Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ МОТОР-ГЕНЕРАТОРОМ
Вид РИД
Изобретение
Изобретение относится к электротехнике, а именно к системам управления мотор-генераторными устройствами транспортных средств с двигателями внутреннего сгорания.
Известно устройство, (Вершигора В.А., Игнатов А.П. и др. «Автомобиль ВАЗ-2108. - М,: ДОСААФ, 1986, стр.194), в котором для поддержания в заряженном состоянии бортовой аккумуляторной батареи автомобиля используется синхронная машина с электромагнитным возбуждением.
Недостатком этого устройства является отсутствие возможности запуска двигателя внутреннего сгорания (ДВС) с помощью этой синхронной машины.
Известно также устройство, описанное в EP 0406182 B1, МПК5 F02N 11/04, публ. 02.01.1991 г., в котором синхронная машина с постоянными магнитами используется и для запуска ДВС, и для заряда бортовой аккумуляторной батареи, т.е. она выполняет функции стартера и генератора.
Недостатком этого устройства является отсутствие электромагнитного возбуждения и блока оптимизации режимов работы синхронной машины в условиях ограничения по току и напряжению питания для оптимального использования габаритной мощности синхронной машины и установленной мощности силового преобразователя.
Наиболее близким техническим решением является способ и устройство известные из патента RU 2249123, МПК4 F02N 11/04, публ. 27.03.2005 г., в котором работа синхронной машины с электромагнитным возбуждением основана на функционировании векторного токового следящего контура во вращающейся ортогональной системе координат (d, q), ось d которой направлена по продольной оси машины. При этом за счет установки неодинаковых значений величин гистерезисов релейных элементов по продольной и поперечной осям обеспечивается работа машины с уменьшенными дополнительными потерями как в тяговом, так и в генераторном режимах.
Недостатком этого устройства является отсутствие минимизации дополнительных (коммутационных) потерь в силовом преобразователе за счет оптимизации алгоритма совместного управления фазными ключевыми элементами.
Решение технической задачи направлено на минимизацию дополнительных (коммутационных) потерь в силовом преобразователе.
Для решения поставленной технической задачи управления мотор-генератором на основе синхронной машины измеряют текущие значения напряжения бортовой аккумуляторной батареи, фазных токов и напряжений, а также скорости и углового положения ротора и с учетом выходных сигналов датчиков положения педалей тормоза и акселератора автомобиля формируют заданные значения составляющих вектора тока статора по продольной и поперечной осям в неподвижной относительно ротора ортогональной системе координат (d, q), ось d которой направлена по продольной оси ротора синхронной машины, а также заданное значение тока возбуждения, которое затем формируют в обмотке возбуждения с помощью регулятора тока возбуждения, в функции поддержания коэффициента мощности, равным или близким к единице, затем измеренные фазные токи переводят в неподвижную относительно ротора ортогональную систему координат (d, q), ось d которой направлена по продольной оси ротора, сравнивают их с заданными, определяют знаки отклонений текущих значений токов от заданных и по этим знакам определяют требуемые мгновенные знаки фазных напряжений, при этом, если в данный момент времени ось d находится в секторе -30÷+30 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, если в данный момент времени ось d находится в секторе +30÷+90 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "С" устанавливают положительным, если в данный момент времени ось d находится в секторе +90÷+150 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают положительным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, если в данный момент времени ось d находится в секторе +150÷+210 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "С" устанавливают положительным, если в данный момент времени ось d находится в секторе +210÷+270 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают отрицательным, если в данный момент времени ось d находится в секторе +270÷+330 электрических градусов относительно оси фазы "А", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают отрицательным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, кроме того, если в данный момент времени ось d находится в любом из шести секторов от -30÷+330 электрических градусов относительно оси фазы "A" в случае отрицательных значений отклонений текущих значений токов от заданных и в случае положительного знака отклонения текущего значения тока от заданного по продольной оси и отрицательного знака отклонения тока по поперечной оси знаки всех фазных напряжений устанавливают одинаковыми.
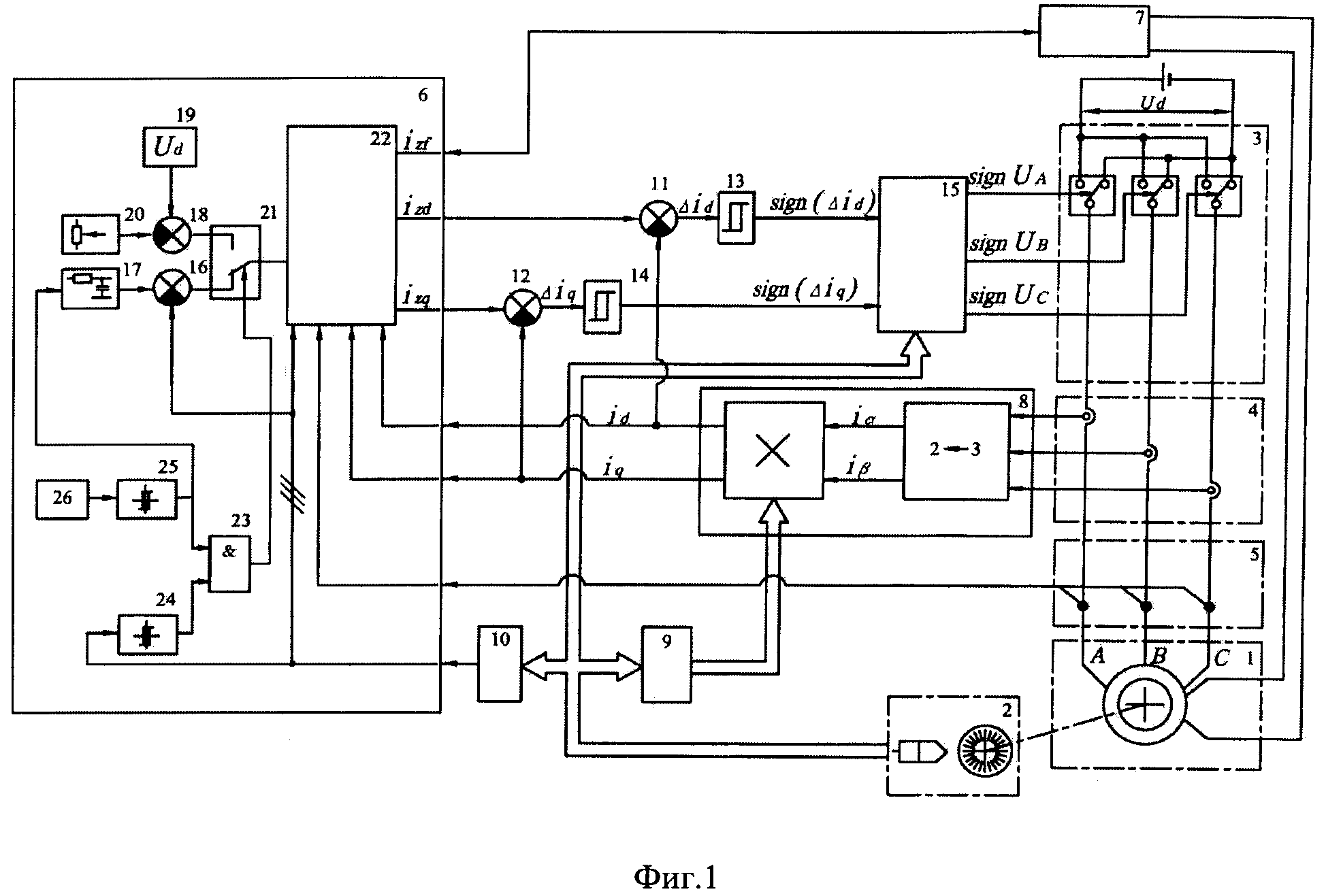
На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способ управления;
на фиг.2 - структурная схема вычислительного блока;
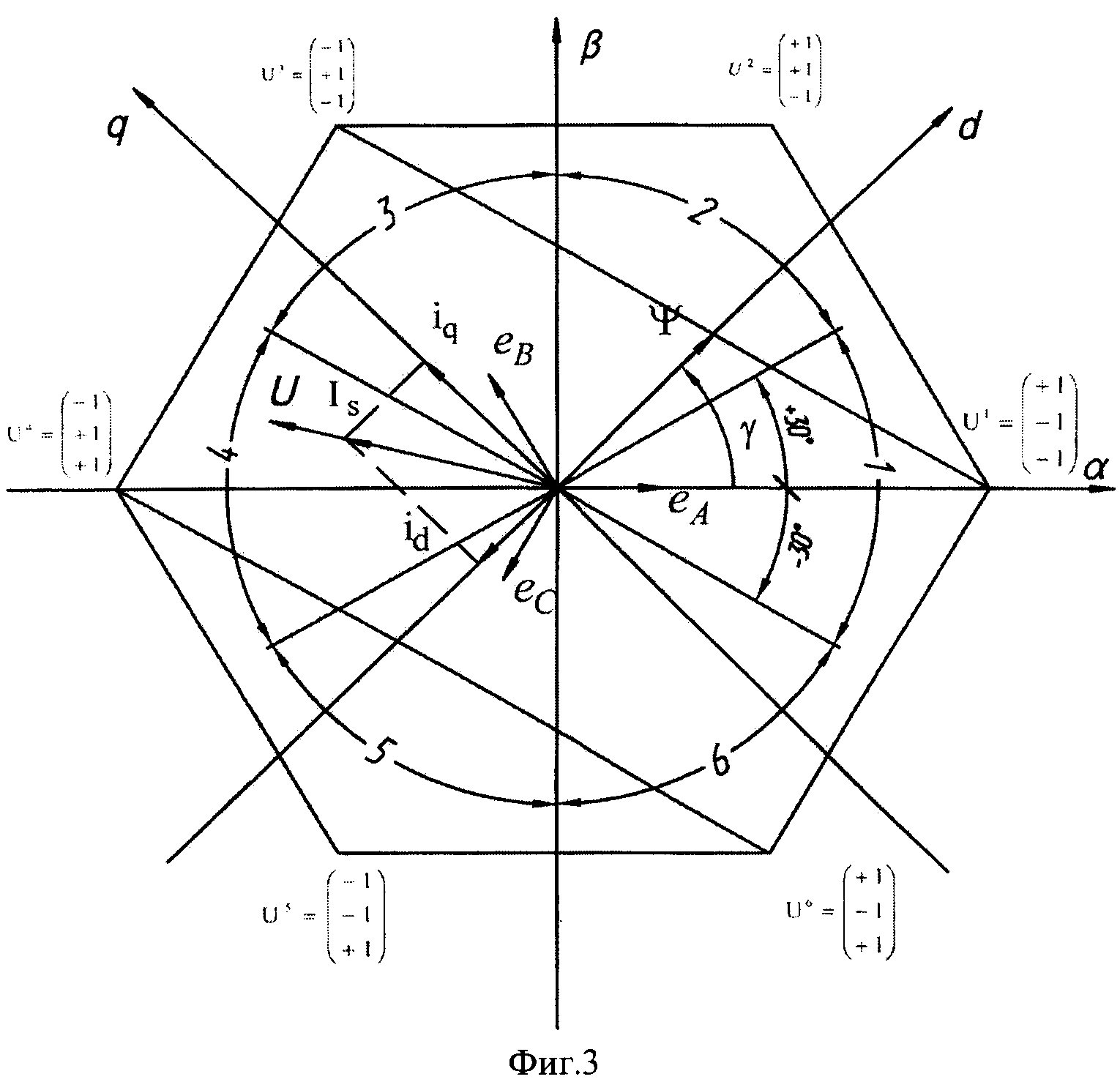
на фиг.3 - векторная диаграмма, поясняющая принцип работы устройства, реализующего предлагаемый способ управления;
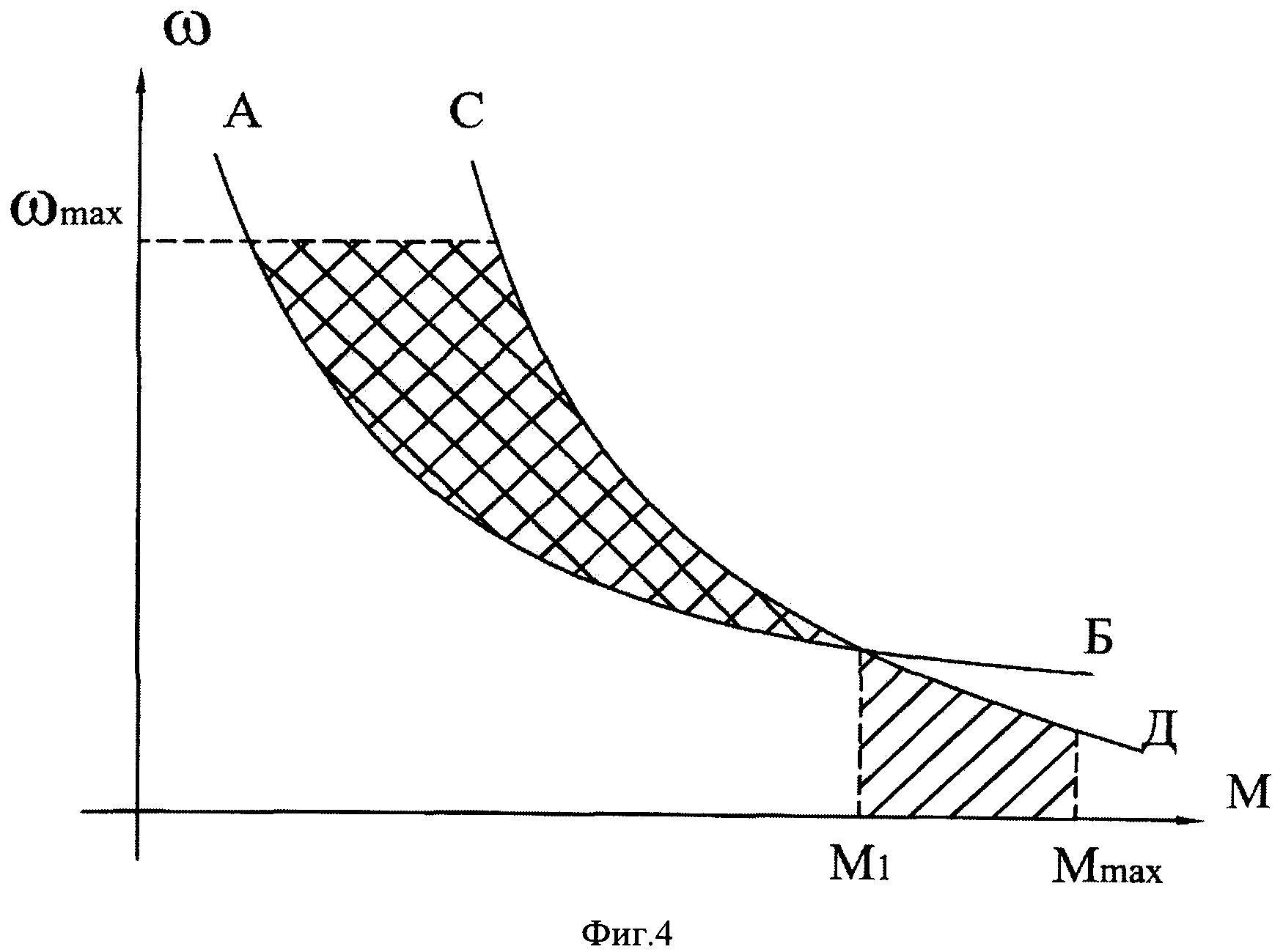
на фиг.4 - механические характеристики мотор-генератора.
Структурная схема устройства, реализующего предлагаемый способ управления мотор-генератором на базе синхронной машины 1 с электромагнитным возбуждением, содержит датчик 2 положения, механически связанный с ротором синхронной машины 1, силовой преобразователь 3, подключенный через датчики тока 4 и датчики напряжения 5 к фазным обмоткам синхронной машины 1, при этом выходы датчиков напряжения 5 подключены к первым входам блока 6 формирования заданных значений тока возбуждения и составляющих вектора тока статора по продольной и поперечной осям, который, в свою очередь, своим первым выходом через регулятор 7 тока возбуждения подключен к обмотке возбуждения синхронной машины 1, в свою очередь, выходы датчиков тока 4 через блок 8 преобразования координат подключены ко вторым входам блока 6 формирования заданных значений тока возбуждения и составляющих вектора тока статора по продольной и поперечной осям, при этом цифровой вход блока 8 преобразования координат через формирователь 9 гармонических функций подключен к выходу датчика положения 2 и ко входу датчика 10 скорости, выход которого подключен к третьему входу блока 6 формирования заданных значений тока возбуждения и составляющих вектора тока статора по продольной и поперечной осям, при этом второй и третий выходы этого блока подключены соответственно к неинвертирующим входам первого 11 и второго 12 блоков сравнения, инвертирующие входы которых подключены соответственно к первому и второму выходам блока 8 преобразования координат, при этом выходы первого 11 и второго 12 блоков сравнения через релейные элементы 13, 14 с гистерезисной характеристикой подключены соответственно к первому и второму входам управляемого логического коммутатора 15, выходы которого подключены непосредственно к входам управления ключевыми элементами силового преобразователя 3, а третий вход управляемого логического коммутатора 15 подключен непосредственно к выходу датчика положения 2, который выполнен имеющим на выходе цифровой сигнал в параллельном коде.
Блок 6 формирования заданных значений тока возбуждения и составляющих вектора тока статора по продольной и поперечной осям содержит третий блок сравнения 16, инвертирующий вход которого подключен к выходу датчика 10 скорости, а неинвертирующий вход этого блока сравнения 16 подключен к выходу датчика 17 интенсивности; четвертый блок 18 сравнения, подключенный неинвертирующим входом к установке 19 напряжения буферной аккумуляторной батареи, а инвертирующим входом к датчику 20 напряжения буферной аккумуляторной батареи, подключенной к соответствующим входам питания регулятора 7 тока возбуждения и силового преобразователя 3, при этом выходы третьего 16 и четвертого 18 блоков сравнения подключены соответственно к первому и второму входам блока 21 коммутации, выход которого подключен к первому входу вычислительного блока 22, причем второй вход этого блока подключен к выходу датчика 10 скорости, третьи входы подключены к выходам датчиков 5 фазного напряжения, четвертые входы подключены к выходам блока 8 преобразования координат, а управляющий вход блока 21 коммутации подключен к выходу логического элемента 23 "И" (&), первый вход которого через первый компаратор 24 подключен к выходу датчика 10 скорости, а второй вход через второй компаратор 25 подключен к датчику 26 нажатого состояния педали акселератора автомобиля, причем выход второго компаратора 25, подключен также ко входу датчика 17 интенсивности.
Вычислительный блок 22 содержит блоки вычисления входной мощности 27, модуля вектора напряжения 28 и тока 29 статора, блок 30 ограничения коэффициента связи, три блока 31, 32 и 33 суммирования, три блока 34, 35 и 36 сравнения, три пропорциональных регулятора 37, 38 и 39, три блока 40, 41 и 42 масштабирования, блок 43 задания постоянных сигналов, блок 44 вычисления модуля, блок 45 ограничения минимального значения, блоки деления 46 и умножения 47, при этом выход блока 27 вычисления входной мощности через первый блок 34 сравнения и первый пропорциональный регулятор 37 соединен с первым входом первого блока 31 суммирования, второй вход которого является первым входом вычислительного блока 22 и подключен к выходу блока 21 коммутации. Выходы датчиков 5 фазных напряжений статора через последовательно включенные блок 28 вычисления модуля вектора напряжения, второй блок 35 сравнения и второй пропорциональный регулятор 38 подключены к первому входу второго блока 32 суммирования, второй вход которого подключен к блоку 43 задания постоянного сигнала, а третий вход через последовательно включенные третий пропорциональный регулятор 39, третий блок 36 сравнения и блок 29 вычисления модуля вектора тока статора связан с соответствующими выходами блока 8 преобразования координат, и входом блока 44 вычисления модуля, выход которого подключен к первым входам блоков деления 46 и умножения 47, вторые входы которых через блок 30 ограничения коэффициента связи подключены к выходу второго блока 32 суммирования, причем второй вход блока 30 ограничения коэффициента связи подключен к выходу датчика 10 скорости, а выход блока 46 деления через первый блок 40 масштабирования подключен к неинвертирующему входу первого блока 11 сравнения, а через второй блок 41 масштабирования - к первому входу третьего блока 33 суммирования, второй вход которого через третий блок 42 масштабирования подключен к выходу блока 47 умножения, а выход третьего блока 33 суммирования через блок 45 ограничения минимального значения подключен ко входу регулятора 7 тока возбуждения, при этом выходы блока 43 задания постоянных сигналов подключены к соответствующим входам блоков 34, 35 и 36 сравнения, а входы блока 27 вычисления входной мощности подключены к выходам блоков 28, 29 вычисления модулей векторов напряжения и тока статора.
Работа устройства, реализующего предлагаемый способ управления, осуществляется следующим образом.
При нажатии водителем на педаль акселератора датчик 26 выдает сигнал и компаратор 25 переключается, выдавая единичное напряжение на первый вход логического элемента 23 "И" (&) и на вход датчика 17 интенсивности. Напряжение на выходе датчика 17 интенсивности начинает монотонно возрастать, поступая через последовательно включенные третий блок сравнения 16 и блок 21 коммутации на первый вход вычислительного блока 22. Выходной сигнал с первого выхода этого блока, являющегося и первым выходом блока 6 формирования заданных значений тока возбуждения и составляющих вектора тока статора по продольной и поперечной осям, поступает на вход регулятора 7 возбуждения, который формирует требуемые значения тока в обмотке возбуждения, а сигналы заданных значений составляющих вектора тока статора по продольной и поперечной осям, поступающие на неинвертирующие входы первого 11 и второго 12 блоков сравнения соответственно со второго и третьего выходов, сравниваются с их текущими значениями и по результатам сравнения на выходах релейных элементов 13, 14 формируются логические сигналы sign(Δid), sign(Δiq) соответственно (описание алгоритма формирования заданных значений токов приведено в приложении).
Работа устройства основана на функционировании векторного токового следящего контура в системе координат (d, q), ось d которой направлена по продольной оси ротора синхронной машины. Этот контур образован блоками 3, 4, 8, 11, 12, 13, 14, и 15 (фиг.1). Питание фазных обмоток осуществляется от силового преобразователя 3 с полностью управляемыми ключевыми элементами, которые в зависимости от знака команд управления (signUj, j=A, B, C) подключают фазные обмотки синхронной машины 1 к плюсовому или минусовому выводам буферной аккумуляторной батареи, поэтому фазные напряжения силового преобразователя 3, измеренные относительно средней точки, можно записать в виде
 ,
,
где Ud - напряжение буферной аккумуляторной батареи.
При этом обобщенный вектор U=(uα,uβ) выходного напряжения такого преобразователя будет описываться уравнением
 ,
,
где (eAα, eAβ), (eBα, eBβ), (eCα, eCβ) - проекции направляющих орт фаз A, B и C синхронной машины 1 на оси неподвижной ортогональной системы координат (α, β), ось α которой совпадает с направлением оси фазы A. На фиг.3 изображены шесть ненулевых векторов Um, (m=1, …, 6) выходного напряжения силового преобразователя 3, соответствующие различным комбинациям команд управления.
Отсюда видно, что плоскость α, β можно разбить на шесть секторов, в каждом из которых для раздельного регулирования Δid, Δiq достаточно использовать лишь четыре из шести ненулевых векторов Um (m=1, …, 6) выходного напряжения силового преобразователя 3. Например, если ротор находится во втором секторе (фиг.3), то переключения ключевых элементов силового преобразователя 3 в состояния, соответствующие U1 и U3, будут вызывать уменьшение текущего значения Δid, а переключения в состояния, соответствующие U4 и U6, будут вызывать увеличение текущего значения Δid. Аналогично, переключения в состояния, соответствующие U3 и U4, будут вызывать уменьшение текущего значения Δid, а переключения в состояния U1 и U6 будут вызывать увеличение текущего значения Δiq. Это обстоятельство и может быть положено в основу алгоритма функционирования векторного токового следящего контура в системе координат (d, q), который фактически сводится к составлению таблицы соответствия знаков фазных напряжений (signUj, j=A, B, C) знакам отклонений токов по продольной и поперечной осям sign(Δid), sign(Δiq) в зависимости от текущего положения (номера сектора) вращающейся системы координат (d, q) на плоскости α, β. Однако из фиг.3 видно, что переключения в состояния, соответствующие U1 и U6, фактически являются противоположными требуемому вектору U напряжения статора, что обуславливает «ускоренное» изменение Δid, Δiq по сравнению с тем случаем, если бы вместо переключений в состояния, соответствующие U1 и U6, производилось бы переключение в состояние, соответствующее нулевому значению модуля вектора выходного напряжения силового преобразователя. Следовательно, переключение в состояние, соответствующее нулевому значению модуля вектора выходного напряжения силового преобразователя, вместо переключений в состояния, соответствующие U1 и U6, положительно сказывается на уменьшении коммутационных потерь за счет снижения частоты переключений. Нулевому значению модуля вектора выходного напряжения силового преобразователя соответствует случай, если все ключи силового преобразователя включены в одинаковое положение, т.е. signUj=+1, j=A, B, C или signUj=-1, j=A, B, C. Причем для переключения в эти состояния требуется коммутация только в одной фазе силового преобразователя, а не в двух, как при использовании состояний, соответствующих U1 и U6, что тоже положительно сказывается на уменьшении коммутационных потерь в силовом преобразователе. При таком алгоритме формирования фазных напряжений силового преобразователя таблица соответствия знаков фазных напряжений (signUj, j=A, B, C) знакам отклонений токов по продольной и поперечной осям sign(Δid), sign(Δiq) в зависимости от текущего положения (номера сектора) вращающейся системы координат (d, q) на плоскости α, β будет иметь вид:
|
Например, если выходной сигнал релейного элемента 13 положительный, sign(Δid)=+1, выходной сигнал релейного элемента 14 отрицательный, sign(Δiq)=-1, то, как видно из таблицы, выходное напряжение силового преобразователя 3 будет соответствовать не U1, a U7 или U8, в зависимости от того, из какого состояния вектора выходного напряжения силового преобразователя будет происходить переключение. Из таблицы видно, что переключения в состояния, соответствующие нулевому значению модуля вектора выходного напряжения силового преобразователя, необходимы только при отрицательных значениях Δiq. Кроме того, если считать, что за время прохождения сектора, число переключений в оба состояния, соответствующие ненулевым значениям модуля вектора выходного напряжения силового преобразователя, примерно равны, то становится необязательным определять из какого состояния происходит переключение в состояние, соответствующее нулевому значению модуля вектора выходного напряжения силового преобразователя, так как, если всегда производить переключения только в состояния, соответствующие только U7 или только в U8, то все равно, как минимум, половина переключений будет производиться с «одной фазой». Последнее обстоятельство позволяет существенно упростить алгоритм, выбрав, например, переключения только в состояние, соответствующее U8.
Подключение выходов релейных элементов 13 и 14 непосредственно к входам управления ключевых элементов силового преобразователя 3 в соответствии с таблицей осуществляет управляемый логический коммутатор 15. Определение номера сектора производится по цифровому коду, снимаемому с выхода датчика положения 2.
Повышение энергетических показателей (минимизация дополнительных потерь в электродвигателе и силовом преобразователе) данного устройства по сравнению с известным обеспечивается за счет того, что при той же величине дополнительных потерь в синхронной машине, определяемой величиной пульсаций тока или, что то же самое, шириной петли гистерезиса релейных элементов 13, 14, достигается существенное снижение дополнительных потерь в силовом преобразователе 3 за счет уменьшения суммарного числа переключений в фазах.
Приложение
Осуществление формирования заданных значений токов возбуждения и составляющих вектора тока статора по продольной и поперечной осям, обеспечивающих работу машины с коэффициентом мощности, равным или близким к единице, при минимальных потерях в меди машины поясняется с помощью следующих известных соотношений (см. [3] стр.864)
где Lsd, Lsq - полная индуктивность статора, соответственно по продольной и поперечной осям;
Lmd - взаимная индуктивность обмоток статора и обмотки возбуждения по продольной оси;
Lf - полная индуктивность обмотки возбуждения;
id, iq - составляющие вектора  тока статора по продольной и поперечной осям соответственно;
тока статора по продольной и поперечной осям соответственно;
Ψd, Ψq - составляющие вектора потокосцепления статора по продольной и поперечной осям соответственно;
if, Ψf - ток и потокосцепление обмотки возбуждения.
В соответствии с известным из описания к патенту RU 2188964, МПК7 F02N 11/04, публ. 10.09.2002 г. способом управления стартер-генератором вводим новую переменную  , называемую в дальнейшем коэффициентом связи, тогда с учетом (1) и условием равенства единице коэффициента мощности получаем
, называемую в дальнейшем коэффициентом связи, тогда с учетом (1) и условием равенства единице коэффициента мощности получаем

Развиваемый машиной момент M равен:

Так как Ψd при переходе из двигательного режима машины в генераторный и наоборот не должно изменять свой знак, то следовательно signK=signiq и составляющая id всегда отрицательна, а ток в обмотке возбуждения if всегда положительный.
Потери Pм в меди машины при фиксированном значении момента имеют вид
где Rs и Rf - активные сопротивления обмоток статора и обмотки возбуждения соответственно.
Из уравнения (5) видно, что существует такое значение коэффициента связи (будем называть его Kопт), при котором потери в меди минимальны.
Это значение коэффициента связи всегда можно получить из условия:
dPM/dK=0
Так как в реальных системах всегда существуют ограничения, налагаемые на величину напряжения и фазного тока силового преобразователя, то целесообразно получить зависимость ω=f(M), определяющую зону возможной работы машины с K=Kопт и с учетом налагаемых ограничений.
Используя известные дифференциальные уравнения (см, [3] стр.865), не трудно убедиться, что в статическом режиме работы составляющие вектора напряжения статора имеют вид:

Из уравнений (1), (4) и (6) получаем

Знак "+" соответствует двигательному режиму работы, а "-" - генераторному.
Для расчета зоны возможной работы машины с минимумом потерь в меди можно построить кривую ω=f(М) при K=Kопт (фиг.4, кривая АБ). Эта зона ограничена сверху максимально допустимой скоростью ротора ωmax, а справа - максимальным моментом M1, который определяется из уравнения (4) при K=Kопт и  . Но, как видно из уравнения (4), максимальный момент достигается не при K=Kопт, а при K>Kопт. Естественно, что при этом потери в меди возрастают, но тем не менее при том же токоограничении можно будет получить большие моменты, что немаловажно для пусковых режимов в зимних условиях. Максимальное значение коэффициента связи Kmax можно вычислить из уравнения (3), выразив iq через
. Но, как видно из уравнения (4), максимальный момент достигается не при K=Kопт, а при K>Kопт. Естественно, что при этом потери в меди возрастают, но тем не менее при том же токоограничении можно будет получить большие моменты, что немаловажно для пусковых режимов в зимних условиях. Максимальное значение коэффициента связи Kmax можно вычислить из уравнения (3), выразив iq через  , при if=ifmax и
, при if=ifmax и  . При этом значении Kmax и заданном токоограничении
. При этом значении Kmax и заданном токоограничении  уравнение (4) дает максимальное значение момента, развиваемого машиной Mmax (фиг.4).
уравнение (4) дает максимальное значение момента, развиваемого машиной Mmax (фиг.4).
Из уравнения (7) видно, что при фиксированном моменте и  дальнейшее возрастание скорости возможно только за счет уменьшения значений коэффициента связи K ниже Kопт, причем это также ведет к возрастанию потерь в меди машины. Очевидно, что минимальная величина коэффициента связи Kmin определяется из уравнения (7) при
дальнейшее возрастание скорости возможно только за счет уменьшения значений коэффициента связи K ниже Kопт, причем это также ведет к возрастанию потерь в меди машины. Очевидно, что минимальная величина коэффициента связи Kmin определяется из уравнения (7) при  ,
и ω=ωmax. Умножив уравнение (7) на M, можно сделать вывод, что предельное значение мощности Pmax, развиваемой машиной, не зависит от величины коэффициента связи, а определяется только величиной активного сопротивления обмоток статора и заданными ограничениями -
,
и ω=ωmax. Умножив уравнение (7) на M, можно сделать вывод, что предельное значение мощности Pmax, развиваемой машиной, не зависит от величины коэффициента связи, а определяется только величиной активного сопротивления обмоток статора и заданными ограничениями -  и
и 

Уравнению (8) соответствует гипербола СД на фиг.4. Значения коэффициента связи, соответствующие гиперболе СД (будем обозначать их Kгр), обратно пропорциональны угловой скорости вращения ротора и определяются из (7) при
и

Таким образом, из фиг.4 видно, что в отношении величины коэффициента связи К имеется три зоны.
Зона 1 ограничена осями ω, M, максимальной скоростью ωmax, кривой АБ и моментом M1 (на фиг.4 не заштрихована). Это зона, в которой при заданных ограничениях
и
возможно выполнение минимума потерь в меди машины. Величина K в этой зоне должна быть постоянная и равна Kопт.
Зона 2 ограничена гиперболой СД, моментами M1, Mmax и осью M. В этой зоне, при увеличении заданного момента, коэффициент связи должен меняться от K=Kопт до K=Kmax в функции поддержания тока статора на уровне  .
.
Зона 3 ограничена кривой АБ, гиперболой СД и максимальной скоростью ωmax. В этой зоне, при увеличении заданной скорости или момента, коэффициент связи должен изменяться от K=Kопт до K=Kmin в функции поддержания вектора напряжения на уровне
.
Таким образом, при учете влияния ограничения тока ключевых элементов силового преобразователя необходимо увеличить значение коэффициента связи K, начиная от значения Kопт до тех пор, пока ток в статорных обмотках не уменьшится до допустимых значений. Эти функции осуществляются третьим блоком 36 сравнения и третьим пропорциональным регулятором 39, нижний уровень выходного сигнала которого равен нулю (фиг.2). Аналогичным образом следует поступать и при учете ограничения напряжения. Эти функции осуществляются вторым блоком 35 сравнения и вторым пропорциональным регулятором 38, верхний уровень выходного сигнала которого равен нулю. Блок 30 ограничения коэффициента связи имеет коэффициент передачи, равный единице. Он обеспечивает ограничение максимальной величины своего выходного сигнала (т.е. величины коэффициента связи K) в функции скорости на уровне, соответствующем K=Kгр, причем максимальное значение Kгр равно Kmax, а минимальное - Кmin. Кроме того, величина выходного сигнала блока 30 в третьей зоне лежит в пределах от Kгр до Kопт, а во второй зоне - от Kопт до Kmax. Первый блок 40 масштабирования имеет коэффициент передачи, равный отношению Lsq к Lsd, причем сигнал на его выходе инвертируется, поэтому выходной сигнал блока 40 равен izd (в соответствии с уравнением (2)). Коэффициент передачи блока 41 масштабирования равен отношению Lsq к Lmd, а коэффициент передачи блока 42 масштабирования - отношению Lsd к Lmd, поэтому сигнал на выходе третьего блока 33 суммирования равен заданному значению тока izf в соответствии с уравнением (3). В то же время может оказаться, что предельная мощность синхронной машины с учетом ограничений  и
и  превышает допустимое значение мощности бортовой аккумуляторной батареи. Это ограничение не должно вызывать изменения величины коэффициента связи K. Поэтому ограничение мощности, потребляемой от бортовой аккумуляторной батареи, осуществляется за счет уменьшения заданного значения составляющей iq, т.е. за счет уменьшения развиваемого машиной момента. Эти функции осуществляются первым блоком 31 суммирования, первым пропорциональным регулятором 37, первым блоком 34 сравнения и блоком 27 вычисления входной мощности, на входы которого поступают сигналы Iн и Uн, пропорциональные току и напряжению бортовой аккумуляторной батареи.
превышает допустимое значение мощности бортовой аккумуляторной батареи. Это ограничение не должно вызывать изменения величины коэффициента связи K. Поэтому ограничение мощности, потребляемой от бортовой аккумуляторной батареи, осуществляется за счет уменьшения заданного значения составляющей iq, т.е. за счет уменьшения развиваемого машиной момента. Эти функции осуществляются первым блоком 31 суммирования, первым пропорциональным регулятором 37, первым блоком 34 сравнения и блоком 27 вычисления входной мощности, на входы которого поступают сигналы Iн и Uн, пропорциональные току и напряжению бортовой аккумуляторной батареи.
Таким образом, описанный способ формирования заданных значений тока возбуждения и составляющих вектора тока статора по продольной и поперечной осям позволяет предельно использовать синхронную машину с электромагнитным возбуждением как в двигательном, так и в генераторном режимах во всем диапазоне возможных скоростей и нагрузок с учетом реальных ограничений по току и напряжению. Существенно, что требуемые значения скоростей и моментов достигаются автоматически при минимально возможных в данной точке потерях в меди машины.
Способ управления мотор-генератором на основе синхронной машины, заключающийся в том, что измеряют текущие значения напряжения бортовой аккумуляторной батареи, фазных токов и напряжений, а также скорости и углового положения ротора и с учетом выходных сигналов датчиков положения педалей тормоза и акселератора автомобиля формируют заданные значения составляющих вектора тока статора по продольной и поперечной осям в неподвижной относительно ротора ортогональной системе координат (d, q), ось d которой направлена по продольной оси ротора синхронной машины, а также заданное значение тока возбуждения, которое затем формируют в обмотке возбуждения с помощью регулятора тока возбуждения, в функции поддержания коэффициента мощности, равным или близким к единице, затем измеренные фазные токи переводят в неподвижную относительно ротора ортогональную систему координат (d, q), ось d которой направлена по продольной оси ротора, сравнивают их с заданными, определяют знаки отклонений текущих значений токов от заданных и по этим знакам определяют требуемые мгновенные знаки фазных напряжений, при этом, если в данный момент времени ось d находится в секторе -30÷+30 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, если в данный момент времени ось d находится в секторе +30÷+90 электрических градусов относительно оси фазы “A”, то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают положительным, если в данный момент времени ось d находится в секторе +90÷+150 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают положительным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, если в данный момент времени ось d находится в секторе +150÷+210 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают отрицательным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, если в данный момент времени ось d находится в секторе +210÷+270 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают положительным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают отрицательным, если в данный момент времени ось d находится в секторе +270÷+330 электрических градусов относительно оси фазы "A", то в случае положительных значений отклонений текущих значений токов от заданных знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают отрицательным, а знак напряжения фазы "C" устанавливают отрицательным, в случае отрицательного знака отклонения текущего значения тока от заданного по продольной оси и положительного знака отклонения тока по поперечной оси знак напряжения фазы "A" устанавливают положительным, знак напряжения фазы "B" устанавливают положительным, а знак напряжения фазы "C" устанавливают отрицательным, отличающийся тем, что в любом из шести секторов от -30÷+330 электрических градусов в случае отрицательных значений отклонений текущих значений токов от заданных и в случае положительного знака отклонения текущего значения тока от заданного по продольной оси и отрицательного знака отклонения тока по поперечной оси знаки всех фазных напряжений устанавливают одинаковыми.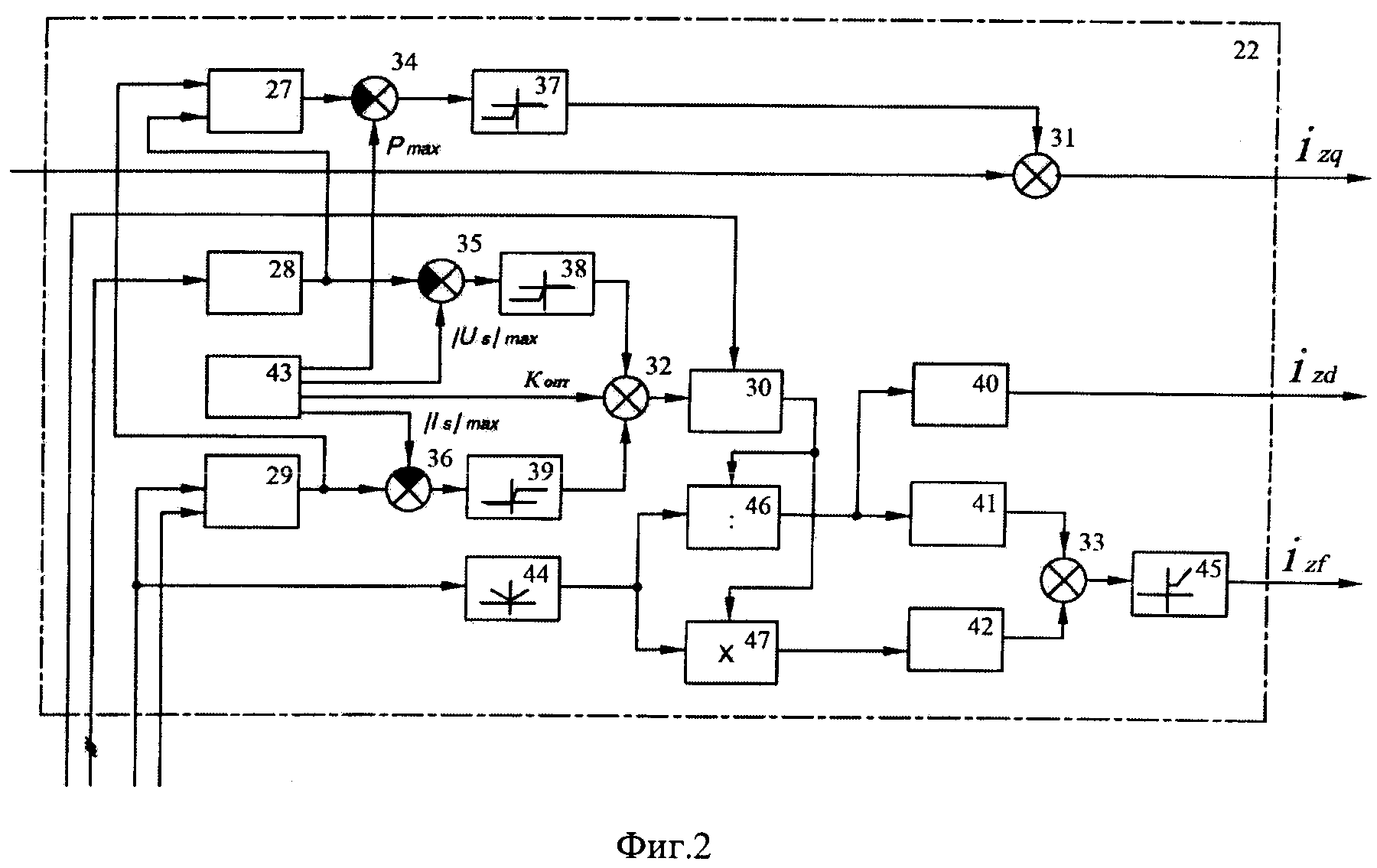
Система турбонаддува тепловозного двс с двумя степенями регулируемого наддува
Способ настройки положения резца токарного станка
Устройство для изготовления цилиндрических заготовок формы стакан
Способ отрезки заготовок от рулона листового материала для штамповки крупных панелей (варианты)
Способ изготовления полой металлической панели, предназначенной для соединения ее с корпусом судна
Устройство определения параметров поля температуры в объеме водной среды, возмущенной движением корпуса судна или модели
Способ изготовления обтекателя гидроакустической станции методом намотки
Устройство с пониженным коэффициентом отражения радиоволн в широком диапазоне частот
Устройство термостабилизации и отвода тепла от электронных модулей радиотелевизионной аппаратуры
Способ вырубки заготовок для штамповки крупногабаритных панелей (варианты)
Турбокомпрессор с регулируемым наддувом
Устройство для буксировочных испытаний масштабных моделей надводных судов на открытом водоеме
Способ оценки качества электромагнитного экранирования узла уплотнения отверстия в электропроводящем экране с закрывающей его электропроводящей конструкцией
Устройство виброизоляции валопровода с подшипниками и гребным винтом от корпуса судна
Способ локализации областей акустического излучения
Гибкая протяженная приемная гидроакустическая антенна
Устройство электромагнитной защиты экранированных помещений
Устройство получения регулируемого по частоте напряжения на выходе многофазного генератора переменного тока с постоянной частотой вращения вала
Вибродемпфирующее устройство для корпуса транспортного средства
Устройство контроля тепловых режимов силовых модулей преобразователя

