Результат интеллектуальной деятельности: МНОГОСЕКЦИОННОЕ ВЫРАВНИВАНИЕ ДАННЫХ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящая заявка, в целом, связана с областью техники получения изображений и, более конкретно, с выравниванием многочисленных объемных секций данных для получения изображений, чтобы устранять артефакты, сохраняя при этом геометрическую точность. Объект изобретения данной заявки находит конкретное применение в системах получения изображений на основе рентгеновских лучей, в частности, в системах получения изображений посредством компьютерной томографии (СТ) и будет описан с конкретной ссылкой на них. Однако он может также использоваться в сочетании с другими системами получения изображений, такими как системы получения изображений с помощью однофотонной эмиссионной компьютерной томографии (SPECT) или системы получения изображений с помощью позитронной эмиссионной томографии (PET).
Раскрытие изобретения
В соответствии с одним вариантом настоящего изобретения, обеспечивается способ выравнивания многочисленных объемных секций данных для получения изображений. Способ содержит выбор первичной объемной секции и вторичной объемной секции, смежной первичной объемной секции для получения изображений, для перемещения вторичной объемной секции в положение выравнивания с первичной объемной секцией. Затем определяются один или более параметров выравнивания по оси z и параметров по осям x и y для смещения положения вторичной объемной секции с целью выравнивания вторичной объемной секции с первичной объемной секцией. Также обеспечивается соответствующее устройство для выполнения упомянутого способа.
Существует множество доступных алгоритмов выравнивания объемных данных, каждый из которых пригоден для определенных применений. При одном применении способ, соответствующий настоящему изобретению, может использоваться в сочетании с компонентом объединенной системы получения изображений с использованием CT, SPECT/CT или PET/CT, так чтобы конечная система координат CT-изображения была совместима с координатами CT-изображения, используемыми для регистрации PET/CT или SPECT/CT. Конечное СТ-изображение может затем легко быть зарегистрировано в данных для получения изображений с помощью SPECT или PET, чтобы создавать коэффициенты коррекции определения положения и затухания. При другом полезном применении настоящего изобретения объемные секции данных для получения изображений могут выравниваться одновременно со сбором данных для получения изображений, уменьшая, таким образом, общее время, требующееся для создания конечного изображения, и эффективно используя ресурсы вычислений и хранения. Кроме того, настоящее изобретение устойчиво к ошибкам и может давать точные результаты, даже когда положение человека или объекта, для которого получают изображения, смещается поверх стола для получения изображений во время сбора данных для получения изображений.
Краткое описание чертежей
Многочисленные дополнительные выгоды и преимущества станут очевидны специалистам в данной области техники после прочтения нижеследующего подробного описания предпочтительных вариантов осуществления. Изобретение может принимать форму различных компонент и совокупностей компонент и различных технологических операций и совокупностей технологических операций. Чертежи предназначены только для цели иллюстрирования предпочтительных вариантов осуществления и не должны рассматриваться как ограничение изобретения.
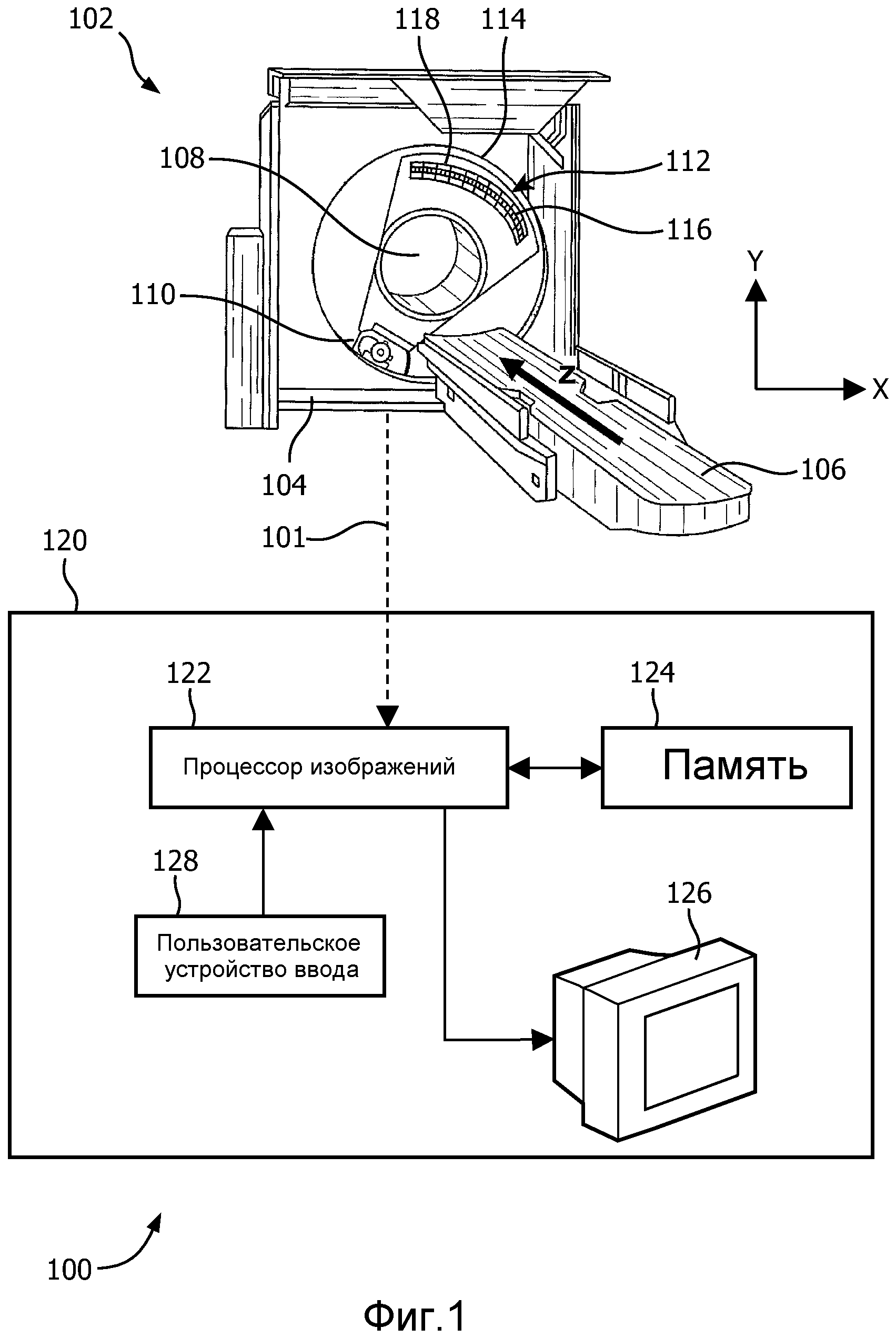
Фиг.1 - пример CT-системы получения изображений с вырезом участка неподвижной портальной рамы, чтобы показать вращающуюся портальную раму, источник рентгеновского излучения и систему измерения данных;
Фиг.2A и 2B - соответственно вид сбоку и вид сверху CT-изображения, полученного объединением трех различных объемных секций без удаления возникающих в результате артефактов;
Фиг.3 - пример способа выравнивания многочисленных объемных секций данных для получения изображений, чтобы удалить артефакты;
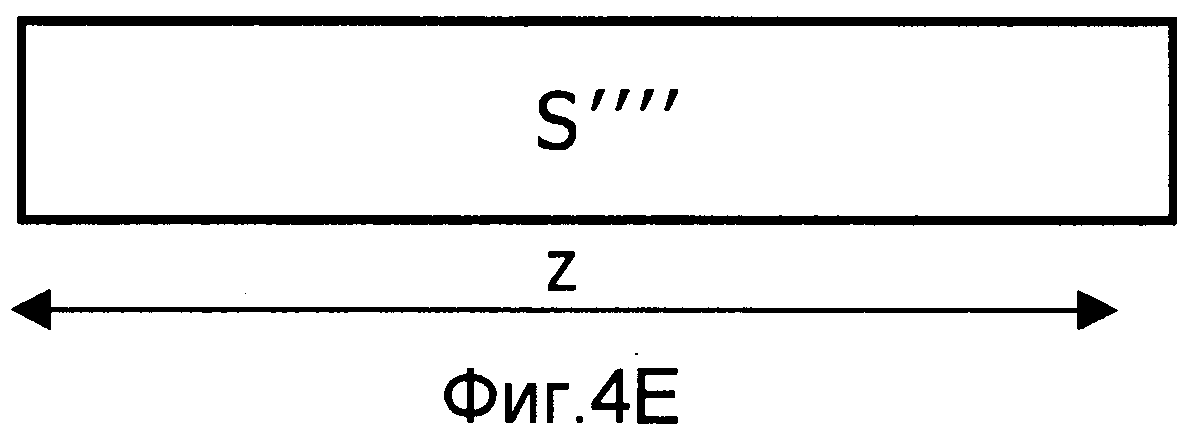
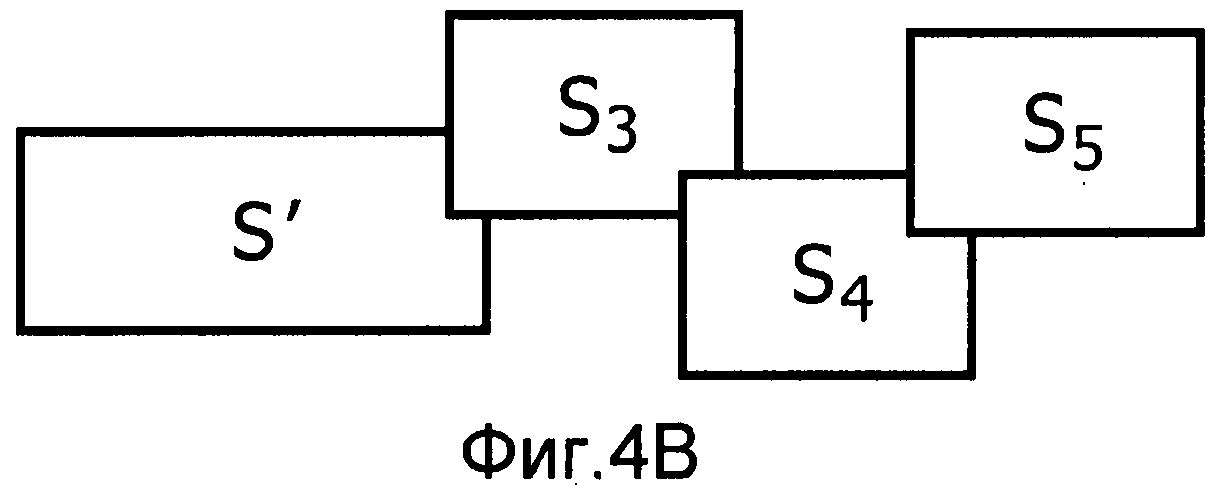
Фиг.4A-4E - схематичное изображение выравнивания пяти различных объемных секций S1-S5, проходящих от одного конца данных для получения изображений и распространяющихся в одном направлении через весь набор данных для получения изображений;
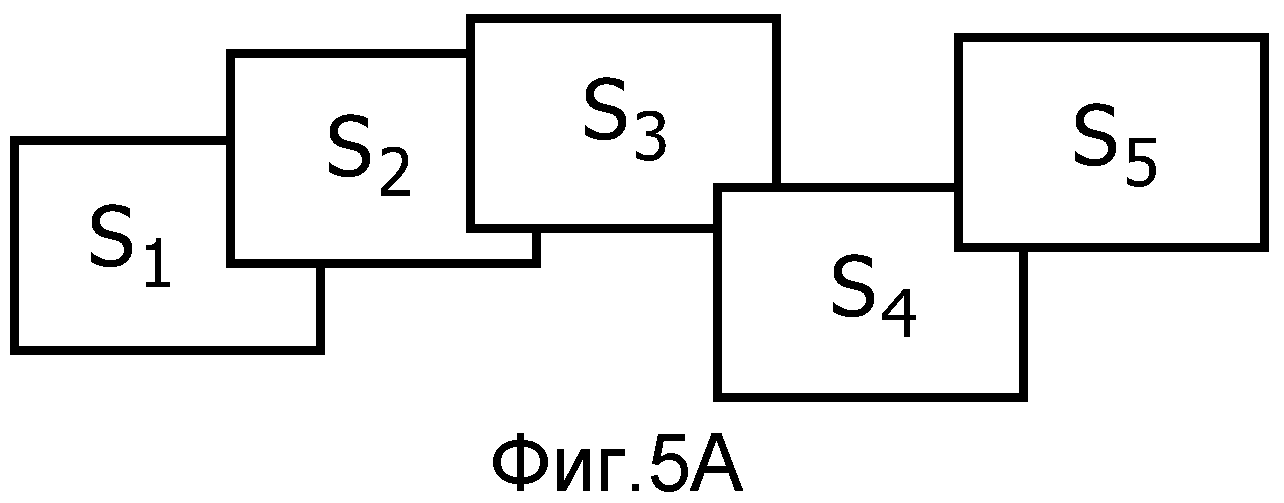
Фиг.5A-5E - схематичное изображение выравнивания пяти различных объемных секций S1-S5, проходящих от центральной секции и распространяющихся в двух противоположных направлениях через весь набор данных для получения изображений; и
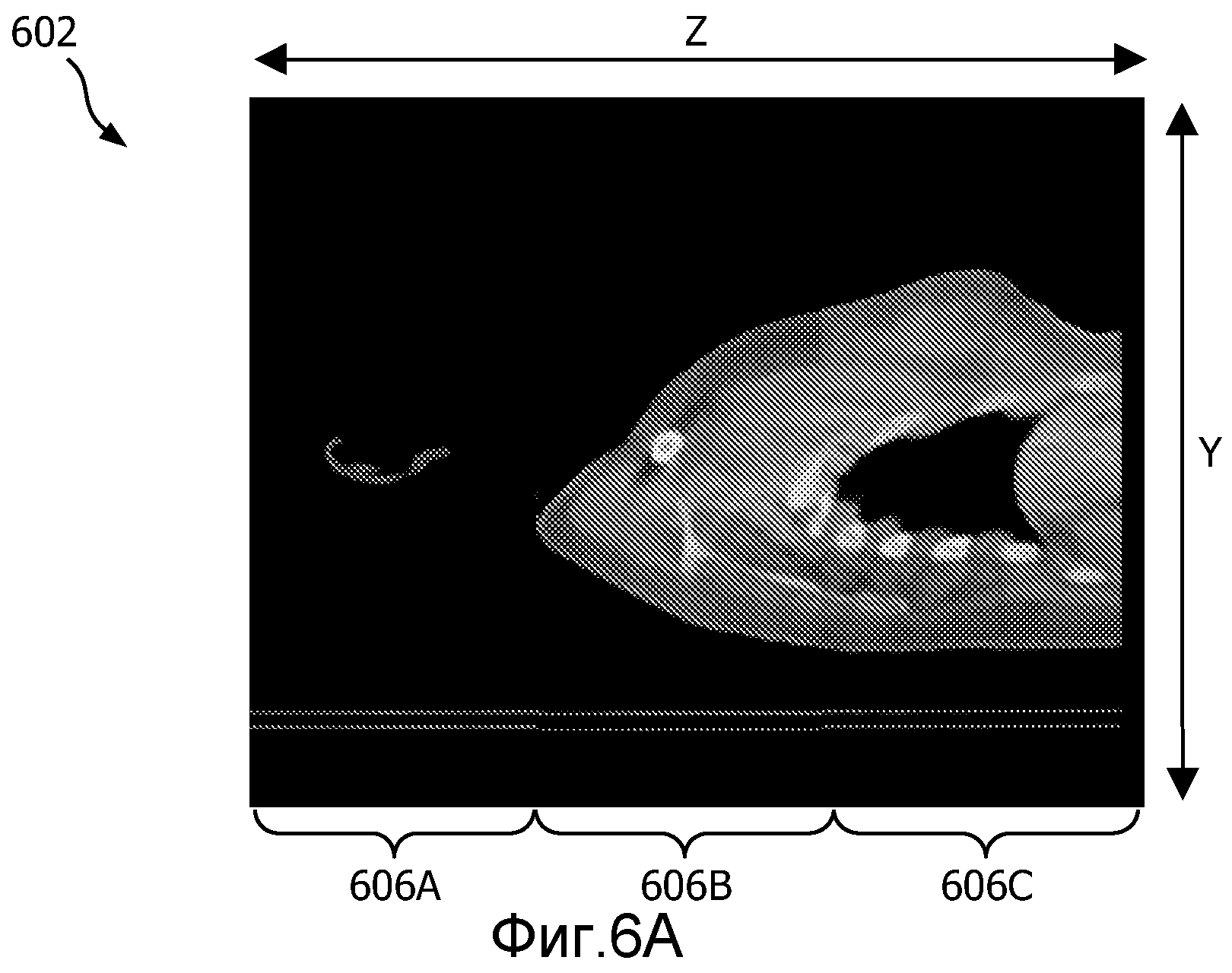
Фиг.6A и 6B - соответственно, вид сбоку и вид сверху CT-изображения, полученного объединением трех различных объемных секций и выравнивания секций для удаления артефактов при получении изображений.
Осуществление изобретения
Система и устройство получения медицинских изображений, соответствующие настоящей заявке, в целом, являются любой системой получения медицинских изображений, например, CT-, SPECT- или PET-системой получения изображений. Более конкретно, со ссылкой на фиг.1, в примере варианта осуществления системой 100 получения изображений является система получения СТ-изображений. Система 102 сбора данных для получения CT-изображений содержит портальную раму 104 и стол 106, движущийся вдоль оси z. Пациент или другой объект, для которого должно быть получено изображение, (не показаны) ложится на стол 106 и перемещается так, чтобы располагаться внутри апертуры 108 портальной рамы 104. Когда пациент или объект находится в нужном положении, источник 110 рентгеновского излучения излучает проекционное рентгеновское излучение, которое должно собираться системой 112 измерения для получения рентгеновских данных внутри портальной рамы 104. (Участок 114 портальной рамы 104 на фиг.1 имеет вырез, чтобы показать источник 110 рентгеновского излучения и систему 112 измерения рентгеновских данных, расположенные внутри портальной рамы 104.) Система 112 измерения данных содержит несколько фотодетекторов 116, расположенных на раме 118. Источник 110 рентгеновского излучения и система 112 измерения данных вращаются вместе вокруг апертуры 108, чтобы регистрировать CT-данные для получения изображений в различных положениях. В некоторых вариантах осуществления такое вращение может происходить в то время, когда стол 106 неподвижен, в других вариантах осуществления такое вращение может происходить в сочетании с линейным перемещением стола 106 вдоль оси z, выполняя "спиральное" сканирование. Вращение возможно, потому что источник 110 рентгеновского излучения и рама 118 отдельно монтируются к общему ротору (не показан) внутри портальной рамы 104.
Система 102 сбора данных для получения СТ-изображений затем передает данные системе 120 получения СТ-изображений, обработки и отображения по линии 101 связи. Хотя системы 102 и 120 показаны и описаны здесь для целей иллюстрации как отдельные системы, в других вариантах осуществления они могут быть частью единой системы. Данные для получения СТ-изображений передаются процессору 122 изображений, который хранит данные в памяти 124. Процессор 122 изображений электронными средствами обрабатывает данные для получения СТ-изображений для создания изображений пациента или другого объекта. Процессор 122 изображений может показать результирующие изображения на связанном с ним дисплее 126. Пользовательское устройство 128 ввода, такое как клавиатура и/или мышь, могут быть предоставлены пользователю для управления процессором 122.
Таким образом, упомянутые выше функции могут выполняться как логика программного обеспечения. Термин "логика", как он используется здесь, содержит, в частности, аппаратурное обеспечение, встроенное микропрограммное обеспечение, программное обеспечение и/или их комбинации для выполнения функции(-ий) или действия(-ий) и/или для вызова функции или действия от другого компонента. Например, основываясь на желаемом применении или потребностях, логика может содержать микропроцессор, управляемый программным обеспечением, дискретную логику, такую как специализированная интегральная микросхема (ASIC), или другое устройство программируемой логики. Логика может также быть полностью реализована как программное обеспечение.
Термин "программное обеспечение", как он используется здесь, содержит, в частности, одну или более считываемых и/или исполняемых компьютером команд, которые заставляют компьютер или другое электронное устройство выполнять функции, действия и/или вести себя требуемым образом. Команды могут осуществляться в различных формах, таких как стандартные программы, алгоритмы, модули или программы, содержащие отдельные приложения или управляющую программу из динамически соединенных библиотек. Программное обеспечение может также реализовываться в различных формах, таких как автономная программа, вызов функции, сервлет, апплет, команды, хранящиеся в памяти, такой как память 124, часть операционной системы или другой тип исполняемых команд. Специалисты в данной области техники должны понимать, что форма программного обеспечения зависит, например, от требований желаемого приложения, среды, в которой оно работает, и/или от требования разработчика/программиста и т. п. Системы и способы, описанные здесь, могут быть реализованы на множестве платформ, в том числе, например, сетевые системы управления и автономные системы управления. Дополнительно, показанная и описанная здесь логика предпочтительно находится на считываемом компьютерном носителе, таком как память 124. Примеры различных считываемых компьютерных носителей содержат флэш-память, постоянное запоминающее устройство (ROM), оперативную память (RAM), программируемое постоянное запоминающее устройство (PROM), электрически программируемое постоянное запоминающее устройство (EPROM), электрически стираемую оперативную память (EEPROM), магнитный диск или ленту, оптически считываемые носители, в том числе CD-ROM и DVD-ROM и другие. Еще дополнительно, описанные здесь процессы и логика могут объединяться в одну большую последовательность выполнения операций или разделяться на многочисленные субпоследовательности выполнения операций. Порядок, в котором описаны здесь последовательности выполнения операций, не является критичным и может изменяться, приводя к тем же самым результатам. Конечно, описанные здесь последовательности выполнения операций могут изменяться, объединяться и/или реорганизовываться при их реализациях в соответствии с предписанием или пожеланием.
Система 100 получения изображений может быть автономным блоком, обеспечивающим только получение изображений на основе CT, как показано на фиг.1. Хотя на чертежах не показано, система 100 получения изображений может дополнительно содержать соответствующие компоненты для PET и/или для получения изображений посредством SPECT или некоторого другого вида(-ов) способа получения изображений в сочетании с основанными на CT компонентами получения изображений.
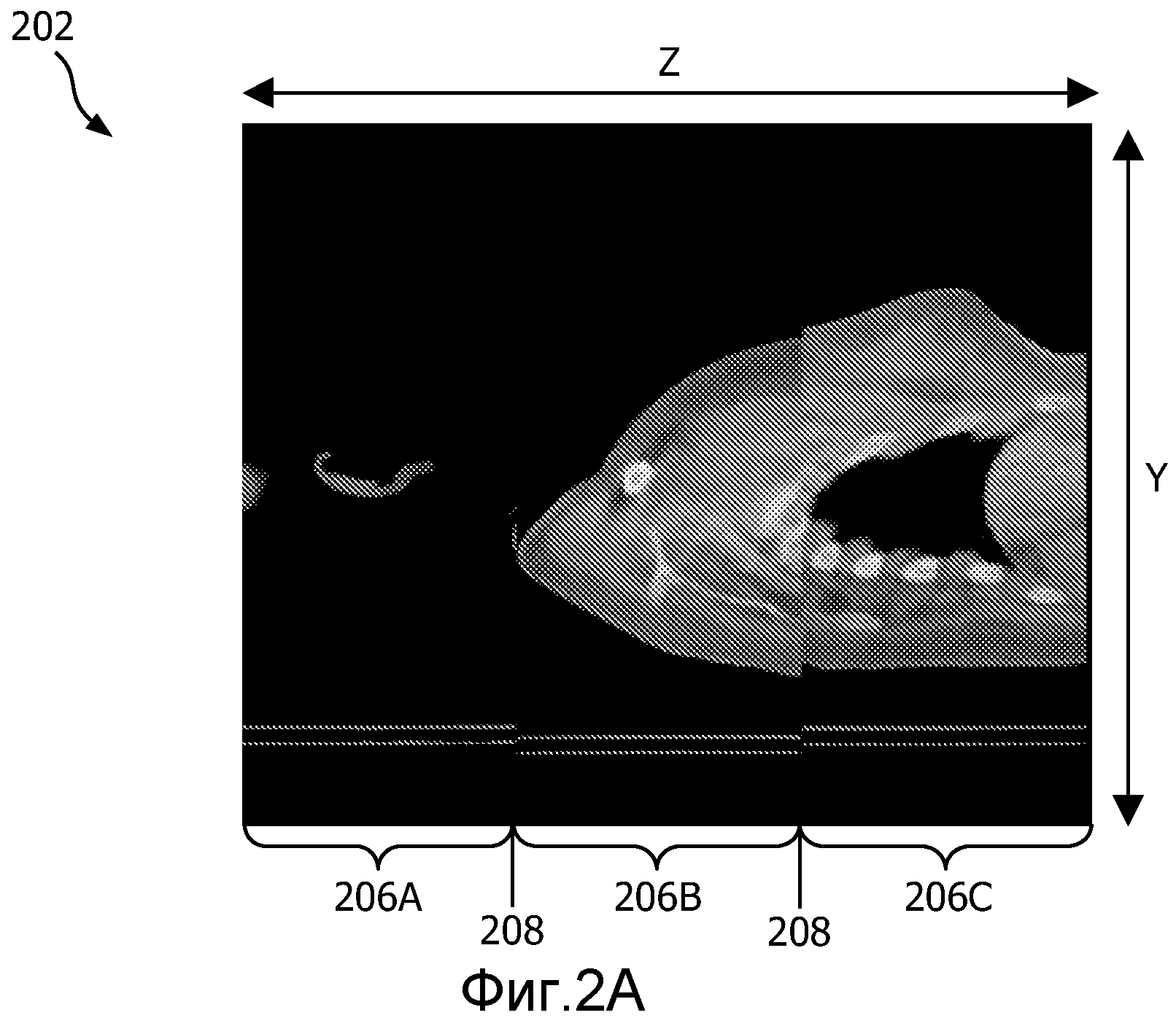
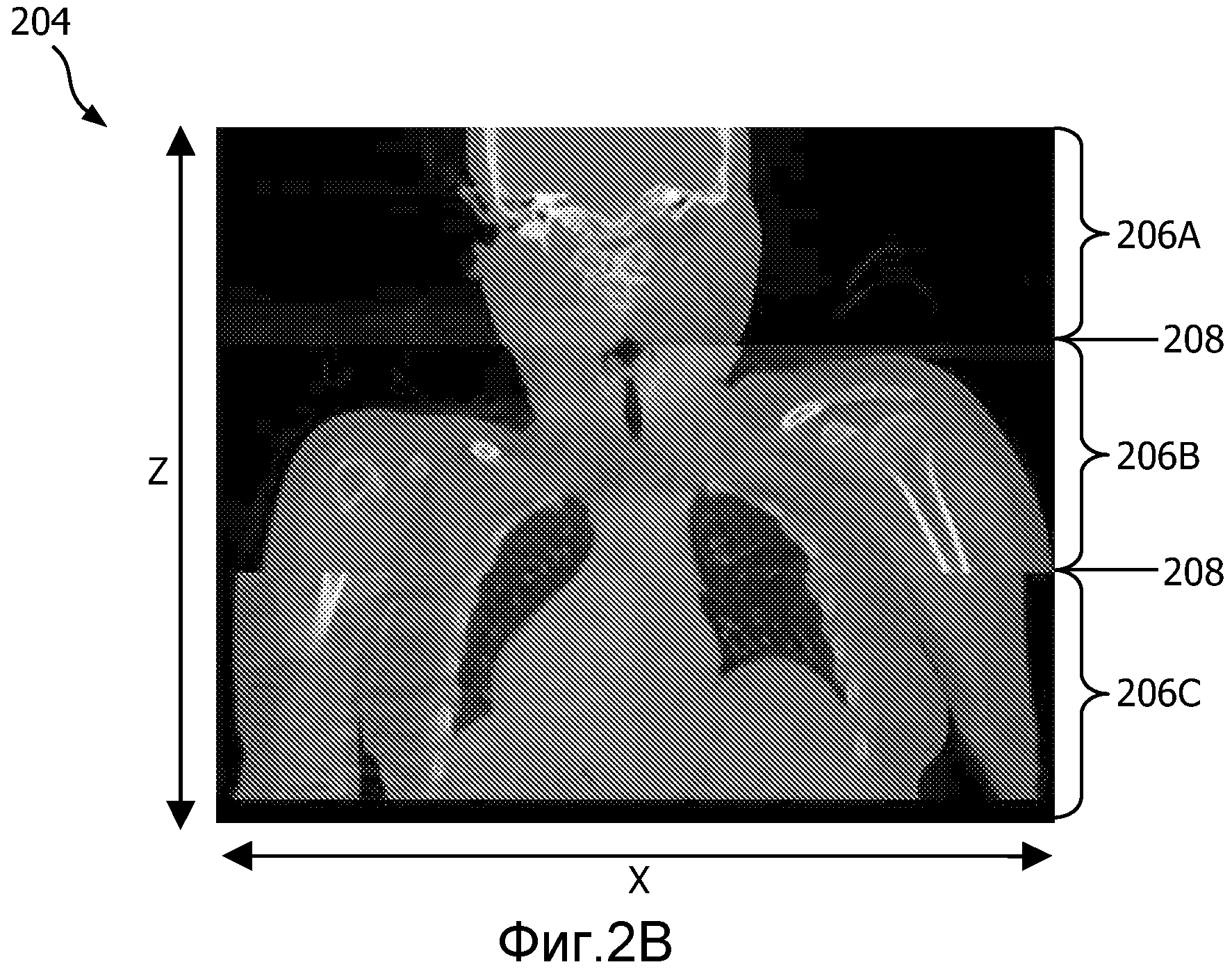
Независимо от используемого способа получения изображений, CT, SPECT, PET или какого-то другого способа или их комбинации, данные для получения изображений, собранные системой получения изображений, могут записываться в отдельных объемных секциях для получения изображений вдоль продольной оси z, показанной на фиг.1. Смежные объемные секции для получения изображений могут в некоторой степени перекрываться или не перекрываться друг с другом. Отдельные объемные секции для получения изображений могут объединяться вместе, чтобы формировать одно полное изображение человека или объекта, для которого должно быть получено изображение. Это показано, например, на фиг.2A и 2B. На фиг.2A представлено CT-изображение, содержащее вид 202 сбоку человека, тогда как на фиг.2B представлено CT-изображение, содержащее вид 204 сверху того же самого человека. Каждое из изображений 202 и 204, полученных в результате объединения трех отдельных объемных секций 206A, 206B и 206C вдоль продольной оси z человека, для которого должно быть получено изображение. Как можно видеть из изображений 202 и 204, эти три отдельные секции 206A, 206B и 206C не были должным образом выровнены. Это вызывает артефакты 208 при получении изображений, которые должны появляться на границе и/или в перекрывающихся областях между смежными объемными секциями 206 данных для получения изображений.
Любой тип сбора данных для получения изображений может быть выполнен, чтобы создать отдельные объемные секции 206 данных для получения изображений, но в предпочтительном варианте осуществления сбор данных для получения изображений выполняется способом "пошаговой съемки", чтобы создавать каждую секцию 206. При пошаговой съемке стол 106 остается неподвижным, тогда как источник 110 рентгеновского излучения и система 112 измерения рентгеновских данных вращаются вокруг стола 106 с дискретными интервалами вращения или "шагами", затем они останавливаются, чтобы зарегистрировать данные для получения изображений или "сделать снимок" при каждом шаге. В особенно предпочтительном варианте осуществления длина каждой объемной секции 206 вдоль оси z равна эффективной ширине при получении изображений системы 112 измерения рентгеновских данных вдоль оси z. В этом случае каждая секция 206 является результатом одного оборота вращения "пошаговой съемки" вокруг стола 110. Сбор данных при "пошаговой съемке" особенно полезен в сочетании с системами 112 измерения рентгеновских данных, являющимися рентгеновскими детекторами в виде плоской панели. Если объект, для которого должно быть получено изображение, является слишком длинным, чтобы быть охваченным шириной системы 112 измерения данных вдоль оси z, сбор данных для получения изображений посредством "пошаговой съемки", однако, естественно приводит в результате к многочисленным объемным секциям 206, которые должны затем объединяться, чтобы сформировать полное изображение. Этот процесс вносит артефакты неточного секционного совмещения на границах/перекрытиях между смежными секциями, которые показаны как позиция 208 на фиг.2A и 2B.
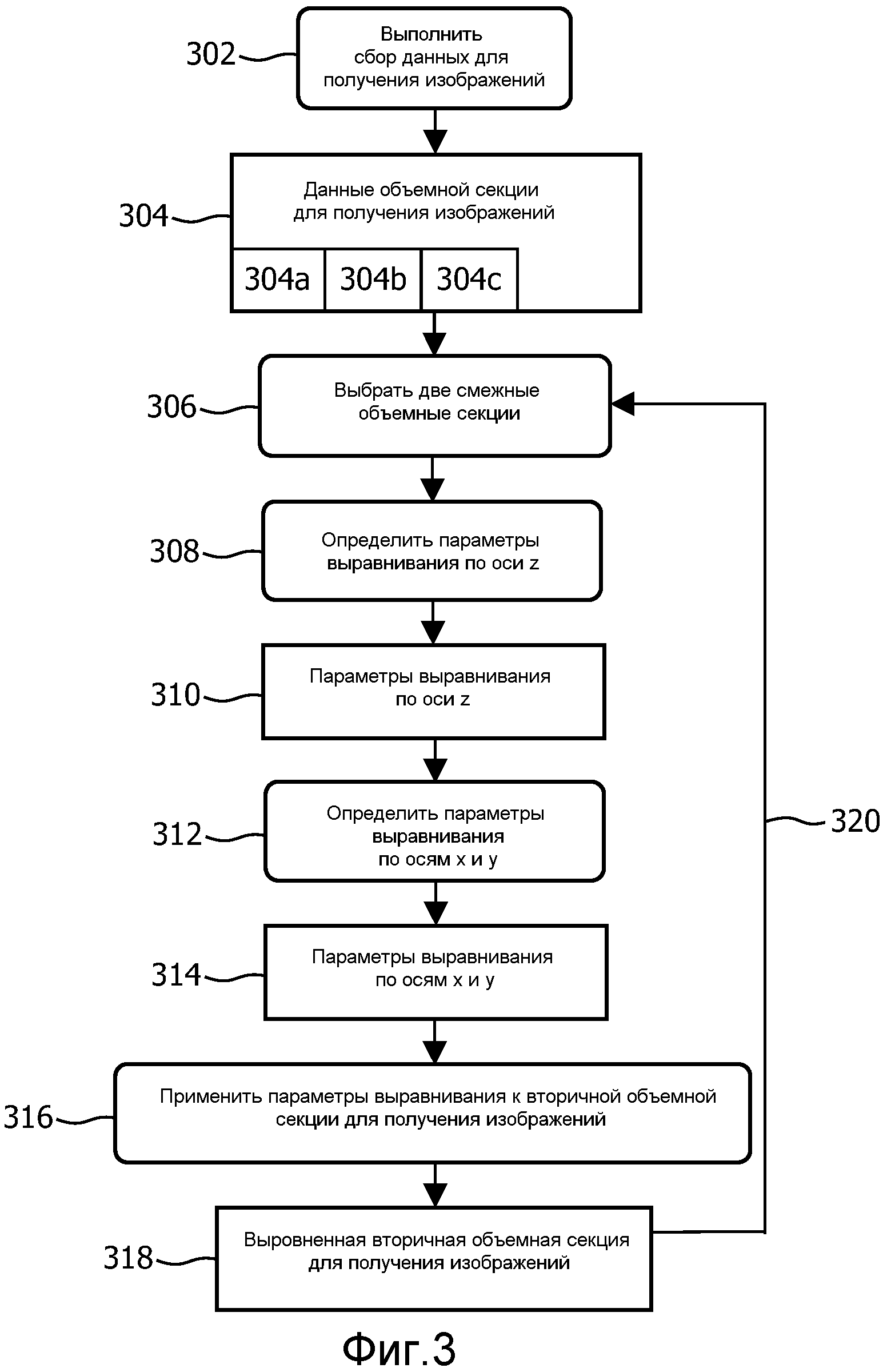
Поэтому настоящее раскрытие касается изображения, основанного на способе 300, который устраняет артефакты, как показано, например, на фиг.3. На этапе 302 выполняется сбор данных для получения изображений, чтобы создавать объемные секционные данные 304 для получения изображений. Например, система 100 получения СТ-изображений может быть использована для создания объемных секционных данных 304 для получения СТ-изображений. Данные 304 содержат по меньшей мере две отдельные объемные секции 304a, 304b, 304c и т. д. данных для получения изображений. В типичном примере каждая объемная секция данных для получения изображений содержит матрицу x, y, z размером 512 x 512 x 202 вокселей для получения изображений, с изотропным размером воксела 1 мм3. Оси x, y и z для такой матрицы указаны на фиг.1, 2A и 2B. В типичном примере способ 300 приводит в результате к конечному изображению, имеющему размер 512 x 512 x (202)(S) вокселей, с изотропным размером воксела 1 мм3, где S - количество объемных секций, образующих все объемные секционные данные 304.
На этапе 306 для выравнивания выбираются две смежные объемные секции: первичная секция и вторичная секция. При традиционной реализации способа первичная объемная секция соответствует первой секции 304a для получения изображений, а вторичная объемная секция соответствует второй секции 304b для получения изображений. Из-за механических ошибок при регистрации положений стола 106 и/или ротора, поддерживающего источник 110 рентгеновского излучения и систему 112 измерения рентгеновских данных во время сканирования на этапе 302 для получения изображений, координаты по оси z зарегистрированных на этапе 304 данных для получения изображений часто неточны на небольшую величину. Таким образом, на этапе 308 применяется согласующий фильтр, чтобы выровнять первичную объемную секцию и вторичную объемную секцию вдоль оси z. Результатом этапа 308 может быть, например, параметр 310 выравнивания по z, представляющий расстояние, на которое нужно сместить вторичную объемную секцию вдоль оси z, чтобы должным образом совместить вторичную объемную секцию с первичной объемной секцией.
В одном варианте осуществления на этапе 308 может использоваться следующий алгоритм согласующего фильтра. Этот конкретный согласующий фильтр пытается согласовать одиночный срез для получения изображения, перпендикулярный оси z в первичной объемной секции 304a, с соответствующим срезом для получения изображения, перпендикулярным оси z во вторичной объемной секции 304b. Два среза соответствуют друг другу, когда их карты интенсивности для получения изображений достаточно схожи, чтобы предположить, что они являются срезами для получения изображения одного и того же участка человека или объекта, для которых получают изображение. Таким образом, обозначим карту интенсивности одиночного среза для получения изображений в первичной объемной секции 304a как:
f(x,y),(-N/2 ≤ x, y ≤ N/2),  (1)
(1)
где f - зарегистрированная интенсивность для получения изображений воксела, расположенного в координатах x, y в выбранном срезе для получения изображений, и N равно общему количеству вокселей вдоль оси x или вдоль оси y. Затем обозначим карты интенсивности всего набора срезов для получения изображений, перпендикулярных оси z во вторичной объемной секции 304b, которые должны быть согласованы с картой интенсивности выбранного среза, соответствующего уравнению (1), в первичной объемной секции 304a, как:
g
i
(x,y),(-N/2 ≤ x, y ≤ N/2), (0 ≤ i ≤ M),  (2)
(2)
где g - зарегистрированная интенсивность для получения изображений воксела, расположенного в координатах x, y в заданном срезе i, перпендикулярном оси z, и М является общим количеством таких срезов для получения изображений во вторичной объемной секции 304b.
Деление преобразований Фурье уравнений (1) и (2) дает в результате:
 ,
, (3)
(3)
так что функция измерения определяется как инверсия преобразования Фурье:
 (4)
(4)
Максимум функции измерения h i (x,y) указывает, какой из срезов i для получения изображений во вторичной объемной секции 304b наиболее близко совпадает с выбранным срезом для получения изображений в первичной объемной секции 304a. Расположение пика энергии представляет смещение начала координат (x0, y0) вторичной объемной секции 304b вдоль оси z относительно первичной объемной секции 304a, чтобы выровнять их вместе. Таким образом, параметр 310 выравнивания по z:

 (5)
(5)
представляет смещение вдоль оси z вторичной объемной секции 304b, чтобы должным образом выровняться с первичной объемной секцией 304a. Одним из преимуществ этого частного алгоритма 308 согласующего фильтра является то, что он использует высокочастотное содержание данных для получения изображений. Таким образом, он устойчив к ошибкам в отношении изменений значений интенсивности f и g.
Когда первичная и вторичная смежные объемные секции 304a и 304b были должным образом согласованы на этапе 308, чтобы соответствующим образом накладываться друг на друга вдоль оси z, затем на этапе 312 определяются следующие параметры 314 для выравнивания двух смежных объемных секций 304a и 304b вдоль их соответствующих координат по осям x и y. Например, вторичная объемная секция 304b может быть линейно преобразована вдоль оси x и/или линейно преобразована вдоль оси y, и/или вращаться вокруг оси z, чтобы выровнять ее с первичной объемной секцией 304a.
В одном из типичных вариантов осуществления выравнивание 312 может продолжаться следующим образом. Сначала параметры 314 выравнивания по осям x и y определяются следующим образом:
 ,
,
 (6)
(6)
где значения x и y идентифицируют величину линейного поступательного смещения, которое должно быть произведено для вторичной объемной секции 304b вдоль этих соответствующих осей, и θ идентифицирует величину вращательного изменения, которое должно быть произведено для вторичной объемной секции 304b вокруг оси z, чтобы выровнять две смежные объемные секции 304a и 304b вдоль их соответствующих координат по осям x и y. Функция ошибки может в этом случае быть определена следующим образом:
 ,
(7)
,
(7)
где I - заданный номер среза i для получения изображения для вторичной объемной секции 304b вдоль оси z, и FOV - функция круговой маски. Функция FOV круговой маски центрируется на оси z с радиусом R и функция FOV равна единице внутри круга и нулю вне круга. Вектор ν смещения в уравнении (6), который обеспечивает минимальное значение функции ошибки согласно уравнению (7), будет соответствовать величине смещения, которое должно быть приложено к вторичной объемной секции 304b, чтобы выровнять ее с первичной объемной секцией 304a. Такая минимизация может быть проведена любым известным способом, таким как способ наименьших квадратов. Минимизация может также быть выполнена, используя симплексный способ с начальными значениями смещения, полученными из уравнения (5). Эти начальные значения имеют тенденцию приводить к результату симплексного способа, который сходится быстро и точно.
В этом пункте примера способа 300 были определены параметры 310, 314 выравнивания, чтобы переместить вторичную объемную секцию 304b для ее выравнивания с первичной объемной секцией 304a. Затем, на этапе 316 объемные данные 304 для получения изображений для вторичной объемной секции 304b корректируются, используя билинейную интерполяцию. То есть параметры 310, 314 выравнивания применяются к данным 304b, чтобы сместить положение карты g интенсивности и выровнять ее с первичной объемной секцией 304a, создавая выровненную вторичную объемную секцию 318 для получения изображений. В этом алгоритме единственной информацией, необходимой от первичной объемной секции 304a, является карта f интенсивности. Осуществление этого смещения вторичной объемной секции 304b для получения изображений с помощью буфера FIFO, действующего в порядке поступления, может минимизировать объем дополнительного хранилища памяти хранения, требующегося для процесса выравнивания.
Затем на этапе 320 примера способа 300 для выравнивания выбираются еще две смежные объемные секции. При традиционной реализации, если первые две первичная и вторичная объемные секции были выбраны соответственно так, чтобы быть первой объемной секцией 304а для получения изображений и второй объемной секцией 304b для получения изображений, то в этой второй итерации в качестве первичной объемной секции может быть для удобства выбрана вторая объемная 304b секция для получения изображений (выровненная после первой итерации) и вторичной объемной секцией должна быть выбрана третья объемная секция 304c для получения изображений. В этой реализации вторая секция 304b для получения изображений остается неизменной и параметры 310, 314 выравнивания определяются для смещения положения третьей секции 304c для получения изображений, чтобы выровнять ее с положением второй секции 304b для получения изображений. Когда это выполнено, способ 300 возвращается снова к этапу 320, чтобы выровнять другие две смежные объемные секции, такие как секции 304c и 304d. Эти итерации 320 продолжаются до тех пор, пока должным образом не будут выровнены друг с другом все объемные секции 304 для получения изображений.
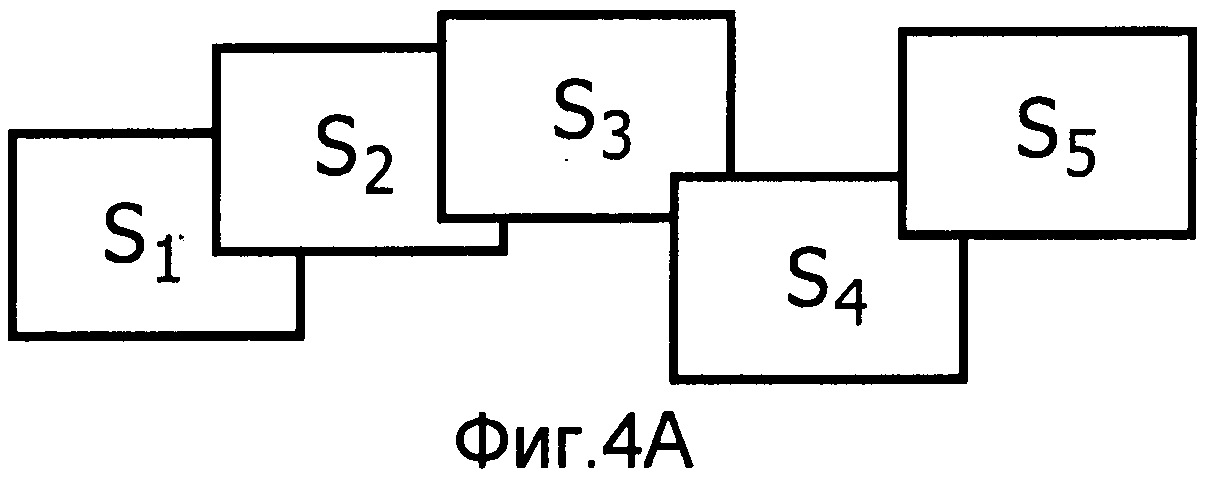
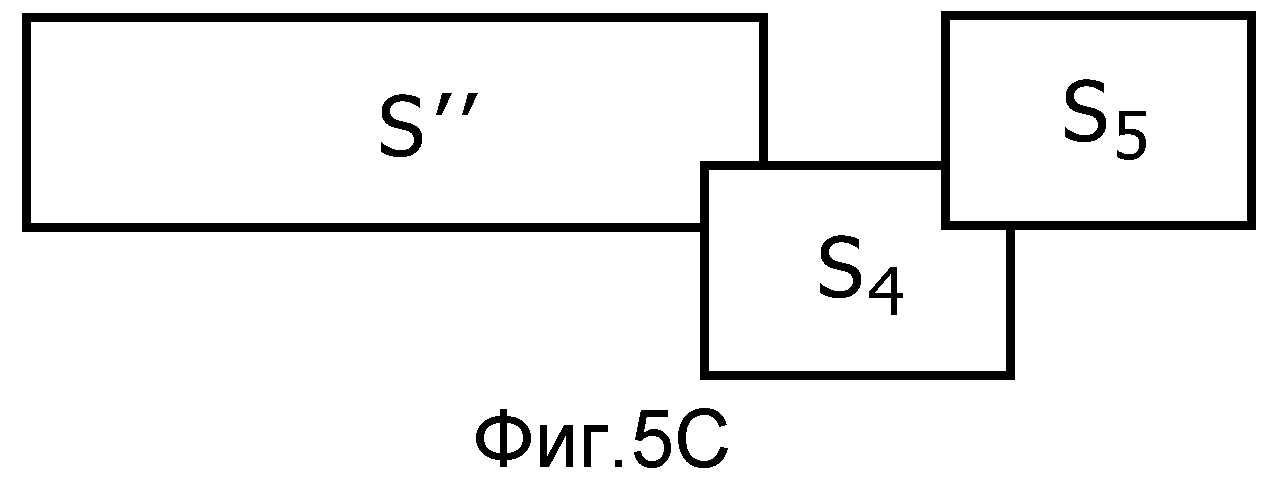
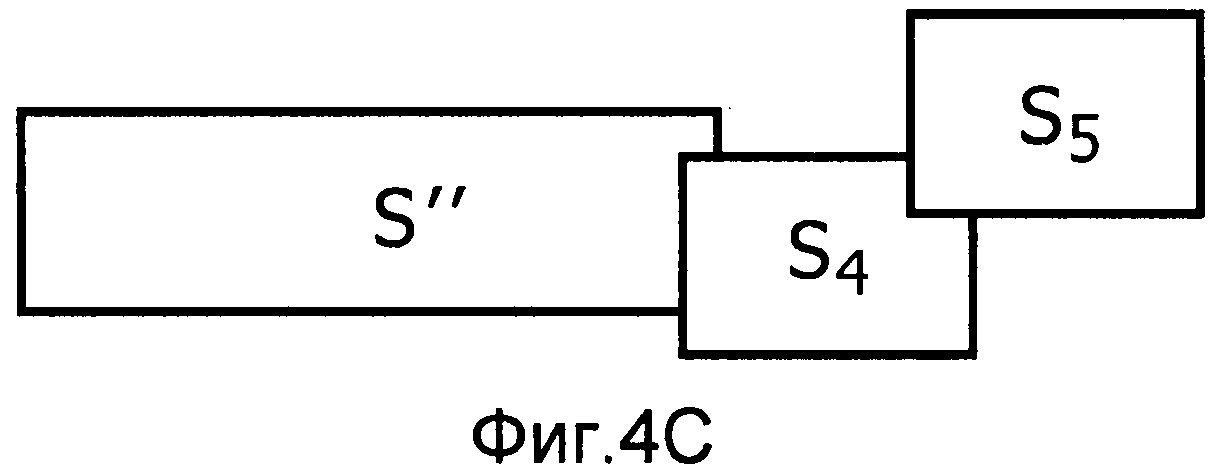
Этот процесс схематично показан на фиг.4A-4E с типичным примером выравнивания пяти различных объемных секций S1-S5. На этих чертежах показан вид сбоку секций S1-S5 для получения изображений по мере того, как продолжается выполнение способа выравнивания. На этих чертежах ось z проходит горизонтально, как показано на фиг.4E. На фиг.4A показано отсутствие выравнивания между пятью секциями перед тем, как будет применен способ. После начальной итерации 320 способа 300 первые две объемные секции S1 и S2 выравниваются, чтобы сформировать объединенное изображение S', как показано на фиг.4B. При следующей итерации 320 способа следующая смежная объемная секция 53 выравнивается с объединенным изображением S', чтобы сформировать другое объединенное изображение S", как показано на фиг.4C. При следующей итерации 320 способа следующая смежная объемная секция 54 выравнивается с объединенным изображением S", чтобы сформировать другое объединенное изображение S"', как показано на фиг.4D. При следующей и последней итерации 320 способа следующая смежная объемная секция S5 выравнивается с объединенным изображением S"', чтобы сформировать другое объединенное изображение S"", как показано на фиг.4E.
Билинейная интерполяция является способом приближения, при котором, чем меньше смещение, которое должно корректироваться в изображении, тем более точным будет конечный результат. В предшествующем описании первые две смежные объемные секции, которые должны быть выровнены, S1 и S2, находятся на одном конце данных для получения изображений, и алгоритм выравнивания при этом проходит через все данные для получения изображений в одном направлении (вправо на фиг.4A-4E), чтобы выровнять каждую последующую смежную объемную секцию. На каждом этапе первичная объемная секция фиксируется с помощью вектора смещения vp=[0,0,0], и вторичная объемная секция затем интерполируется с нефиксированным вектором смещения va = [x, y, θ], где значения x, y и θ определяются, чтобы выровнять две смежные объемные секции.
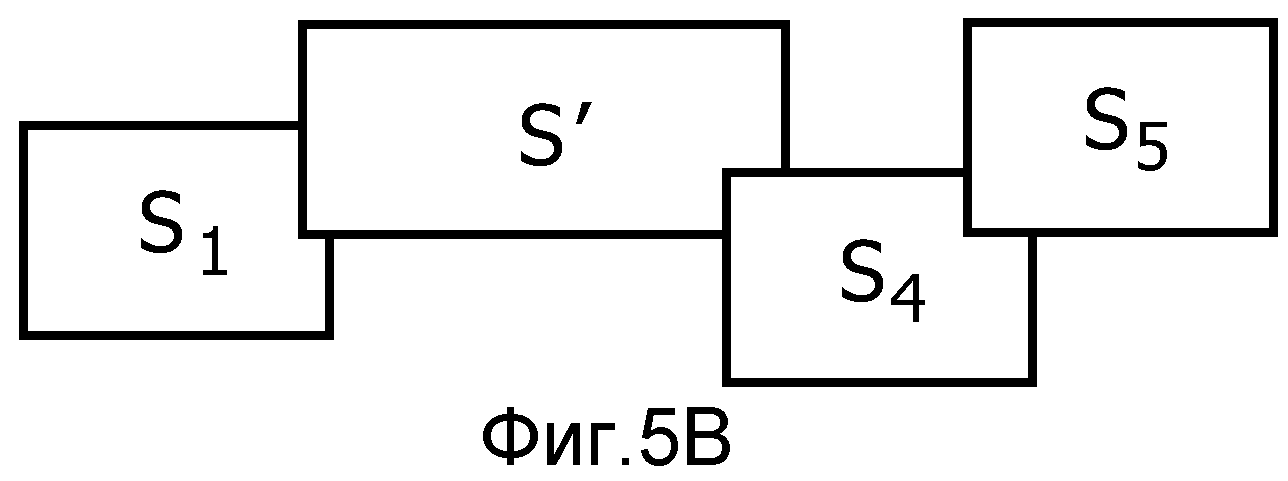
В качестве альтернативного примера, однако, положения первичной и вторичной объемных секций могут варьироваться, чтобы выровнять их друг с другом. Таким образом, оба вектора смещения vp и va могут рассматриваться как нефиксированные переменные, так чтобы обе объемные секции могли интерполироваться, но с меньшим смещением. Как типичный пример, можно начать в центральной объемной секции для данных получения изображений и затем следовать двум изменениям распространения выравнивания, по одному в каждом направлении, проходящем от центральной объемной секции. Таким образом, полагаем S=5, чтобы существовало пять объемных секций для выравнивания, как схематично показано на фиг.5A-5D. Затем абсолютное смещение для среднего объема S3 может быть определено следующим образом:
 ,
(8)
,
(8)
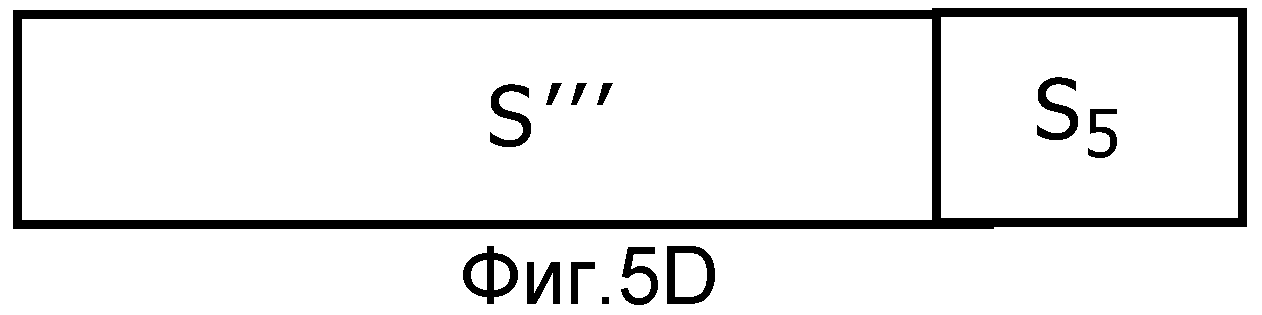
где  представляет смещение объема j относительно объема i. Затем должны существовать две цепочки распространения смещения от S3 к S2 и к S1, как показано на фиг.5B и 5C, и от S3 к S4 и к S5, как показано на фиг.5D и 5E. Таким образом, все пять объемных секций S1-S5 получат необходимые минимальные исправления, начиная от центра изображения и перемещаясь к концам. Это, вероятно, должно уменьшить абсолютное смещение каждой объемной секции по сравнению с началом на одном конце и перемещением в одном направлении через весь набор для получения изображений. Такая минимизация абсолютных смещений может улучшить результаты выравнивания билинейной интерполяции.
представляет смещение объема j относительно объема i. Затем должны существовать две цепочки распространения смещения от S3 к S2 и к S1, как показано на фиг.5B и 5C, и от S3 к S4 и к S5, как показано на фиг.5D и 5E. Таким образом, все пять объемных секций S1-S5 получат необходимые минимальные исправления, начиная от центра изображения и перемещаясь к концам. Это, вероятно, должно уменьшить абсолютное смещение каждой объемной секции по сравнению с началом на одном конце и перемещением в одном направлении через весь набор для получения изображений. Такая минимизация абсолютных смещений может улучшить результаты выравнивания билинейной интерполяции.
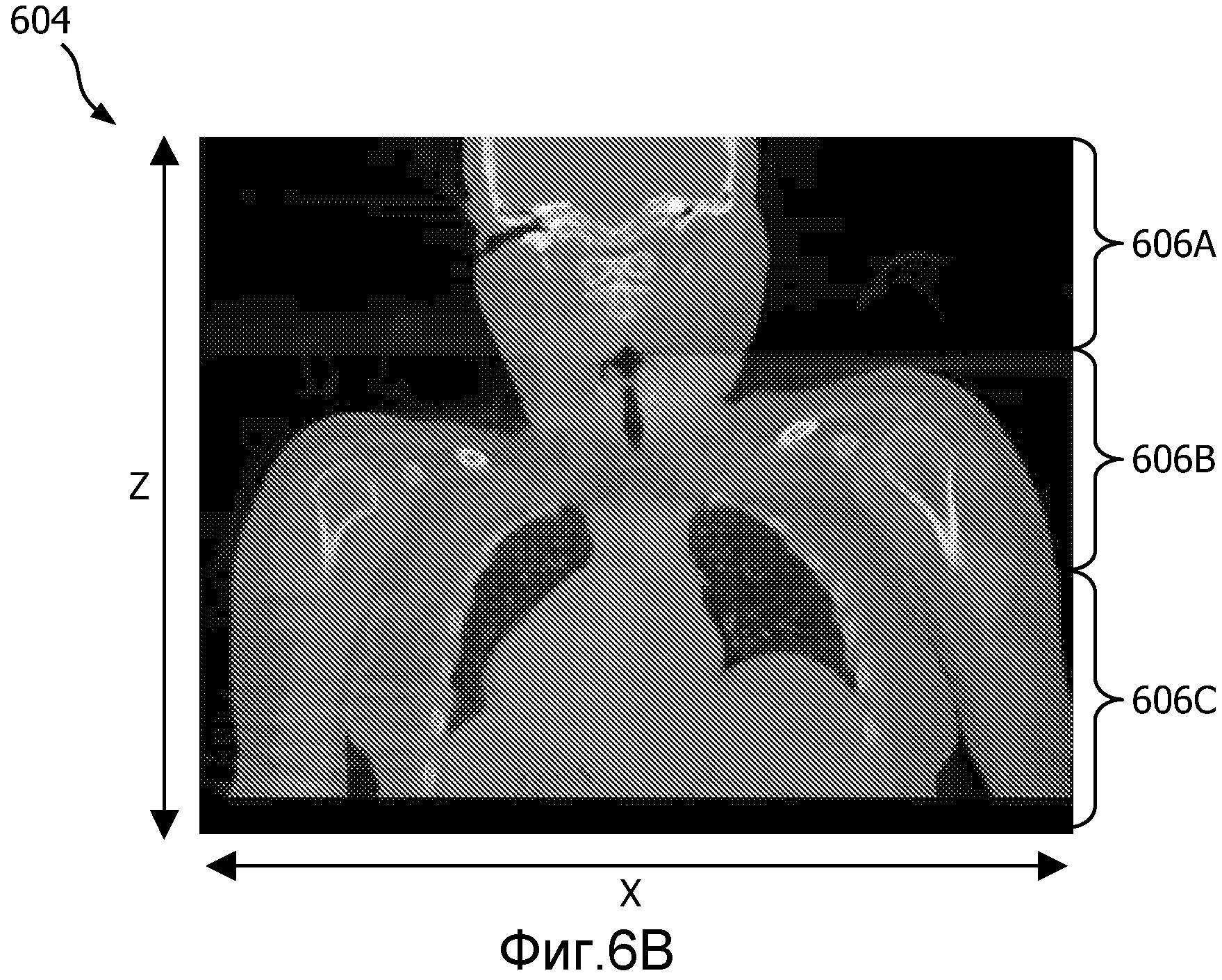
Примеры выравниваемых изображений, являющихся результатом такого способа выравнивания, как способ 300, показаны на фиг.6A и 6B. На фиг.6A приведено СТ-изображение, содержащее вид 602 сбоку человека, тогда как на фиг.6B приведено СТ-изображение, содержащее вид 604 сверху того же самого человека. Изображения 602 и 604 являются изображениями, каждое из которых получено в результате объединения трех отдельных объемных секций 606A, 606B и 606C вдоль продольной оси Z человека, для которого получают изображение. Как может быть видно на изображениях 602 и 604, три отдельных участка 606A, 606B и 606C были должным образом выровнены, чтобы избежать артефактов, присутствующих в изображениях на фиг.2A и 2B.
Секционный алгоритм 300 получения изображений, описанный здесь, предпочтительно может быть реализован в сочетании непосредственно со сбором 302 данных для получения изображений 302, чтобы уменьшить общее количество времени, требующегося для создания окончательного изображения, и эффективно использовать вычислительные ресурсы и ресурсы хранилища памяти. Способ 300 может альтернативно быть реализован только после того, как все данные 304 для получения изображений были получены, и при некоторых обстоятельствах это может обеспечить лучший результат.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. Очевидно, что после прочтения и осмысления предшествующего подробного описания специалисты в данной области техники смогут осуществить в нем модификации и изменения. Подразумевается, что изобретение считается содержащим в себе все такие модификации и изменения, насколько они попадают в пределы объема приложенной формулы изобретения или ее эквивалентов. Изобретение может принимать форму различных химических составов, компонент и устройств, комбинации и подкомбинаций элементов раскрытых вариантов осуществления.
Автоматизированная идентификация кристаллов, выполняемая посредством модифицируемых шаблонов
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

