Результат интеллектуальной деятельности: СПОСОБ ДИНАМИЧЕСКОЙ КАЛИБРОВКИ УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА
Вид РИД
Изобретение
Изобретение относится к средствам для ультразвукового (УЗ) дефектоскопического контроля протяженных объектов, в частности, изделий листового. сортового и фасонного проката, включая железнодорожные и иные рельсы.
УЗ-дефектоскопы требуют периодической калибровки, которую традиционно осуществляют с использованием стандартных образцов (патентные документы RU 124397 U1, SU 1663534 А1). Однако калибровка по стандартным образцам не способна обеспечить поддержание высокого качества настройки чувствительности УЗ-дефектоскопа в движении при контроле протяженных объектов контроля из-за того, что при этом не учитывается поглощение и рассеивание УЗ-волн в объекте контроля в текущий момент времени, изменение условий контроля. Кроме того, задавая определенный уровень срабатывания (браковочный уровень) при настройке на стандартном образце, не учитывают отличие реальных объектов контроля от образца, что может привести не только к перебраковке, но, и что более опасно, к пропуску серьезного дефекта.
Задачей является предотвращение перебраковки или пропуска опасного дефекта в процессе УЗ-контроля.
Обеспечиваемый настоящим изобретением технический результат заключается в повышении точности задания порогового уровня срабатывания УЗ-дефектоскопа в процессе контроля.
Данный технический результат достигается благодаря тому, что способ динамической калибровки УЗ-дефектоскопа, содержащего рядный блок электроакустических преобразователей, первый из которых является генератором УЗ-излучения, а последующий преобразователь или преобразователи являются приемниками УЗ-излучения, характеризуется тем, что пороговый уровень срабатывания дефектоскопа задают исходя из текущего значения амплитуды опорного сигнала, излучаемого зеркально по отношению к основному зондирующему сигналу и представляющего собой остаточное УЗ-излучение генератора в текущем такте или принудительное УЗ-излучение генератора в дополнительном такте.
В частном случае пороговый уровень срабатывания дефектоскопа определяют по следующему выражению:

где DS - порог регистрации амплитуды эхо-сигналов от дефектов;
RS - текущее значение амплитуды опорного сигнала:
K - коэффициент пропорциональности между амплитудами опорного сигнала и эхо-сигнала от дефекта.
В другом частном случае формируют вспомогательный тестовый сигнал путем излучения генератором поверхностной УЗ-волны в направлении приемника с частотой, кратной рабочей зондирующей частоте генератора. При этом если отсутствует регистрация опорного сигнала, но зарегистрирован тестовый сигнал, то используют ранее полученное значение опорного сигнала или принимают решение о неконтролепригодности данного участка для высокоскоростного контроля в силу высокого износа рельса или большого затухания и рассеивания УЗ по различным причинам. При отсутствии регистрации тестового сигнала делают вывод о невозможности продолжения контроля.
Изобретение поясняется следующими графическими материалами.
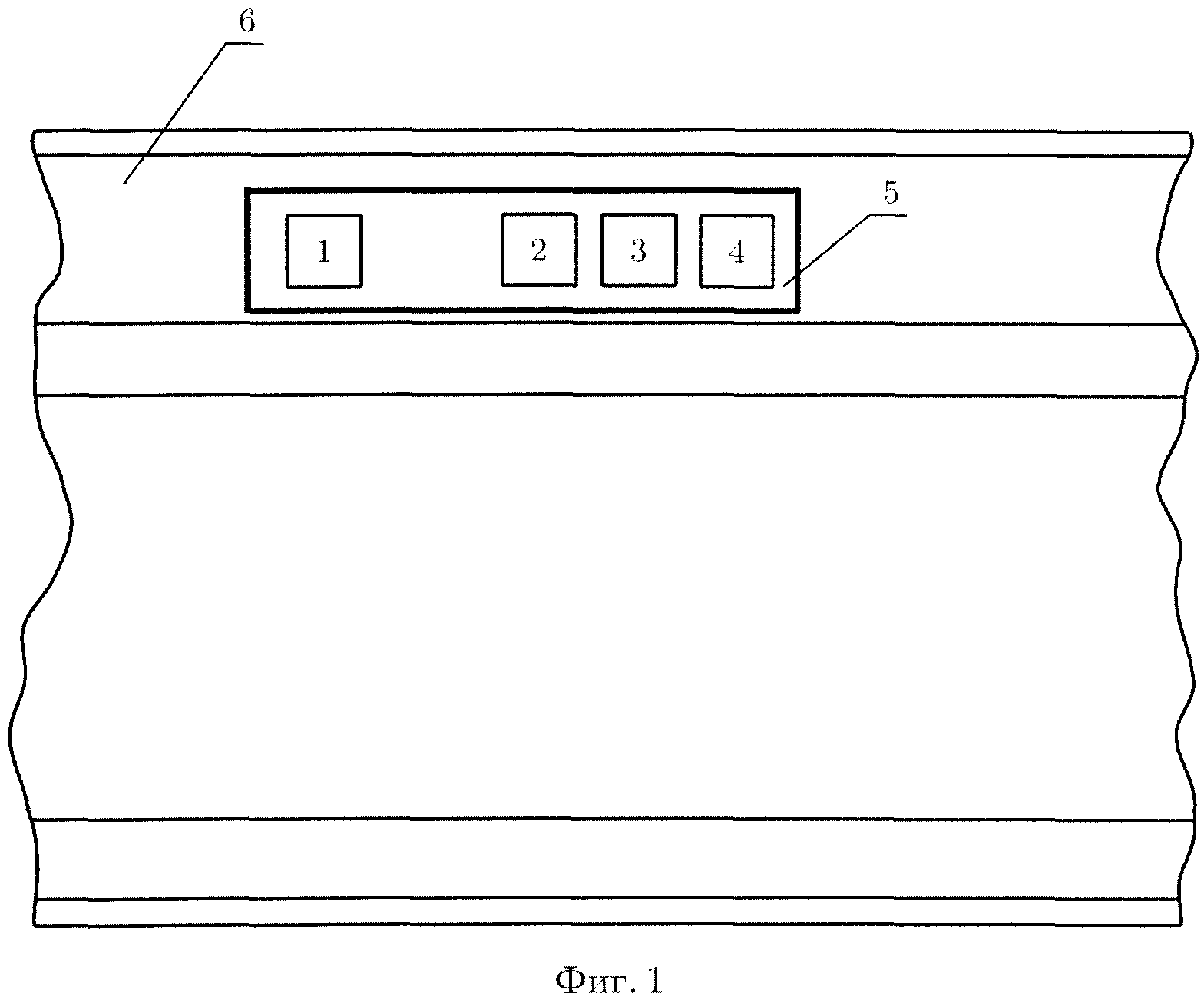
Фиг.1-5: мультитандемная схема размещения электроакустических преобразователей на железнодорожном рельсе.
Фиг.6: показан продольный дефект в виде грубых растрескиваний в головке рельса, блокирующий УЗ-луч в ходе зондирования.
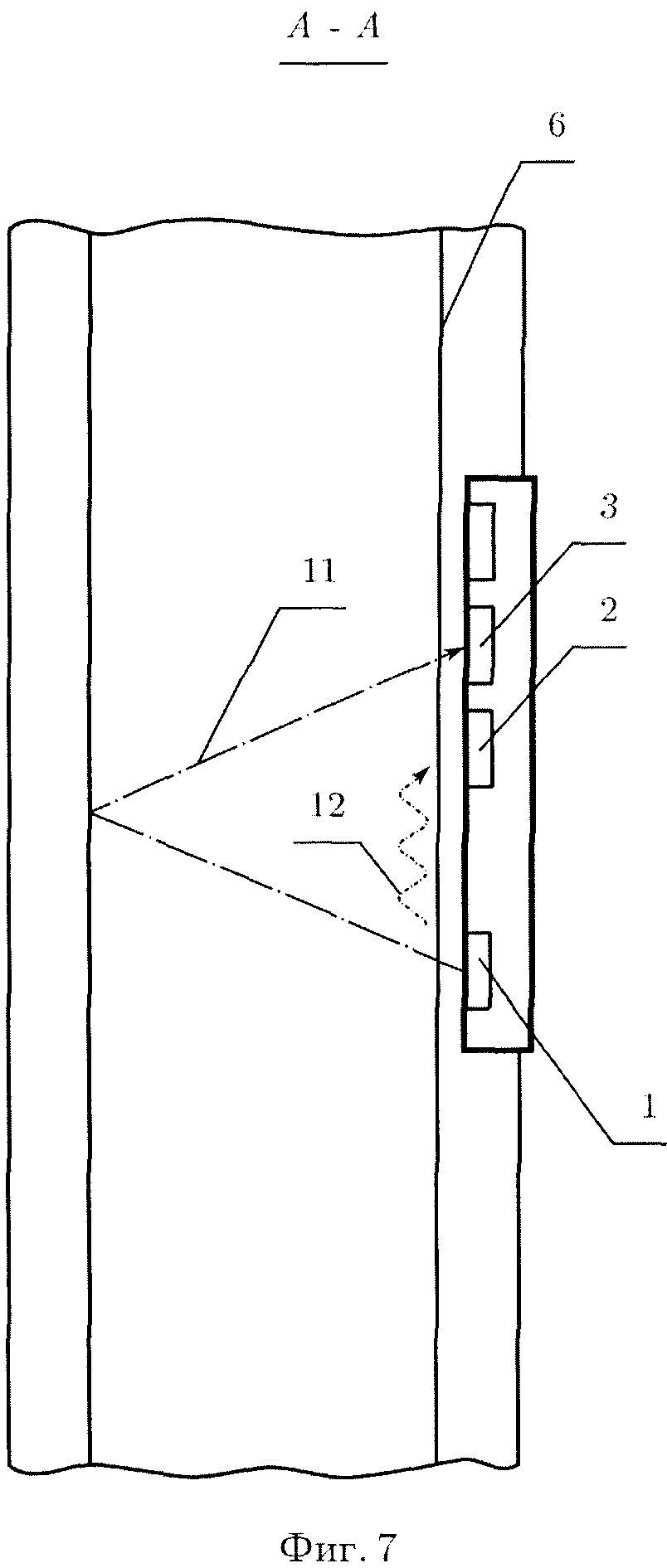
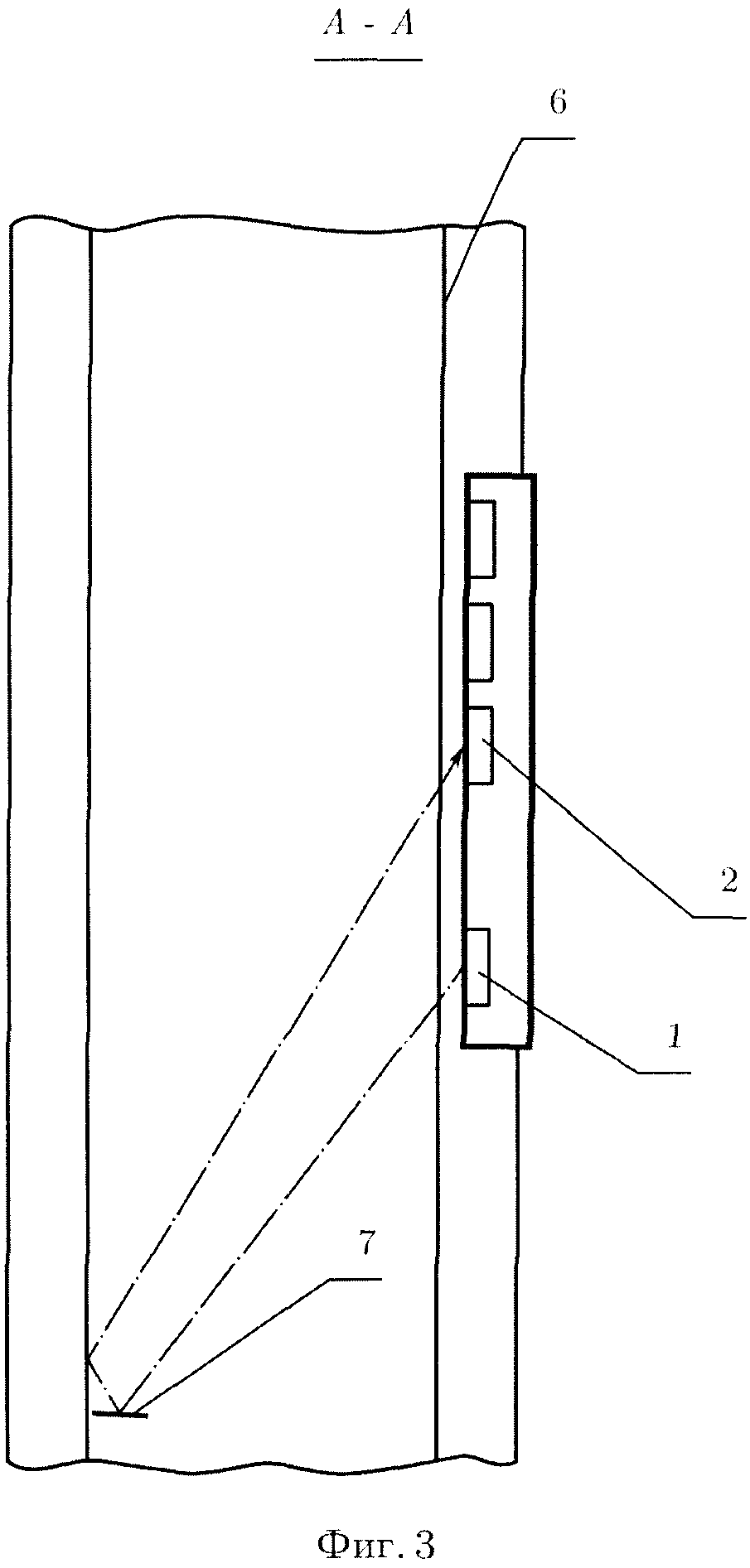
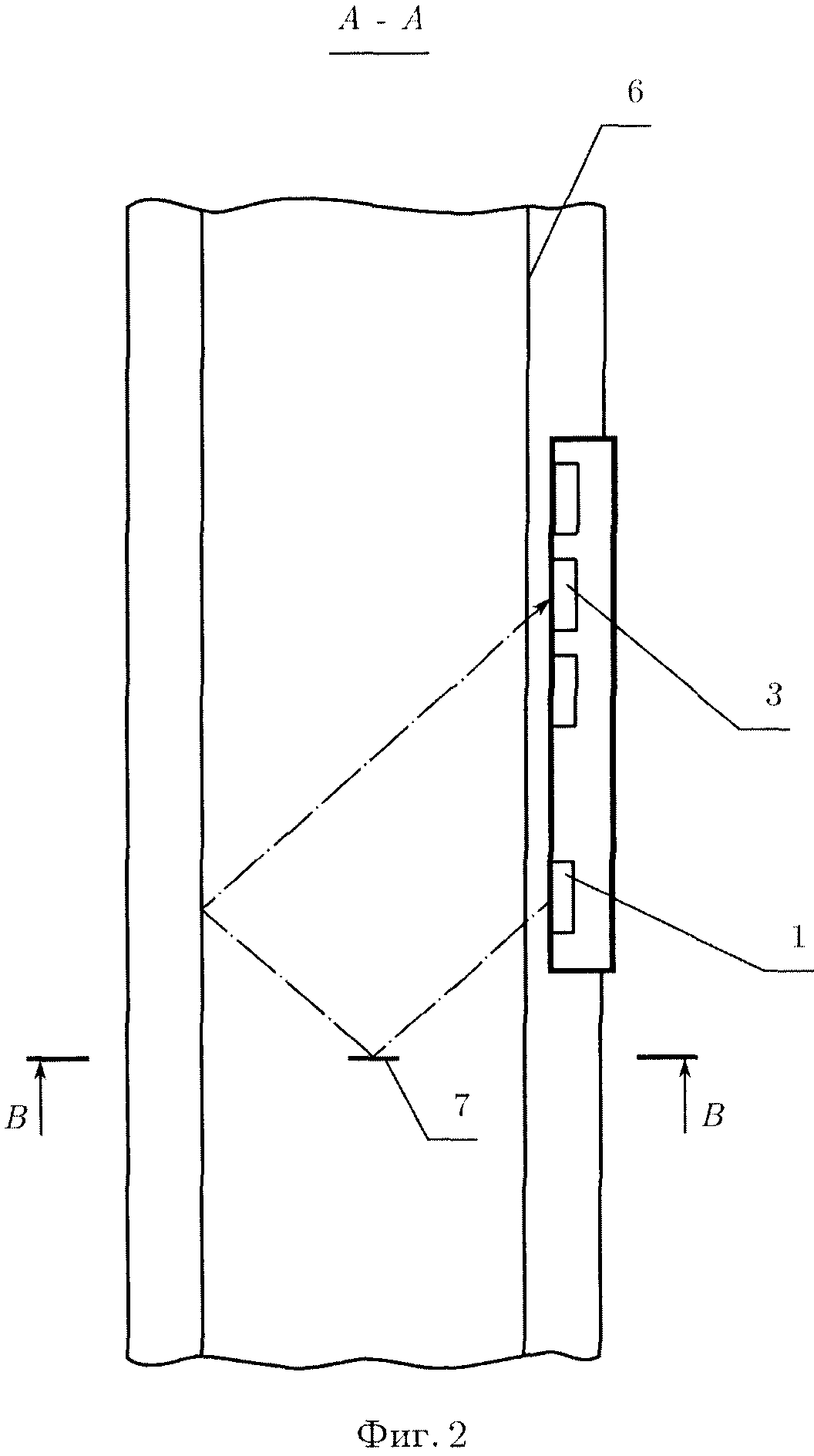
Фиг.7: схема распространения опорного и тестового сигналов.
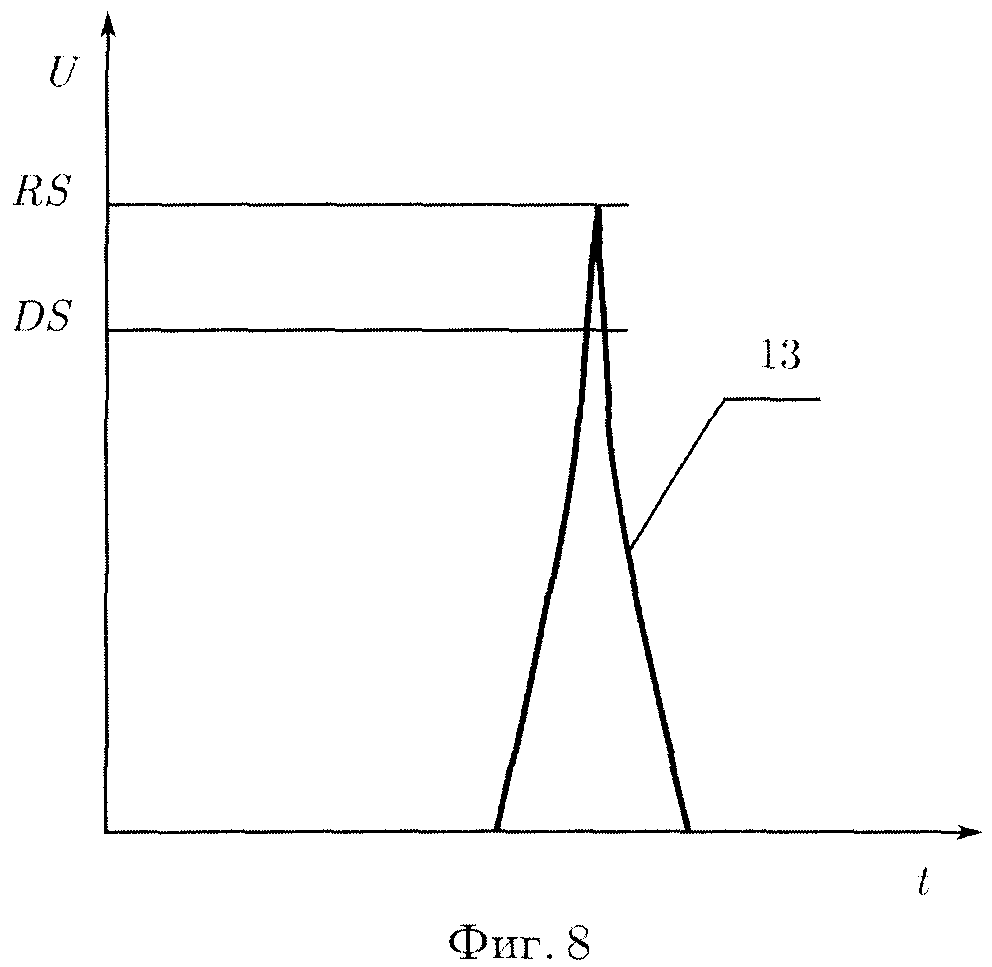
Фиг.8: опорный сигнал и текущий порог регистрации амплитуды дефектов.
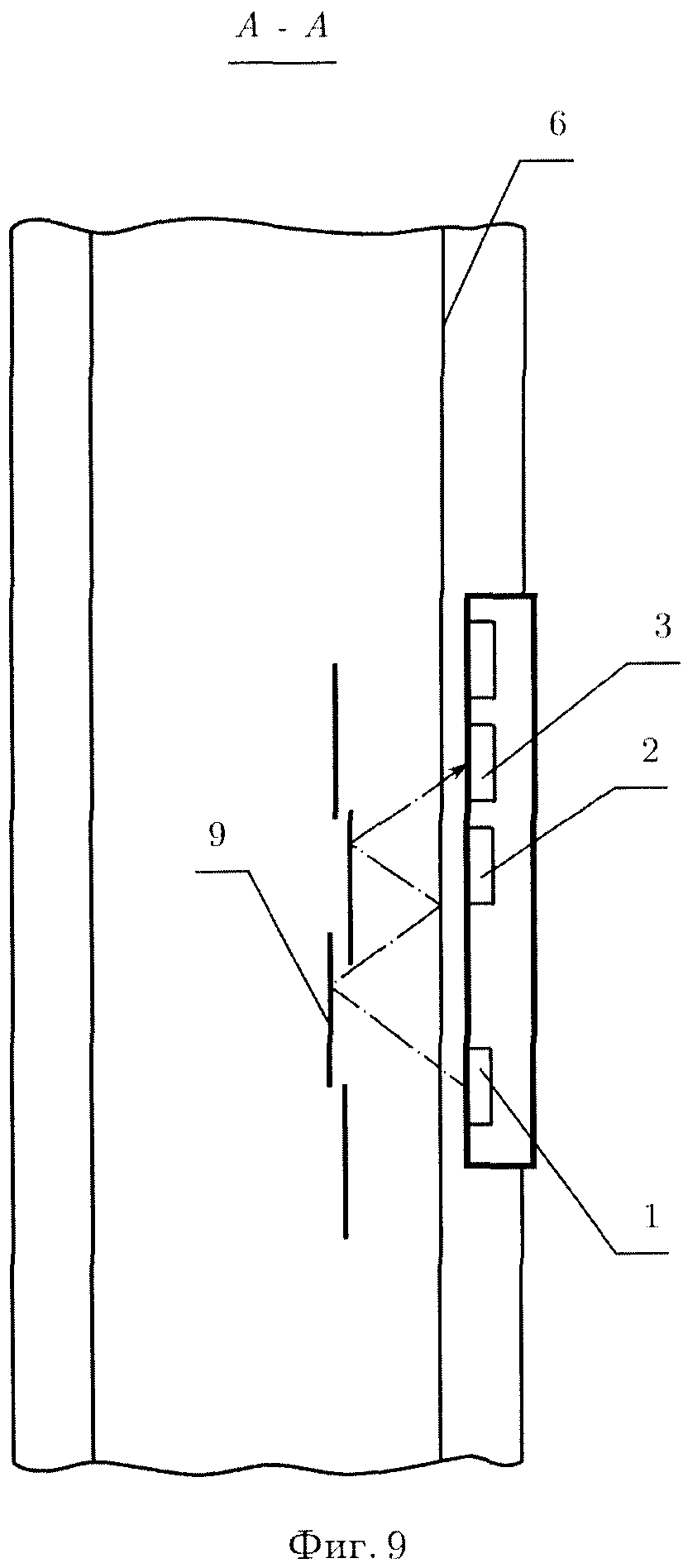
Фиг.9: решение проблемы наличия продольного дефекта.
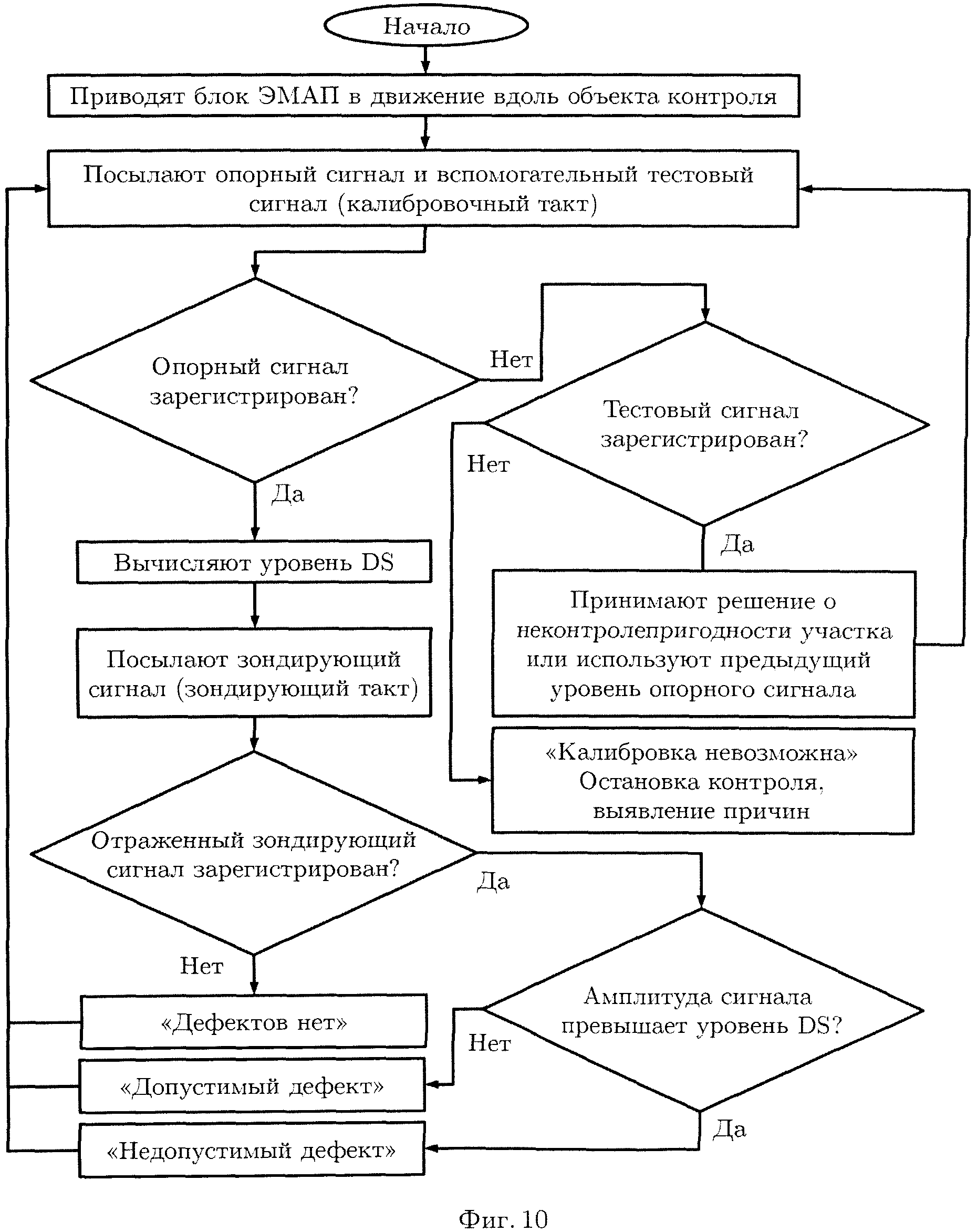
Фиг.10: упрощенный алгоритм работы дефектоскопа (опорный сигнал на рабочей мощности генератора, дополненный вспомогательным тестовым сигналом).
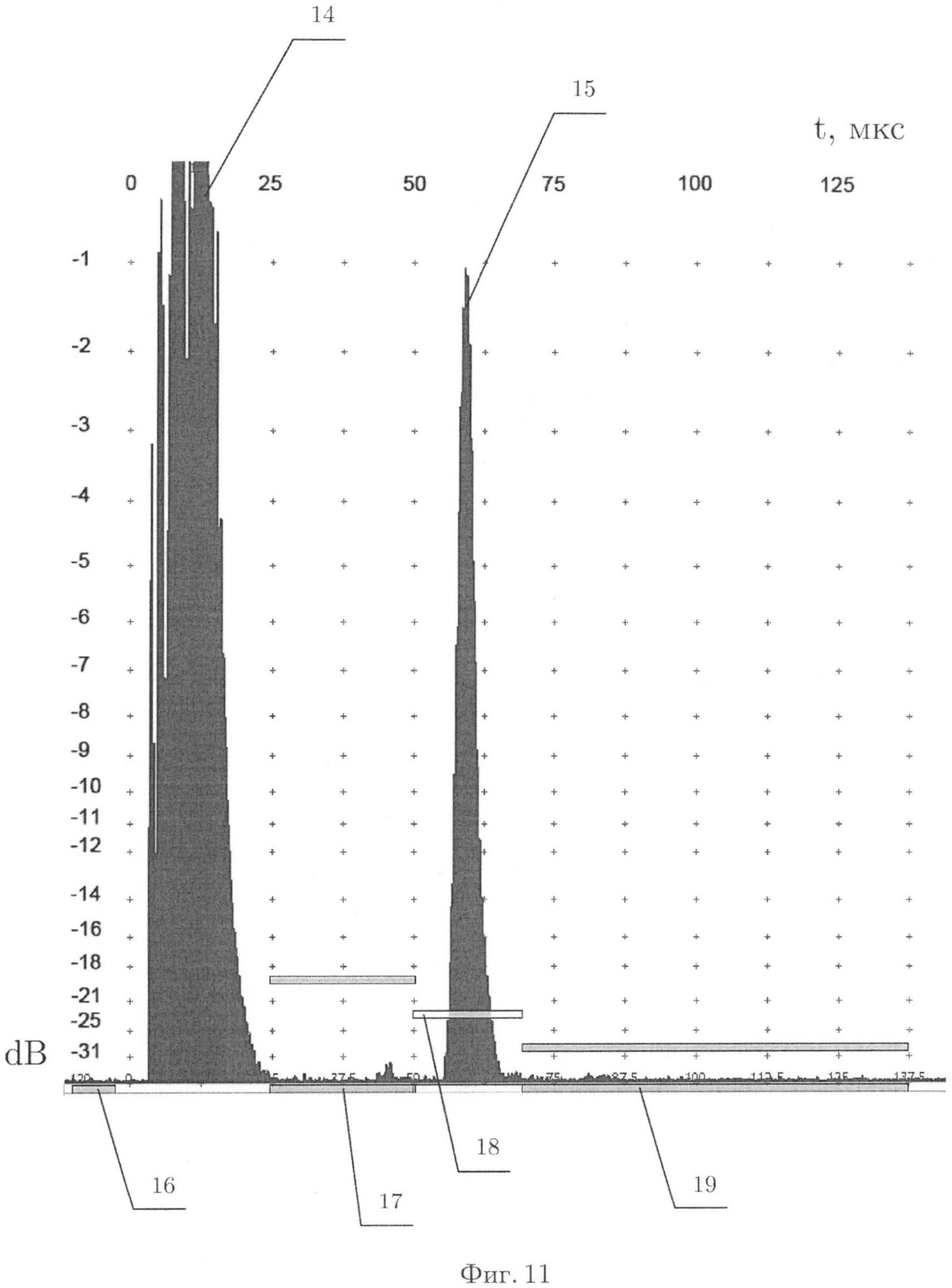
Фиг.11: А-скан при калибровке на эталонном образце.
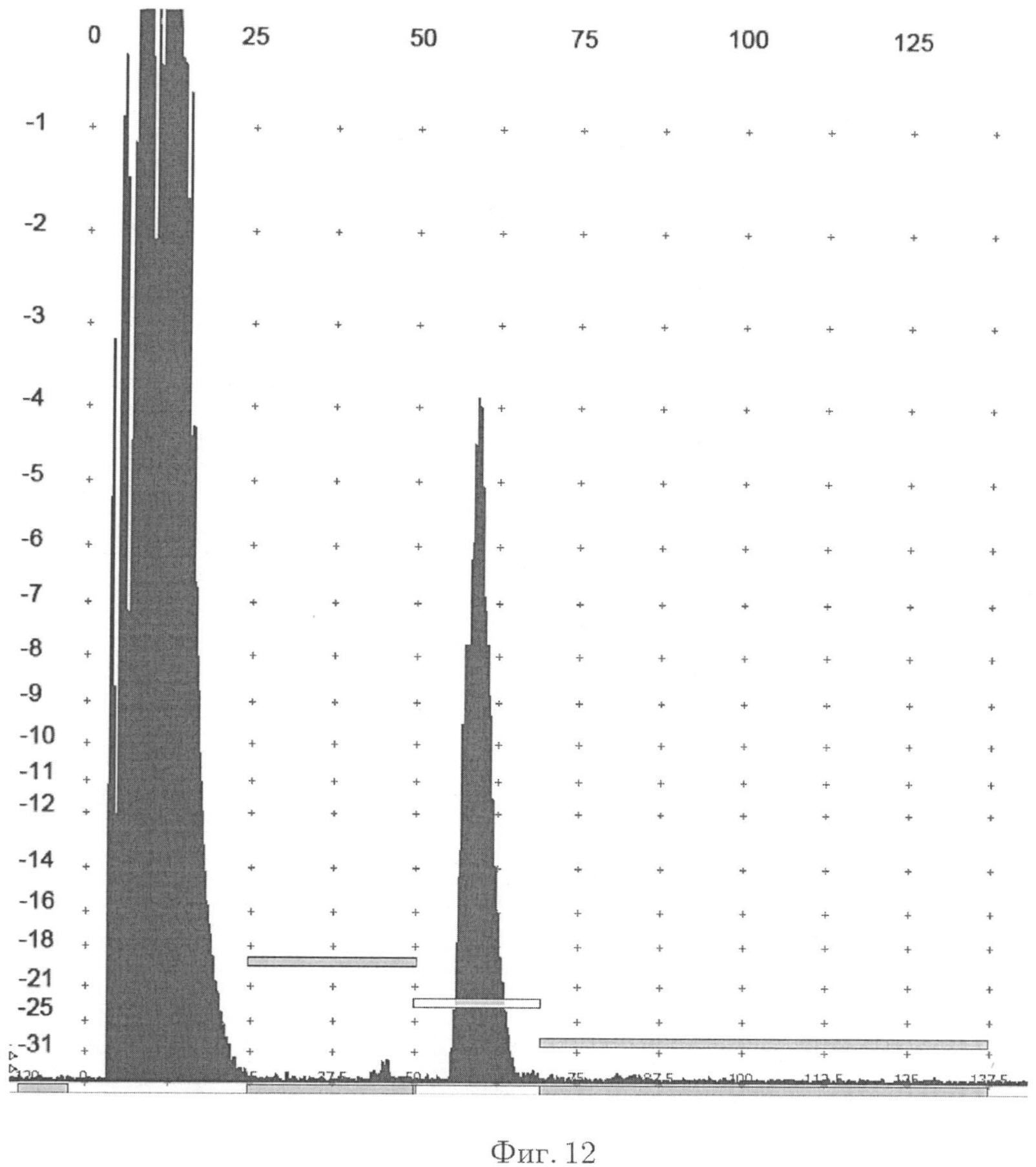
Фиг.12: А-скан с опорным сигналом в ожидаемом приемнике.
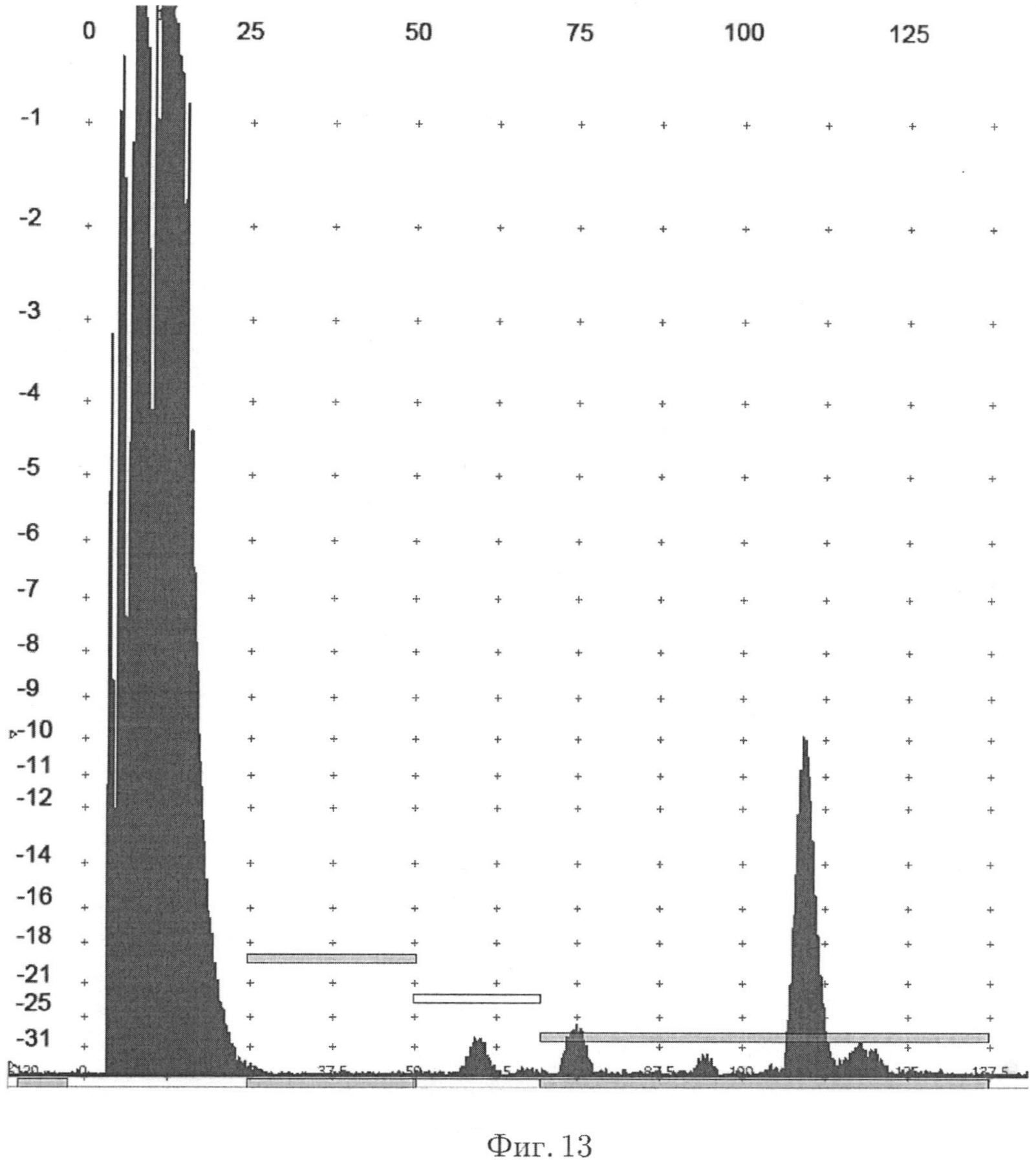
Фиг.13: А-скан с опорным сигналом в дальнем от генератора приемнике.
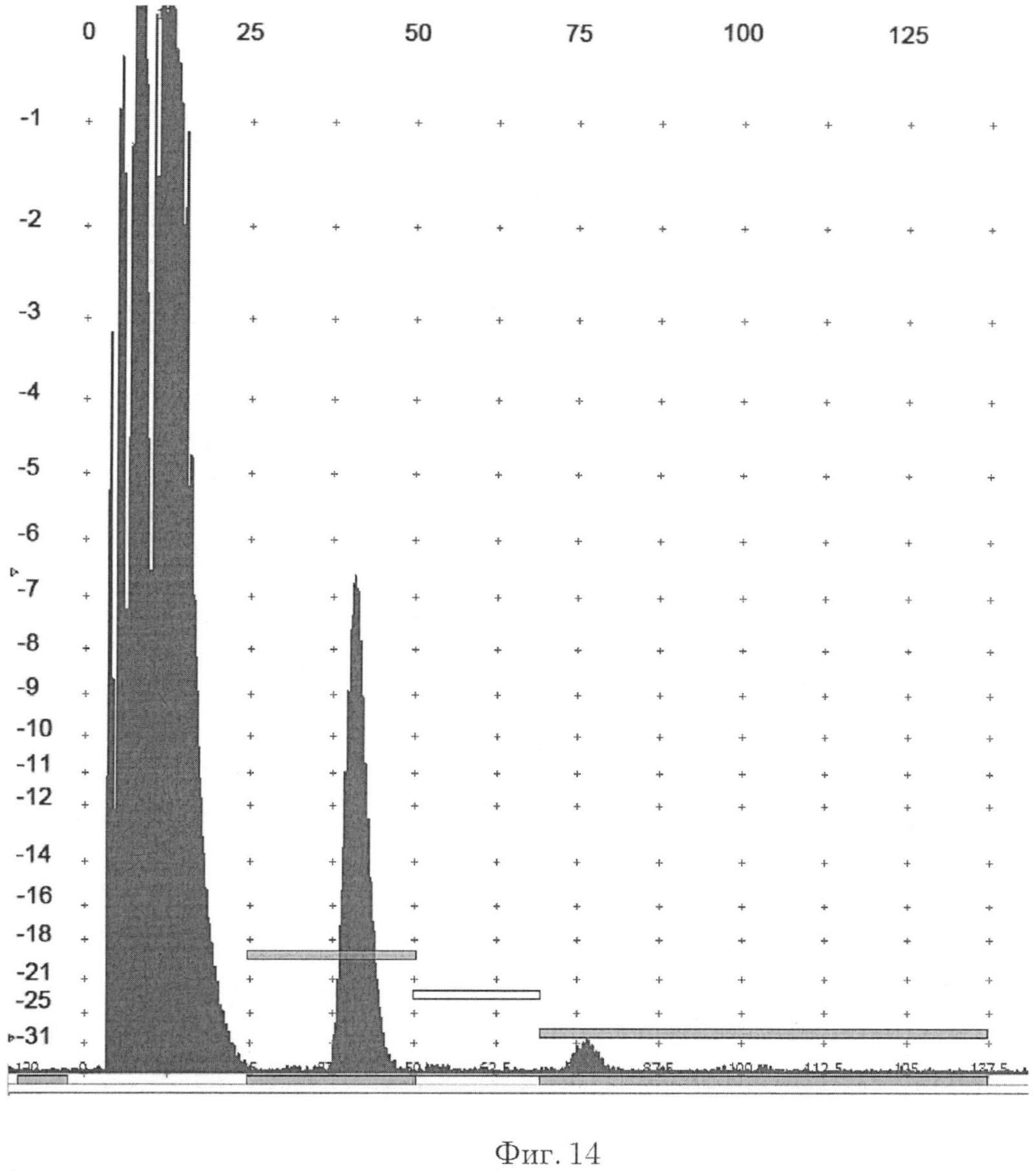
Фиг.14: А-скан с опорным сигналом в ближнем от генератора приемнике.
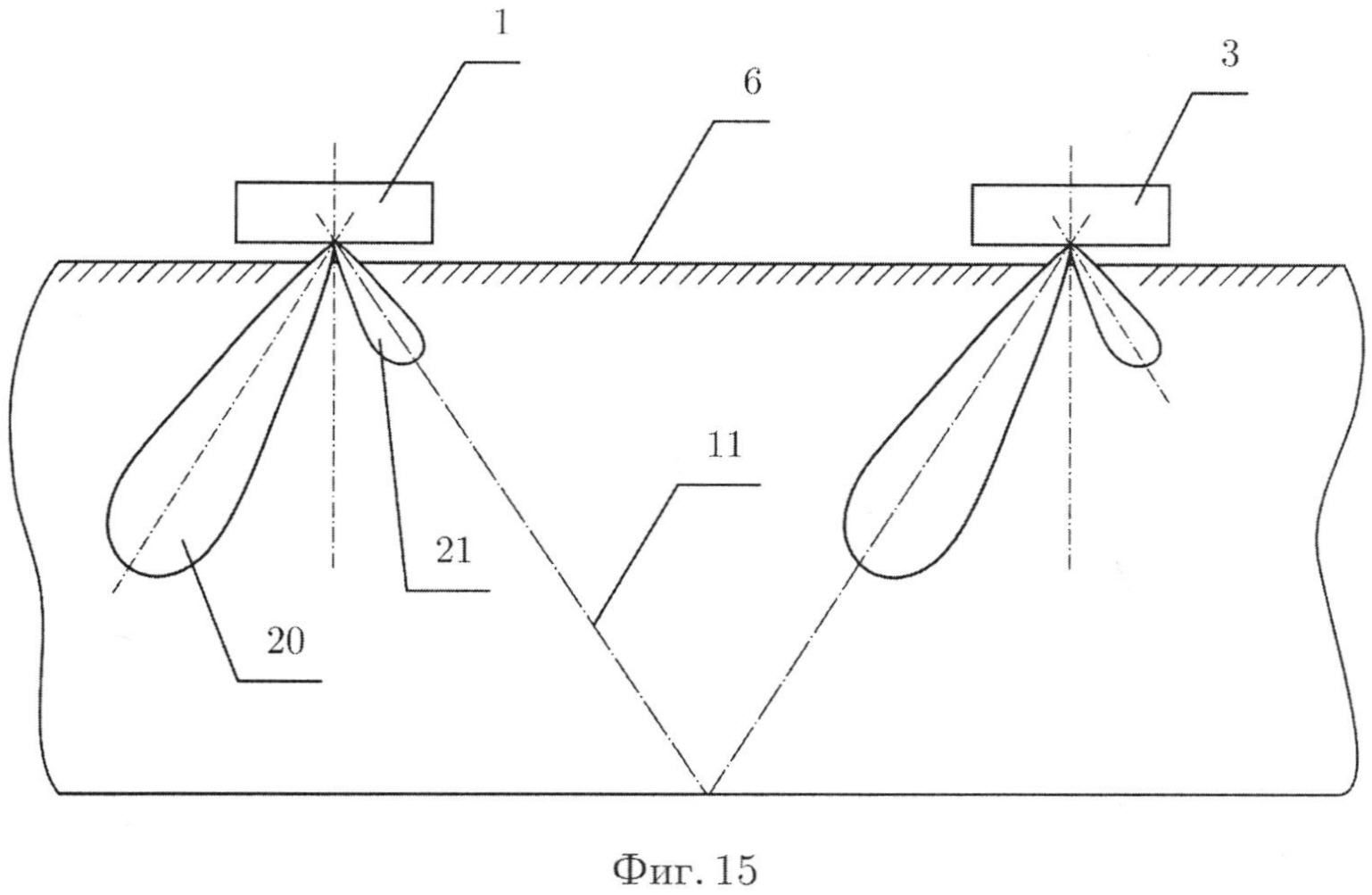
Фиг.15: схематическое изображение акустической связи между генератором и приемником в случае использования в качестве опорного сигнала остаточного УЗ-излучения генератора.
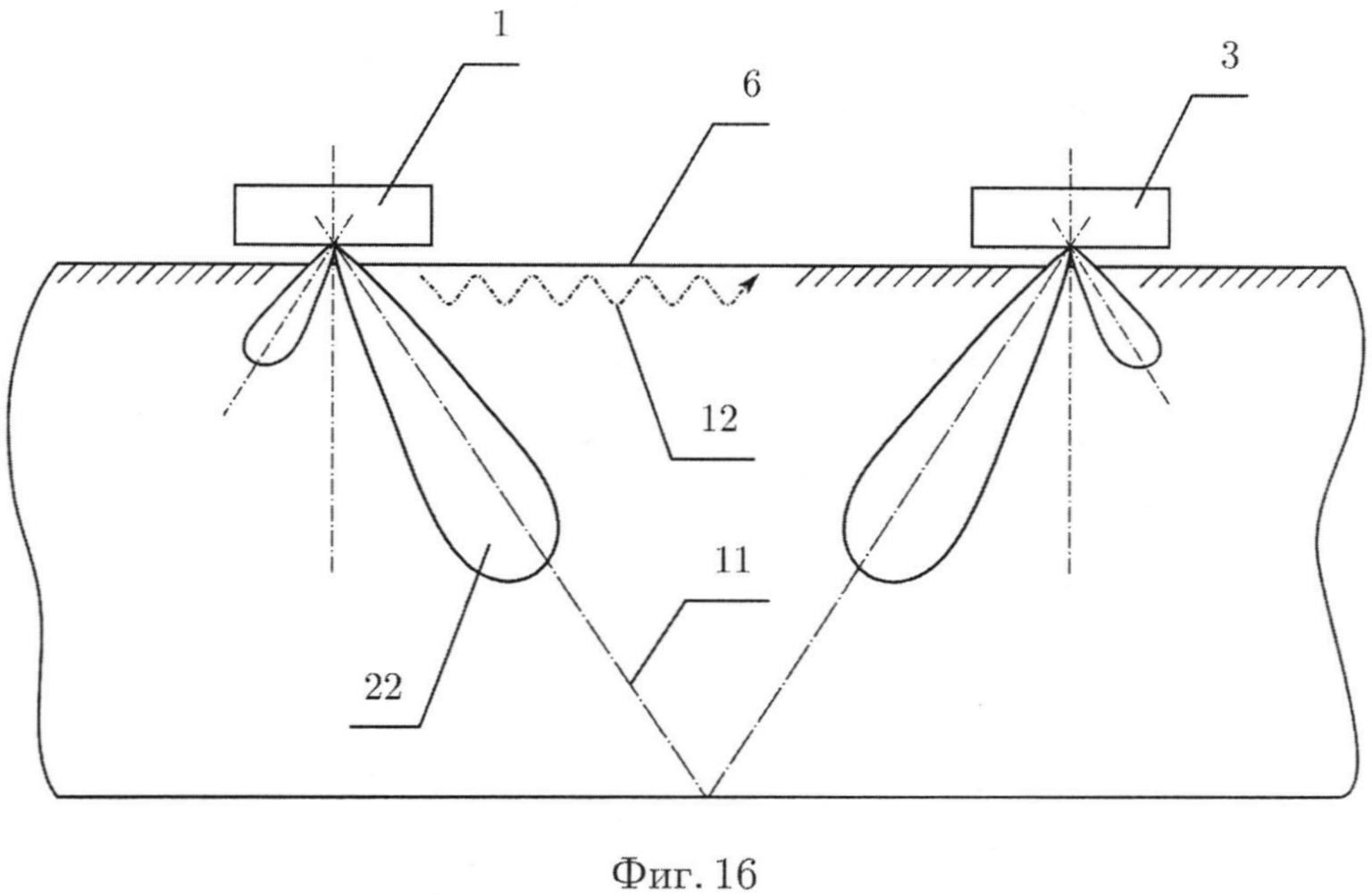
Фиг.16: схематическое изображение акустической связи между генератором и приемником в случае использования в качестве опорного сигнала принудительного УЗ-излучения, а также излучения генератором вспомогательного тестового сигнала.
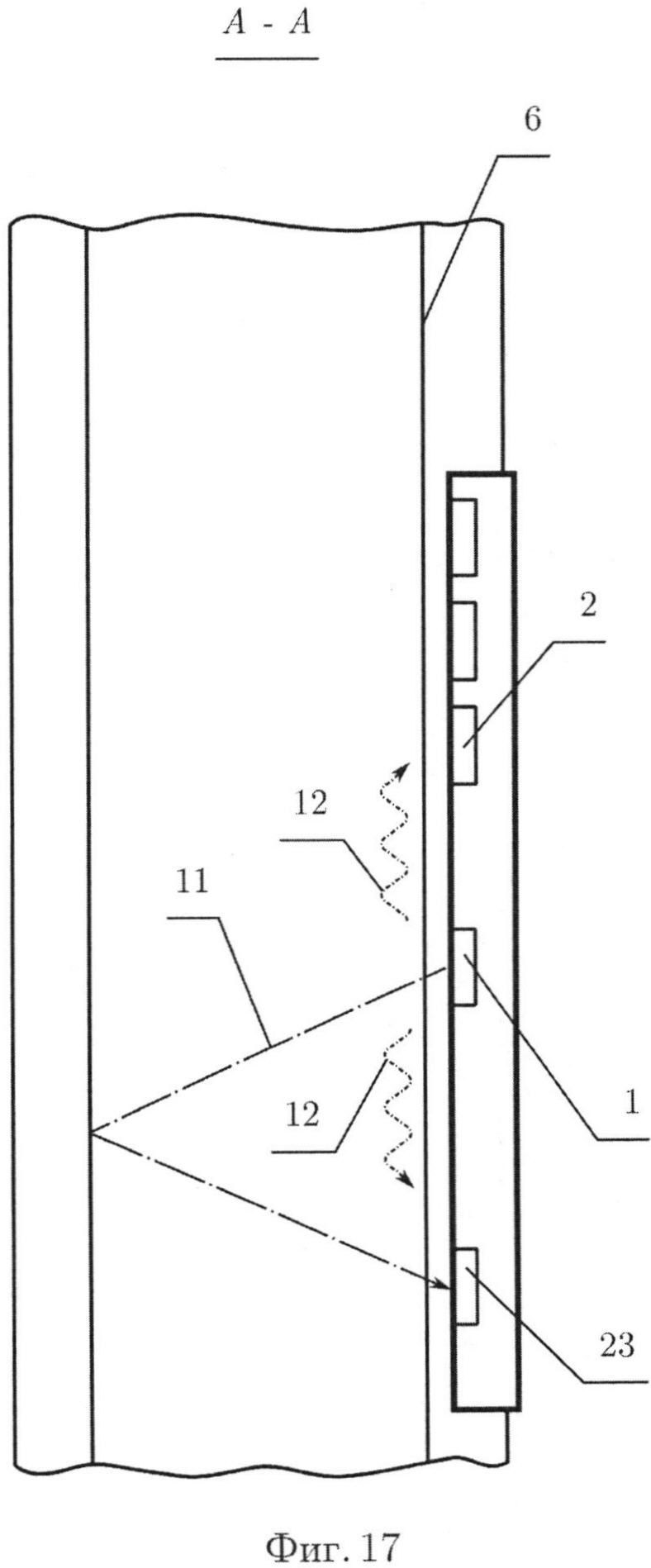
Фиг.17: возможный альтернативный вариант схемы размещения электроакустических преобразователей с отдельным приемником опорного сигнала.
Осуществление изобретения показано на примере УЗ мультитандемного дефектоскопа для контроля головки железнодорожных рельсов.
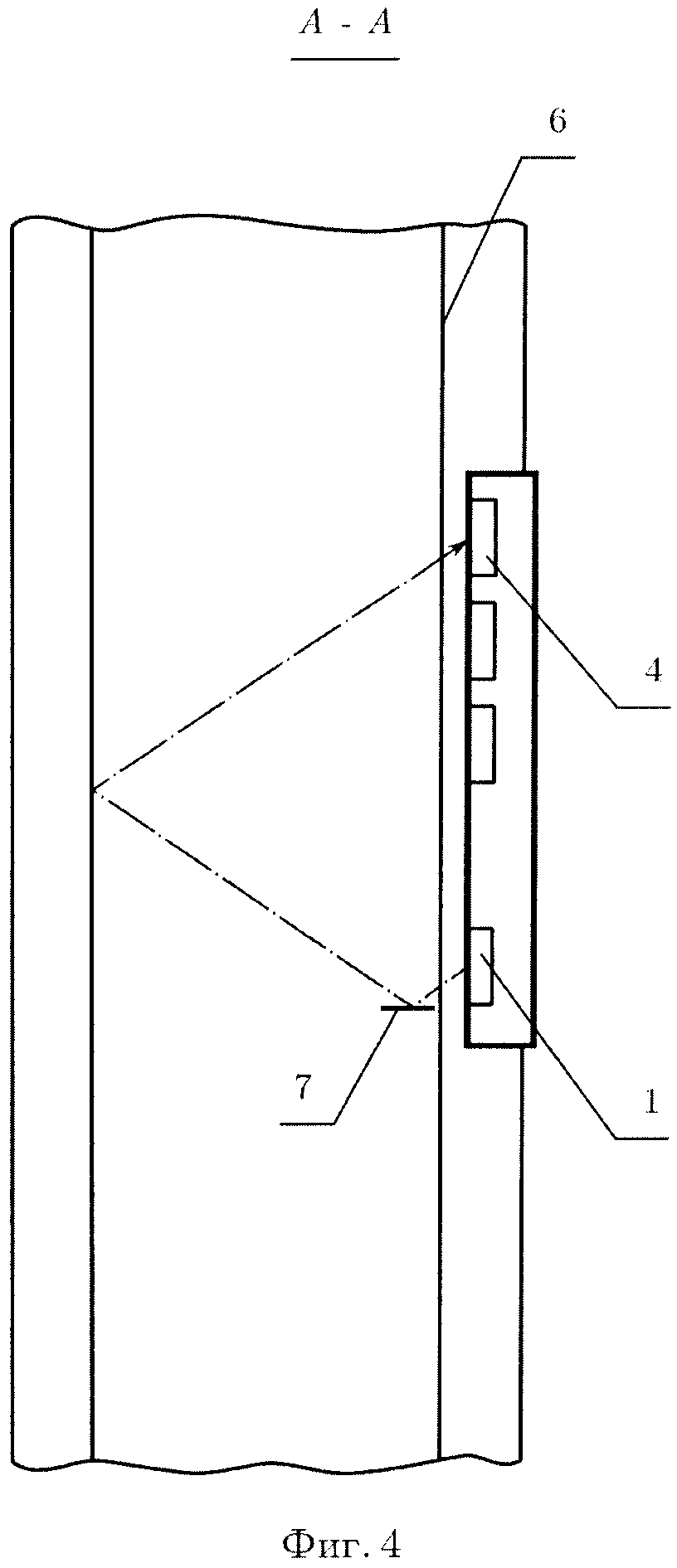
Дефектоскоп содержит совокупность расположенных в ряд электромагнитно-акустических преобразователей (ЭМАП) 1-4. образующих рядный блок 5 (фиг.1) функционально объединенных ЭМАП. Головной преобразователь 1 является генератором или генератором приемником УЗ-излучения, а последующие преобразователи 2-4 выполняют функцию приемников УЗ-волн. ЭМАП 1-4 расположены со стороны боковой грани 6 головки рельса таким образом, чтобы УЗ-волна, сгенерированная излучающим ЭМАП 1, после отражения от дефекта 7, а затем от противоположной грани рельса, была принята одним из ЭМАП 2-4 (фиг.2-4). Данная схема прозвучивания головки рельса является развитием тандемной схемы зеркального эхо-метода (Алешин П.П., Белый В.Е., Вопилкин А.Х. и др. Методы акустического контроля металлов. - М.: Машиностроение, 1989. - С.95, 155) и условно названа разработчиками мультитандемной. Блок 5 связан с устройством управления и обработки данных.
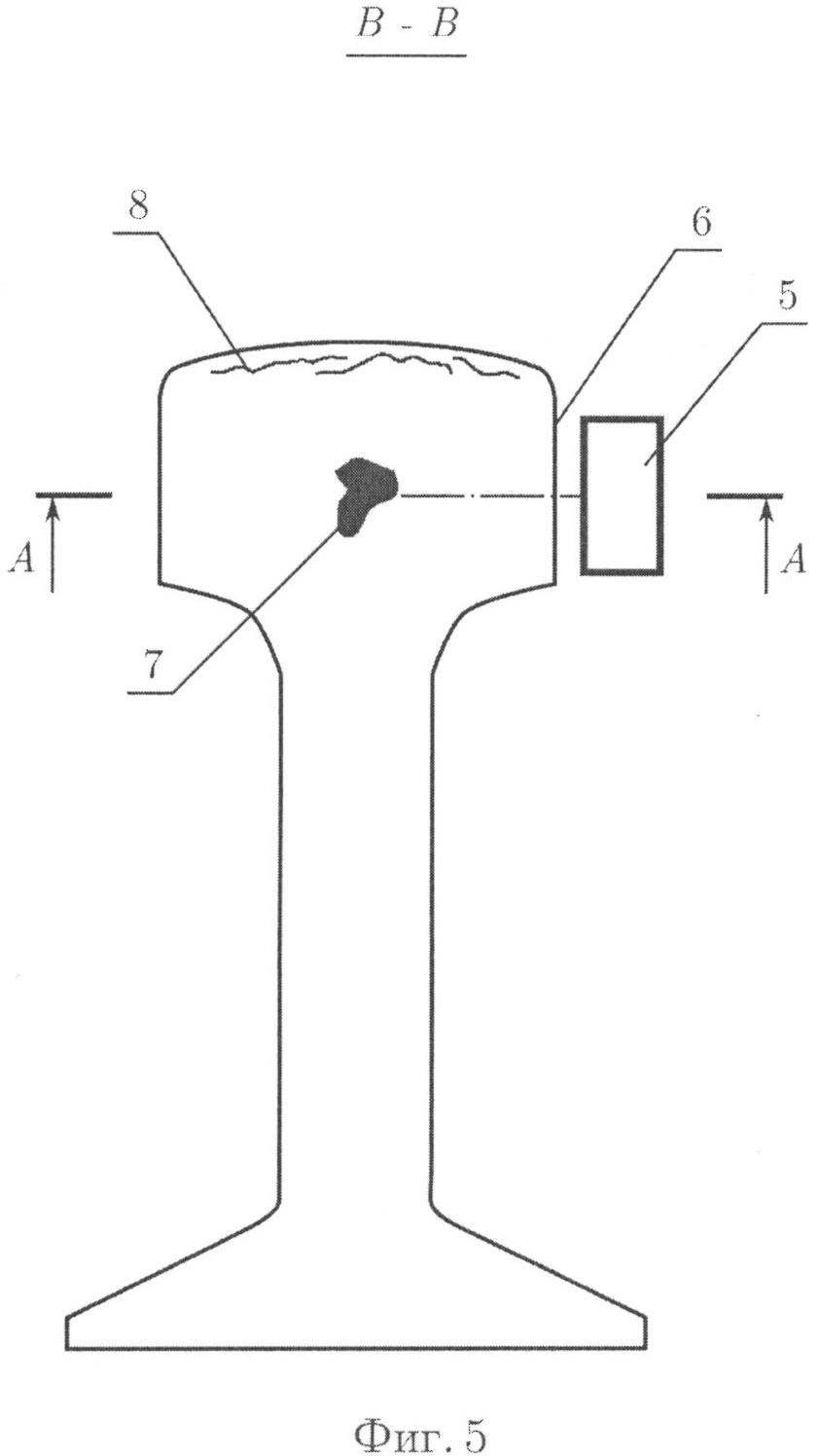
При помощи дефектоскопа представленной конструкции возможно проведение качественного эксплуатационного контроля головки рельса по всей длине нити рельсов благодаря тому, что при мультитандемной схеме дефекты 8 под поверхностью катания не мешают ходу зондирующего УЗ-луча (фиг.5), а движению блока 5 вдоль боковой рабочей грани 6 головки рельса не препятствуют конструктивные элементы железнодорожного пути. Однако при этом остается опасность перебраковки или пропуска опасного дефекта в процессе УЗ-контроля из-за следующих причин:
1. Форма рабочей грани в сечении отличается от номинальной из-за износа, что ведет к ослаблению измерительного сигнала вследствие рассеяния части энергии УЗ-волн в разные стороны или изменения траектории распространения УЗ-волн относительно приемников.
2. Наличие коррозии на отражающей поверхности головки рельса, что также вызывает частичное рассеивание УЗ-волн и, как следствие, ослабление регистрируемого сигнала.
3. Наличие загрязнения на отражающей поверхности головки рельса, что вызывает поглощение УЗ-волн и, как следствие, ослабление полезного сигнала.
4. Различное затухание УЗ-волн в рельсах разных производителей, что означает различие амплитуд принимаемых сигналов от одних и тех же дефектов, но в разных рельсах, которые могут быть уложены в один путь.
5. Наличие в головке рельса «полупрозрачных» продольных дефектов, частично рассеивающих и/или поглощающих УЗ-волны, что ведет к уменьшению амплитуды принимаемого сигнала.
6. Наличие в головке рельса продольных дефектов в виде грубых растрескиваний 9, не пропускающих УЗ-волны и полностью блокирующих зондирующий сигнал 10 генератора 1 (фиг.6). Возможна ситуация, когда даже в случае отражения от поперечного дефекта зондирующий сигнал будет экранирован обширным продольным дефектом и не будет принят ни одним из приемников, что может быть ошибочно принято за отсутствие на данном участке дефектов.
Перечисленные проблемы решаются при помощи автоматической самокалибровки УЗ-дефектоскопа в движении, аналоги которой не известны.
Для самокалибровки дефектоскопа используют опорный сигнал в виде УЗ-волны, регистрация которого должна обеспечиваться и при отсутствии поперечного дефекта, что достигается в случае мультитандемной схемы отражением УЗ-волны от противоположной стенки рельса, для чего генератор 1 излучает наклонную УЗ-волну 11 (фиг.7), зеркально к зондирующей волне 10 относительно нормали. Причем амплитуда как эхо-сигнала (зондирующего сигнала, отраженного от поперечного дефекта или дефекта с ориентацией, близкой к поперечной), так и опорного сигнала, с высокой степенью вероятности подвержены одинаковым искажающим результат измерения факторам, что позволяет задавать пороговый уровень срабатывания дефектоскопа (фиг.8) в каждый момент времени, то есть динамически, по выражению (1), исходя из текущего значения амплитуды опорного сигнала RS. Таким образом обеспечивается одинаковая чувствительность контроля вне зависимости от указанных мешающих факторов №№1-5, что ведет к повышению точности задания порогового уровня срабатывания УЗ- дефектоскопа в процессе контроля. Действие мешающего фактора 6 также устраняется (фиг.9) в процессе контроля.
Возможна частная ситуация, когда опорный сигнал, отраженный от противоположной поверхности рельса, принят соответствующим приемником и зарегистрирован в ожидаемом временном интервале. Однако при появлении продольного дефекта возможно многократное отражение опорного сигнала и прием тем же приемником, в том же, ожидаемом для опорного сигнала, временном интервале, но с меньшей амплитудой. В этом случае возникает опасность ложного решения, ведущего к неоправданно заниженному браковочному уровню, пропуску продольного дефекта, а следовательно, и замаскированного им опасного поперечного дефекта. Следовательно, необходим анализ сигнала сразу в нескольких приемниках. Обычный опорный сигнал от противоположной стенки обычно дает сигнал только в одном определенном приемнике и в определенном стробе, а возможные всплески в соседних приемниках будут в том же временном интервале, что и в основном. Однако в случае продольного дефекта, помимо сигнала в ожидаемом приемнике, появятся всплески и в соседних приемниках, причем в других временных интервалах и чем дальше от генератора, тем дальше на временной оси (фиг.13 и 14).
Совместно с основным опорным сигналом 11 целесообразно использовать вспомогательный тестовый УЗ-сигнал 12, траектория распространения которого в объекте контроля должна существенно отличаться от траектории опорного сигнала 11 (фиг.7). Тестовый сигнал 12 служит для проверки работоспособности системы.
При осуществлении изобретения производят следующие действия (фиг.10).
Перед началом работы дефектоскоп размещают, например, на тележке и подводят блок ЭМАП 5 к рабочей грани 6 головки рельса. Перемещая тележку приводят блок ЭМАП 5 в движение вдоль объекта контроля. Затем при помощи устройства управления и генератора 1 посылают опорный сигнал 11 в сторону приемников, под углом. Одновременно с этим формируют тестовый сигнал путем излучения генератором 1 поверхностной (рэлеевской) УЗ-волны 12 в направлении приемника 2. Если хотя бы один из приемников 2-4 зарегистрировал опорный сигнал 11 после его отражения от противоположной стенки рельса (фиг.7), то вычисляют при помощи устройства для обработки данных уровень порога регистрации амплитуды дефектов DS по выражению (1), также посылая генератором 1 зондирующий сигнал в рабочем направлении (фиг.2-4). Если хотя бы один из приемников 2-4 зарегистрировал эхо-сигнал, отраженный от поперечного дефекта 7 в головке рельса, то сравнивают при помощи устройства для обработки данных амплитуду данного сигнала с ранее вычисленным текущим уровнем порога регистрации амплитуды дефектов DS. В случае если амплитуда эхо-сигнала больше порога регистрации амплитуды дефектов DS, то делают вывод о присутствии в головке рельса поперечного недопустимого дефекта 7. После этого повторяют указанные действия, так как блок ЭМАП 5 успевает переместиться к следующему участку рельса.
Если опорный сигнал 11 не был зарегистрирован, то проводят анализ тестового сигнала 12. Если тестовый сигнал 12 был зарегистрирован в текущем такте, то по решению оператора пороговый уровень остается предыдущим или участку присваивается статус «неконтролепригоден». Если тестовый сигнал 12 также не зарегистрирован, то делают вывод о невозможности контроля из-за проблем различного уровня значимости (выход из строя ЭМАП или электронного оборудования дефектоскопа, отрыв преобразователя от объекта контроля в силу различных причин и пр.). Если регистрация сигналов 11 и 12 отсутствует в ряде последовательных тактов работы, то контроль прекращают для устранения неисправности дефектоскопа.
Таким образом, пороговый уровень срабатывания УЗ-дефектоскопа в процессе контроля оказывается точно заданным.
Вид регистрируемых сигналов показан на А-сканах приемного преобразователя (фиг.11-14).
Сигнал 14 представляет собой остаточную наводку зондирующего сигнала, проникающую на входные цепи приемных преобразователей 2-4, в частности, через эфир и цепи электропитания. Данный сигнал не анализируют. Сигнал 15 является полезным сигналом. Расположение данного сигнала на горизонтальной оси определяется временем, прошедшим с момента генерации УЗ-волны до момента ее приема. Уровень амплитуды характеризует энергию полученной УЗ-волны. Для анализа сигнала на определенном интервале времени служат временные участки ожидания соответствующего сигнала (стробы) 16-19. Для каждого приемника стробы могут быть расположены на различном расстоянии и иметь разную протяженность.
При калибровке на эталонном образце с гарантированным отсутствием дефектов, износа и коррозии поверхностей сигнал 15 (строб 18) имеет максимально возможную величину (фиг.11: окно А-скана приемника 3 на фиг.7). При контроле реального рельса с величиной поглощения и рассеивания УЗ, отличающейся от эталонного образца, уровень аналогичного опорного сигнала существенно ниже (фиг.12), именно относительно данного уровня выставляют браковочный уровень, что исключает пропуск брака.
При регистрации продольного «блокирующего» дефекта (фиг.9) картина А-сканов для приемников 2 и 3 различна (фиг.13 и 14), что позволяет выявить данный дефект. В случае наличия непрозрачного «блокирующего» продольного дефекта 9 на А-скане будет получен эхо-сигнал от дефекта 9 перед или после предполагаемого опорного сигнала 11, который будет отсутствовать в силу его экранирования дефектом 9 в такте опорного сигнала 11.
В мультандемном дефектоскопе применяют ЭМАП однонаправленного излучения с диаграммой направленности, характеризующейся наличием хорошо выраженного переднего лепестка 20. Однако на практике при этом не удается полностью избавиться от заднего лепестка 21. Данное остаточное УЗ-излучение ЭМАП 1 пригодно для использования в качестве опорного сигнала 11. Причем формирование опорного сигнала 11 осуществляется в каждом такте зондирующего излучения при поиске дефектов, что означает высокую производительность контроля, а следовательно, и возможность достижения высоких скоростей движения дефектоскопа вдоль рельсового пути. Недостатком данного варианта является низкая амплитуда опорного сигнала 11. что в некоторых случаях, например при очень сильном затухании УЗ-волн, способно привести к потере опорного сигнала 11.
Альтернативным вариантом получения опорного сигнала 11 является принудительное излучение УЗ-волны на рабочей мощности генератора в дополнительном такте, характеризующееся хорошо выраженным лепестком 22 диаграммы направленности ЭМАП 1. Высокая амплитуда излучаемых УЗ- волн позволяет получить опорный сигнал 11 даже для рельсов с высоким затуханием или большим износом. В свою очередь, данный вариант имеет в качестве недостатка немного меньшую производительность, а значит, и максимальную скорость контроля (движения) из-за наличия дополнительных тактов излучения для опорного сигнала 11, что снижает плотность контроля на очень высоких скоростях.
Преимуществами обоих указанных вариантов обладает схема (фиг.17) с отдельным приемником 23 для опорного сигнала 11, однако из-за громоздкости конструкции область практического применения данного решения ограничена.

Способ ультразвукового контроля металлургической продукции электромагнитно-акустическими преобразователями на воздушной подушке и устройство для его осуществления
Блок катушек для электромагнитно-акустических преобразователей
Способ определения массы ферромагнитного материала и устройство для его осуществления
Способ размагничивания изделий из ферромагнитных материалов и устройство для его осуществления
Зеркально-теневой способ ультразвукового контроля с разностной компенсацией мешающих факторов
Способ ультразвукового контроля поверхностных и подповерхностных дефектов металлопродукции и устройство для его осуществления
Способ промышленной ультразвуковой диагностики вертикально ориентированных дефектов призматической металлопродукции и устройство для его осуществления
Устройство для получения ионпроводящих мембран методом полива
Способ получения твердого электролита rbagi
Беспилотный летательный аппарат с системой охлаждения батареи топливных элементов
Гибкий тонкопленочный положительный электрод и способ его изготовления
Гибкий тонкопленочный положительный электрод и способ его изготовления
Устройство для неразрушающего контроля металлопроката
Система бесконтактного определения координат мобильного робота и способ для ее реализации
Система бесконтактного определения координат мобильного робота и способ для ее реализации

