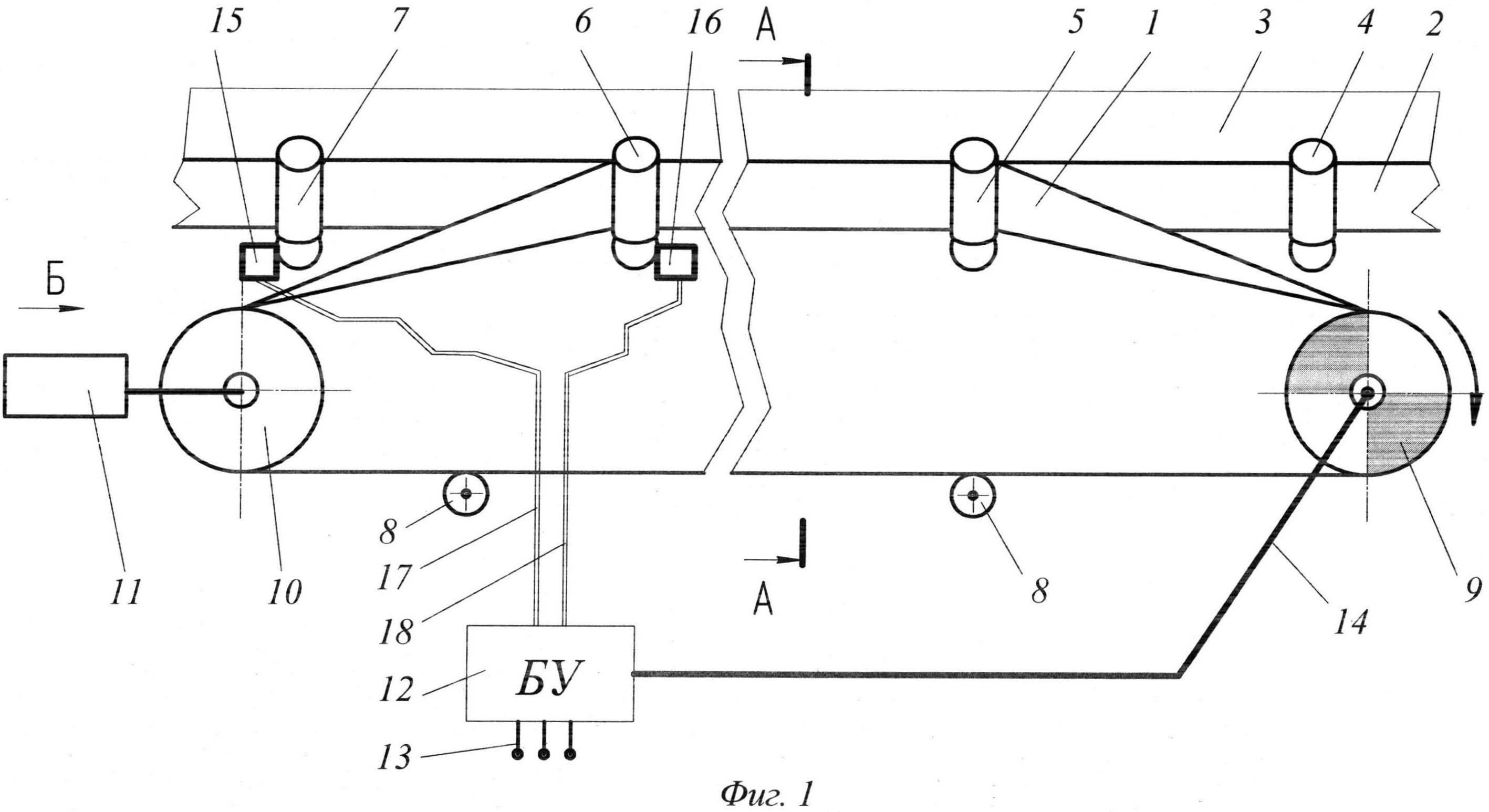
На фиг.1 изображена схема промежуточного привода ленточного конвейера;
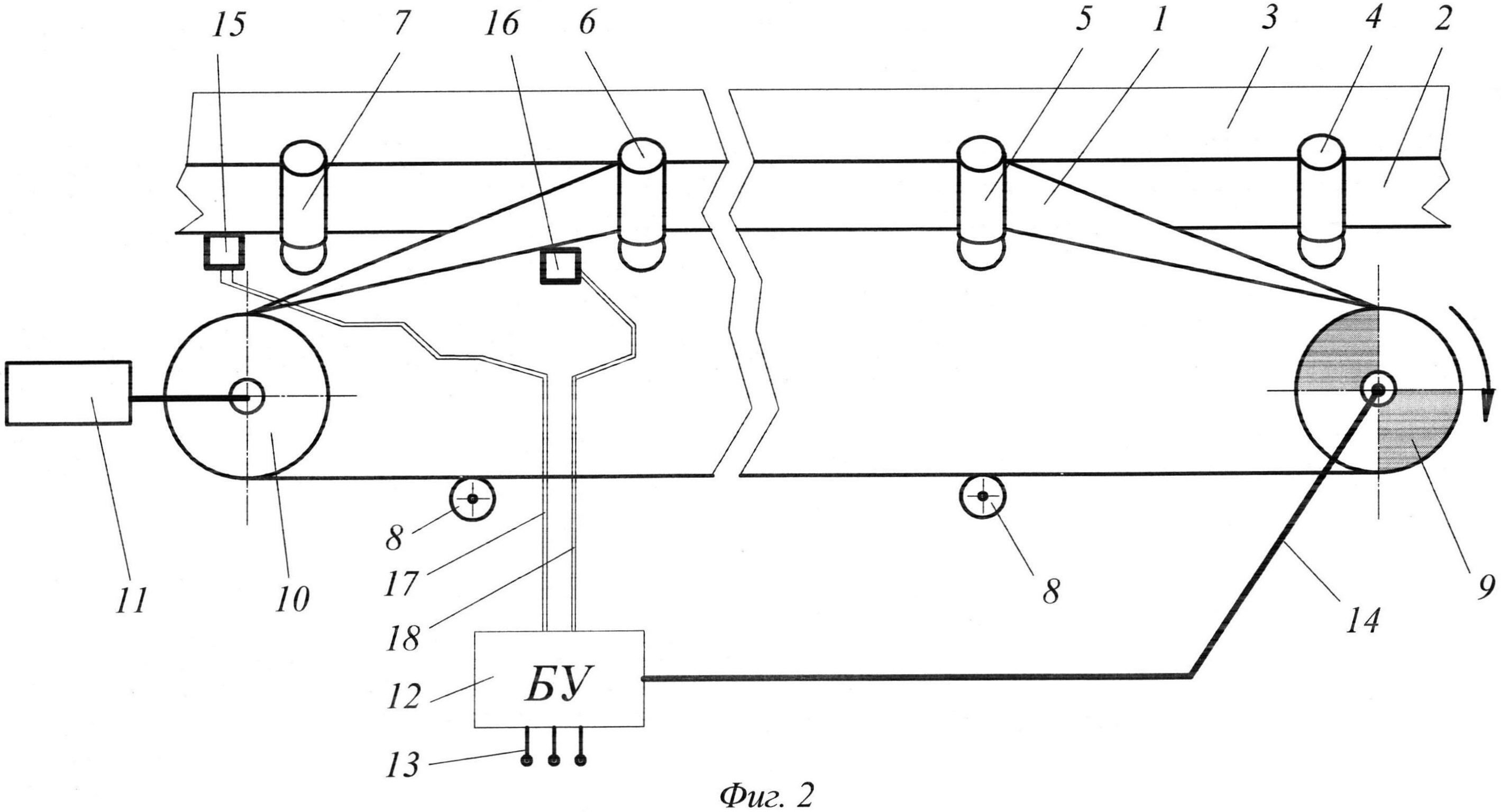
на фиг.2 - схема промежуточного привода ленточного конвейера с датчиками скоростей, установленными перед местом соприкосновения грузонесущей и приводной лент;
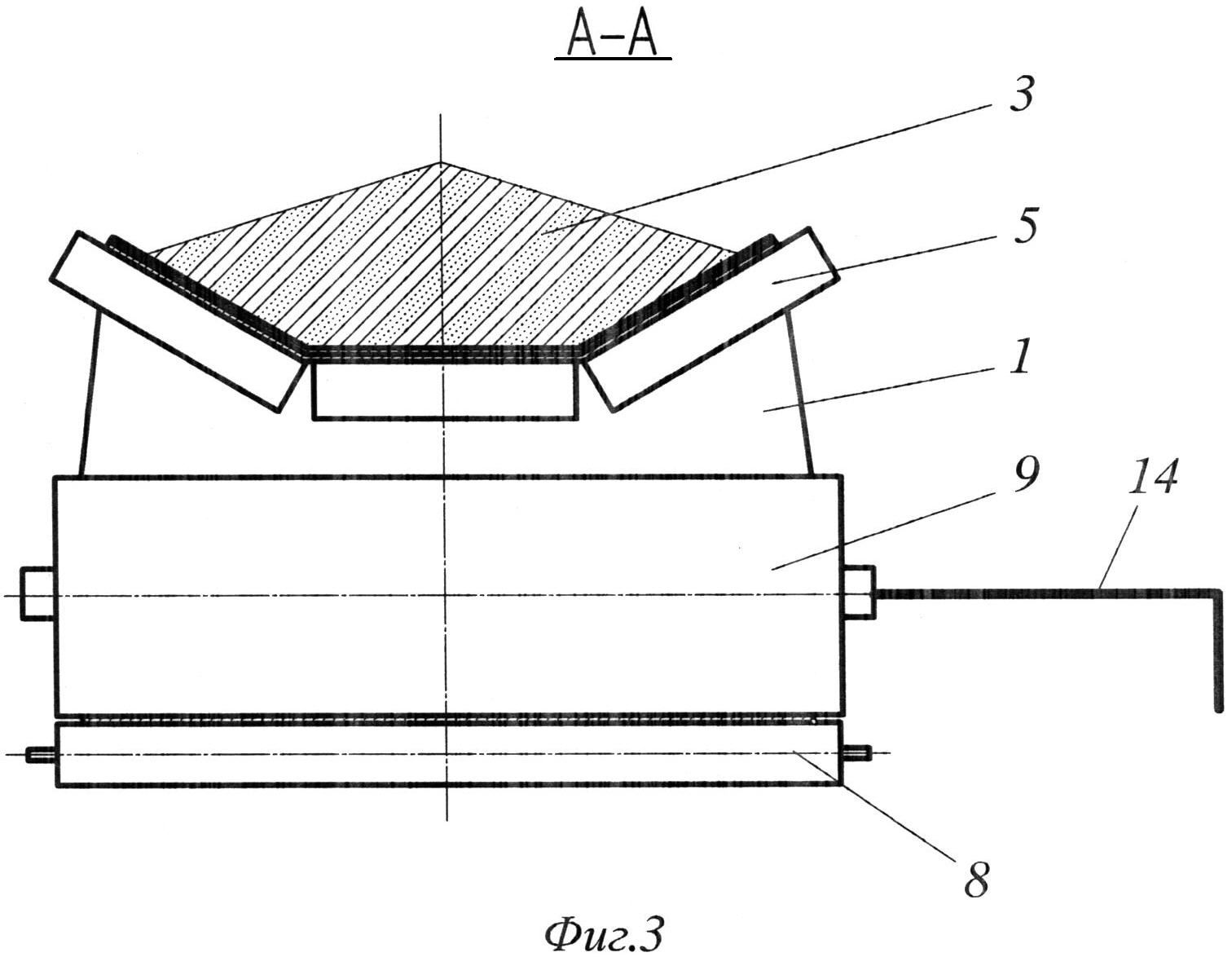
на фиг.3 изображено сечение А-А на фиг.1;
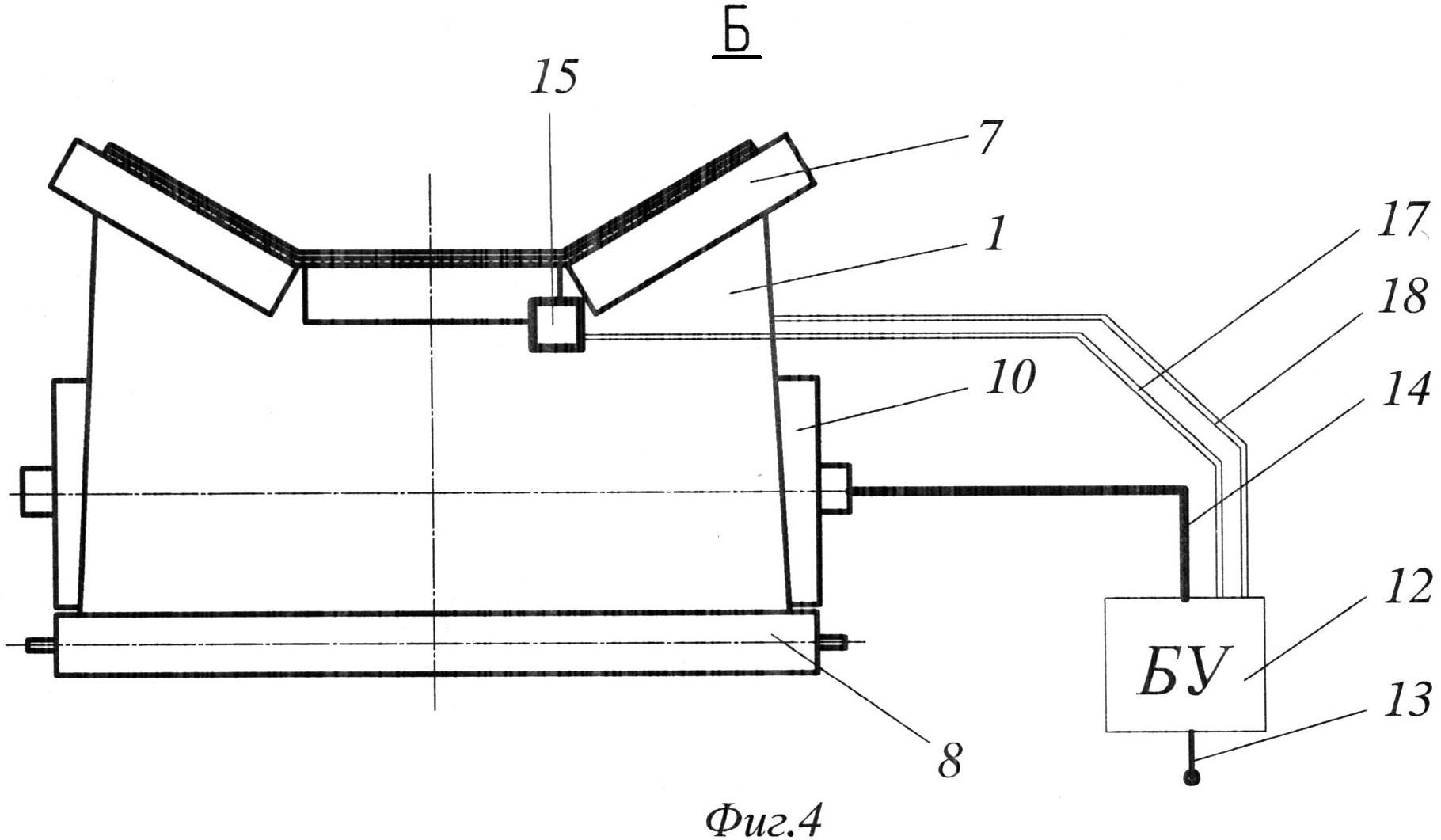
на фиг.4 - вид Б на фиг.1 (транспортируемый груз и натяжное устройство условно не показаны).
Промежуточный привод ленточного конвейера включает замкнутую приводную ленту 1, расположенную под грузонесущей лентой 2 с транспортируемым грузом 3 и контактирующую с ней. Грузонесущая лента 2 опирается на роликоопоры 4, 5, 6, 7. Приводная лента 1 опирается на роликоопоры 5, 6, 8 и охватывает приводной 9 и натяжной 10 барабаны. Натяжной барабан 10 перемещается натяжным устройством 11, например винтовым, и натягивает приводную ленту 1. Приводной барабан 9 соединен с электроприводом (не показан), например, встроенным внутри приводного барабана 9.
Блок управления 12 соединен с линией 13 подвода электроэнергии, а также соединен кабелем 14 с электроприводом.
Промежуточный привод ленточного конвейера снабжен датчиком 15 скорости грузонесущей ленты 2 и датчиком 16 скорости приводной ленты 1.
Датчик 15 установлен на роликоопоре 7 перед местом соприкосновения грузонесущей 2 и приводной 1 лент. Датчик 16 установлен на роликоопоре 6 в месте соприкосновения грузонесущей 2 и приводной 1 лент. Датчики 15 и 16 подключены к блоку управления 12 кабелями 17 и 18. Возможна установка датчика 16 на натяжном барабане 10 (не показано).
Также возможна установка датчиков 15 и 16 перед местом соприкосновения грузонесущей 2 и приводной 1 лент (фиг.2). При этом датчики 15 и 16 замеряют скорости грузонесущей ленты 2 и приводной ленты 1 контактным или бесконтактным способом.
Промежуточный линейный привод ленточного конвейера работает следующим образом.
Электроэнергия из линии 13 через блок управления 12 по кабелю 14 поступает к электроприводу, приводящему во вращение приводной барабан 9. Сигналы датчиков 15 и 16 по кабелям 17 и 18 поступают в блок управления 12.
При вращении приводного барабана 9 тяговое усилие от приводной ленты 2 за счет сил трения передается грузонесущей ленте 1 на участке их контакта между роликоопорами 6 и 5.
Натяжение приводной ленты 2 осуществляют перемещением натяжного барабана 10 посредством натяжного устройства 11.
При вращении приводного барабана 9 по часовой стрелке (направление вращения указано стрелкой на фиг.1, фиг.2) движущаяся грузонесущая лента 2 входит в соприкосновение с приводной лентой 1 над роликоопорой 6 и выходит из соприкосновения над роликоопорой 5. Таким образом, место соприкосновения грузонесущей ленты 2 с приводной лентой 1 находится над роликоопорой 6.
Приводная лента 1 за счет сил трения на поверхности контакта передает силу тяги грузонесущей ленте 2. При этом натяжение приводной ленты 1 увеличивается по длине контакта (по направлению от роликоопоры 6 к роликоопоре 5), а натяжение грузонесущей ленты 2 уменьшается по длине контакта (по направлению от роликоопоры 6 к роликоопоре 5). Скорость любого сечения приводной ленты 1 пропорциональна величине натяжения в данном сечении, поэтому скорость приводной ленты 1 на роликоопоре 6 (VП6) меньше, чем на роликоопоре 5 (VП5). Аналогично скорость грузонесущей ленты 2 на роликоопоре 6 (VГ6) больше, чем на роликоопоре 5 (VГ5).
Скорость скольжения приводной ленты 1 относительно грузонесущей ленты 2 на роликоопоре 6 (VС6) определяется формулой
VС6=VП6-VГ6.
Аналогично скорость скольжения приводной ленты 1 относительно грузонесущей ленты 2 на роликоопоре 5 (VС5) определяется формулой
VС5=VП5-VГ5.
Поскольку VП5>VП6, a VГ5<VГ6, то VС5>VС6, то есть скорость скольжения приводной ленты 1 относительно грузонесущей ленты 2 возрастает вдоль длины контакта от места соприкосновения на роликоопоре 6 до места разделения на роликоопоре 5.
Если VП6>VГ6, то силы трения направлены так, что приводная лента 1 тянет грузонесущую ленту 2.
Если VП6<VГ6, то силы трения направлены так, что приводная лента 1 тормозит грузонесущую ленту 2.
Датчики 15 и 16 по кабелям 17 и 18 передают в блок управления 12 значения скоростей грузонесущей ленты 2 и приводной ленты 1 перед местом их соприкосновения. Блок управления 12 в соответствии с заданным режимом работы ленточного конвейера формирует управляющий сигнал и передает его по кабелю 14 электроприводу, приводящему во вращение приводной барабан 9 с требуемой скоростью вращения. Например, в режиме тяги блок управления 12 обеспечивает VП6>VГ6, в режиме торможения - VП6<VГ6.
Способ управления промежуточным приводом ленточного конвейера реализуют следующим образом.
Для движения грузонесущей ленты 2 согласно заданному режиму работы ленточного конвейера (ускорение, движение с постоянной скоростью, замедление) электропривод вращает приводной барабан 9 с требуемым ускорением, скоростью. Для сохранения неподвижного состояния грузонесущей ленты 2 электропривод удерживает приводной барабан 9 в неподвижном состоянии с помощью тормоза (не показан).
Для ускорения грузонесущей ленты 2 или поддержания движения грузонесущей ленты 2 с постоянной скоростью приводная лента 1 работает в тяговом режиме. При этом блок управления 12 передает электроприводу управляющий сигнал, обеспечивающий небольшое превышение скорости приводной ленты 1 на роликоопоре 6 по отношению к скорости грузонесущей ленты 2 на роликоопоре 6 VП6>VГ6.
Для снижения износа скорость проскальзывания приводной ленты 1 относительно грузонесущей ленты 2 не должна превышать допустимой величины Δ. Поэтому блок управления 12 на основании сигналов датчиков 15 и 16 формирует и передает электроприводу по кабелю 14 управляющий сигнал, обеспечивающий движение приводной ленты 1 со скоростью в пределах
VГ6<VП6≤VГ6+Δ.
Величина Δ зависит от характеристик датчиков 15 и 16, блока управления 12, электропривода и должна быть минимальна.
Для замедления грузонесущей ленты 2 приводная лента 1 работает в тормозном режиме. При этом блок управления 12 передает электроприводу управляющий сигнал, обеспечивающий небольшое снижение скорости приводной ленты 1 на роликоопоре 6 по отношению к скорости грузонесущей ленты 2 на роликоопоре 6 VП6<VГ6. Для снижения износа скорость проскальзывания приводной ленты 1 относительно грузонесущей ленты 2 также не должна превышать допустимой величины Δ. Поэтому блок управления 12 на основании сигналов датчиков 15 и 16 формирует и передает электроприводу по кабелю 14 управляющий сигнал, обеспечивающий движение приводной ленты 1 со скоростью в пределах
VГ-Δ≤VП<VГ.
При всех режимах работы ленточного конвейера вследствие неравномерности загрузки, колебательных процессов скорости движения грузонесущей ленты 2 и приводной ленты 1 изменяются случайным образом. Установка датчиков скорости 15 и 16 в месте соприкосновения грузонесущей ленты 2 и приводной ленты 1 или перед ним позволяет блоку управления 12 получать информацию о фактических значениях скорости грузонесущей ленты 2 и приводной ленты 1, формировать и передавать электроприводу управляющий сигнал с минимальным запаздыванием, управлять скоростью движения приводной ленты 1.
Изменение скорости движения приводной ленты 1 в указанных пределах обеспечивает надежную работу промежуточного привода, снижает энергопотребление и износ лент, предотвращает неправильные режимы работы промежуточного привода (например, торможения при необходимости ускорения грузонесущей ленты 2 или тяги при необходимости замедления грузонесущей ленты 2).
Источники информации
1. Дьячков В.К. Многоприводные ленточные конвейеры большой протяженности / В.К. Дьячков. - М.: НИИИНФОРМТЯЖМАШ, 1974. - с.11-12.
2. Патент РФ №2487071, кл. B65G 23/04, опубл. 10.07.2013.
3. Спиваковский А.О. Транспортирующие машины / А.О. Спиваковский, В.К. Дьячков. - М.: Машинстроение, 1983. - с.94-97.
Резинотканевая заготовка и способ изготовления конвейерной ленты
Способ изготовления многослойной ленты
Способ навески грузонесущей и прижимной лент конвейера
Приводной ремень и ременный привод каната
Способ регулирования скорости ленты конвейера
Способ монтажа прижимной ленты конвейера
Синхронный электропривод ленточного конвейера и способ управления им
Промежуточный привод ленточного конвейера
Способ регулирования скорости конвейера с загрузочным бункером
Электрический привод уклонного ленточного конвейера
Резинотканевая заготовка и способ изготовления конвейерной ленты
Способ изготовления многослойной ленты
Способ навески грузонесущей и прижимной лент конвейера
Приводной ремень и ременный привод каната
Способ регулирования скорости ленты конвейера
Способ монтажа прижимной ленты конвейера
Синхронный электропривод ленточного конвейера и способ управления им
Промежуточный привод ленточного конвейера
Способ регулирования скорости конвейера с загрузочным бункером
Электрический привод уклонного ленточного конвейера

