Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ СЕЧЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретения относятся к области контрольно-измерительной техники, а именно к способам и средствам определения геометрических параметров сечения тел квазицилиндрической формы, используемых для оценки качества и диагностики состояния, преимущественно саженцев и укорененных черенков садовых культур.
При выполнении селекционных, научно-исследовательских и агротехнических работ в процессах промышленного возделывания садовых культур и получения готового продукта (черенков, саженцев) необходим инструментальный контроль, в том числе и геометрических параметров растений. Одними из показателей развитости и качества растений являются геометрические параметры сечения штамба, ветви, побега (для справки, штамб - это надземная часть растения между корнем и первой ветвью): диаметр, длина контура, площадь, индекс формы (отношение максимальных размеров в двух ортогональных направлениях). Известны способы, включающие измерения диаметра сечения тела путем совмещения двух базовых точек, расстояние между которыми определяют по шкале (механической или электронной), с соответствующими контрольными точками, расположенными на контуре контролируемого сечения тела. Эти способы реализуются такими устройствами, как штангенциркули и микрометры [ГОСТ Р 53135-2008. Посадочный материал плодовых, ягодных, субтропических, орехоплодных, цитрусовых культур и чая. Технические условия. - С.38]. Поскольку базовые точки в таких устройствах расположены на параллельных базовых плоскостях определенных размеров и образуют семейство базовых точек, то при контакте базовых плоскостей с поверхностью штамбов, ветвей или побегов контролируемых садовых культур, форма которых не является цилиндрической и может иметь конусность и неровности, образующиеся контрольные точки не лежат на контуре сечения, выбранного для контроля, что приводит к погрешностям измерений. Помимо этого контакт базовых плоскостей с поверхностью контролируемых садовых культур осуществляют с определенным измерительным усилием, что приводит к деформации контролируемых объектов и, как следствие, к погрешностям измерений из-за изменения размеров объекта. Кроме того, процедура измерений контактными способами и средствами характеризуется высокой трудоемкостью и низкой производительностью. Поэтому для контроля геометрических параметров садовых культур более предпочтительными являются бесконтактные способы и устройства, среди которых известен теневой способ и, соответственно, оптические датчики измерения диаметра сечения тела, реализующие этот способ [Патент РФ №2301968, МПК G01B 11/08, G01B 11/24. Способ контроля диаметров детали / B.C. Красильников, Е.С. Ерилин, А.Л. Фогель. - Заявка №2005132431/28; Заявлено 20.10.2005; Опубл. 27.06.2007 Бюл. №18]. Сущность теневого способа заключается в том, что диаметр сечения тела определяют по размерам тени, создаваемой контролируемым телом при освещении его широким тонким пучком света, состоящим из множества параллельных лучей. Оптический датчик, реализующий теневой способ, состоит из двух блоков - излучателя и приемника. Излучение полупроводникового лазера или светодиода коллимируется объективом. При размещении объекта контроля в области коллимированного пучка его теневое изображение сканируется линейкой ПЗС-фотоприемников или формируется телецентрической оптической системой на линейке ПЗС-фотоприемников. По положению теневых границ процессор рассчитывает диаметр объекта. Недостатком названных способа и устройства является то, что определяется только один параметр сечения тела - диаметр. Наиболее близким аналогом изобретению (прототипом) по технической сущности является способ измерения толщины сечения тела, при котором осуществляют одновременное измерение двух расстояний от двух базовых точек, расположенных с противоположных сторон от тела на заданном расстоянии друг от друга, до соответствующих контрольных точек, образующихся при пересечении линии, соединяющей базовые точки, с контуром сечения тела, и определяют размер (толщину) между этими двумя контрольными точками путем вычитания измеренных расстояний из расстояния между базовыми точками [Лысенко О. Триангуляционные датчики расстояния / Электронные компоненты, 2005. - №11. - С.111-115]. Данный способ реализован в устройстве (прототипе), содержащем два лазерных триангуляционных датчика расстояния, снабженных входами для внешнего запуска измерений и установленных на корпусе, имеющем форму скобы, на заданном расстоянии друг от друга таким образом, что их векторы измерений лежат на одной линии и направлены встречно, и выполненном с возможностью перемещения относительно контролируемого тела так, чтобы линия векторов измерений находилась в плоскости контролируемого сечения и пересекала контур сечения в двух контрольных точках [Кепнисс Д. Синхронизация сдвоенных датчиков для измерения толщины. [URL:http://www.acuitylaser.com/resources/synchronizing-laser-sensors.shtml]. Достоинствами прототипов (способа и устройства) являются: широкий диапазон измерений, наличие внутреннего и возможность внешнего запуска измерений, высокая точность и разрешающая способность, тонкий видимый луч и небольшие размеры пятна на объекте контроля, работа в сложных условиях эксплуатации, автономное питание и портативность исполнения, возможность работы с подвижными объектами различного цвета со сложной структурой поверхности. Недостатком прототипов является то, что осуществляется определение только одного параметра - расстояния между двумя контрольными точками на поверхности контролируемого объекта, а для определения расстояний между парами других контрольных точек, с целью получения информации о профиле поверхности, необходимо перемещать либо объект относительно устройства, либо наоборот, с постоянной скоростью и запускать измерения через равные интервалы времени от внутреннего генератора, что потребует больших затрат материальных и денежных ресурсов на изготовление специального механического привода. Для выполнения же селекционных, научно-исследовательских и производственных работ в промышленном садоводстве необходимы более простые и портативные приборы.
Техническим результатом изобретений - способа и устройства для его осуществления - является расширение функциональных возможностей за счет дополнительного определения координат точек контура и геометрических параметров сечения тела: длины контура, площади, максимальных размеров в двух ортогональных направлениях и их отношения - индекса формы.
Технический результат в изобретении (способе) достигается тем, что в способе определения геометрических параметров сечения тела, включающем одновременное измерение двух расстояний от двух базовых точек, расположенных с противоположных сторон от тела на заданном расстоянии друг от друга, до соответствующих контрольных точек, образующихся при пересечении линии, соединяющей базовые точки, с контуром сечения тела, и определение длины отрезка между этими двумя контрольными точками путем вычитания измеренных расстояний из расстояния между базовыми точками, длину отрезка между контрольными точками определяют для всех пар контрольных точек, образующихся при одновременном перемещении базовых точек перпендикулярно соединяющей их линии, лежащей в плоскости контролируемого сечения тела, начиная от его границы и далее через каждые одинаковые интервалы перемещения в пределах сечения, затем по полученным значениям расстояний и длин отрезков определяют координаты всех полученных контрольных точек в прямоугольной системе координат и геометрические параметры сечения тела: длину контура, площадь, максимальные размеры в двух ортогональных направлениях и их отношение - индекс формы. Для определения координат контрольных точек абсциссе первой пары контрольных точек присваивают произвольное значение, а значения абсцисс последующих пар контрольных точек получают путем прибавления значения интервала перемещения к значению абсциссы предыдущей пары контрольных точек, за ординаты первых контрольных точек пар принимают значения расстояний, измеренных от первой базовой точки до первой контрольной точки соответствующей пары, а значения ординат вторых контрольных точек пар получают путем прибавления значений длин отрезков между контрольными точками к значению ординат первых контрольных точек соответствующей пары. Геометрические параметры сечения тела определяют расчетным путем, при этом длину контура определяют как сумму длин прямых линий между всеми соседними контрольными точками на контуре, площадь определяют как сумму площадей всех элементарных трапеций, основаниями которых являются соседние параллельные отрезки между контрольными точками пар, а высотой - расстояние между этими параллельными отрезками, равное интервалу перемещения; за максимальный размер в направлении оси ординат принимают значение длины наибольшего отрезка между контрольными точками пар, а максимальный размер в направлении оси абсцисс определяют путем умножения интервала перемещения на количество этих интервалов в пределах сечения тела.
Такое выполнение способа позволяет получить координаты контрольных точек всех пар, расположенных на контуре сечения тела (штамба, ветви, побега растения округлой квазицилиндрической формы), по которым можно получить полную информацию о сечении тела: конфигурацию и длину контура, площадь, максимальные размеры в двух ортогональных направлениях и их отношение (индекс формы). Так, например, при достаточно большом количестве контрольных точек участок контура между соседними контрольными точками можно аппроксимировать прямой линией и длину этой линии вычислить по формулам аналитической геометрии, а длину контура, соответственно, как сумму длин между всеми соседними контрольными точками. А сечение тела при такой аппроксимации можно представить состоящим из трапеций, боковыми сторонами которых являются прямые линии между соседними контрольными точками на контуре, а основаниями - прямые параллельные отрезки между контрольными точками пар. Поскольку длины этих отрезков определяются при одновременном перемещении базовых точек через каждые одинаковые интервалы перемещения, то расстояние между ними одинаково и является высотой трапеций. Тогда площадь сечения можно вычислить, как сумму площадей элементарных трапеций, площадь каждой из которых равна полусумме оснований, умноженной на высоту. Другим вариантом может быть нахождение аппроксимирующих функций отдельных частей контура по координатам контрольных точек и дальнейшее вычисление длины контура и площади сечения с помощью интегрального исчисления. Конфигурация контура сечения тела может быть получена путем нанесения контрольных точек на координатную плоскость. Если за ортогональные направления выбрать направления координатных осей, то максимальный размер в направлении оси абсцисс будет равен значению интервала перемещения умноженному на количество этих интервалов (количество интервалов перемещения на единицу меньше количества измерений), а максимальный размер в направлении оси ординат - значению длины наибольшего отрезка между контрольными точками пар.
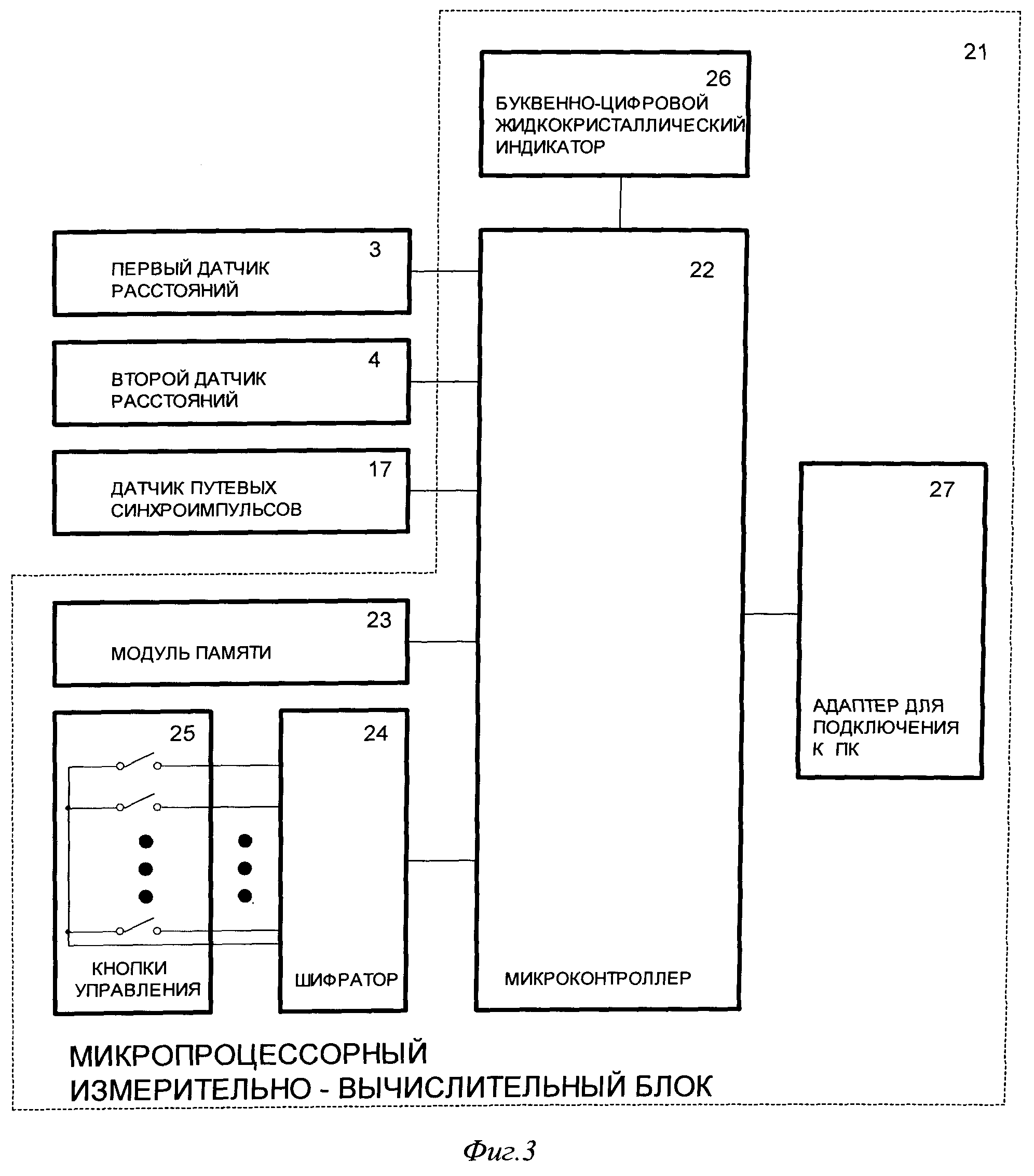
Технический результат в изобретении (устройстве) достигается тем, что в устройство для определения геометрических параметров сечения тела, содержащее два лазерных триангуляционных датчика расстояний, снабженных входами для внешнего запуска измерений и установленных на корпусе, имеющем форму скобы, на заданном регулируемом расстоянии друг от друга таким образом, что их векторы измерений лежат на одной линии и направлены встречно, и выполненное с возможностью перемещения относительно контролируемого тела так, чтобы линия векторов измерений находилась в плоскости контролируемого сечения и пересекала контур сечения в двух контрольных точках, введены элемент, контролирующий перпендикулярность перемещения устройства относительно линии векторов измерений датчиков расстояний, датчик путевых синхроимпульсов, генерирующий импульсы, запускающие измерения датчиков расстояний при достижении линией векторов измерений контура контролируемого сечения и далее через каждые одинаковые интервалы перемещения в пределах сечения, и микропроцессорный измерительно-вычислительный блок, при этом выход датчика путевых синхроимпульсов соединен со входами внешнего запуска лазерных триангуляционных датчиков расстояний и тактовым входом микропроцессорного измерительно-вычислительного блока, а выходы первого и второго лазерных триангуляционных датчиков расстояний соединены, соответственно, с первым и вторым входами микропроцессорного измерительно-вычислительного блока, который состоит из микроконтроллера, модуля памяти, шифратора, кнопок управления, буквенно-цифрового жидкокристаллического индикатора и адаптера подключения к персональному компьютеру, при этом тактовый, первый и второй входы микроконтроллера соединены, соответственно, с тактовым, первым и вторым входами микропроцессорного измерительно-вычислительного блока, третий вход подключен к модулю памяти, а четвертый вход соединен с выходом шифратора, входы которого соединены с кнопками управления, первый выход подключен к буквенно-цифровому жидкокристаллическому индикатору, а второй выход соединен с адаптером подключения к персональному компьютеру. Элемент устройства, контролирующий перпендикулярность перемещения устройства относительно линии векторов измерений датчиков расстояний, содержит источник видимого лазерного излучения типа лазерной указки, луч которого направлен перпендикулярно линии векторов измерений датчиков расстояний. Датчик путевых синхроимпульсов устройства содержит лазерный источник пучка параллельных лучей, расположенных на равном расстоянии друг от друга параллельно линии векторов измерений датчиков расстояний в плоскости, параллельной этой линии и лучу элемента устройства, контролирующего перпендикулярность перемещения устройства относительно линии векторов измерений датчиков расстояний, и линейку точечных приемников пучка параллельных лучей, формирующую на выходе датчика путевых синхроимпульсов электрический импульс при пересечении контролируемым телом каждого из этих лучей.
Такая совокупность названных признаков предлагаемого технического решения устройства позволяет, кроме определения максимального размера (квазидиаметра) между контрольными точками сечения тела, лежащими на линии векторов измерений датчиков расстояний и контуре сечения тела, совместить выполнение в одном устройстве нескольких дополнительных контрольных операций (определение конфигурации и длины контура, площади, максимальных размеров в двух ортогональных направлениях и их отношения - индекса формы) и расширить, таким образом, функциональные возможности устройства. То есть, за счет того, что в предлагаемом устройстве обеспечивается перпендикулярность его перемещения (а следовательно, и базовых точек) относительно линии векторов измерений лазерных триангуляционных датчиков, а измерения расстояний этими датчиками осуществляются с одинаковым интервалом перемещения, равным известному расстоянию между параллельными лучами датчика путевых синхроимпульсов, отрезки линий, соединяющие пары контрольных точек, отстоят друг от друга на одинаковом расстоянии, которое не зависит от скорости перемещения устройства по сравнению с синхронизацией измерений от внутреннего или внешнего генератора импульсов определенной частоты. Благодаря этому реализуется возможность представления координат контрольных точек в прямоугольной системе координат и дальнейшего вычисления геометрических параметров сечения тела измерительно-вычислительным блоком.
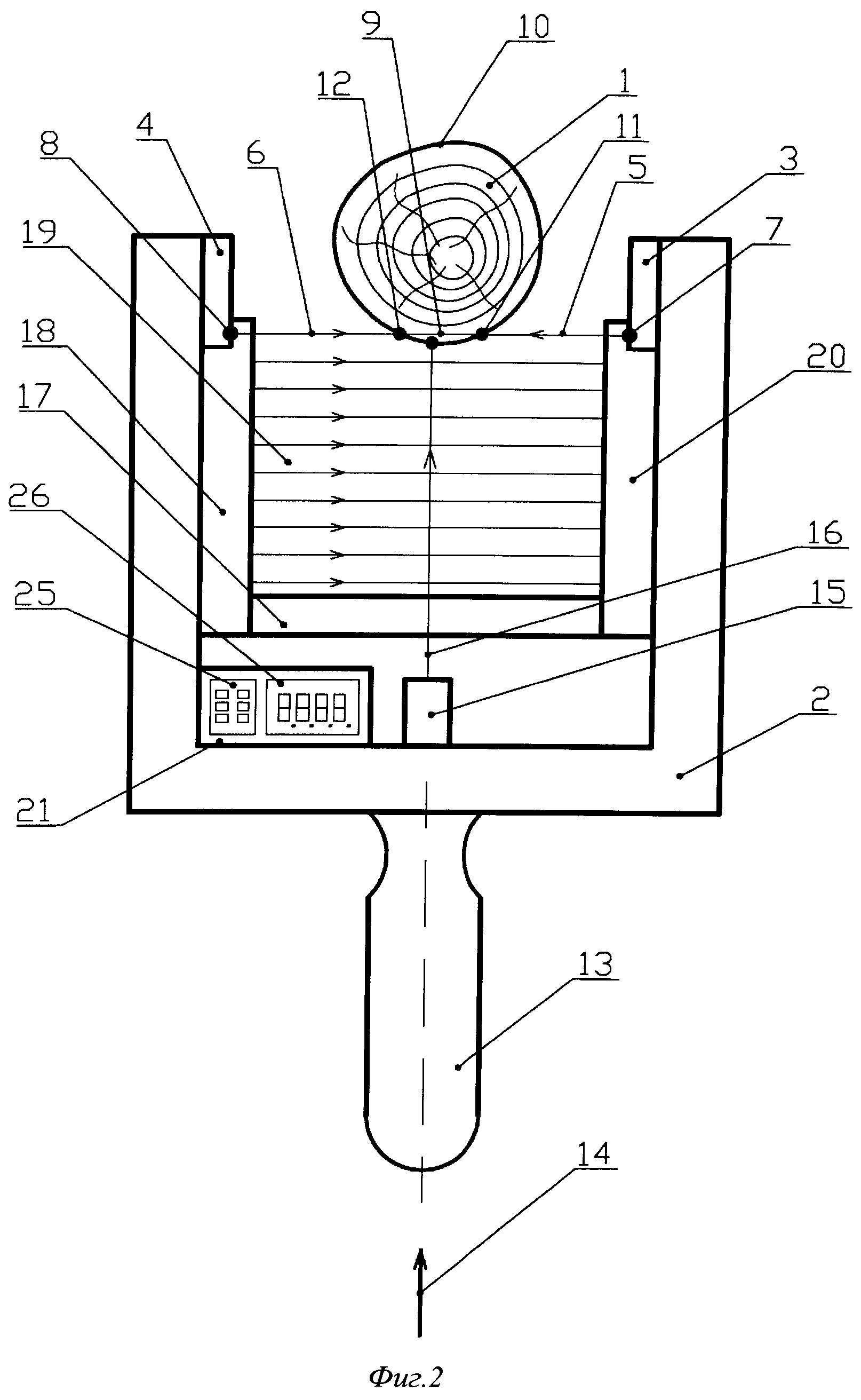
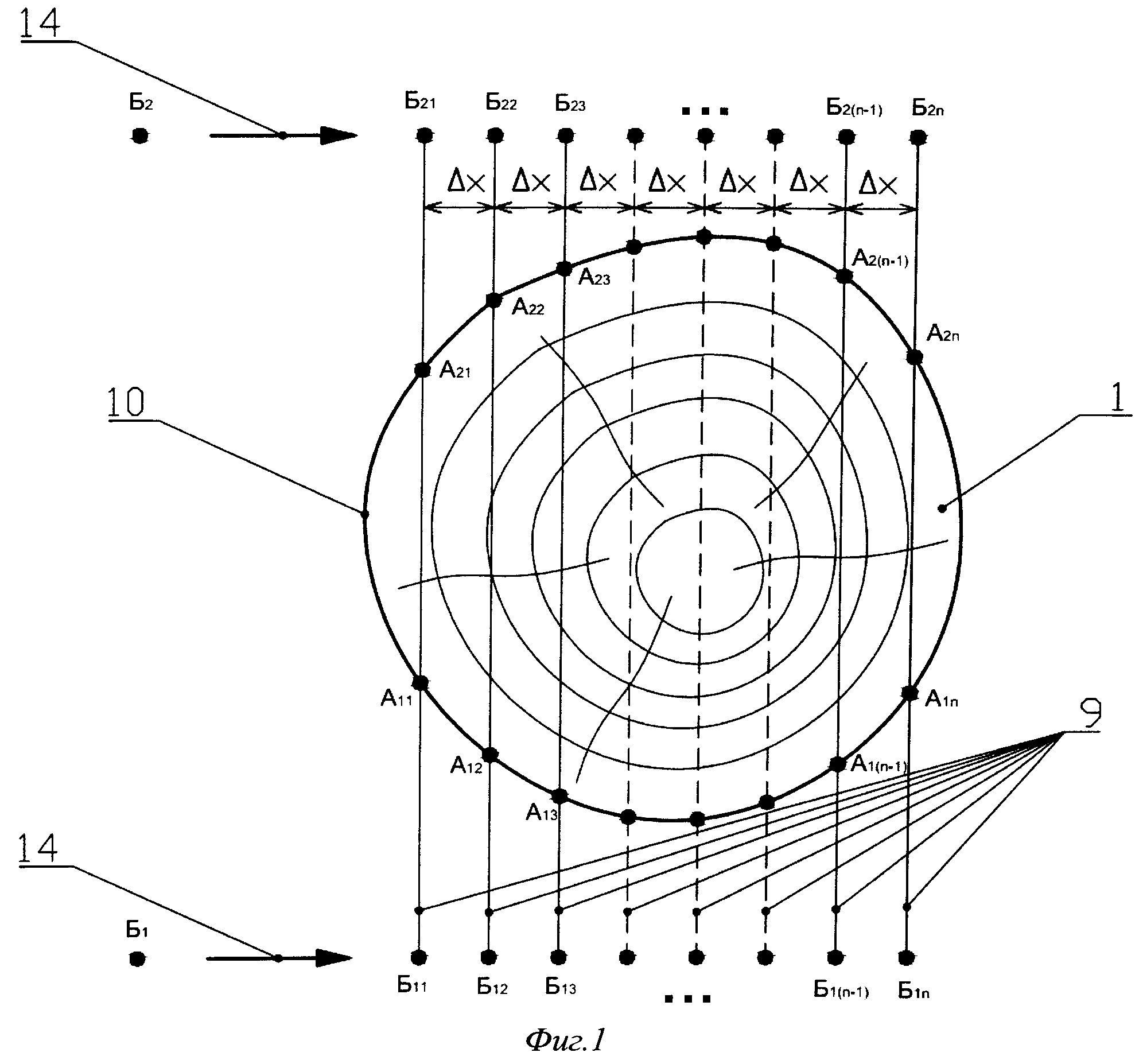
На фиг.1 изображен рисунок, поясняющий сущность способа определения геометрических параметров сечения тела, на фиг.2 - рисунок, поясняющий конструкцию устройства для определения геометрических параметров сечения тела, на фиг.3 - структурная схема устройства для определения геометрических параметров сечения тела.
Вначале приводится описание выполнения предлагаемого устройства для удобства изложения предлагаемого способа.
Устройство, реализующее способ определения геометрических параметров сечения 1 тела, например, штамба саженца садовой культуры, содержит корпус 2, выполненный в виде скобы, на концах которой на заданном регулируемом расстоянии друг от друга (в зависимости от размеров контролируемого тела) размещены, соответственно, первый и второй лазерные триангуляционные датчики расстояний 3 и 4, снабженные входами для внешнего запуска измерений. Узконаправленные лазерные лучи 5 и 6 датчиков расстояний 3 и 4 исходят, соответственно, из точек 7 и 8, являющихся базовыми точками Б1 и Б2, навстречу друг другу и лежат на одной линии 9 векторов измерений. Контролируемое тело находится между датчиками расстояний 3 и 4, при этом лазерные лучи 5 и 6 образуют на контуре 10 контролируемого сечения 1 измерительные пятна 11 и 12, являющиеся, соответственно, контрольными точками А1 и А2. Корпус 2 в средней части скобы снабжен ручкой 13 для перемещения его оператором относительно контролируемого тела. При перемещении корпуса 2 линия 9 векторов измерений находится в плоскости контролируемого сечения 1 тела. Для обеспечения и контроля перпендикулярности направления перемещения, указанного стрелкой 14, относительно линии 9 векторов измерений, корпус 2 снабжен источником 15 видимого лазерного излучения типа лазерной указки, луч 16 которого направлен перпендикулярно линии 9 векторов измерений. Для запуска измерений датчиков расстояний 3 и 4 на корпусе 2 установлен датчик 17 путевых синхроимпульсов, генерирующий импульсы при достижении линией 9 векторов измерений контура 10 контролируемого сечения 1 и далее через каждые одинаковые интервалы перемещения ΔX в пределах сечения 1. Датчик 17 путевых синхроимпульсов содержит лазерный источник 18 пучка 19 тонких параллельных лучей, расположенных на равном расстоянии ΔX друг от друга параллельно линии 9 векторов измерений в плоскости, параллельной этой линии 9 и лучу 16, и линейку 20 точечных приемников лучей пучка 19. Выход датчика 17 путевых синхроимпульсов соединен со входами внешнего запуска датчиков расстояний 3 и 4. Для определения длины отрезков между парами контрольных точек A1n и A2n, где n - порядковый номер положения контрольных точек при перемещении измерительных пятен 11 и 12, координат контрольных точек A1n и A2n и геометрических параметров сечения 1 тела (длины контура, площади, максимальных размеров в двух ортогональных направлениях X и Y, индекса формы) устройство содержит также микропроцессорный измерительно-вычислительный блок 21, состоящий из микроконтроллера 22, модуля памяти 23, шифратора 24, кнопок управления 25, буквенно-цифрового жидкокристаллического индикатора 26 и адаптера 27 подключения к персональному компьютеру, при этом тактовый, первый и второй входы микроконтроллера 22 соединены, соответственно, с тактовым, первым и вторым входами микропроцессорного измерительно-вычислительного блока 21, третий вход подключен к модулю памяти 23, а четвертый вход соединен с выходом шифратора 24, входы которого соединены с кнопками управления 25, первый выход микроконтроллера 22 подключен к буквенно-цифровому жидкокристаллическому индикатору 26, а второй выход соединен с адаптером 27 подключения к персональному компьютеру. Тактовый, первый и второй входы микропроцессорного измерительно-вычислительного блока 21 подключены, соответственно, к выходам датчика 17 путевых синхроимпульсов, первого и второго датчиков расстояний 3 и 4.
Устройство для определения геометрических параметров сечения тела работает следующим образом. Перед началом измерений с помощью регулировок (на фигурах не показаны) устанавливается расстояние между точками 7 и 8 датчиков расстояний 3 и 4 (или, что то же самое, расстояние между базовыми точками Б1 и Б2), исходя из размеров контролируемого тела, а кнопками управления 25 устройство включается и переводится в режим «Программирование» для ввода атрибутов объекта и режима измерений в модуль памяти 23 посредством шифратора 24 и под управлением программы микроконтроллера 22: даты; порядкового номера и наименования тела; значения расстояния между точками 7 и 8 датчиков расстояний 3 и 4, соответствующего расстоянию между базовыми точками Б1 и Б2; значения расстояния ΔX между параллельными лучами пучка 19 лазерного источника 18. Для получения исходных данных для последующего определения геометрических параметров сечения тела, после ввода атрибутов объекта и режима измерений, кнопками управления 25 устройство переводится в режим «Работа» и с помощью ручки 13 перемещается оператором в сторону контролируемого тела в направлении стрелки 14, при этом для обеспечения перпендикулярности линии 9 векторов измерений и направления перемещения, обозначенного стрелкой 14, луч 16 источника 15 видимого лазерного излучения направляется на контролируемое тело так, чтобы его пятно оставалось примерно в центре поверхности тела. При пересечении поверхностью тела первого луча пучка 19 выходным сигналом датчика 17 путевых синхроимпульсов запускается первое измерение датчиками расстояний 3 и 4, инициируется программа вычисления длины отрезка между контрольными точками A1n и A2n, микроконтроллера 22 и первая ячейка модуля памяти 23, в которую заносятся, соответственно, значения расстояний от точки Б11 до точки А11 и от точки Б21 до точки А21, а также вычисленное значение длины отрезка между контрольными точками A11 и A21, как разность расстояния между базовыми точками Б1 и Б2 и расстояний от точки Б11 до точки A11 и от точки Б21 до точки А21 (здесь вторая цифра в индексе указывает порядковый номер положения точек при перемещении устройства). При дальнейшем перемещении устройства, а значит и базовых точек Б1 и Б2, на интервал размером ΔX, поверхность тела пересекает второй луч пучка 19, запускается второе измерение датчиками расстояний 3 и 4 и вторая ячейка модуля памяти 23, в которую заносятся, соответственно, значения расстояний от точки Б12 до точки А12, от точки Б22 до точки А22 и значение длины отрезка между точками А12 и А22. Описанный процесс продолжается до тех пор, пока лазерные лучи 5 и 6 датчиков расстояний 3 и 4 попадают на контур 10 контролируемого сечения 1. Об окончании процесса свидетельствует выход линии 9 векторов измерений за пределы контролируемого сечения 1, при этом включается специальный световой или звуковой индикатор (на фигурах не показаны). Для определения геометрических параметров сечения 1 тела, после получения исходных данных в режиме «Работа», кнопками управления 25 устройство переводится в режим «Обработка», в котором по исходным данным (серии n пар значений расстояний от точек Б1n до точек A1n и от точек Б2n до точек A2n, а также серии n значений длин отрезков между контрольными точками A1n и A2n) с помощью соответствующих программ микропроцессорным измерительно-вычислительным блоком 21 производится вычисление и запоминание в модуле памяти 23 координат всех 2n контрольных точек и геометрических параметров сечения 1 тела: длины контура, площади, максимальных размеров в двух ортогональных направлениях и их отношения - индекса формы. Для просмотра числовых значений параметров сечения 1 тела на буквенно-цифровом жидкокристаллическом индикаторе 26 кнопками управления 25 устройство переводится в режим «Индикация». Для вывода координат контрольных точек и параметров сечения 1 тела на внешний персональный компьютер через адаптер 27 с целью создания отчета и получения графического изображения контура сечения тела кнопками управления 25 устройство переводится в режим «Передача».
Способ определения геометрических параметров сечения 1 тела с помощью вышеописанного устройства реализуется в последовательности действий, изложенной ниже.
В устройстве для определения геометрических параметров сечения тела, в котором предварительно установлено необходимое расстояние между точками 7 и 8 датчиков расстояний 3 и 4 (или, что то же самое, расстояние между базовыми точками Б1n и Б2n, где n - порядковый номер положения базовых точек при их перемещении) и введены в модуль памяти 23 атрибуты объекта и режима измерений, кнопками управления 25 инициируют режим «Работа». Затем перемещают устройство так, чтобы контролируемое тело попадало в область между датчиками расстояний 3 и 4, а точки 7 и 8 (базовые точки Б1 и Б2) перемещались перпендикулярно соединяющей их линии 9 векторов измерений в направлении стрелки 14, которое принимают за X. При пересечении контролируемым телом первого луча пучка 19 посредством датчика 17 путевых синхроимпульсов запускают первую пару измерений датчиками расстояний 3 и 4 и первую ячейку модуля памяти 23 и получают, соответственно, пару значений расстояний от точки Б11 до точки А11 (измерительное пятно 11 на контуре 10) и от точки Б21 до точки А21 (измерительное пятно 12 на контуре 10), а также вычисленное значение длины отрезка между контрольными точками А11 и A21, как разность расстояния между базовыми точками Б1 и Б2 и расстояний от точки Б11 до точки А11 и от точки Б21 до точки А21 (здесь вторая цифра в индексе указывает порядковый номер положения точек при перемещении устройства). При дальнейшем перемещении устройства, а значит и базовых точек Б1 и Б2, на интервал размером ΔX, поверхностью контролируемого тела пересекают второй луч пучка 19, а датчиком 17 путевых синхроимпульсов запускают вторую пару измерений датчиками расстояний 3 и 4 и вторую ячейку модуля памяти 23, в которой запоминают, соответственно, значения расстояний от точки Б12 до точки А12, от точки Б22 до точки А22 и значение длины отрезка между точками А12 и А22. Перемещение устройства продолжают до тех пор, пока на контуре 10 образуются измерительные пятна 11 и 12, в результате чего получают значения результатов n серий измерений и вычислений в модуле памяти 23. При этом линии, соединяющие пары контрольных точек, представляют собой семейство равноотстоящих параллельных хорд, длины которых равны вычисленным длинам отрезков между парами контрольных точек. Координаты всех 2n контрольных точек и геометрические параметры сечения тела вычисляют и запоминают в модуле памяти 23 в режиме «Обработка» с помощью соответствующих программ микропроцессорного измерительно-вычислительного блока 21. Координаты 2n контрольных точек получают следующим образом. Абсциссе первой пары контрольных точек присваивают произвольное, например нулевое, значение, а значения абсцисс последующих пар контрольных точек получают путем прибавления значения интервала перемещения (расстояния ΔX между параллельными лучами пучка 19 лазерного источника 18) к значению абсциссы предыдущей пары контрольных точек. За ординаты первых контрольных точек каждой пары принимают значения расстояний, измеренных от первой базовой точки до первой контрольной точки соответствующей пары. За ординаты вторых контрольных точек пар принимают значения сумм ординат первых контрольных точек и длин отрезков между первой и второй контрольными точками соответствующей пары. Геометрические параметры сечения тела получают следующим образом. По формуле аналитической геометрии для длины отрезка, с известными координатами его концов, определяют длины прямых линий между всеми соседними контрольными точками на контуре, а их сумму принимают за длину контура сечения тела. При определении площади сечения тела исходят из того, что фигуры, заключенные между отрезками прямых линий, соединяющих контрольные точки пар, являются трапециями при достаточно большом количестве контрольных точек. Площадь каждой трапеции вычисляют как произведение полусуммы оснований на высоту. Длины оснований известны и равны вычисленным длинам отрезков, соединяющих контрольные точки пар. Высоты всех трапеций одинаковы и равны интервалу перемещения - расстоянию ΔX между параллельными лучами пучка 19 лазерного источника 18. Максимальный размер в направлении оси ординат определяют путем сравнения вычисленных значений длин отрезков, соединяющих контрольные точки пар, и выбора из них наибольшего, а максимальный размер в направлении оси абсцисс вычисляют как произведение интервала перемещения на количество интервалов в пределах сечения тела, которое равно (n-1), где n - количество пар измерений. Индекс формы вычисляют как отношение полученных значений максимальных размеров в ортогональных направлениях (большего к меньшему). Просмотр числовых значений параметров сечения 1 тела осуществляют на буквенно-цифровом жидкокристаллическом индикаторе 26, для этого кнопками управления 25 устройство переводят в режим «Индикация». Для создания отчета и получения графического изображения контура сечения 1 тела кнопками управления 25 устройство переводят в режим «Передача» и выводят координаты контрольных точек и параметры сечения 1 тела на внешний персональный компьютер через адаптер 27.
Для осуществления изобретений могут быть использованы следующие компоненты:
датчики LS5 НПП «ПРИЗМА» [URL:http://www.prizmasensors.ru] - в качестве лазерных триангуляционных датчиков расстояний 3 и 4;
лазерный излучатель пучка тонких параллельных лучей и фотоприемная линейка от оптического микрометра, например, optoCONTROL-1200/90 фирмы MICRO-EPSILON [URL:http://www.micro-epsilon.de], РФ651, РФ656 фирмы РИФТЭК (Беларусь) [URL:http://www.riftek.com] или BGL фирмы BAL-LUFF [URL:http://www.balluff.com] - для датчика 17 путевых синхроимпульсов;
лазерный прицел или модуль [URL:http://www.miniinthebox.com] - для элемента, контролирующего перпендикулярность перемещения устройства относительно линии векторов измерений датчиков расстояний 3 и 4;
микросхема PIC16F876 - для микроконтроллера 22;
микросхема К555ИВ1 - для шифратора 24;
микросхема FM24C64 - для модуля памяти 23;
индикатор компании Fordata (16×2, светодиодная подсветка) с управляющим ядром на микроконтроллере SunPlus780D - для буквенно-цифрового жидкокристаллического индикатора 26.
Прибор для измерения усилия раздавливания ягод
Прибор для измерения усилия отрыва ягод
Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях
Прибор для определения прочностных характеристик ягод
Способ определения угла опережения впрыска топлива двигателя внутреннего сгорания и устройство для его осуществления
Шкаф искусственного климата
Устройство для определения геометрических параметров растений
Способ определения качества мяса
Устройство для измерения диаметра
Способ диагностики срезанных зелёных черенков для прогнозирования их укореняемости
Прибор для измерения усилия раздавливания ягод
Прибор для измерения усилия отрыва ягод
Способ управления агрегатом защиты растений при спутниковой навигации на сельскохозяйственных полях
Прибор для определения прочностных характеристик ягод
Способ определения угла опережения впрыска топлива двигателя внутреннего сгорания и устройство для его осуществления
Шкаф искусственного климата
Устройство для определения геометрических параметров растений
Способ определения качества мяса
Устройство для измерения диаметра
Способ диагностики срезанных зелёных черенков для прогнозирования их укореняемости

