Результат интеллектуальной деятельности: СПОСОБ РЕГИСТРАЦИИ ДИНАМИКИ ДВИЖЕНИЯ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к контролю параметров движения объекта и может быть использовано, в частности, для измерения параметров динамики движения автотранспортных средств (АТС) при их испытаниях с учетом продольной и поперечной составляющих.
Известен способ регистрации параметров движения АТС при испытаниях, основанный на использовании механического прибора для считывания пройденного автомобилем пути с помощью дополнительного колеса (так называемого «пятого колеса» или колеса «Пейслера»), закрепленного на автомобиле и повторяющего движение автомобиля [DE 4214607 С1 (1 июля 1993) Goetz 8037 Olching De Peiseler].
К недостаткам данного способа и приборов данного типа следует отнести невозможность измерения поперечного перемещения автомобиля и большая вероятность выхода из строя при заносе или резком смещении транспортного средства в поперечном направлении.
Известен способ растрового оптического измерения скорости объекта [RU 2482499 C2 (заявлен 01 июля 2010 г., опубл. 20 мая 2013 г.)], основанный на формировании пространственной амплитудной модуляции света, отраженного от объекта, с помощью растра, расположенного между оптической системой и фотоприемниками, и детектировании модулированного света с помощью минимум четырех фотоприемников и минимум трех дифференциальных усилителей, по частоте результирующего электрического сигнала, с которых судят о скорости объекта.
Недостатком известного способа (далее способ регистрации динамики движения объекта) является недостаточная точность, обусловленная тем, что измерение производится не для центра масс объекта, а для точки, в которой закреплена регистрирующая аппаратура. Это приводит к значительным погрешностям в конечных результатах испытаний, особенно при криволинейном движении объекта, например при ходовых испытаниях автомобиля (режимы испытаний «переставка», «змейка», «поворот» и пр.).
В основу изобретения положена задача повышения точности измерений параметров динамики движения объекта путем определения фактической траектории движения его центра масс.
Поставленная задача решается тем, что в способе регистрации динамики движения объекта, по которому параметры движения объекта определяют по сигналам смещения регистрирующей аппаратуры, размещенной на нем, относительно поверхности движения, согласно изобретению в качестве регистрирующей аппаратуры использованы две синхронизированные видеокамеры, которые располагают на объекте параллельно оси его движения таким образом, что их оптические оси направлены непосредственно на поверхность движения объекта, проводят видеосъемку поверхности во время движения объекта, по результатам анализа видеозаписи вычисляют координаты центра масс объекта


по которым определяют параметры динамики движения для центра масс объекта, где
 ,
,  - координаты центра изображения первой видеокамеры на кадре i+1 относительно начала координат;
- координаты центра изображения первой видеокамеры на кадре i+1 относительно начала координат;
 ,
,  - координаты центра изображения второй видеокамеры на кадре i+1 относительно начала координат;
- координаты центра изображения второй видеокамеры на кадре i+1 относительно начала координат;
x, y - координаты центра масс объекта относительно начала координат в момент съемки i-го кадра;
x', y' - координаты центра масс объекта относительно начала координат в момент съемки кадра i+1;
O1O2 - расстояние между центрами видеокамер, м;
i=1, 2, 3, …, n - номер кадра видеоряда.
Параметры динамики движения объекта определяют в продольном и/или поперечном направлениях.
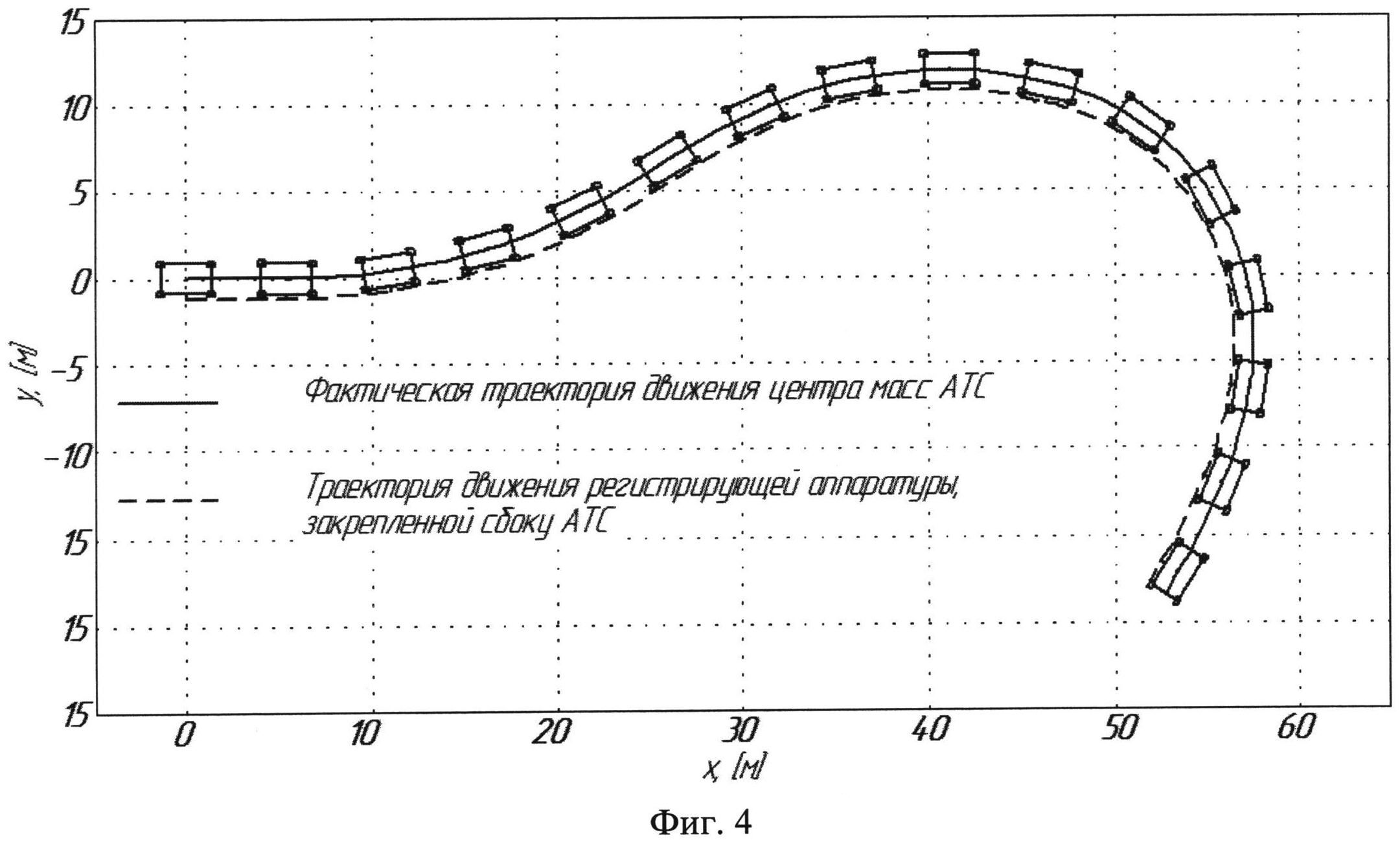
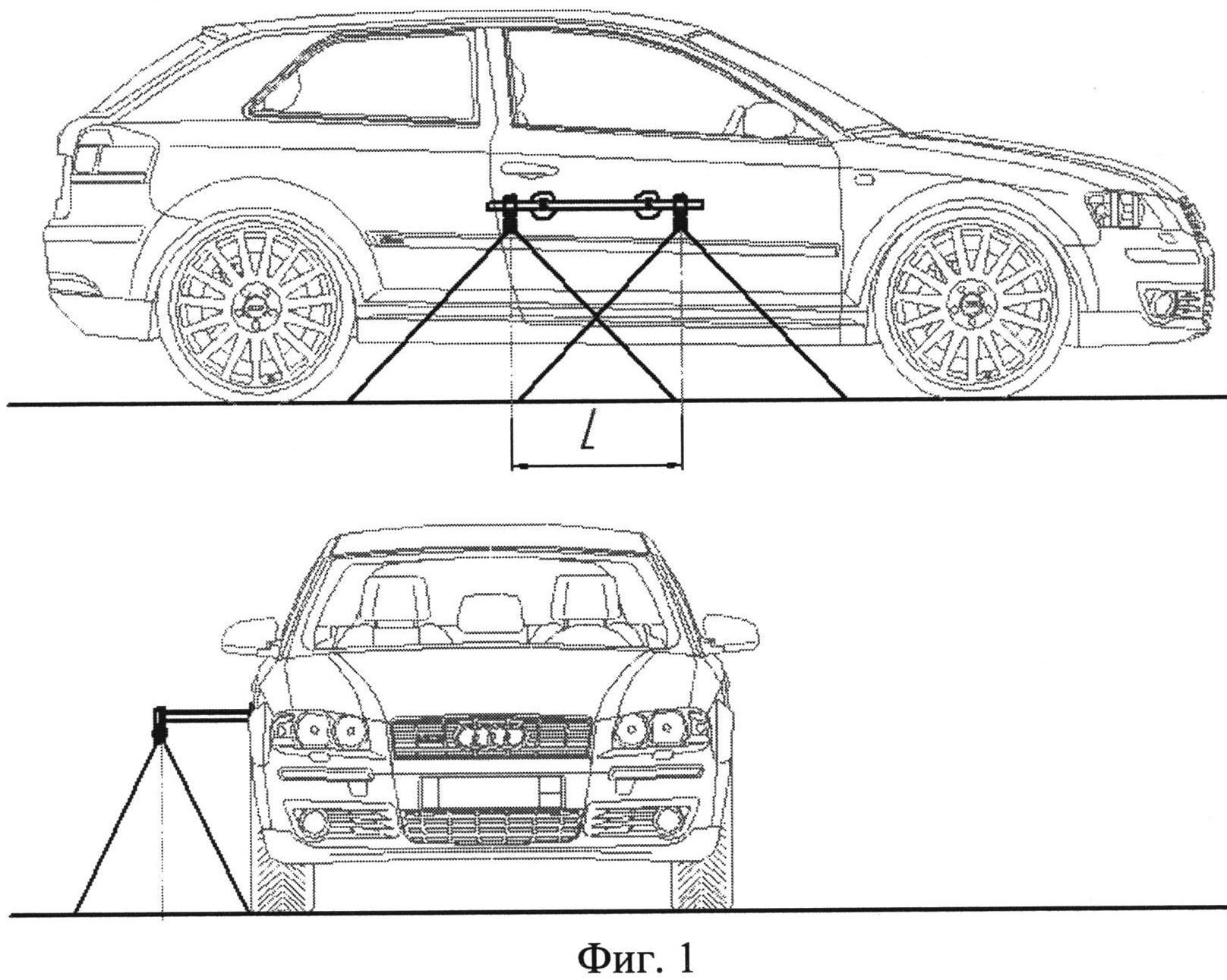
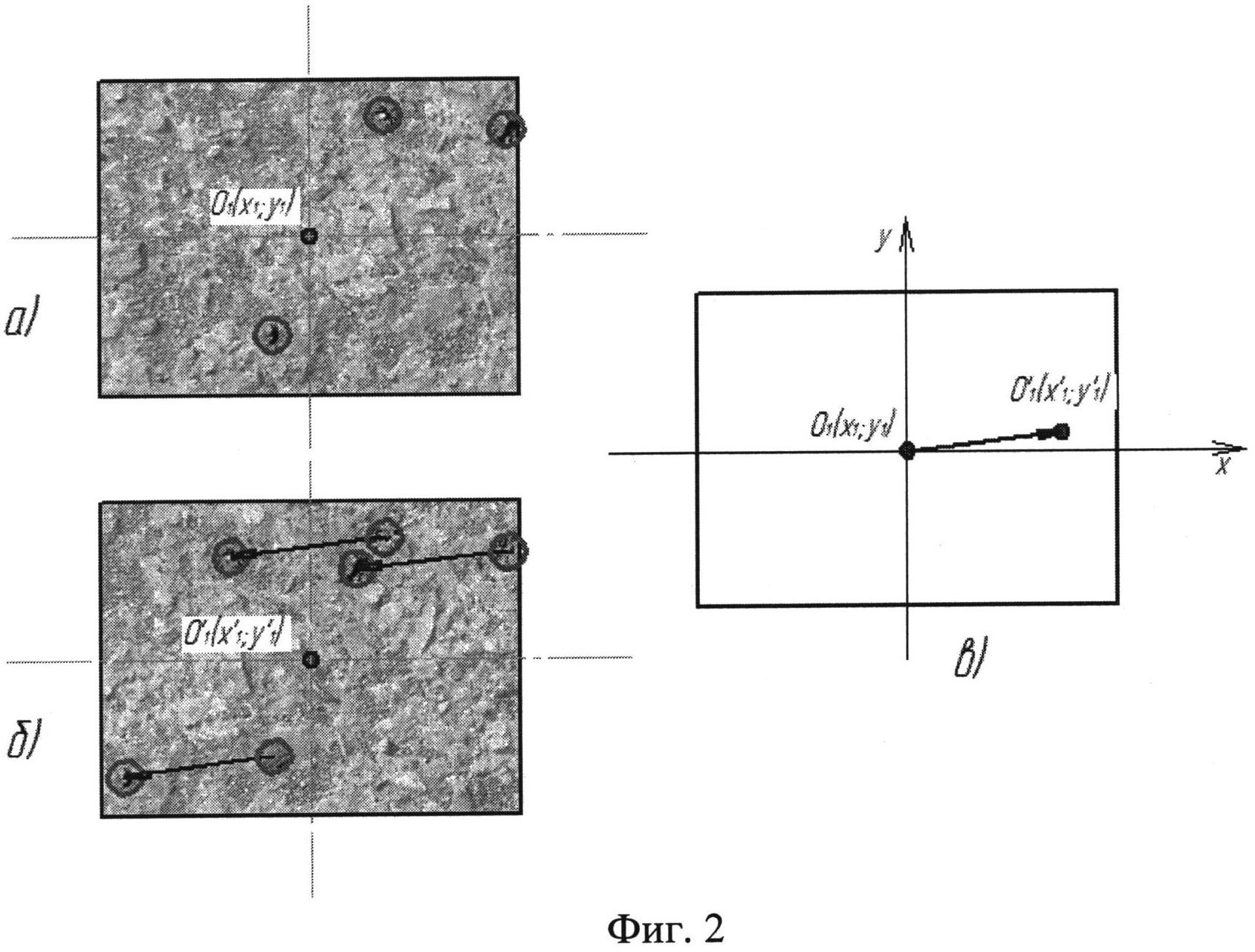
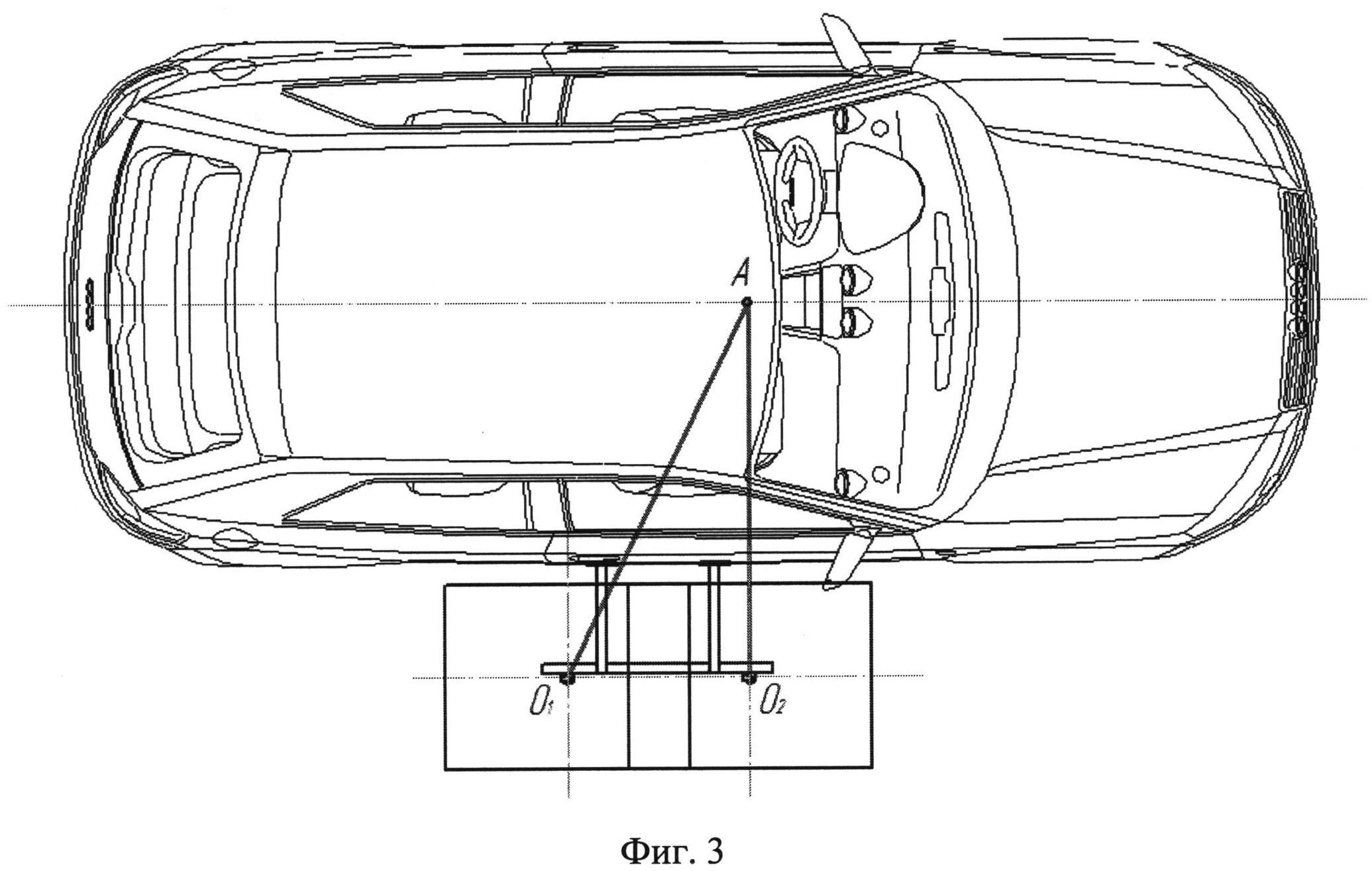
На фиг.1 представлена схема расположения регистрирующей аппаратуры на объекте (автомобиле). На фиг.2 приведен пример определения смещения первой видеокамеры относительно дорожного полотна [а) i-й кадр с выделенными характерными областями, б) кадр i+1, с указанием изменения расположения характерных областей, в) координатная плоскость с указанием перемещения видеокамеры]. На фиг.3 изображена схема расположения видеокамер, относительно центра масс АТС. На фиг.4 представлена траектория перемещения регистрирующей аппаратуры, расположенной на боковой поверхности автомобиля и фактическая траектория движения центра масс автомобиля, в случае выполнения испытательного маневра «рыболовный крюк» (методика NHTSA, США).
Заявляемый способ регистрации динамики движения объекта основан на оценке величины смещения видеокамер относительно поверхности движения с помощью распознавания перемещения характерных областей в соседних кадрах и предусматривает выполнение следующих операций.
Располагают комплект регистрирующей аппаратуры (штанга-держатель с двумя видеокамерами) на объекте, например на автомобиле, на расстоянии друг от друга с возможностью перекрытия областей съемки видеокамер и ориентируют оптические оси видеокамер на поверхность дорожного полотна (фиг.1). При необходимости отображения результатов измерения в реальном времени, в салоне транспортного средства располагают персональный компьютер и прочее вспомогательное оборудование.
Задают координаты расположения центра масс автомобиля относительно начала координат (x; y). Координаты определяют на основании данных предприятия-изготовителя, либо находят расчетным путем перед проведением испытаний. Проводят калибровку регистрирующей аппаратуры для возможности определения реальных размеров объектов в кадре и расположения видеокамер в пространстве.
Производят видеосъемку поверхности движения объекта в процессе его испытаний, начиная запись либо по команде оператора, либо с помощью распознавания определенной метки на поверхности движения. Полученные видеозаписи сохраняют на носитель информации, либо обрабатывают в реальном времени, например, с использованием модуля «opencv_video» библиотеки алгоритмов компьютерного зрения OpenCV, предназначенного для оценки оптического потока. Оценка оптического потока основана на определении величины смещения характерных областей (обычно наиболее контрастных) в кадре (фиг.2).
Координаты центра изображения, полученного первой видеокамерой (x1; y1) на первом кадре, принимают за нулевые (начало координат).
Производят поиск идентичных областей на двух соседних кадрах первой видеокамеры и затем оценивают величину перемещения данных областей по изменению координат их расположения в кадре. Для достоверности определения, оценку производят для нескольких областей в каждом кадре. После нахождения суммарного вектора перемещения областей определяют величину смещения первой видеокамеры относительно дорожного полотна и ее новые координаты ( ;
; ). Аналогично определяют величину смещения для второй видеокамеры и ее координаты (
). Аналогично определяют величину смещения для второй видеокамеры и ее координаты ( ;
; ). Исходя из полученных координат видеокамер, рассчитывают новые координаты центра масс АТС (x'; y') относительно начала координат следующим образом.
). Исходя из полученных координат видеокамер, рассчитывают новые координаты центра масс АТС (x'; y') относительно начала координат следующим образом.
Зная направление и величину смещения двух вершин треугольника O1 O2 (смещение центров изображений каждой из видеокамер относительно поверхности движения за время смены кадра), определяют смещение третьей вершины треугольника A, т.е. координаты центра масс автомобиля (фиг.3)


Далее определяют перемещение центра масс (путь) за время смены кадра по формуле

где Sx=x′-x - смещение центра масс объекта в продольном направлении;
Sy=y'-y - смещение центра масс объекта в поперечном направлении.
Затем рассчитывают скорость движения автомобиля по формуле

где  - время смены кадра, с;
- время смены кадра, с;
N - частота съемки, кадр/с.
Далее, при необходимости, определяют продольное и поперечное ускорения центра масс транспортного средства, строят графики изменения параметров движения АТС в функции от пути или от времени (продолжительности испытательного заезда), а также выполняют построение траектории движения центра масс АТС, суммируя перемещение в продольном и поперечном направлениях.
Приведем конкретный пример реализации способа.
Исходные данные:
Автомобиль - Audi S3.
Начальные координаты:
1-я видеокамера (точка O1) - (0; 0);
2-я видеокамера (точка О2) - (1,4; 0).
Центр масс (точка А) - (0,99; 1,27).
Расстояние между видеокамерами - 1,4 м.
Координаты точек на расчетном кадре:
1-я видеокамера (точка O1) - (0,441; 0,059);
2-я видеокамера (точка O2) - (1,842; 0,003).
Рассчитывают координаты центра масс АТС на кадре i+1 по (1), (2)

В результате получают координаты расположения центра масс автомобиля для расчетного кадра, относительно начала координат
A′(1,483; 1,290).
Согласно (3), определяют перемещение центра масс за время смены кадра

При скорости съемки видеокамеры равной 40 кадр/с, скорость движения центра масс автомобиля по (4) будет равна

При необходимости находят ускорение (замедление) АТС и строят графики изменения параметров от пути или от времени.
Данный способ актуален особенно при оценке параметров криволинейного движения объекта, т.к. теоретические оценки параметров движения, получаемые с помощью различных математических моделей, как правило, производятся относительно центра масс.
Например, в случае выполнения испытательного маневра «рыболовный крюк» (методика NHTSA, США), разница реально пройденного пути и пути, измеренного регистрирующей аппаратурой, расположенной на боковой поверхности АТС, составляет более 2,5% (рис.4), что весьма значимо сказывается на точности определения параметров движения АТС при испытаниях. Кроме того, данная погрешность может проявляться систематически и искажать фактические данные.
Таким образом, предлагаемый способ регистрации динамики движения объекта позволяет повысить точность оценки параметров движения путем определения фактической траектории движения его центра масс в условиях криволинейного движения.




Шпиндельный узел (варианты)
Способ получения холода
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов
Способ испытания транспортного средства (варианты)
Способ диффузионной сварки
Способ функционирования распределенных измерительно-управляющих систем
Способ угловой ориентации объекта
Фазовая радионавигационная система
Способ определения задержки сигналов навигационной спутниковой системы в ионосфере
Индукционная канальная печь
Транспортное средство для перевозки контейнеров
Газосборник алюминиевого электролизера (варианты)
Транспортное средство для транспортирования и хранения грузов
Шпиндельный узел (варианты)
Способ получения холода
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов
Способ испытания транспортного средства (варианты)
Способ диффузионной сварки
Способ функционирования распределенных измерительно-управляющих систем
Способ угловой ориентации объекта

