Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ
Вид РИД
Изобретение
Настоящее изобретение относится к способу определения положения механизмов в очистном забое при подземной разработке, а также к соответствующей системе и к предназначенной для этого видеокамере.
Из уровня техники известно использование видеокамер в горном деле для наблюдения за процессами на расстоянии или для контроля рабочего пространства внутри очистного забоя. Правда, при прежних системах с помощью видеокамеры невозможно одновременно отслеживать прямолинейность очистного забоя, регистрировать вертикальное и горизонтальное отклонение секций крепи и конвейера, автоматически контролировать ход секций крепи (выбойку, передвижку, установку) и/или следить за добычной машиной.
Задачей настоящего изобретения является создание способа и устройства для определения положения механизмов в очистном забое при подземной разработке, способных осуществить это.
Решение этой задачи достигается с помощью признаков независимых пунктов формулы изобретения.
Согласно изобретению предусмотрен процесс определения положения механизмов в очистном забое при подземной разработке, причем под механизмами понимаются секции крепи, конвейер, добычная машина или компоненты этих механизмов. Согласно изобретению вначале в области верхняка секции крепи устанавливается видеокамера, а именно, в направлении взгляда, в основном в направлении вентиляционной струи или против нее. Предпочитается направление взгляда в направлении вентиляционной струи, поскольку в этом случае загрязнение минимизировано. В очистном забое, содержащем обычно 120-200 секций крепи, из которых каждая имеет ширину 1,5-2 м, кроме того, целесообразно, чтобы каждая камера отслеживала только один участок очистного забоя, так что при наличии нескольких соответственно установленных видеокамер может автоматически контролироваться весь очистной забой.
На другой стадии технологического процесса видеокамера направляется таким образом, чтобы точка схода заснятого камерой изображения, находилась не в центре, а либо в области правого верхнего угла, либо в области левого верхнего угла, заснятого камерой изображения камеры. При этом линии, находящиеся на одной прямой, образуют наиболее длинную прямую и с помощью автоматического распознания образов можно особенно точно установить, какие механизмы находятся за пределами (желательной) прямой линии.
После соответствующей установки видеокамеры маркировки в области изображения с камеры, предусмотренные на механизмах вдоль очистного забоя, могут быть целенаправленно освещены, после чего может производиться определение положения механизмов с помощью электронной обработки маркировок, имеющихся на изображении с камеры и хорошо различимых благодаря освещению.
В случае маркировок речь может идти, например, об электрических осветительных средствах или же о рефлекторах, освещаемых электрическим осветительным средством. Освещение маркировок может изменяться по своей яркости, а также быть различного цвета. Предпочтительно, осветительные средства для освещения маркировок связаны с управлением очистным забоем, с которым соединена также электронная обработка. Таким образом, осветительные средства в поле зрения видеокамеры могут управляться целенаправленно, так чтобы различные компоненты механизмов (как то: верхняк, основа щита, составные элементы конвейера) могли распознаваться автоматически. На эти конструктивные элементы может наноситься соответствующая однозначно распознаваемая маркировка, освещение которой может управляться также периодически.
Для определения положения механизмов осуществляется электронная обработка (распознавание образов) маркировок, находящихся на изображении с камеры. Поскольку камера зафиксирована, положение точки схода по меньшей мере приближено также известно. Более точное определение точки схода может производиться путем определения точки пересечения двух линий схода. Для этого необходимо, чтобы определенные точки в определенных секциях крепи распознавались однозначно, что возможно обеспечить с помощью способа согласно изобретению. Благодаря целенаправленному освещению и известности расстояния между двумя соседними секциями крепи можно рассчитать удаление точки от камеры. При прямой направленности очистного забоя каждая точка (каждая маркировка) на изображении ожидается в определенном месте. Отклонение от этого ожидаемого места по сравнению с линией схода является отклонением в пространстве, которое может быть пересчитано с помощью коэффициента масштабирования, учитывающего перспективное сокращение расстояний между щитами на изображении с камеры. Таким образом, с помощью автоматизированного анализа изображения может определяться положение конвейера в пространстве, расстояние от щитов до конвейера, мощность (высота щитов) и положение верхняка относительно конвейера. Кроме того, может быть, например, распознано, все ли распорки угольного забоя (флипперы) заведены в секции крепи. Кроме того, можно автоматически контролировать работу выемочного агрегата. Наконец, можно контролировать ход отдельного щита, то есть можно точно и автоматически отслеживать извлечение щита из крепи, передвижку щита и правильность повторной установки верхняка щита. После установки щитов видеокамера по перемещению конвейера может также распознать, находится ли конвейер снова на прямой линии. При этом согласно изобретению с помощью соответствующих алгоритмов может быть автоматически обнаружено отклонение от желательной заданной линии, так чтобы можно было принять меры по корректировке.
Согласно другому аспекту настоящего изобретения с помощью способа согласно изобретению может быть осуществлено также автоматизированное наблюдение, при котором система управления, соединенная с видеокамерой, выбирает в зависимости от положения выемочного агрегата, видеокамеру, наилучшим образом подходящую для той или иной задачи. Положение выемочного агрегата, то есть струговой установки или валка, посредством способа согласно изобретению может реализовываться в результате анализа изображений. Альтернативно или дополнительно, то есть избыточным образом, регистрация положения может происходить, например, с использованием инфракрасной техники. С помощью избыточной регистрации положения выемочного агрегата может также дополнительно использоваться коррекция положения выемочного агрегата, определенного с помощью автоматического распознания образов. В тех случаях, когда надежность распознания положения выемочного агрегата с помощью автоматического распознания образов из-за мощного пылеобразования или форсуночного орошения не обеспечивается, избыточная регистрация положения может быть предпочтительной.
Если положение выемочного агрегата и положение отдельных видеокамер известно, могут автоматически выбираться постоянно выделяемые кадры, а именно, с одной стороны, для электронной обработки изображений, а с другой стороны, и для отображения на экране обслуживающего или контролирующего лица. При этом предпочтительными кадрами являются область щита впереди выемочного агрегата (во избежание коллизии при контроле положения распорки угольного забоя (флиппера) и/или верхняка), область выемочного агрегата (для контроля добычи), область щита позади выемочного агрегата (для контроля продвижения и подтягивания щита) и/или подвижная область конвейера (для контроля перемещения контейнера).
Согласно другому аспекту настоящее изобретение относится к системе осуществления способа вышеописанного типа, включающей по меньшей мере одну видеокамеру и соединенный с видеокамерой электронный блок управления и обработки данных, с источниками света на механизмах вдоль очистного забоя в области изображения с камеры для определения положения. С помощью электронного блока управления и обработки данных могут производиться вышеописанные распознавание и обработка изображений. С помощью блока управления могут целенаправленно подключаться и выключаться отдельные источники света вдоль очистного забоя.
Согласно предпочтительному варианту осуществления система может содержать по меньшей мере один датчик наклона, обнаруживающий наклон верхняка секции крепи. Благодаря этому возможно определение абсолютного наклона видеокамеры, закрепленной на верхняке, и облегчается определение точки схода.
Согласно другому аспекту изобретения оно относится к видеокамере, имеющей прямоугольный корпус, содержащий по меньшей мере один кабельный вывод, определяющий ось Х корпуса. В корпусе с возможностью поворота установлена камера, объектив которой направлен поперек оси Х. При этом под «поперек» не обязательно понимается направленность под 90°. Более того, достаточно, чтобы камера была направлена под углом > 45° к оси Х. Кроме того, в корпусе предусмотрена опора, с помощью которой камера после поворота корпуса на 180° вокруг горизонтально направленной оси Х приобретает под действием силы тяжести тот же наклон относительно горизонтали, что и до поворота. Другими словами, если корпус направлен таким образом, что ось Х проходит горизонтально, а затем корпус поворачивается вокруг оси Х на 180°, то камера после поворота корпуса приобретает относительно горизонтальной плоскости тот же наклон, что и до поворота.
Вышеописанная видеокамера имеет то преимущество, что она может монтироваться на верхняке щита в двух разных положениях, а кабельный вывод постоянно обращен к задней стороне секции крепи, в то время как камера обращена или в направлении вентиляционной струи, или же против направления вентиляционной струи с тем же наклоном относительно горизонтали. Таким образом, та же самая видеокамера может монтироваться на верхняке в двух разных направлениях без необходимости в повторной юстировке для достижения желательного наклона камеры относительно горизонтальной плоскости.
Может быть предпочтительно, чтобы камера поворачивалась вокруг поворотной оси, расположенной в одной плоскости с осью Х, поскольку в этом случае желательный эффект достигается даже тогда, когда объектив камеры направлен не под прямым углом к оси Х.
Согласно предпочтительному варианту осуществления камера может быть снабжена грузом, который при повороте корпуса под действием силы тяжести вызывает поворот камеры относительно корпуса.
Ниже настоящее изобретение лишь в качестве примера описывается на основе вариантов осуществления и со ссылкой на приложенные чертежи, на которых показано:
фиг.1 - очистной забой, заснятый видеокамерой при подземной разработке по способу согласно изобретению;
фиг.2 - очистной забой согласно фиг.1;
фиг.3 - видеокамера со снятой крышкой;
фиг.4 - вид блока видеокамеры согласно фиг.3 в перспективе и
фиг.5 - вид видеокамеры согласно фиг.3 в разрезе.
На фиг.1 показано изображение, заснятое видеокамерой, причем видеокамера установлена в открытом пространстве очистного забоя на верхняке на проезде как можно дальше от угольного забоя вблизи крепежных стоек секции крепи (щита). В этой области при разработке образуется меньше всего пыли, а в воздухе содержится меньше всего капель воды. Направлением взгляда, предпочтительно, является направление вентиляционной струи, поскольку в этом случае загрязнение камеры является наименьшим.
Согласно изобретению вдоль очистного забоя предусмотрены несколько видеокамер, направленных таким образом, чтобы линии, находящиеся на одной прямой, составляли на изображении наиболее длинную прямую. Это означает, что точка F схода расположена в области правого верхнего угла или же, как показано на фиг.1, в области левого верхнего угла изображения с камеры. Точное положение точки F схода достигается направлением камеры, для чего она монтируется на верхняке щита таким образом, чтобы точка схода (удаленная точка пространства) еще надежно располагалась в пределах изображения и была удалена от верхнего края изображения на предопределенную величину. Как показано на фиг.1, две (дополнительно вычерченные) линии L1 и L2 схода пересекаются в точке F схода.
На фиг.2 показан очистной забой, изображение которого показано на фиг.1, который содержит множество установленных рядом друг с другом секций 10 крепи, которые известным образом содержат двое салазок 12, 14 и верхняк 18, удерживаемые стойками 20, причем между салазками 12 и 14 находится механизм 16 шагания, соединенный с конвейером 22. На нижней стороне верхняка 18 закреплена видеокамера, которая ниже описывается более подробно. Кроме того, вдоль очистного забоя предусмотрены несколько освещаемых маркировок, которые могут индивидуально управляться блоком управления и обработки. В изображенном примере выполнения на рештаке 24 конвейера имеются маркировки М1. Другие маркировки М2 образованы лампами, установленными на верхняке других щитов, дистанцированных в очистном забое. Другие маркировки М3 установлены на основании каждого щита, а именно, предпочтительно, в центре моста над механизмом шагания. В этом месте маркировка хорошо защищена от чрезмерного загрязнения. Предпочтительным может быть также нанесение соответствующих маркировок М1 в центре каждого рештака конвейера, поскольку эта величина коррелирует с измерением перемещений в механизме шагания. В случае маркировок М1, М2 и М3 речь может идти об активно управляемых осветительных средствах или же о рефлекторах, освещаемых активно управляемыми осветительными средствами.
Для простого распознавания положения горизонта на изображении с камеры может быть предпочтительным определять посредством датчиков наклона положение верхняка, с которым соединена видеокамера. Эти датчики наклона могут либо интегрироваться в видеокамеру, либо же могут быть предусмотрены на какой-либо иной установке на верхняке щита.
Если видеокамера записывает изображение, соответствующее фиг.1, а маркировки М1, М2 и М3 предусмотрены при этом вдоль очистного забоя, то конвейер, если он расположен прямо, находится на прямой (L2). Расстояния между более удаленными отдельными щитами, выглядят на изображении более короткими. Однако поскольку действительные расстояния известны, то известно и пространственное сокращение соответствующих участков изображения. Если на изображении какая-либо точка маркировки отклоняется от линии L1, то отклонение соответствует двум координатам Х и Y с поправкой на сокращение действительного отклонения.
Используемая выше видеокамера описывается ниже согласно фиг.3-5.
На фиг.3 изображен в перспективе вид видеокамеры для осуществления вышеописанных способов, содержащая цельный прямоугольный корпус 30. Крышка на верхней стороне корпуса на фиг.3 не показана.
Корпус 30 на виде сверху выполнен примерно прямоугольным, однако по сравнению с длиной боковой стороны он имеет лишь незначительную высоту порядка 50 мм. На задней стороне корпуса 30 в изображенном примере выполнения всего предусмотрены три параллельных кабельных вывода 32, 34 и 36, которые в изображенном примере выполнения реализованы в виде штепсельных контактов и направлением своих кабельных выводов определяют направление корпуса по оси Х. Кабельные выводы, или штепсельные контакты, предусмотрены исключительно на задней стороне корпуса 30. Для обеспечения безопасности отдельных штекеров принятым в горном деле образом предусмотрены пружинные зажимы, фиксирующие штекер на его ответном штекере. Эти пружинные зажимы 38, 39 и 40 установлены внутри предохранительной дуги 42, выполненной в поперечном сечении U-образной шины, и свинченной с корпусом 30.
Кроме того, как изображено на фигурах, корпус 30 закрыт с трех сторон (сзади, справа и спереди), в то время как с четвертой стороны предусмотрено смотровое окно 44, за которым находится модуль 46 камеры. От смотрового окна 44 расходятся две заслонки 48 и 50, служащие в качестве защиты от загрязнений.
Как показано на фиг.3, на корпусе камеры закреплены несколько магнитов М, которые в изображенном положении обращены кверху и лишь немного выступают над верхней кромкой корпуса (при установленной крышке). Для закрепления корпуса на секции крепи корпус с магнитами сначала может фиксироваться на нижней стороне верхняка и устанавливаться параллельно имеющимся кромкам конструктивных элементов, пока не будет отснят желательный кадр. Если на корпус камеры предварительно нанесен клей, то он после желательной ориентировки может затвердеть, причем во время фазы затвердения корпус фиксируется магнитами. После того как клей окончательно затвердеет, корпус будет надолго зафиксирован на секции крепи.
Как показано на фиг.5, модуль 46 камеры, на котором находится электронная камера 52, установлен на корпусе 30 с возможностью поворота, а именно вокруг вала 54, поворотная ось которого проходит в плоскости X-Y (см. фиг.3) корпуса. Таким образом, при горизонтальном монтаже корпуса 30 вал 54 устанавливается горизонтально и камера 52 может поворачиваться вокруг горизонтальной оси, лежащей в одной плоскости с горизонталью и соосно направлению X-Y корпуса.
Как показано на фиг.5, объектив 53 камеры 52 расположен поперек направления Х, а направление взгляда объектива 53 составляет с направлением Y угол γВ порядка 15°. Кроме того, объектив 53 наклонен вниз относительно плоскости X-Y, если она проходит через центр объектива, на угол αВ (фиг.3), равный примерно 15°.
Поскольку модуль 46 камеры свободно поворачивается вокруг вала 54, он при горизонтальной направленности корпуса 30 перемещается в это положение поворота вниз самостоятельно и удерживается в этом положении упором, так как модуль 46 камеры снабжен грузом 56, с которым модуль камеры под действием силы тяжести поворачивается вокруг вала 54 (фиг.4).
Корпус 30 сконструирован и выполнен таким образом, что он может поворачиваться вокруг горизонтально направленной оси Х, причем затем модуль 46 камеры снова приобретает тот же наклон относительно горизонтали, как и до поворота, поскольку модуль 46 камеры, а тем самым и камера 52 под действием силы тяжести груза 56 снова занимает то же положение наклона вниз. Следовательно, видеокамера может, как показано на фиг.3, монтироваться на нижней стороне верхняка. Однако точно так же та же видеокамера может вращаться на 180° (вокруг горизонтальной оси, параллельной оси Х), причем в этом случае принципиальная ориентация кабельных выводов не изменяется. Также мало изменяется (при в остальном постоянной ориентации корпуса 30) угол γВ. Это означает, что видеокамера может также монтироваться «upside down» (верхней стороной вниз) и в обоих случаях создаются одинаковые условия. В одном случае камера принципиально обращена в направлении вентиляционной струи, а в другом случае принципиально обращена против направления вентиляционной струи.
Для обеспечения одной и той же камере обеих возможностей монтажа на корпусе в его нижней части предусмотрены дополнительные точки 60, 62 и 64 монтажа, так что при монтаже с поворотом на 180° достаточно лишь переустановить магниты М для монтажа видеокамеры в другом направлении относительно вентиляционной струи.
Как описано выше, система определения положения механизмов в очистном забое при подземной разработке содержит одну или несколько видеокамер вышеописанного типа и соединенный с видеокамерой (не показанный) электронный блок управления и обработки, с помощью которого управляются источники света на механизмах вдоль очистного забоя в области изображения (фиг.1) с камеры для определения положения. Для облегчения определения положения вдоль очистного забоя в предопределенных местах предусмотрены маркировки М1, М2 и М3 с тем, чтобы визуально маркировать для камеры положения, например, секций крепи, конвейера и/или выемочного агрегата, так чтобы блок обработки с помощью автоматического распознавания образов мог вычислить положение этих механизмов. Если обнаруживается отклонение от заданного положения, то вслед за этим путем приведения в действие секции крепи производится корректировка.
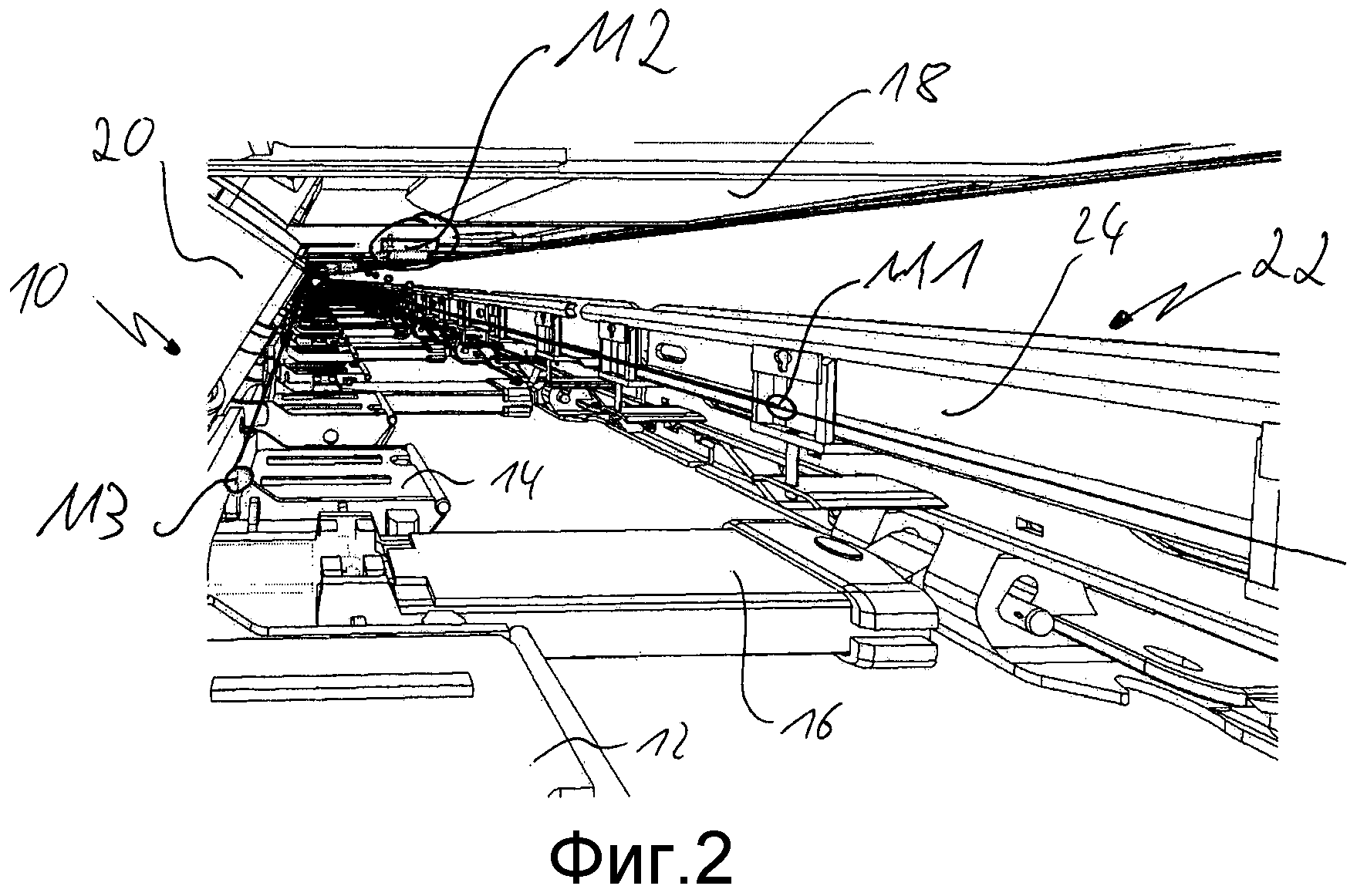
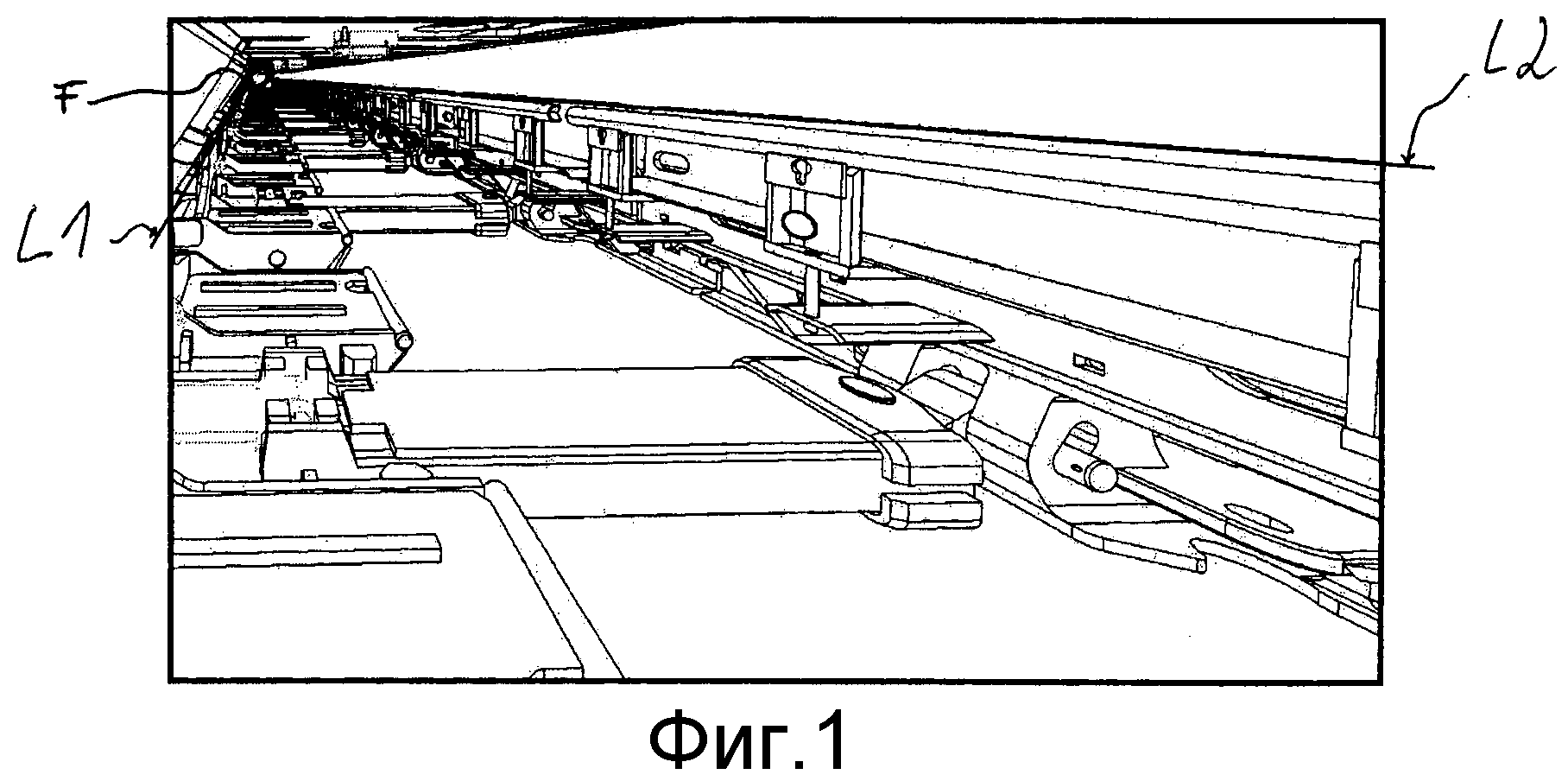
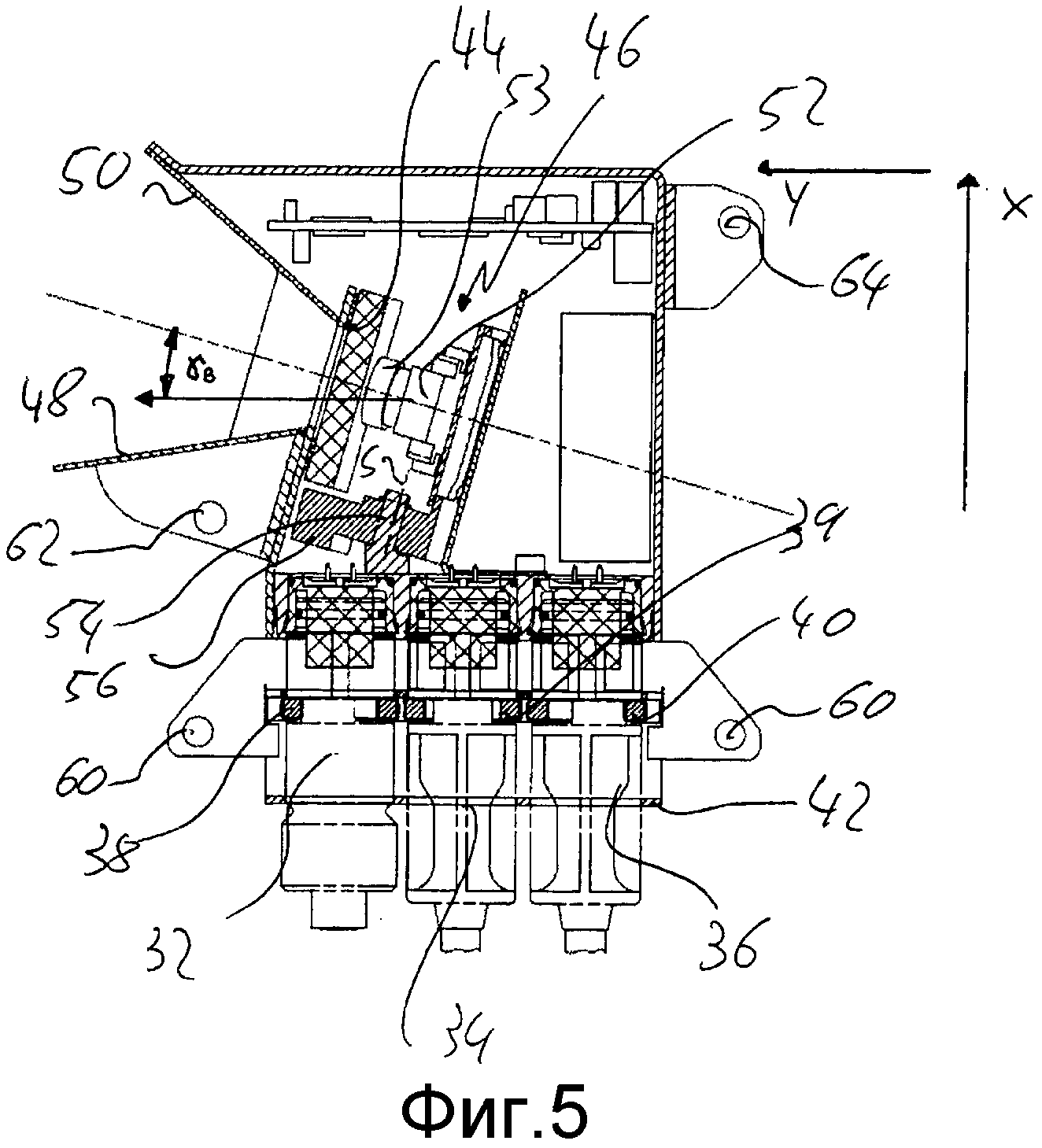
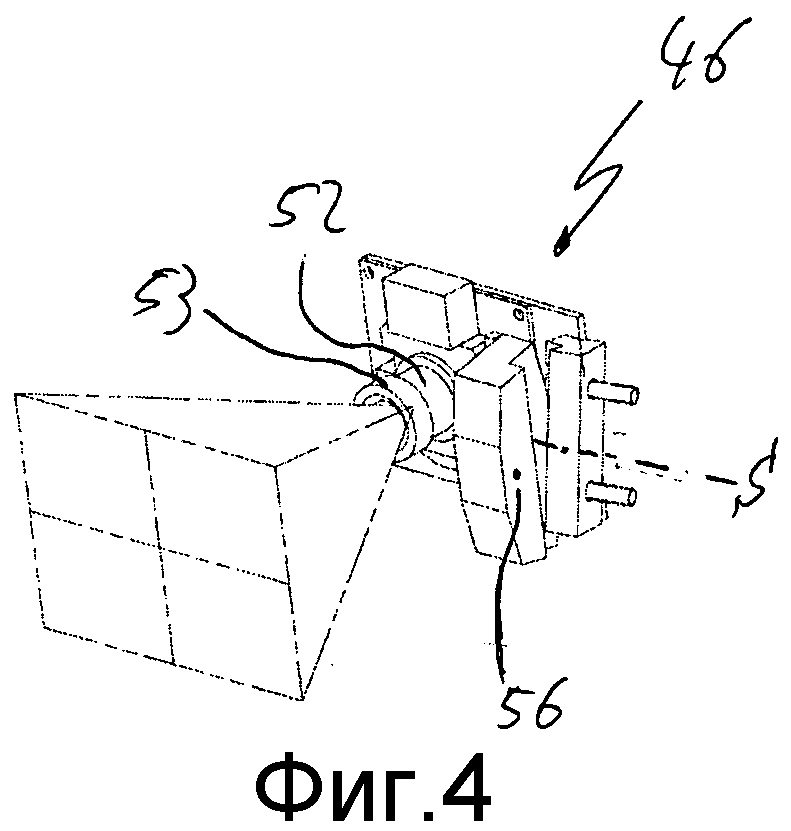
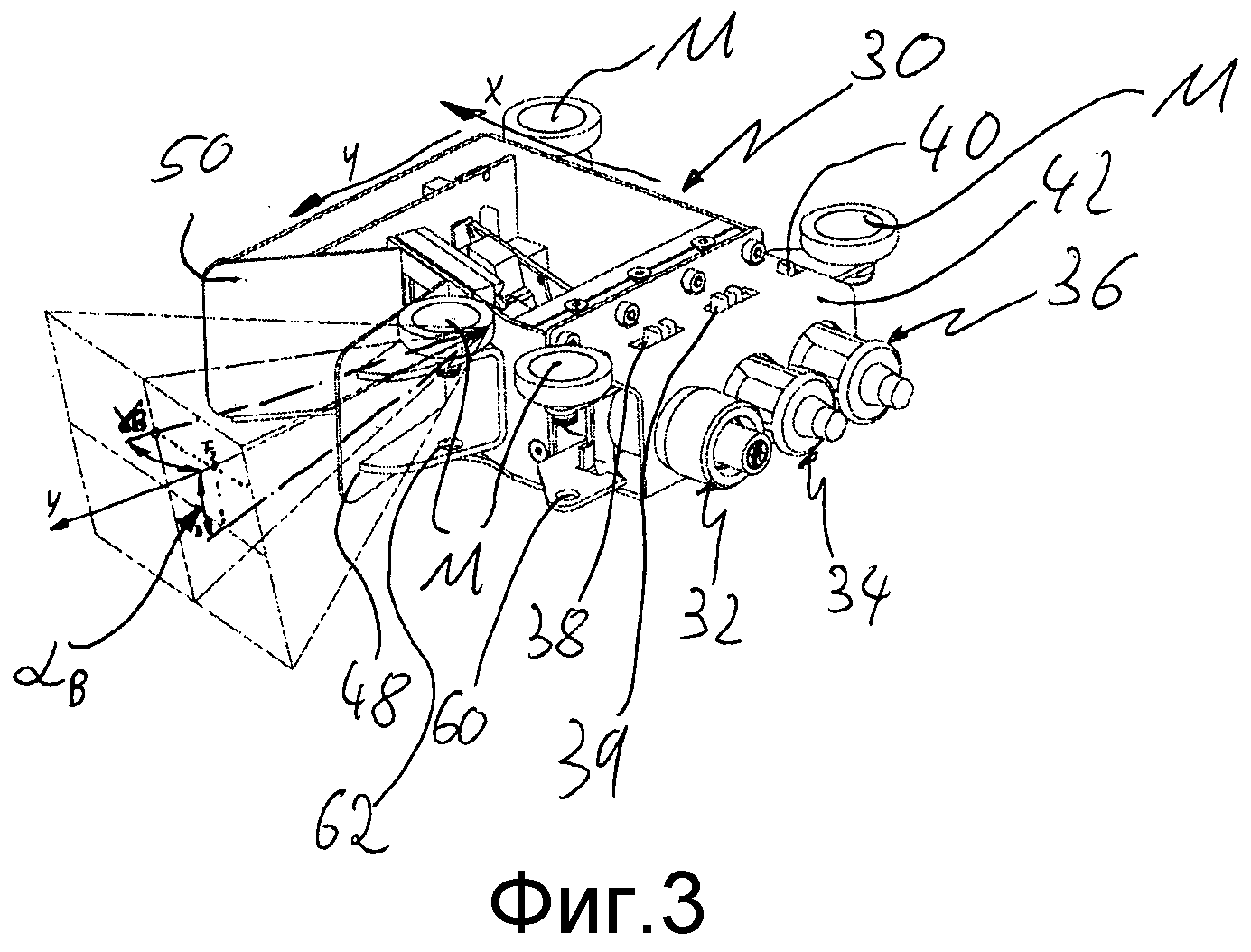
Схема расположения клапанов, а также комбинация из двух стоек крепи и насосного цилиндра для такой схемы
Клапанный патрон и управляемый обратный клапан
Схема расположения клапанов, а также комбинация из двух стоек крепи и насосного цилиндра для такой схемы
Клапанный патрон и управляемый обратный клапан

