Результат интеллектуальной деятельности: СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ
Вид РИД
Изобретение
Изобретение относится к области вооружения и военной техники, в частности к системам управления и стабилизации вооружения (далее - СУСВ) боевых модулей машин типа танков, БМП, БТР, БРДМ и т.п., а также дистанционно управляемых боевых модулей систем вооружения, имеющих в своем составе стабилизатор вооружения (далее по тексту - СВ) с необходимым набором датчиковой аппаратуры, в том числе и датчик(и) положения (далее по тексту - ДП) установленного вооружения.
Известен стабилизатор вооружения ИЦКР.461314.001 (индекс 2Э52-2) БМП-3 [1], описанный в техническом описании ИЦКР.461314.001 ТО, привод вертикального наведения (далее по тексту - ВН) которого (см. рис. 1 стр. 97 ИЦКР.461314.001 ТО - функциональная схема привода ВН СВ) содержит датчик положения ИЦКР.468331.001 (см. п.6.4 стр.32, рис.6 - описание конструкции).
Структурная схема стабилизатора вооружения СУСВ изображена на фиг. 1. Данный стабилизатор вооружения принят за прототип.
(См. Боевая машина пехоты БМП-3. Техническое описание и инструкция по эксплуатации. Часть 1 и 2. Воениздат, Москва, 1998 г.).
Стабилизатор вооружения состоит из приводов горизонтального (далее по тексту - ГН) и вертикального наведения и стабилизации, привод ВН которого, в свою очередь, содержит датчик положения ИЦКР.468331.001.
Принципы работы приводов ВН и ГН в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением.
Стабилизатор вооружения, принятый за прототип, представляет собой автономные приводы по ГН и ВН, обеспечивающие наведение и стабилизацию основного вооружения боевого модуля БМП-3 в плоскостях ГН и ВН по сигналам, поступающим от СУСВ и ДП установленного вооружения по ВН. При этом ошибка для привода ВН, формируемая блоком управления стабилизатора вооружения, представляет собой алгебраическую разность между заданным сигналом угла по ВН, поступающим из СУСВ, и фактическим сигналом углового положения установленного вооружения по ВН, поступающим от ДП.
Датчик положения (ДП) 1 стабилизатора вооружения - прототипа выполнен в едином корпусе, в котором установлены:
- вращающийся трансформатор (ВТ) 2, состоящий из статора (ВТ-С) 3 и ротора (ВТ-Р) 4 и представляющий собой электрическую микромашину переменного тока, предназначенную для преобразования угла поворота собственного ротора в напряжение, пропорциональное функциям угла (sinα и cosα);
- червячный редуктор (4P) 5, состоящий из червячного колеса, соосно жестко закрепленного на статоре вращающегося трансформатора (ВТ-С) 3, и вращающегося перпендикулярно его оси червячного колеса, механически связанного с корпусом (ДП) 1. Червячный редуктор (4P) 5 используется для выставки нулевого положения (ВТ) 2 (ДП) 1 при его настройке в составе боевого модуля (БМ) 6 с установленным вооружением (В) 7;
- механизм стопорения (МС) 8 механически связан с червячным колесом червячного редуктора (4P) 5 и корпусом (ДП) 1 и состоит из винта и контргайки, обеспечивающих фиксацию статора (ВТ-С) 3 относительно корпуса (ДП) 1 после проведения настройки нулевого положения (ВТ) 2 в составе боевого модуля (БМ) 6;
- муфта 9 состоит из двух полумуфт и крестовины и необходима для исключения несоосности и непараллельности оси цапф установленного вооружения (В) 7 и оси ротора (ВТ-Р) 4 вращающегося трансформатора (ВТ) 2. Муфта 9 выполнена по безлюфтовой схеме, что необходимо для обеспечения заданных параметров по точности передачи углового положения между установленным вооружения (В) 7 и осью ротора (ВТ-Р) 4 вращающегося трансформатора (ВТ) 2. Одна полумуфта жестко закреплена на роторе (ВТ-Р) 4 и через крестовину механически связана с второй полумуфтой, жестко закрепленной на оси цапф установленного вооружения (В) 7.
Питание датчика положения (ДП) 1 осуществляется переменным напряжением 27 В 400 Гц, формируемым блоком управления комплекса 1К13 (БУК) 10, который, в свою очередь, запитан напряжением 36 В 400 Гц от преобразователя напряжения (ПТ) 11, подключенного к бортовой сети +27 В объекта военного назначения (далее - ОВН). Переменное напряжение 27 В 400 Гц, сформированное блоком управления комплекса 1К13 (БУК) 10, подается в блок управления (БУ) 12 стабилизатора вооружения (СВ) 13 и далее на вращающийся трансформатор (ВТ) 2 датчика положения (ДП) 1.
Сигнал с ротора (ВТ-Р) 4, снимаемый через механические контактные кольца статора (ВТ-С) 3, пропорциональный функции угла sinα отклонения установленного вооружения (В) 7, поступает в блок управления (БУ) 12 стабилизатора вооружения (СВ) 13 системы управления и стабилизации вооружения (СУСВ) 14, где используется для решения комплексной задачи стабилизации и наведения установленного вооружения (В) 7 в плоскости ВН.
Недостатками вышеуказанного СВ с датчиком положения-прототипа являются:
- необходимость использования дополнительного источника питания переменного напряжения 36 В 400 Гц, что недопустимо в соответствии с требованиями, предъявляемыми к современным СВ СУСВ;
- плохая помехозащищенность переменного слаботочного сигнала формируемого ВТ ДП из-за наличия большой длины сигнальных цепей между выходным разъемом ДП и схемой обработки сигнала, находящейся в блоке управления СВ;
- недостаточная точность измерения углового положения самого ВТ (точность 3 угловые минуты), что не обеспечивает требования по точности, предъявляемые к современным СВ СУСВ;
- наличие контактных колец для обеспечения токосъема с роторных обмоток ВТ, что снижает надежность его работы и в целом СВ;
- отсутствие информационных каналов обмена ДП, что не позволяет оперативно и дистанционно проводить его настройку и диагностику в составе СВ объекта военного назначения;
- наличие редуктора для механической выставки нулевого положения датчика положения при его настройке в составе СВ ОВН с СУСВ, что усложняет конструкцию ДП, снижает точность первоначальной выставки, а также требует дополнительных трудозатрат и контроля при настройке ДП.
Техническими задачами заявляемого изобретения являются:
- исключение необходимости использования для работы ДП в составе СВ дополнительного источника питания переменного напряжения 27 В (36 В) 400 Гц;
- повышение помехозащищенности сигнала, формируемого ВТ ДП в составе СВ;
- повышение точности измерения углового положения ДП в составе СВ (до уровня 2,5 угловых секунд);
- повышение надежности работы СВ с ДП;
- введение современных информационных каналов обмена ДП в составе СВ с внешними устройствами;
- повышение эксплуатационной интероперабельности СВ с ДП;
- исключение редуктора для механической выставки нулевого положения ДП в составе СВ.
Для достижения указанного технического результата в известный стабилизатор вооружения (СВ) боевого модуля (БМ) системы управления и стабилизации установленного вооружения (СУСВ), содержащий блок управления (БУ), привод ГН, привод ВН с датчиком положения (ДП), включающим в себя вращающийся трансформатор (ВТ), состоящий из статора (ВТ-С), механически соединенного с корпусом вращающегося трансформатора (ВТ), и ротора (ВТ-Р), муфту, механически соединенную с ротором (ВТ-Р) и установленным вооружением (В) боевого модуля (БМ), отличающийся тем, что в него дополнительно введены первая последовательная шина, электрически соединенная с блоком управления, вторая последовательная шина, электрически соединенная с системой управления и стабилизации вооружения, а в датчик положения дополнительно введены:
- модуль питания датчика положения (МП-ДП);
- усилитель переменного напряжения (У);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования (М-АЦП);
- тактовый генератор (ТГ);
- цифро-налоговый преобразователь (ЦАП);
- генератор синуса (ГС);
- модуль вычисления угла шкалы грубого отсчета (ВУ-ГО);
- модуль вычисления угла шкалы точного отсчета (ВУ-ТО);
- модуль вычисления угла датчика положения (ВУ-ДП);
- модуль базового адреса датчика положения (БА-ДП);
- постоянное запоминающее устройство (ПЗУ);
- блок компенсации неточности передачи угла (БК);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN);
- формирователь сигналов последовательной шины канала типа RS422 (ФСПШ RS422),
причем вращающийся трансформатор (ВТ) реализован на базе бесконтактного многополюсного двухотсчетного индукционного редуктосина с синусными и косинусными обмотками грубого и точного отсчета,
при этом статор (ВТ-С) вращающегося трансформатора (ВТ) датчика положения (ДП) электрически соединен с модулем аналого-цифрового преобразования (М-АЦП) контроллера (К), тактовый генератор (ТГ) контроллера (К) соединен с модулем аналого-цифрового преобразования (М-АЦП), модулем цифроаналогового преобразователя (ЦАП) и модулем генератора синуса (ГС), который, в свою очередь, соединен с модулем цифроаналогового преобразователя (ЦАП), а выход модуля цифроаналогового преобразователя (ЦАП) контроллера (К) электрически соединен с первым входом усилителя переменного напряжения (У) датчика положения (ДП), при этом выход с усилителя переменного напряжения (У) электрически соединен со статором (ВТ-С) вращающегося трансформатора (ВТ), первый выход модуля аналого-цифрового преобразования (М-АЦП) соединен с модулем вычисления угла шкалы грубого отсчета (ВУ-ГО), а второй его выход соединен с модулем вычисления угла шкалы точного отсчета (ВУ-ТО), в свою очередь, выход модуля вычисления угла шкалы грубого отсчета (ВУ-ГО) соединен с модулем вычисления угла (ВУ-ДП) датчика положения, а выход модуля вычисления угла шкалы точного отсчета (ВУ-ТО) также соединен с модулем вычисления угла (ВУ-ДП) датчика положения,
при этом первый выход модуля вычисления угла датчика положения соединен с формирователем сигналов последовательной шины, например, канала типа CAN, а второй его выход соединен с формирователем сигналов последовательной шины, например, канала типа RS422,
в свою очередь, первый выход постоянного запоминающего устройства (ПЗУ) соединен с формирователем сигналов последовательной шины, например, канала типа CAN, второй его выход соединен с формирователем сигналов последовательной шины, например, канала типа RS422, третий его выход соединен с модулем вычисления угла датчика положения (ВУ-ДП), а четвертый выход соединен с блоком компенсации неточности передачи угла (БК), который связан с модулем вычисления угла (ВУ-ДП) датчика положения,
при этом вход модуля базового адреса (БА-ДП) датчика положения электрически связан со стабилизатором вооружения, первый выход модуля базового адреса датчика положения соединен с формирователем сигналов последовательной шины, например, канала типа CAN, второй его выход соединен с формирователем сигналов последовательной шины, например, канала типа RS422, третий его выход соединен с системой управления и стабилизации вооружения (СУСВ), в свою очередь, модуль питания датчика положения (МП-ДП) электрически соединен с контроллером (К), вторым входом усилителя переменного напряжения (У) датчика положения и выходом блока управления (БУ) стабилизатора вооружения (СВ),
при этом формирователь сигналов последовательной шины, например, канала типа CAN электрически соединен с первой последовательной шиной (ПШ1) стабилизатора вооружения (СВ), а формирователь сигналов последовательной шины, например, канала типа RS422 электрически соединен со второй последовательной шиной (ПШ2) системы управления и стабилизации вооружения.
Сопоставительный анализ с прототипом показывает, что в заявляемый стабилизатор вооружения (СВ) с датчиком положения (ДП) системы управления и стабилизации вооружения (СУСВ) введены новые компоненты, а именно:
- модуль питания датчика положения (МП-ДП);
- усилитель переменного напряжения (У);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования (М-АЦП);
- тактовый генератор (ТГ);
- цифро-налоговый преобразователь (ЦДЛ);
- генератор синуса (ГС);
- модуль вычисления угла шкалы грубого отсчета (ВУ-ГО);
- модуль вычисления угла шкалы точного отсчета (ВУ-ТО);
- модуль вычисления угла датчика положения (ВУ-ДП);
- модуль базового адреса датчика положения (БА-ДП);
- постоянное запоминающее устройство (ПЗУ);
- блок компенсации неточности передачи угла датчика положения (БК);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN);
- формирователь сигналов последовательной шины канала типа RS422 (ФСПШ RS422),
в стабилизатор вооружения (СВ) дополнительно введена:
- первая последовательная шина (ПШ1),
в систему управления и стабилизации вооружения дополнительно введена:
- вторая последовательная шина (ПШ2),
их связями с другими элементами СУСВ и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в заявляемый стабилизатор вооружения (СВ) с датчиком положения (ДП) позволяет:
- исключить необходимость использования для работы датчика положения (ДП) в составе СВ дополнительного источника питания переменного напряжения 27 В 400 Гц за счет использования встроенного в контроллер (К) датчика положения (ДП) генератора синуса (ГС), сигнал с которого путем цифроаналоговоого преобразования в модуле (ЦАП) поступает в усилитель переменного напряжения (У) и далее на обмотки возбуждения вращающегося трансформатора (ВТ), позволяя таким образом исключить внешнюю запитку датчика;
- повысить помехозащищенность сигнала, формируемого датчиком положения (ДП) в составе СВ за счет местной (внутренней) обработки слаботочных аналоговых сигналов, формируемых ВТ с последующей передачей значения углового положения ДП с использованием последовательных шин передачи данными типа CAN и RS422, которые, в свою очередь, менее подвержены внешнему воздействию, чем передача слаботочных аналоговых сигналов;
- повысить точность измерения углового положения датчиком положения (ДП) в составе СВ за счет:
- использования в ДП в составе СВ многополюсного двухотсчетного вращающегося трансформатора (ВТ) повышенной точности с синусными и косинусными обмотками грубого и точного отсчета, позволяющими, используя заложенные в контроллере (К) датчика положения (ДП) алгоритмы обработки сигналов, получить дискретность младшего значащего разряда, соответствующую 2,5 угловым секундам;
- повысить надежность работы СВ с датчиком положения (ДП) за счет применения вращающегося трансформатора (ВТ), выполненного по электрической схеме типа редуктосин без использования контактных колец для обеспечения токосъема с роторных обмоток вращающегося трансформатора (ВТ);
- ввести современные информационные каналы обмена и передачи данных типа CAN и RS422 в СВ с датчиком положения (ДП) с внешними устройствами ОВН;
- повысить эксплуатационную интероперабельность СВ с датчиком положения (ДП) за счет:
- введения высокоскоростных цифровых информационных каналов обмена данных типа CAN и RS422 с внешними устройствами ОВН, что, в свою очередь, позволяет повысить функциональные и эксплуатационные характеристики СВ СУСВ с примененным датчиком, а также дает возможность установки СВ с датчиком положения (ДП) на другие ОВН без существенной их доработки и в сжатые сроки;
- введения во внутреннюю структуру СВ с датчиком положения (ДП) цифровых информационных каналов обмена типа CAN и RS422, позволяющих проводить настройку и диагностику СВ с датчиком положения (ДП) при помощи встроенных средств, а также при наличии более одного ДП в составе СВ СУСВ автоматически устанавливать из СВ адрес каждого датчика положения (ДП) с привязкой его к вооружению, с которым он непосредственно (механически) связан;
- записи в ПЗУ ДП в составе СВ его собственной служебной информации (наименование датчика, версия программного обеспечения, заводской номер, коды ошибок и т.д.), что позволяет по запросу от СВ и СУСВ выдавать указанную информацию о датчике(ах) на видеосмотровое(ые) устройство(а) оператора(ов).
- исключить редуктор для механической выставки нулевого положения датчика положения (ДП) в составе СВ при установке датчика положения (ДП) на ОВН за счет возможности установки нулевого положения датчика программным способом, либо используя последовательный канал из блока управления (БУ) стабилизатора вооружения (СВ) (при его настройке собственными технологическими средствами), либо через последовательный канал системы управления вооружением (СУСВ), имеющей встроенные средства настройки СВ. Это дает возможность установить нулевое положение датчика положения (ДП) в составе СВ с высокой точностью, соответствующей 2,5 угловым секундам.
Предлагаемое изобретение позволяет улучшить технические и эксплутационные характеристики стабилизатора вооружения СУСВ боевых модулей указанных выше боевых машин и боевых модулей дистанционно управляемых систем вооружения, решить вопросы по их оперативной настройке и диагностике, а также диагностике датчика положения в составе СВ, что достигается применением в предлагаемом СВ блоке управления (БУ) и датчике положения (ДП) цифрового контроллера, разработанного на новой элементной базе, построенной на современной цифровой платформе с использованием высокоскоростных цифровых информационных каналов обмена данных типа CAN и RS422 с внешними устройствами ОВН.
Устройство и работа заявляемого изобретения поясняются чертежами.
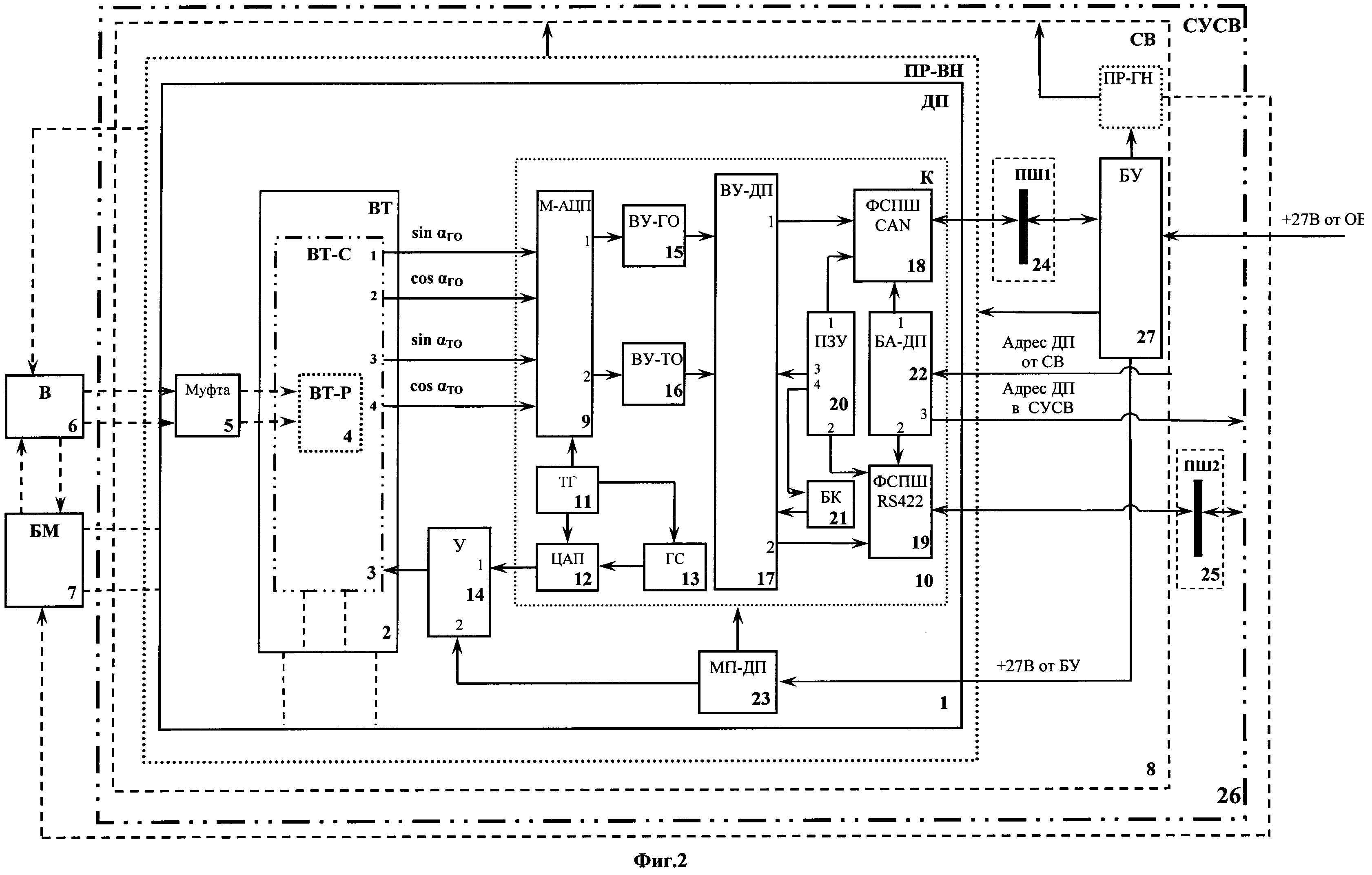
На фиг. 1 приведена структурная схема СВ с датчиком положения (ДП)-прототипа; на фиг. 2 приведена заявляемая структурная схема СВ с датчиком положения (ДП).
Сокращения, принятые в тексте и на фиг. 1 и 2:
БА-ДП - модуль базового адреса датчика положения;
БК - блок компенсации неточности передачи угла датчика положения;
БМ - боевой модуль;
БУ - блок управления стабилизатора вооружения;
БУК - блок управления комплекса 1К13;
В - установленное вооружение;
ВН - вертикальное наведение;
ВУ-ГО - модуль вычисления угла шкалы грубого отсчета;
ВУ-ТО - модуль вычисления угла шкалы точного отсчета;
ВУ-ДП - модуль вычисления угла датчика положения;
ВТ - вращающийся трансформатор;
ВТ-С - статор вращающегося трансформатора;
ВТ-Р - ротор вращающегося трансформатора;
ГН - горизонтальное наведение;
ГС - генератор синуса,
ДП - датчик положения;
К - контроллер;
М-АЦП - модуль аналого-цифрового преобразования;
МП-ДП - модуль питания датчика положения;
МС - механизм стопорения статора вращающегося трансформатора;
ЗУ - постоянное запоминающее устройство;
ПШ - последовательная шина;
ПТ - преобразователь напряжения;
СВ - стабилизатор вооружения;
СУСВ - система управления и стабилизации вооружения;
ТГ- тактовый генератор;
У - усилитель переменного напряжения;
ФСПШ CAN - формирователь сигналов последовательной шины канала типа CAN;
ФСПШ RS422 - формирователь сигналов последовательной шины канала типа RS422;
ЦАП - модуль цифро-налогового преобразователя;
4P - червячный редуктор для настройки нулевого положения ДП;
cosα го - электрический сигнал с косинусной обмотки грубого отсчета вращающегося трансформатора;
cosα то - электрический сигнал с косинусной обмотки точного отсчета вращающегося трансформатора;
sinα го - электрический сигнал с синусной обмотки грубого отсчета вращающегося трансформатора;
sinα то - электрический сигнал с синусной обмотки точного отсчета вращающегося трансформатора.
Стабилизатор вооружения, содержащий привода ВН и ГН системы управления и стабилизации вооружения боевого модуля, включающий датчики положения, входящие в привода ВН и ГН, служит для наведения стабилизации и управления установленного вооружения боевого модуля.
Датчик положения (ДП) 1 содержит вращающийся трансформатор (ВТ) 2, выполненный в виде плоской электрической машины, представляющей собой сердечник статора (ВТ-С) 3 с обмотками и безобмоточным ротором (ВТ-Р) 4. При этом статор (ВТ-С) 3 жестко механически связан с корпусом вращающегося трансформатора (ВТ) 2, а ротор (ВТ-Р) 4 кинематически через подшипниковый узел связан со статором (ВТ-С) 3. Ротор (ВТ-Р) 4 механически связан с безлюфтовой муфтой 5, которая, в свою очередь, механически связана с установленным вооружением (В) 6. Муфта 5 состоит из двух полумуфт и крестовины и необходима для исключения несоосности и непараллельности оси цапф установленного вооружения (В) 6 и оси ротора (ВТ-Р) 4 вращающегося трансформатора (ВТ) 2. Муфта 5 выполнена по безлюфтовой схеме, что необходимо для обеспечения заданных параметров по точности передачи углового положения между установленным вооружения (В) 6 и осью ротора (ВТ-Р) 4 вращающегося трансформатора (ВТ) 2. При этом первая полумуфта жестко закреплена на роторе (ВТ-Р) 4 и через крестовину механически связана со второй полумуфтой, жестко закрепленной на оси цапф установленного вооружения (В) 6.
Боевой модуль (БМ) 7 кинематически через цапфенный узел связан с установленным вооружением (В) 6 и жестко механически связан с корпусом датчика положения (ДП) 1, который, в свою очередь, механически связан с корпусом вращающегося трансформатора (ВТ) 2, при этом привод стабилизатора вооружения (СВ) 8 воздействует на установленное вооружение (В) 6, поворачивая его относительно боевого модуля (БМ) 7.
Статор (ВТ-С) 3 вращающегося трансформатора (ВТ) 2 датчика положения (ДП) 1 электрически соединен с модулем аналого-цифрового преобразования (М-АЦП) 9 контроллера (К) 10 датчика положения (ДП) 1, причем с первого выхода вращающегося трансформатора (ВТ) 2 передается сигнал с синусной обмотки грубого отсчета (sinα го) вращающегося трансформатора (ВТ) 2, со второго выхода вращающегося трансформатора (ВТ) 2 передается сигнал с косинусной обмотки грубого отсчета (cosα го) вращающегося трансформатора (ВТ) 2, с третьего выхода вращающегося трансформатора (ВТ) 2 передается сигнал с синусной обмотки точного отсчета (sinα то) вращающегося трансформатора (ВТ) 2, а с четвертого выхода вращающегося трансформатора (ВТ) 2 передается сигнал с косинусной обмотки точного отсчета (cosα то) вращающегося трансформатора (ВТ) 2. Получаемые, таким образом, от статора (ВТ-С) 3 сигналы пропорциональны синусу и косинусу угла поворота ротора (ВТ-Р) 4 вращающегося трансформатора (ВТ) 2.
Тактовый генератор (ТГ) 11 контроллера (К) 10 генерирует электрические импульсы прямоугольной формы с заданной частотой и необходим для синхронизации работы соединенных с ним модулем аналого-цифрового преобразования (М-АЦП) 9, модулем цифро-налогового преобразователя (ЦАП) 12 и модулем генератора синуса (ГС) 13.
Модуль генератора синуса (ГС) 13 контроллера (К) 10 представляет собой цифровой генератор синусоидального напряжения, частота которого прямо пропорциональна выходной частоте тактового генератора (ТГ) 11. Полученный на выходе модуля генератора синуса (ГС) 13 сигнал представляет собой цифровой код чисел, описывающих синусоидальный закон изменения.
Модуль генератора синуса (ГС) 13 соединен с модулем цифроаналогового преобразователя (ЦАП) 12, преобразующим полученный код числа в аналоговый сигнал переменного синусоидального напряжения.
Преобразованный модулем цифроаналогового преобразователя (ЦАП) 12 слаботочный аналоговый сигнал переменного синусоидального напряжения поступает на первый вход усилителя переменного напряжения (У) 14 датчика положения (ДП) 1, где происходит его усиление и преобразование до необходимого значения амплитуды, требуемой для питания статорных обмоток возбуждения (ВТ-С) 3 вращающегося трансформатора (ВТ) 2.
Выход с усилителя переменного напряжения (У) 14 электрически соединен с вращающимся трансформатором (ВТ) 2, обеспечивая тем самым питание обмоток статора (ВТ-С) 3.
Первый выход модуля аналого-цифрового преобразования (М-АЦП) 9 соединен с модулем вычисления угла шкалы грубого отсчета (ВУ-ГО) 15, а второй выход модуля аналого-цифрового преобразования (М-АЦП) 9 соединен с модулем вычисления угла шкалы точного отсчета (ВУ-ТО) 16, в свою очередь, выход модуля вычисления угла шкалы грубого отсчета (ВУ-ГО) 15 соединен с модулем вычисления угла датчика положения (ВУ-ДП) 17, а выход модуля вычисления угла шкалы точного отсчета (ВУ-ТО) 16 также соединен с модулем вычисления угла датчика положения (ВУ-ДП) 17 контроллера (К) 10.
Первый выход модуля вычисления угла датчика положения (ВУ-ДП) 17 соединен с формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 18, второй выход модуля вычисления угла датчика положения (ВУ-ДП) 17 соединен с формирователем сигналов последовательной шины канала типа RS422 (ФСПШ RS422) 19 контроллера (К) 10.
Первый выход постоянного запоминающего устройства (ПЗУ) 20 контроллера (К) 10 соединен с формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 18, второй выход постоянного запоминающего устройства (ПЗУ) 20 соединен с формирователем сигналов последовательной шины канала типа RS422 (ФСПШ RS422) 19, третий выход постоянного запоминающего устройства (ПЗУ) 20 соединен с модулем вычисления угла датчика положения (ВУ-ДП) 17 контроллера (К) 10, а четвертый выход постоянного запоминающего устройства (ПЗУ) 20 соединен с блоком компенсации неточности передачи угла (БК) 21.
Первый выход модуля базового адреса датчика положения (БА-ДП) 22 контроллера (К) 10 соединен с формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 18, второй выход модуля базового адреса датчика положения (БА-ДП) 21 соединен с формирователем сигналов последовательной шины канала типа RS422 (ФСПШ RS422) 19.
Модуль питания датчика положения (МП-ДП) 23 обеспечивает питание электрически связанных с ним контроллера (К) 10 и усилителя переменного напряжения (У) 14 датчика положения (ДП) 1, при этом выход модуля питания датчика положения (МП-ДП) 23 электрически соединен со вторым входом усилителя переменного напряжения (У) 14.
Формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN) 18 контроллера (К) 10 электрически соединен с первой последовательной шиной (ПШ1) 24 стабилизатора вооружения (СВ) 8, представляющей собой линию передачи сигналов последовательного протокола типа CAN, а формирователь сигналов последовательной шины канала типа RS422 (ФСПШ RS422) 19 контроллера (К) 10 электрически соединен с второй последовательной шиной (ПШ2) 25 системы управления стабилизатора вооружения (СУСВ) 26, представляющей собой линию передачи сигналов последовательного протокола типа RS422.
Первая последовательная шина (ПШ1) 24 электрически соединена с блоком управления (БУ) 27 стабилизатора вооружения (СВ) 8, а вторая последовательная шина (ПШ2) 25 электрически соединена с системой управления стабилизатора вооружения (СУСВ) 26, которая, в свою очередь, электрически связана с третьим выходом модуля базового адреса датчика положения (БА-ДП) 22 контроллера (К) 10 датчика положения (ДП) 1. Модуль базового адреса датчика положения (БА-ДП) 22 представляет собой устройство, позволяющее проводить однозначную идентификацию датчика положения (ДП) 1 в составе системы управления стабилизатора вооружения (СУСВ) 26 с привязкой его к вооружению, с которым он непосредственно (механически) связан.
Блок управления (БУ) 27 стабилизатора вооружения (СВ) 8 электрически соединен с бортовой сетью +27 В ОВН и обеспечивает питание цепи +27 В модуля питания датчика положения (МП-ДП) 23 датчика положения (ДП) 1.
Большинство новых элементов заявляемого СВ с датчиком положения реализованы как часть программного обеспечения контроллера блока управления СВ и контроллера датчика положения, при этом обработка получаемых и передаваемых данных осуществляется модулями контроллера, такими как модули аналого-цифрового преобразования и цифроаналогового преобразования, модуль вычисления угла датчика положения и модулей формирователей сигналов последовательной шины типа CAN, RS422.
Выходной каскад усилителя переменного напряжения датчика положения может быть выполнен по мостовой схеме, построенной на транзисторных сборках, управляемых в линейном режиме формируемым цифроаналоговым преобразователем контроллера.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер.с англ.- М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп.- М.: Мир, 1993).
(См. книгу Войтицкий С.А., Войтицкая Г.Н. Аналого-цифровой преобразователь сигналов синусно-косинусного вращающегося трансформатора в опорно-поворотном устройстве малогабаритной РЛС наземного базирования // Вестник Тульского государственного университета. Сер. Системы управления. 2010. Вып. 1).
(См. Оппенгейм Α., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с).
Таким образом, заявляемый в качестве изобретения СВ с цифровым датчиком положения системы управления и стабилизации вооружения позволяет:
- исключить необходимость использования в составе СВ для работы датчика положения (ДП) дополнительного источника питания переменного напряжения 27 В 400 Гц за счет:
- применения автономного встроенного в корпус датчика положения (ДП) вторичного модуля питания датчика положения (МП-ДП), использующего только штатное входное постоянное напряжение +27 В бортовой сети ОВН, что обеспечивает питание им необходимыми уровнями постоянного напряжения схем усилителя переменного напряжения (У) и контроллера (К), программно-аппаратные средства которого позволяют реализовать программный цифровой генератор синуса (ГС), выход которого представляет собой кодовое число, изменяющееся по синусоидальному закону, частота которого прямо пропорциональна частоте тактового генератора (ТГ), необходимого для синхронизации работы всех программно-аппаратных средств контроллера (К);
- наличия в составе контроллера (К) датчика положения (ДП) модуля цифроаналогового преобразователя (ЦАП), обеспечивающего на аппаратном уровне преобразование значений кодового числа от цифрового генератора синуса (ГС) в выходной слаботочный аналоговый сигнал, подаваемый на вход усилителя переменного напряжения (У), обеспечивающего, в свою очередь, питание статорных обмоток возбуждения вращающегося трансформатора (ВТ) усиленным по току и амплитуде требуемым переменным напряжением;
-повысить помехозащищенность сигнала формируемого ВТ датчика положения (ДП) в составе СВ за счет:
- местной обработки внутри корпуса ДП слаботочных аналоговых сигналов, идущих от обмоток шкалы грубого отсчета и точного отсчета статора ВТ ДП;
- сокращения до минимума длины (определяется длиной проводов, идущих от обмоток шкалы грубого отсчета и точного отсчета статора ВТ ДП до платы с М-АЦП контролера) сигнальных цепей шкалы ВУ-ГО и ВУ-ТО статора ВТ ДП и использования конструктивных методов их правильного экранирования и аппаратной фильтрации при соединении с входами схемы М-АЦП контроллера (К);
- программных фильтров, реализованных в контроллере (К) методом билинейного преобразования аналоговых прототипов, позволяющих выделить основную несущую частоту изменения входного сигнала и отсечь шумы (белый-шум);
- передачи полученного в результате аналого-цифровой обработки значения числового кода углового положения вала ДП с использованием последовательных цифровых шин передачи данных типа CAN и RS422, которые, в свою очередь, менее подвержены внешним электромагнитным воздействиям при передаче на заданные расстояния, чем передача слаботочных аналоговых сигналов;
- повысить точность измерения углового положения датчиком положения (ДП) в составе СВ за счет:
- использования нового многополюсного двухотсчетного вращающегося трансформатора (ВТ) повышенной точности с синусными и косинусными обмотками шкалы грубого и точного отсчета;
- применения заложенного в программе контроллера (К) уникального алгоритма цифровой обработки аналоговых сигналов обмоток шкалы грубого отсчета и точного отсчета статора ВТ ДП, позволяющего получить на цифровых выходах ДП дискретность младшего значащего разряда, соответствующую 2,5 угловым секундам;
-повысить надежность работы СВ с датчиком положения (ДП) за счет:
- применения бесконтактного вращающегося трансформатора (ВТ), выполненного по электрической схеме типа редуктосин, конструкция которого исключает использование контактных колец для обеспечения токосъема с роторных обмоток вращающегося трансформатора (ВТ);
- ввести современные информационные каналы обмена и передачи данных типа CAN и RS422 в датчик положения (ДП), обеспечивающих обмен информацией как с СВ, так и с внешними устройствами ОВН. Это обеспечивается за счет построения структуры СВ с датчиком положения (ДП) на современной цифровой элементной базе, имеющей в своем составе весь необходимый набор цифровых периферийных устройств и программных драйверов;
- повысить эксплуатационную интероперабельность СВ с датчиком положения (ДП) за счет:
- введения высокоскоростных цифровых информационных каналов обмена данных типа CAN и RS422 с внешними устройствами ОВН, что в свою очередь позволяет повысить функциональные и эксплуатационные характеристики СВ СУСВ с примененным датчиком, а также дает возможность установки СВ с датчиком положения (ДП) на другие ОВН без существенной их доработки и в сжатые сроки;
- введения во внутреннюю структуру СВ с датчиком положения (ДП) цифровых информационных каналов обмена типа CAN и RS422, позволяющих проводить настройку и диагностику датчика положения (ДП) в составе СВ при помощи встроенных средств, а также при наличии более одного ДП в составе СВ СУСВ автоматически устанавливать из СВ адрес каждого датчика положения (ДП) с привязкой его к вооружению, с которым он непосредственно (механически) связан;
- записи в ПЗУ ДП его собственной служебной информации (наименование датчика, адрес, версия программного обеспечения, заводской номер, коды ошибок и т.д.), что позволяет по запросу от СВ и СУСВ выдавать указанную информацию о датчике(ах) на видеосмотровое(ые) устройство(а) оператора(ов);
- возможности изменения программной версии контроллера (К) ДП без вскрытия его корпуса, что обеспечивается за счет программно-аппаратных средств, подключаемых к его внешнему разъему. Это позволяет оперативно обслуживать СВ в составе СУСВ без демонтажа и разборки ДП, что в ряде случаев позволяет сохранить гарантийные обязательства изготовителя;
- исключить редуктор для механической выставки нулевого положения датчика положения (ДП) в составе СВ при установке датчика положения (ДП) на ОВН за счет возможности установки нулевого положения датчика программным способом, либо используя последовательный канал из блока управления (БУ) стабилизатора вооружения (СВ) (при его настройке собственными технологическими средствами), либо через последовательный канал системы управления вооружением (СУСВ), имеющей встроенные средства настройки СВ.
Таким образом, поставленные в заявке технические задачи достигнуты.
Приведенные в описании технические преимущества, целесообразность и надежность стабилизатора вооружения боевого модуля, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытного образца СУСВ на испытательной базе ОАО «СКБ ПА» и ОАО«КЭМЗ» г. Ковров, ОАО «УКБТМ» и ОАО «НПК Уралвагонзавод» г. Нижний Тагил, а также ОАО «КБП» г. Тула.
Стабилизатор вооружения боевого модуля системы управления и стабилизации установленного вооружения, содержащий блок управления, привод ГН, привод ВН с датчиком положения, включающий в себя вращающийся трансформатор, состоящий из статора, механически соединенного с корпусом вращающегося трансформатора, и ротора, соединенного со статором, и муфту, механически соединенную с ротором вращающегося трансформатора и установленным вооружением боевого модуля, отличающийся тем, что в него дополнительно введены первая последовательная шина, электрически соединенная с блоком управления, вторая последовательная шина, электрически соединенная с системой управления и стабилизации вооружения, в датчик положения дополнительно введены модуль питания, усилитель переменного напряжения, контроллер, включающий в себя модуль аналого-цифрового преобразования, тактовый генератор, цифро-налоговый преобразователь, генератор синуса, модуль вычисления угла шкалы грубого отсчета, модуль вычисления угла шкалы точного отсчета, модуль вычисления угла датчика положения, модуль базового адреса датчика положения, постоянное запоминающее устройство, блок компенсации неточности передачи угла, формирователь сигналов первой последовательной шины, формирователь сигналов второй последовательной шины; причем вращающийся трансформатор реализован на базе бесконтактного многополюсного двухотсчетного индукционного редуктосина с синусными и косинусными обмотками грубого и точного отсчета, при этом статор вращающегося трансформатора датчика положения электрически соединен с модулем аналого-цифрового преобразования контроллера, тактовый генератор контроллера соединен с модулем аналого-цифрового преобразования, модулем цифроаналогового преобразователя и модулем генератора синуса, который, в свою очередь, соединен с модулем цифроаналогового преобразователя, а выход модуля цифроаналогового преобразователя контроллера электрически соединен с первым входом усилителя переменного напряжения датчика положения, при этом выход усилителя переменного напряжения электрически соединен со статором вращающегося трансформатора, первый выход модуля аналого-цифрового преобразования соединен с модулем вычисления угла шкалы грубого отсчета, а второй его выход соединен с модулем вычисления угла шкалы точного отсчета, в свою очередь, выход модуля вычисления угла шкалы грубого отсчета соединен с модулем вычисления угла датчика положения, а выход модуля вычисления угла шкалы точного отсчета также соединен с модулем вычисления угла датчика положения, при этом первый выход модуля вычисления угла датчика положения соединен с формирователем сигналов первой последовательной шины, а второй его выход соединен с формирователем сигналов второй последовательной шины, в свою очередь, первый выход постоянного запоминающего устройства соединен с формирователем сигналов первой последовательной шины, второй его выход соединен с формирователем сигналов второй последовательной шины, третий его выход соединен с модулем вычисления угла датчика положения, а четвертый выход соединен с блоком компенсации неточности передачи угла, который связан с модулем вычисления угла датчика положения, при этом вход модуля базового адреса датчика положения электрически связан со стабилизатором вооружения, первый выход модуля базового адреса датчика положения соединен с формирователем сигналов первой последовательной шины, второй его выход соединен с формирователем сигналов второй последовательной шины, третий его выход соединен с системой управления и стабилизации вооружения, в свою очередь, модуль питания датчика положения электрически соединен с контроллером и вторым входом усилителя переменного напряжения датчика положения и выходом блока управления стабилизатора вооружения, при этом формирователь сигналов первой последовательной шины электрически соединен с первой последовательной шиной стабилизатора вооружения, а формирователь сигналов второй последовательной шины электрически соединен со второй последовательной шиной системы управления и стабилизации вооружения.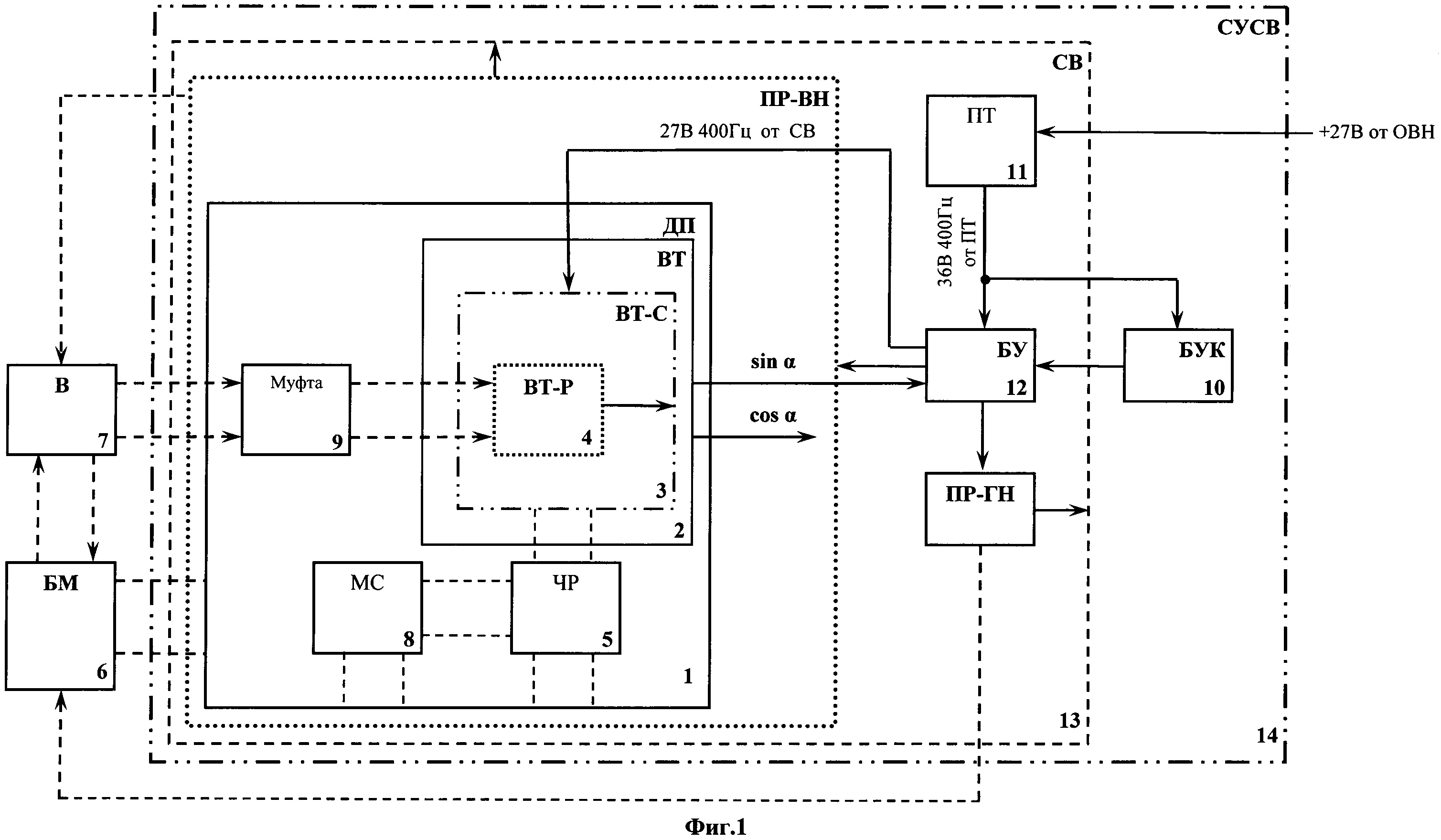
Телескопическая мачта
Подъемный механизм оружия башенной установки
Модульная электрическая машина
Система стабилизации и управления вооружением боевой машины
Стабилизатор танкового вооружения
Привод вертикального наведения и стабилизации
Привод горизонтального наведения и стабилизации
Поворотный механизм башни
Система управления и стабилизации вооружения боевого модуля
Система дистанционного управления вооружением
Телескопическая мачта
Подъемный механизм оружия башенной установки
Модульная электрическая машина
Система стабилизации и управления вооружением боевой машины
Стабилизатор танкового вооружения
Привод вертикального наведения и стабилизации
Привод горизонтального наведения и стабилизации
Поворотный механизм башни
Система управления и стабилизации вооружения боевого модуля
Система дистанционного управления вооружением

