Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С АДАПТИВНЫМ ФОРМИРОВАТЕЛЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ И СПОСОБ УЛЬТРАЗВУКОВОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С АДАПТИВНЫМ ФОРМИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройствам для получения информации о субъекте (пациенте). В частности, оно относится к устройству для получения информации о субъекте, которое принимает упругие волны и получает информацию о субъекте в виде данных изображения.
УРОВЕНЬ ТЕХНИКИ
Известно устройство, которое позволяет диагностировать рак молочной железы путем излучения ультразвука, то есть упругих волн, приема волн, отраженных внутренними участками органа пациента, и получения ультразвукового изображения отраженных сигналов. В патентной литературе 1 раскрыт способ, содержащий механическое сканирование зонда, имеющего элементы, которые осуществляют передачу ультразвука в одном измерении и образуют трехмерные данные изображения.
С другой стороны, адаптивная обработка сигналов была разработана, например, в области радиолокации. Условная (при наличии ограничений) минимизация мощности представляет собой один способ адаптивной обработки сигналов, которым минимизируется мощность сигнала, когда радиоволны принимаются множеством элементов, при фиксации чувствительности для одного направления. В соответствии с адаптивной обработкой сигналов параметр обработки адаптивно изменяют от одного направления к другому направлению. Способом адаптивной обработки сигналов этого вида можно успешно повышать пространственное разрешение, в частности разрешение в направлении ориентации. В непатентной литературе 1 раскрыто использование такого способа адаптивной обработки сигналов для образования данных изображения ультразвуковых отраженных сигналов с более высоким разрешением.
Для примера будет описана обработка на основе условной (при наличии ограничений) минимизации мощности, применимая для адаптивной обработки ультразвукового принимаемого сигнала. Прежде всего будет описана обработка, относящаяся к вычислению матрицы корреляции на основании принимаемого сигнала. Сначала преобразование Гилберта, то есть обработку задержек, соответствующих целевому местоположению, выполняют для принимаемых сигналов, выводимых со множества элементов. Тем самым получают принимаемый сигнал в комплексном представлении. Если s-тая выборка сигналов, получаемая при обработке сигнала, принимаемого с k-го элемента, равна xk[s], то входной вектор X[s] выборки s можно определить как:
[Выражение 1]
X[s]=[x1[s], x2[s], …, xM[s]]T,
где М - количество элементов.
Входной вектор X[s] используют для вычисления матрицы Rxx корреляции.
[Выражение 2]
 .
.
В правой части приведенного выражения Н обозначает комплексную сопряженную транспозицию, а  обозначает комплексно сопряженное число. Е[] представляет процесс вычисления среднего по времени и обозначает, что число выборок (в данном случае s) изменяют для вычисления среднего.
обозначает комплексно сопряженное число. Е[] представляет процесс вычисления среднего по времени и обозначает, что число выборок (в данном случае s) изменяют для вычисления среднего.
Далее, чтобы предотвратить влияние коррелированных мешающих волн, которые достигают зонда со всех мест за исключением целевого местоположения, способ пространственного среднего применяют к матрице Rxx корреляции, чтобы получить матрицу R'xx средней корреляции.
[Выражение 3]
 .
.
 обозначает подматрицу матрицы Rxx корреляции и перемещается по диагональным элементам Rxx.
обозначает подматрицу матрицы Rxx корреляции и перемещается по диагональным элементам Rxx.  имеет размер K×K с (n,n)-элементом Rxx в качестве первого диагонального элемента. Zn является коэффициентом при вычислении подматрицы и регулируется так, что полная сумма Zn может быть равна 1.
имеет размер K×K с (n,n)-элементом Rxx в качестве первого диагонального элемента. Zn является коэффициентом при вычислении подматрицы и регулируется так, что полная сумма Zn может быть равна 1.
В соответствии с условной (при наличии ограничений) минимизацией мощности получают вес для минимизации выходной мощности при соблюдении ограничивающего условия. Вес является весом, представляемым комплексным вектором. Когда чувствительность по отношению к ультразвуковому сигналу, принимаемому из целевого местоположения, ограничена 1, оптимальный вес Wopt для минимизации выходной мощности можно получать в соответствии с условной (при наличии ограничений) минимизацией мощности с помощью следующего выражения.
[Выражение 4]
 .
.
С является ограниченным вектором и изменяется в соответствии с положением элемента и положением исследуемого объекта. Однако при выполнении обработки задержек по принимаемым сигналам все значения С могут быть равны 1 при определенном размере (в этом случае K) матрицы средней корреляции. Мощность Pmin, вычисляемая с использованием веса Wopt, может быть получена как:
[Выражение 5]
 .
.
Таким образом, в соответствии с условной (при наличии ограничений) минимизацией мощности матрицу корреляции и даже матрицу средней корреляции получают на основании принимаемых сигналов. Обратную матрицу можно использовать для вычисления веса или мощности, когда используют вес. Вес или мощность, когда используют вес, представляет собой вес или мощность, когда чувствительность к ультразвуковому сигналу из целевого местоположения задают равным 1 для подавления ультразвуковых сигналов с других мест. Иначе говоря, условная (при наличии ограничений) минимизация мощности обеспечивает избирательное извлечение ультразвукового сигнала из целевого местоположения, результатом чего является более высокое пространственное разрешение. Заметим, что мощность можно вычислять с помощью операций QR-разложения и обратной подстановки вместо непосредственного вычисления обратной матрицы.
ПЕРЕЧЕНЬ ЦИТИРОВАННЫХ ИСТОЧНИКОВ
ПАТЕНТНАЯ ЛИТЕРАТУРА
Патентная литература 1: публикация заявки на патент Японии №2009-028366.
НЕПАТЕНТНАЯ ЛИТЕРАТУРА
Непатентная литература 1: Proc. Acoustics, Speech Signal Process., стр. 489-492 (Март 2005 г.).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Объем обработки может быть проблемой, когда адаптивную обработку сигналов используют для конфигурации, в которой одномерный или двумерный матричный зонд применяют для образования трехмерных данных изображения с более высоким пространственным разрешением.
При адаптивной обработке сигналов могут требоваться вычисление обратной матрицы, выполнение QR-разложения, вычисление собственного значения или чего-либо подобного для матрицы, имеющей размер, соответствующий количеству принимаемых сигналов. Известно, что объем таких вычислений при обработке возрастает пропорционально кубу размера матрицы. Например, рассмотрим случай, когда одномерный матричный зонд, который принимает сигналы при наличии 64-элементной апертуры, перемещают в направлении, которое ортогонально к направлению матрицы, для получения сигналов для 32 срезов и последующего выполнения адаптивной обработки сигналов. Этот случай эквивалентен случаю, когда сигналы 64×32=2048 каналов получают и в то же время обрабатывают в двух измерениях. Большой объем обработки может требоваться для адаптивной обработки сигналов при использовании (2048 каналов) входных сигналов (принимаемых сигналов) и время обработки и/или размер схемы обработки могут возрастать.
Настоящее изобретение было выполнено с учетом упомянутых выше проблем, и настоящим изобретением снижается рабочая нагрузка при адаптивной обработке сигналов, когда адаптивную обработку сигналов применяют для получения данных изображения, имеющих высокое пространственное разрешение.
Устройство для получения информации о субъекте согласно настоящему изобретению включает в себя зонд, который имеет множество элементов, расположенных в матрице, которые принимают упругие волны, распространяющиеся в субъекте, и преобразуют принимаемые упругие волны в принимаемые сигналы, первый блок обработки сигналов, который использует принимаемые сигналы, выводимые элементами, для вычисления первого выходного сигнала в качестве сигнала, соответствующего упругим волнам из целевого местоположения, второй блок обработки сигналов, который использует первый выходной сигнал для целевого местоположения для вычисления второго выходного сигнала в качестве сигнала, соответствующего упругим волнам из целевого местоположения, и блок обработки изображения, который использует второй выходной сигнал для формирования данных изображения для отображения. В этом случае по меньшей мере один из первого блока обработки сигналов и второго блока обработки сигналов использует адаптивную обработку сигналов для вычисления первого выходного сигнала или второго выходного сигнала.
В способе получения информации о субъекте согласно настоящему изобретению принимают упругие волны, распространяющиеся в субъекте, множеством элементов, преобразуют принимаемые упругие волны в принимаемые сигналы и используют принимаемые сигналы для образования данных изображения, и способ включает в себя первый этап обработки сигналов, на котором используют принимаемые сигналы, выводимые элементами, для вычисления первого выходного сигнала в качестве сигнала, соответствующего упругим волнам из целевого местоположения, второй этап обработки сигналов, на котором используют первый выходной сигнал для целевого местоположения для вычисления второго выходного сигнала в качестве сигнала, соответствующего упругим волнам из целевого местоположения, и этап обработки изображения, на котором используют второй выходной сигнал для формирования данных изображения для отображения, при этом по меньшей мере на одном из первого этапа обработки сигналов и второго этапа обработки сигналов используют адаптивную обработку сигналов для вычисления первого выходного сигнала или второго выходного сигнала.
Согласно настоящему изобретению рабочую нагрузку при адаптивной обработке сигналов можно снизить при применении адаптивной обработки сигналов для получения данных изображения, имеющих высокое пространственное разрешение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
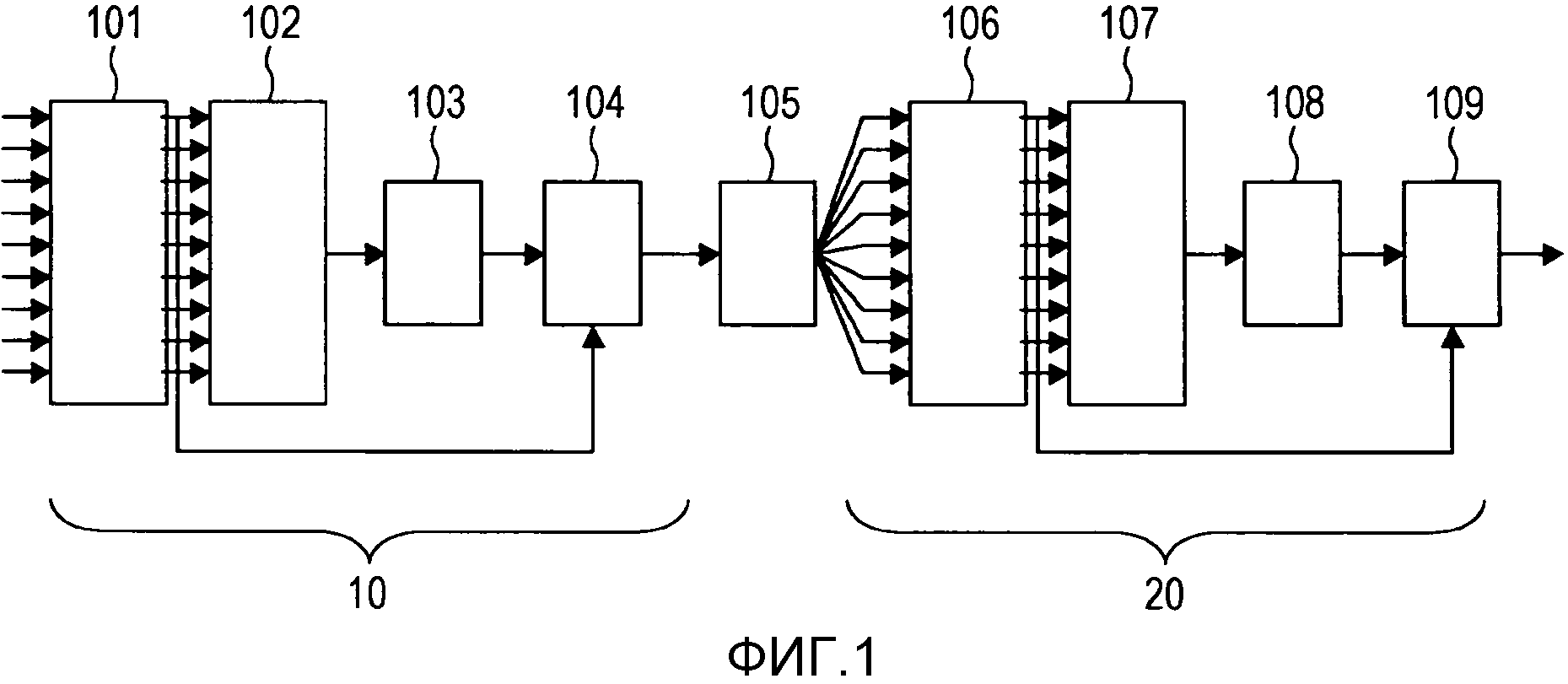
фиг. 1 - структурная схема, иллюстрирующая основные принципы обработки сигналов согласно настоящему изобретению;
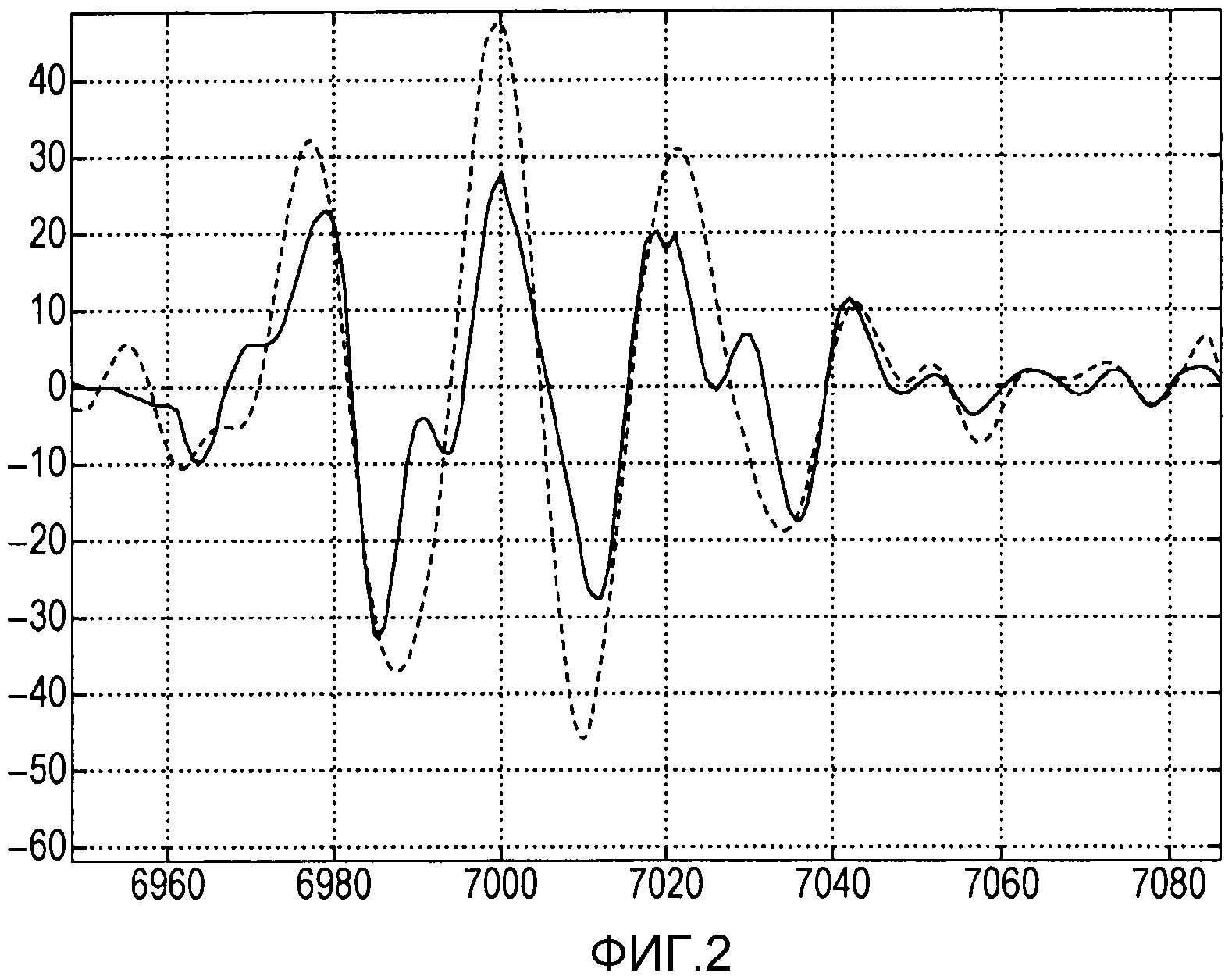
фиг. 2 - график, иллюстрирующий кривую сигнала, обработанного в соответствии с адаптивной обработкой сигналов, после задержки и суммирования;
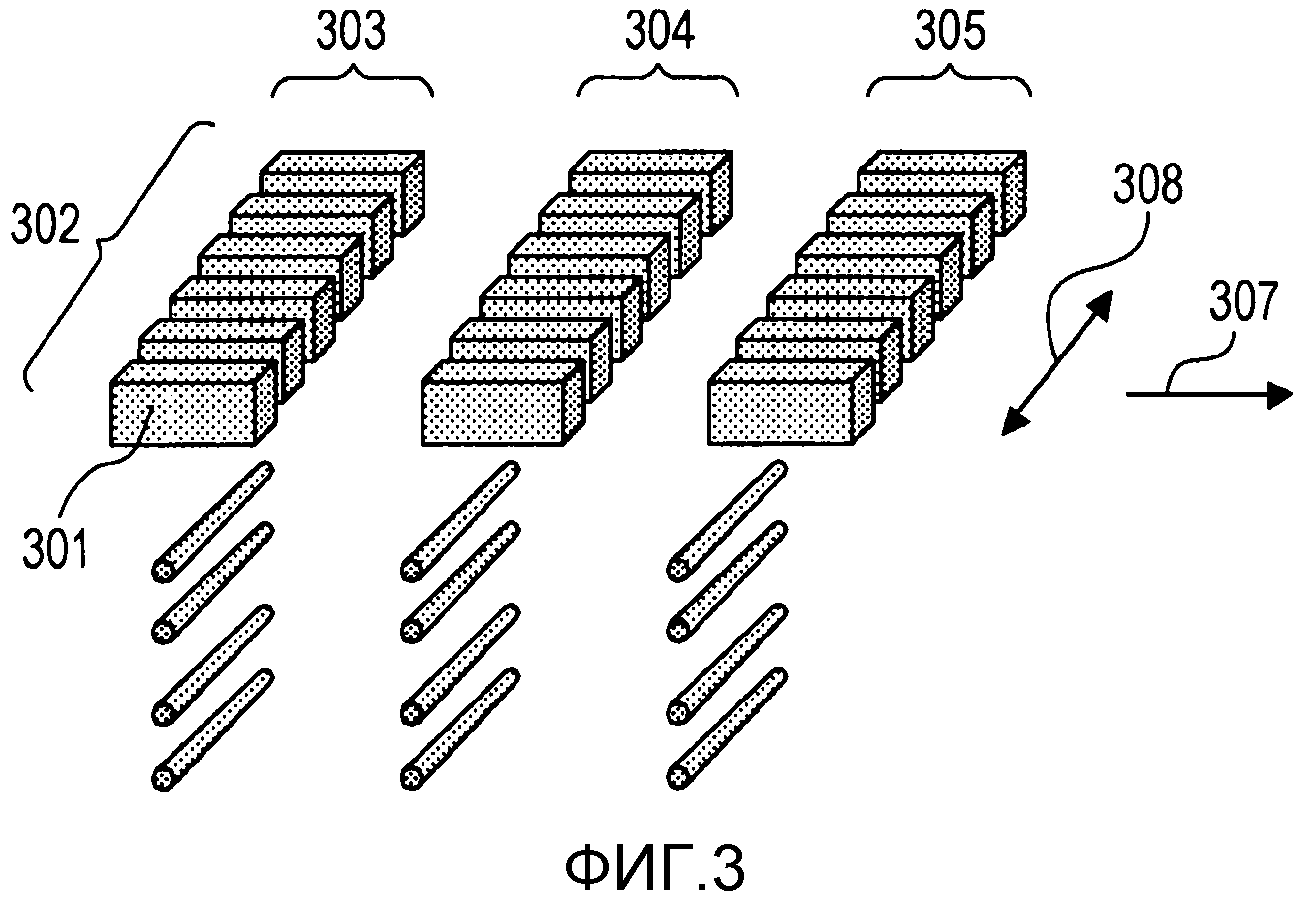
фиг. 3 - концептуальное схематичное представление механического сканирования зонда;
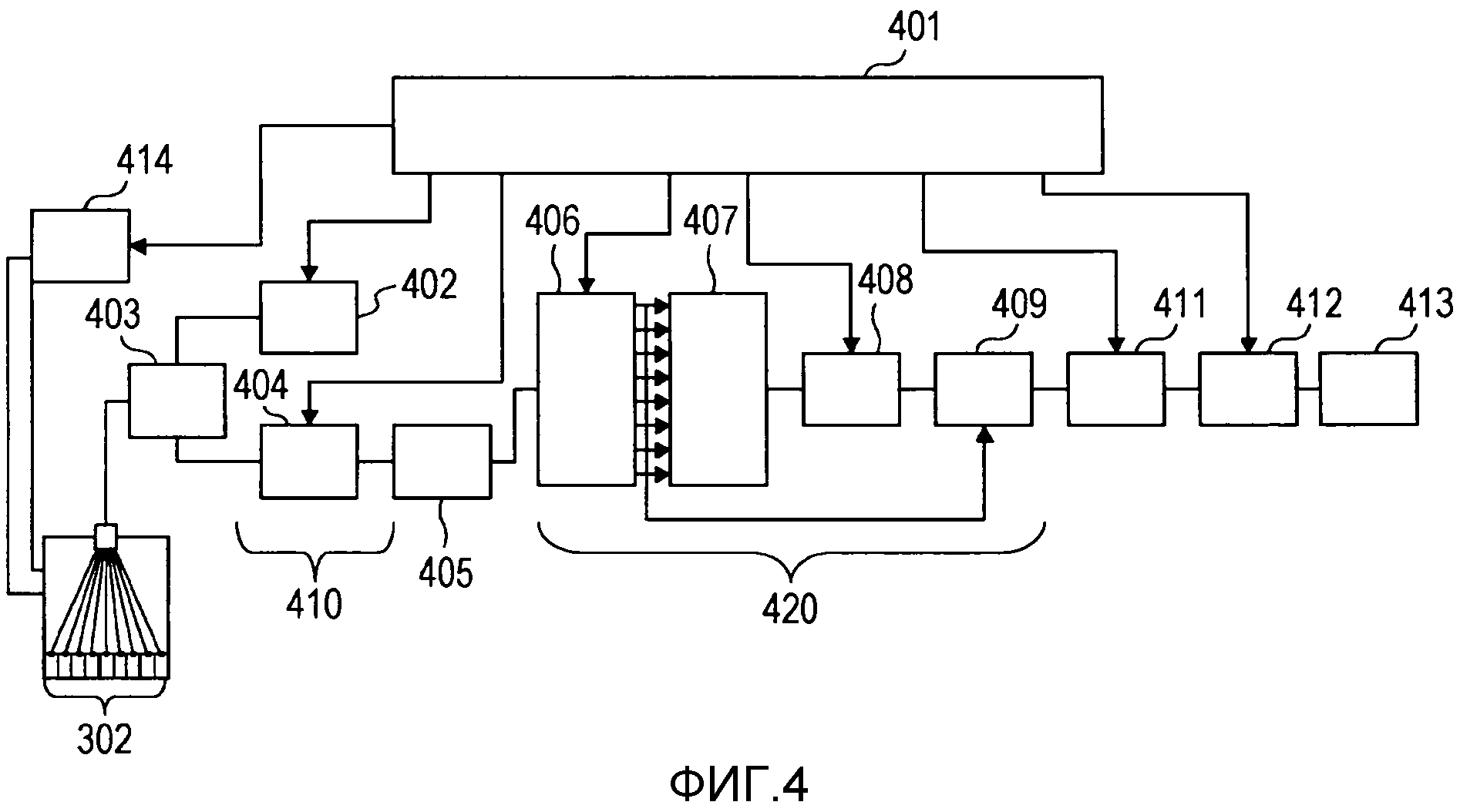
фиг. 4 - структурная схема для описания первого варианта выполнения;
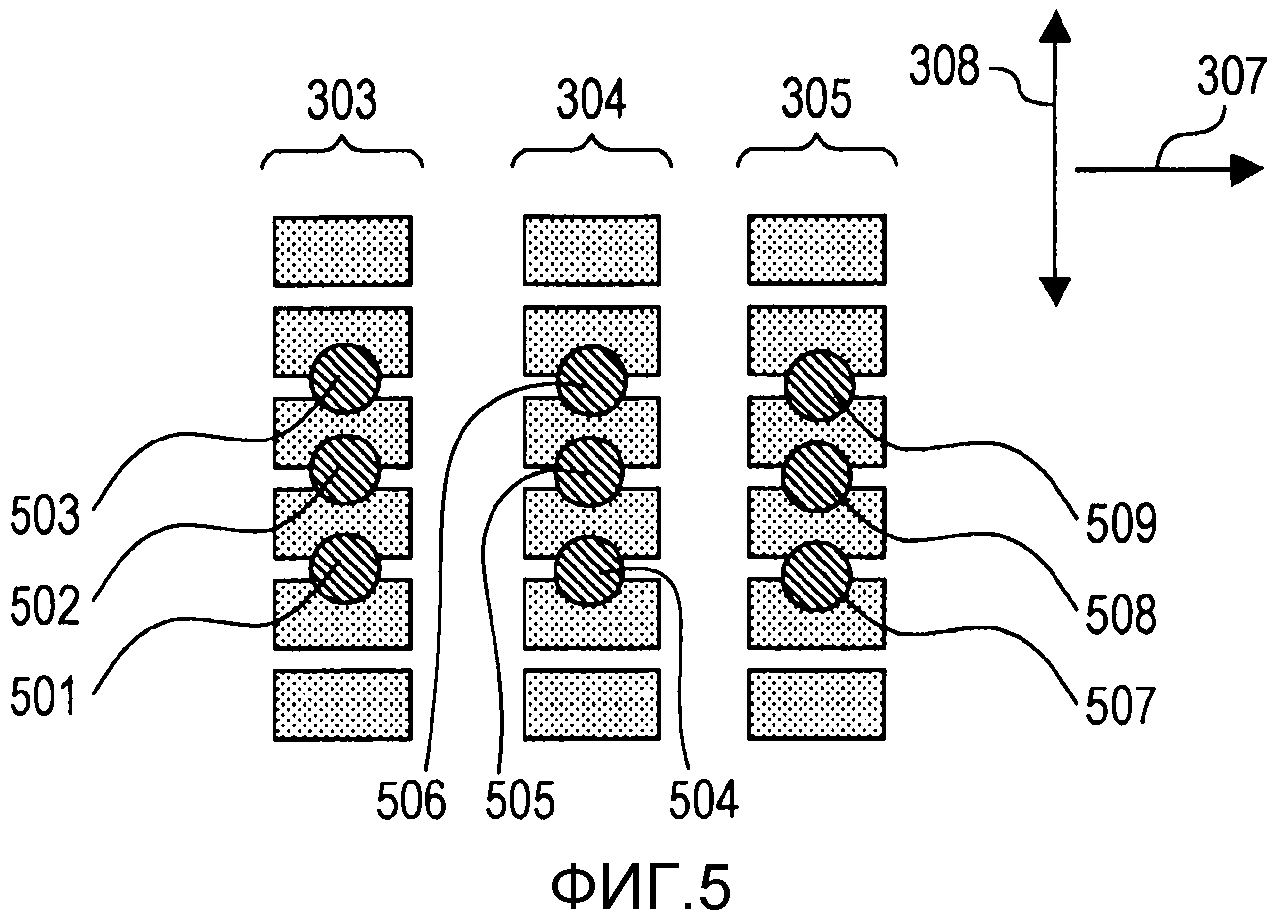
фиг. 5 - схематичное представление, иллюстрирующее зависимость между положениями зонда и положениями при получении сигналов линейного сканирования;
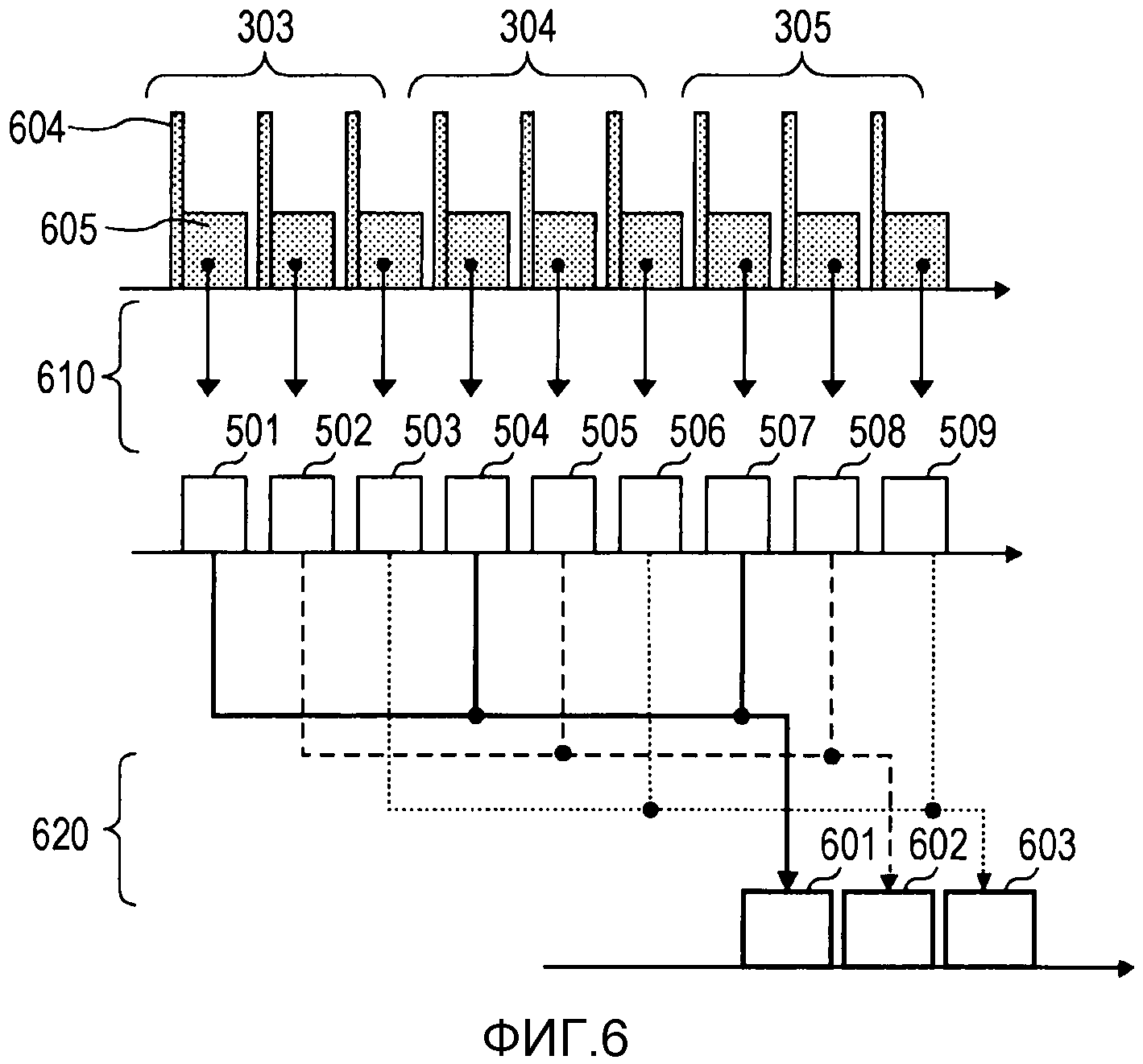
фиг. 6 - схематичное представление, иллюстрирующее временные соотношения при получении сигналов линий сканирования и временные соотношения при работе второго блока обработки сигналов;
фиг. 7А - результат моделирования изображения;
фиг. 7В - результат моделирования изображения;
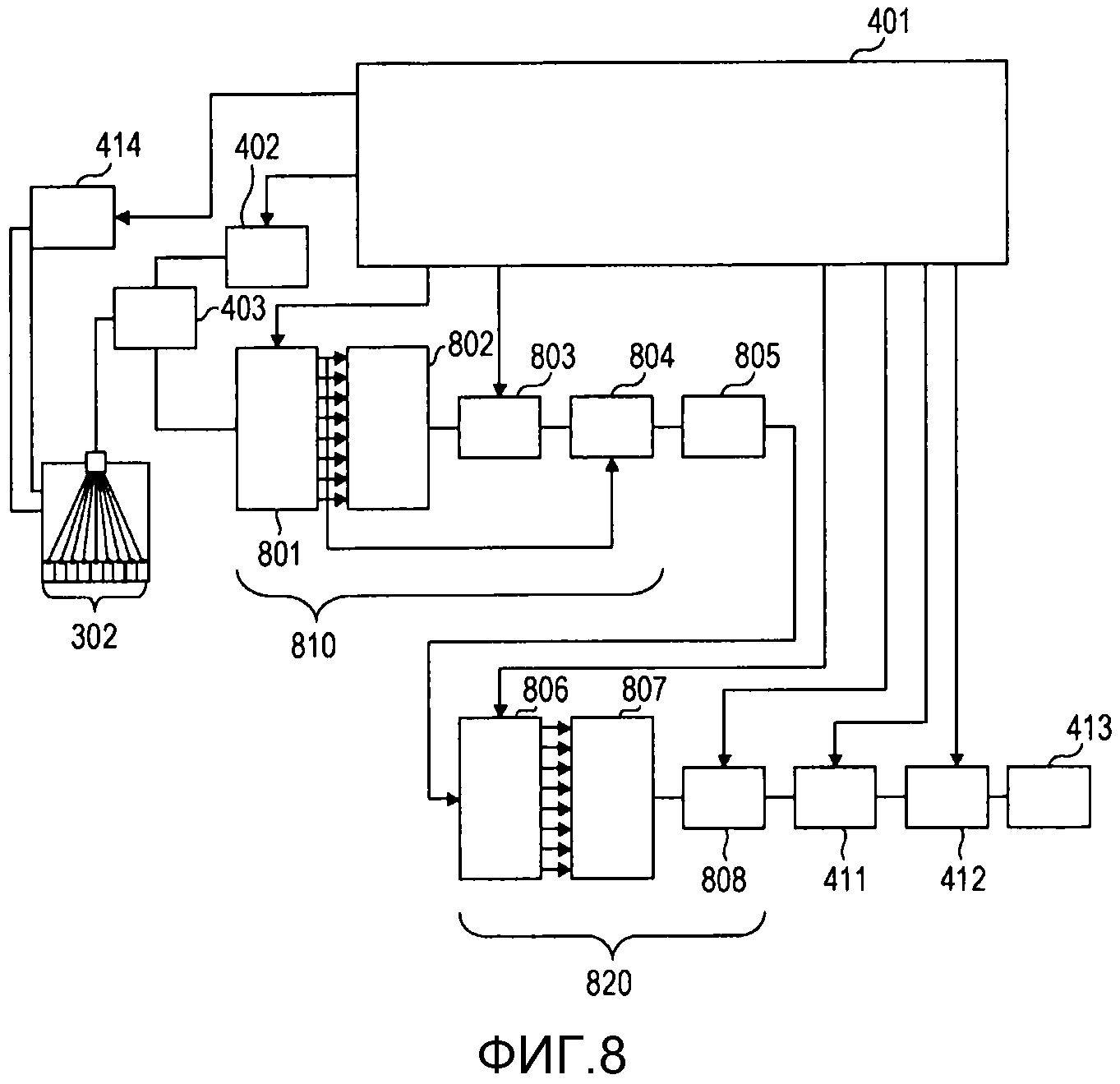
фиг. 8 - структурная схема, иллюстрирующая второй вариант выполнения;
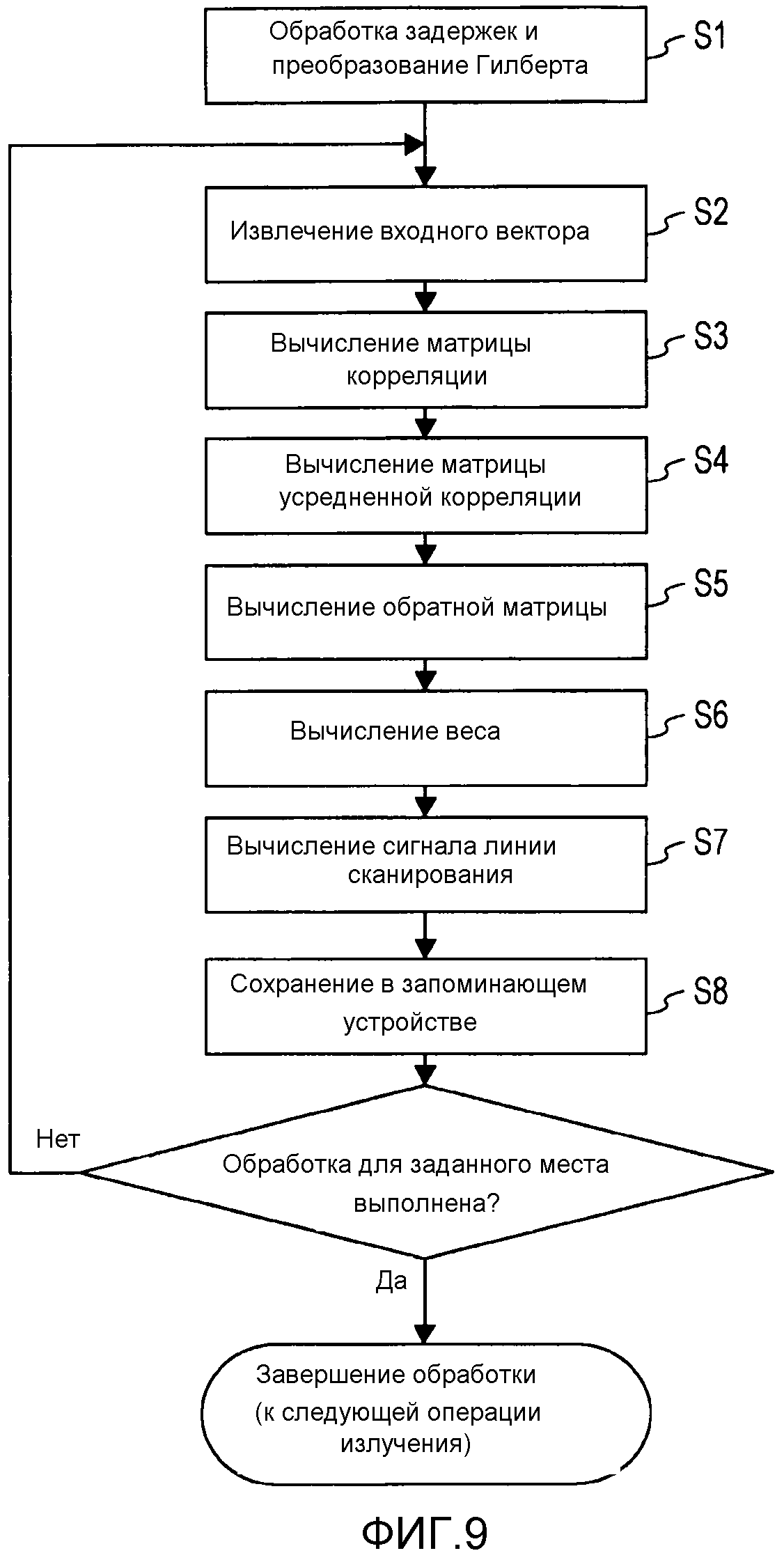
фиг. 9 - блок-схема последовательности действий, иллюстрирующая обработку первым блоком обработки сигналов; и
фиг. 10 - блок-схема последовательности действий, иллюстрирующая обработку вторым блоком обработки сигналов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению упругие волны включают в себя волны, называемые звуковыми волнами, ультразвуком, акустическими волнами и фотоакустическими волнами. Упругие волны распространяются в субъекте и принимаются зондом. Иначе говоря, устройство для получения информации о субъекте согласно настоящему изобретению включает в себя устройство с использованием технологии ультразвуковых эхо-сигналов, которое излучает ультразвук к субъекту, принимает отраженные волны (отраженный ультразвук) от внутренностей субъекта и получает информацию о субъекте (пациенте) в виде данных изображения, и устройство с использованием фотоакустического эффекта, которое излучает свет (электромагнитные волны) к пациенту, принимает акустические волны (обычно ультразвук), возникающие внутри субъекте (пациента), и получает информацию о субъекте в виде данных изображения. В первом устройстве с использованием технологии ультразвуковых эхо-сигналов получаемая информация о субъекте представляет собой информацию, отражающую различия акустического импеданса между тканями внутри субъекта. Во втором устройстве с использованием фотоакустического эффекта получаемая информация о субъекте представляет собой информацию о распределении источников акустических волн, формируемых при облучении светом, начальном распределении давлений внутри субъекта, распределении плотности поглощения световой энергии, извлекаемом из начального распределения давлений, распределении коэффициентов поглощения или распределении концентраций вещества, включенного в ткань. Распределение концентраций вещества может быть, например, распределением насыщения кислородом или распределением концентраций оксигенирированного/восстановленного гемоглобина.
Перед описанием основных принципов построения блока обработки сигналов согласно настоящему изобретению и обоснованием работы способа обработки сначала будет сделана оценка объема обработки для случая, когда все принимаемые в двух измерениях входные сигналы обрабатываются адаптивным способом обработки сигналов. Нижеследующее описание основано на примере, в котором зондом, имеющим одномерную матрицу из множества элементов (в дальнейшем также называемым «одномерным матричным зондом»), механически сканируют в направлении, ортогональном к направлению матрицы, для получения принимаемых сигналов в двух измерениях. Однако настоящее изобретение также применимо при использовании зонда, имеющего двумерную матрицу из множества элементов (в дальнейшем также называемого «двумерным матричным зондом»). В описании настоящего изобретения направление, в котором механически сканирует зонд, называется направлением механического сканирования. Направление, ортогональное к направлению матрицы зонда, называется угломестным направлением. Например, в нижеследующем описании зонд сканирует в угломестном направлении.
Когда количество входов элементов в направлении матрицы равно NL, количество входов в угломестном направлении равно NE, общее количество входных сигналов X, которые представляют собой принимаемые сигналы, составляет NL×NE=Ntotal. Матрица Rxx корреляции, вычисляемая на основании X, представляет собой матрицу, имеющую размер Ntotal×Ntotal. Когда способ пространственного среднего применяют для подавления влияния, оказываемого корреляционной мешающей волной, и количество пространственных средних составляет половину Ntotal, матрица R'xx средней корреляции имеет размер (Ntotal/2)×(Ntotal/2). Используя обратную матрицу, вычисляемую на основании матрицы средней корреляции, вычисляют соответствующий вес или мощность при использовании веса. При адаптивной обработке сигналов этап вычисления обратной матрицы занимает большую часть рабочей нагрузки. Рабочая нагрузка этапа вычисления обратной матрицы пропорциональна кубу размера (Ntotal/2) матрицы.
Например, при адаптивной обработке сигналов с использованием некоторого количества (NL) входов в направлении матрицы для сигналов, принимаемых 64 элементами, и некоторого количества (NE) входов в угломестном направлении для сигналов, принимаемых для 32 срезов, количество (Ntotal) входных каналов равно 2048 каналам. Размер матрицы, используемой для вычисления обратной матрицы, равен 1024×1024, что приводит к большому объему обработки и повышению размера схемы.
ОСНОВНЫЕ ПРИНЦИПЫ ОБРАБОТКИ СИГНАЛОВ
Далее с обращением к фиг. 1 и фиг. 9 будут описаны основные принципы обработки сигналов согласно настоящему изобретению. Для примера предполагается, что в первом блоке вычисления сигналов и втором блоке вычисления сигналов применяется адаптивная обработка сигналов. Однако согласно настоящему изобретению, для получения результата, заключающегося в более высоком пространственном разрешении, может требоваться применение адаптивной обработки сигналов по меньшей мере в одном из первого блока вычисления сигналов и второго блока вычисления сигналов. В одном из первого блока вычисления сигналов и второго блока вычисления сигналов можно использовать адаптивную обработку сигналов.
Для измерения ультразвукового эхо-сигнала излучают ультразвук к субъекту, а отраженные волны принимают расположенными в одном измерении элементами. Каждый из элементов преобразует волны в принимаемый сигнал и выводит его на первый блок вычисления сигналов. Ниже будет описана первая стадия обработки, выполняемая относительно принимаемого сигнала первым блоком 10 вычисления сигналов. Согласно настоящему изобретению сигнал, соответствующий упругим волнам из целевого местоположения, который вычисляется первым блоком вычисления сигналов, будет называться первым выходным сигналом.
ПЕРВЫЙ БЛОК ВЫЧИСЛЕНИЯ СИГНАЛОВ
Схема 101 обработки задержек выполняет обработку задержек в соответствии с целевым местоположением на основании сигнала, получаемого с элемента зонда (количество входов составляет NL), и преобразует получаемый сигнал в комплексный сигнал с помощью преобразования Гилберта. Комплексный сигнал выводится (этап S1) в качестве входного вектора X[s] s-ой выборки.
Затем схема 102 вычисления матрицы усредненной корреляции извлекает (этап S2) сигналы для среднего по времени числа (такого как 10 выборок) из входных векторов, обновляемых на заданных временных интервалах, и вычисляет (этап S3) матрицу Rxx корреляции извлеченных сигналов. Матрицы частичной корреляции усредняются (этап S4) для получения и вывода матрицы R'xx средней корреляции. Если размер матрицы R'xx средней корреляции составляет половину размера матрицы Rxx корреляции, то размер выходной матрицы R'xx средней корреляции равен (NL/2)×(NL/2). Схема 103 вычисления веса получает (этап S5) матрицу, обратную к входной матрице R'xx средней корреляции, и выводит (этап S6) вес Wopt.
В схеме 104 вычисления первого выходного сигнала используются входной вес Wopt и входной вектор, используемый для вычисления матрицы корреляции, для вычисления (этап S7) сигнала y[s] линии сканирования s-ой выборки в качестве первого выходного сигнала. Сигнал y[s] линии сканирования s-ой выборки представляет собой сигнал, соответствующий ультразвуку (отраженной волне) из одной точки (целевого местоположения) на линии излучаемого ультразвука (линии сканирования). Сигнал y[s] линии сканирования сохраняется (этап S8) в запоминающем устройстве 105.
Обработка от этапа S2 до этапа S8 повторяется при изменении положения исследуемого объекта вдоль направления излучения ультразвука (направления линии сканирования) и извлекаемых входных векторов. Обычно входные векторы извлекаются в самое последнее время приема. Иначе говоря, за вычислением сигнала y[s] линии сканирования s-ой выборки следует вычисление сигнала y[s+1] линии сканирования (s+1)-ой выборки. Повторением этой обработки для некоторого количества положений исследуемого объекта в направлении линии сканирования обеспечивается сигнал линии сканирования.
После окончания обработки на основании положений исследуемого объекта в заданных пределах измерения (таких как пределы в направлении глубины исследуемого объекта) обработка от этапа S1 до этапа S8 выполняется для принимаемого сигнала отраженных волн, принимаемых в соответствии со следующим излучением (таким как излучение соседними 64 элементами при линейном сканировании).
Поскольку входной вектор X[s] и вес Wopt имеют разное количество сигналов в соответствии с сигналами, используемыми для пространственного среднего, сигнал X'[s], например, из нижеследующего выражения, получающийся в результате извлечения NL/2 элементов в центре входного вектора X[s], используется для вычисления. Однако сигнал, имеющий NL/2 элементов, следует из скользящего среднего входного вектора X[s].
[Выражение 6]
 .
.
Вес относится к весу, представленному в комплексном векторе. Кроме того, X'[s] является сигналом в комплексном представлении. Получение внутреннего произведения его путем адаптивной обработки сигналов означает суммирование принимаемых сигналов из каналов (или принимаемых сигналов, выводимых от элементов) после изменения (регулирования) фаз в соответствии с положениями исследуемого объекта. Иначе говоря, когда вес изменяется при перемещении целевого местоположения, величина изменения фазы относительно принимаемых сигналов из каналов также изменяется.
На фиг. 2 представлен график, иллюстрирующий кривую сигнала (первого выходного сигнала), вычисленную при выполнении адаптивной обработки сигналов относительно одного принимаемого сигнала, и кривую сигнала, вычисленную путем обычной задержки и суммирования. На фиг. 2 сплошной линией показана кривая сигнала, подвергнутого адаптивной обработке сигналов, а пунктирной линией показана кривая сигнала после задержки и суммирования. По горизонтальной оси показан номер принимаемой выборки, а по вертикальной оси показано значение, которое является безразмерным и пропорциональным акустическому давлению. При адаптивной обработке сигнала согласно фиг. 2 вес пересчитывался и изменялся для каждых 10 выборок. Поэтому фазы сигналов представлены смещенными и дискретными на местах выборки 7000 и выборки 7010.
ВТОРОЙ БЛОК ВЫЧИСЛЕНИЯ СИГНАЛОВ
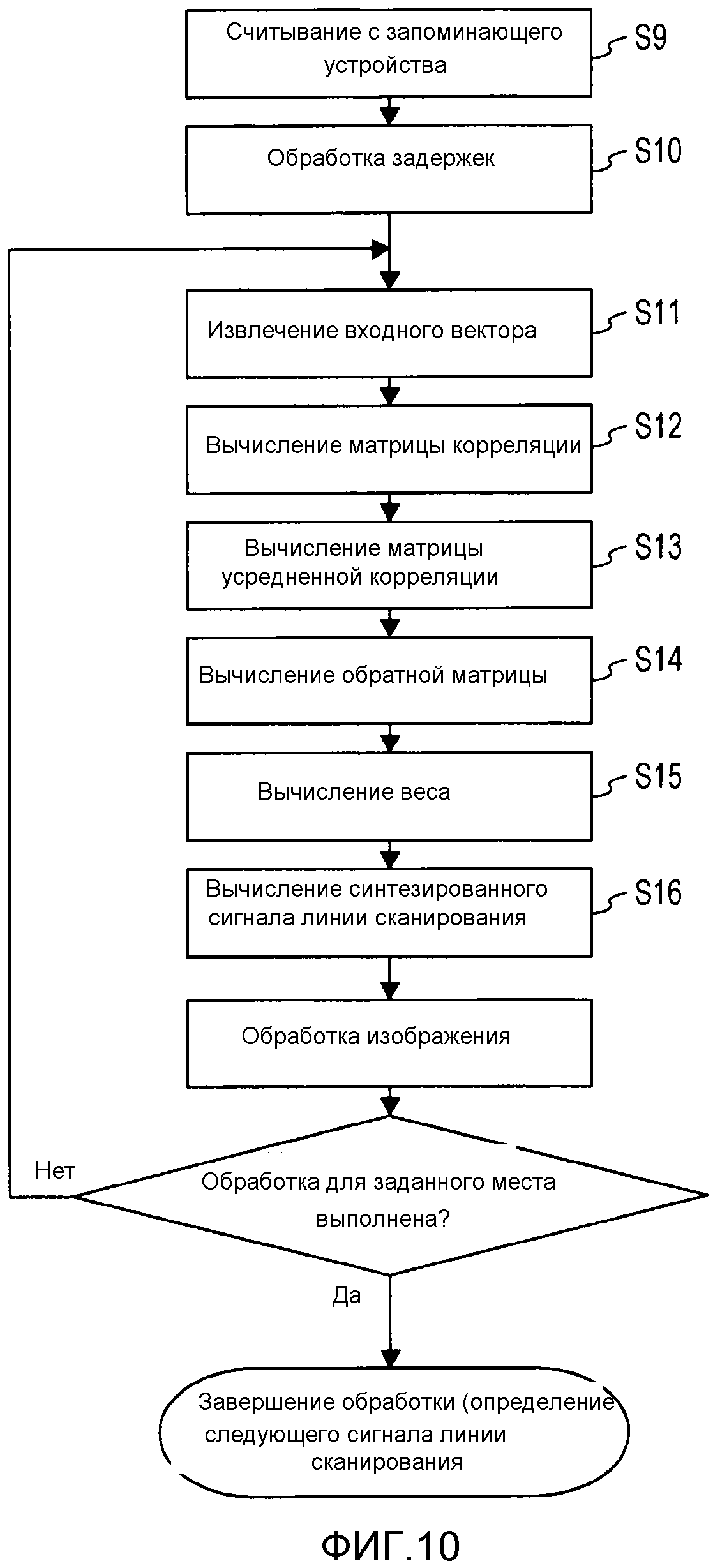
Далее с обращением к фиг. 1 и фиг. 10 будет описан второй блок 20 вычисления сигналов. Второй блок 20 вычисления сигналов выполняет вторую стадию обработки принимаемых сигналов, в том числе выполняет адаптивную обработку входных сигналов, которые представляют собой множество сигналов линий сканирования (первых выходных сигналов), вычисленных, например, для различных положений при сканировании зонда. Согласно настоящему изобретению сигнал, соответствующий упругим волнам из целевого местоположения, который вычисляется вторым блоком вычисления сигналов, называется вторым выходным сигналом.
Из запоминающего устройства 105 считывается (этап S9) множество сигналов линий сканирования по угломестному направлению зонда. Схема 106 обработки задержек выполняет обработку (этап S10) задержек в соответствии с положением исследуемого объекта по множеству сигналов линий сканирования (количество входов: NE) и выводит первый выходной сигнал, входной вектор X[s], вычисленный первым блоком вычисления сигналов. Если в первом блоке вычисления сигналов применяется адаптивная обработка сигналов, первый выходной сигнал уже представляет собой комплексный сигнал. При этом исключается необходимость выполнения еще одного преобразования Гилберта, и комплексный сигнал с прошедшими обработку задержками непосредственно выводится в качестве входного вектора X[s].
Далее схема 107 вычисления матрицы усредненной корреляции извлекает (этап S11) комплексные сигналы для среднего по времени числа на основании входных векторов, обновляемых на заданных интервалах времени, и вычисляет (этап S12) матрицу Rxx корреляции извлеченных сигналов.
Матрицы частичной корреляции усредняются для получения (этап S13) и вывода матрицы R'xx средней корреляции. Если размер матрицы R'xx средней корреляции составляет половину размера матрицы Rxx корреляции, то размер выходной матрицы R'xx средней корреляции равен (NE/2)×(NE/2). Схема 108 вычисления веса получает (этап S14) матрицу, обратную к входной матрице R'xx средней корреляции, и вычисляет (этап S15) и выводит вес Wopt.
В схеме 109 вычисления второго выходного сигнала используются входной вес Wopt и входной вектор, используемый для вычисления матрицы корреляции, для вычисления (этап S16) синтезированного сигнала y[s] линии сканирования в качестве второго выходного сигнала. После этого блок обработки изображения (не показанный на фиг.1) использует синтезированный сигнал линии сканирования для вычисления огибающей или выполнения логарифмического сжатия и образования результирующей информации о субъекте в виде отображаемых данных изображения.
На второй стадии обработки сигналов ультразвук не излучается, но сигнал линии сканирования (первый выходной сигнал), который выводится из блока обработки сигналов на первой стадии, используется при обработке. В этом случае величину задержки предпочтительно вычислять при обработке задержек на второй стадии в блоке обработки сигналов в предположении, что ультразвук излучался из местоположений зонда, для которых вычислялись сигналы линий сканирования, к месту нахождения исследуемого объекта, а отраженные волны принимались в местоположениях зонда. Однако в устройстве с использованием фотоакустического эффекта, то есть в устройстве, которое излучает свет или электромагнитные волны к субъекту и выполняет обработку получающихся в результате акустических волн (обычно ультразвуковых), расстояния между местоположениями зонда, для которых вычисляются сигналы линий сканирования, и целевым местоположением могут использоваться для вычисления величины задержки.
Обработка от этапа S11 до этапа S16 повторяется при изменении положения исследуемого объекта и изменении извлекаемых входных векторов. После окончания обработки для положений исследуемого объекта в заданных пределах измерения обработка от этапа S9 выполняется еще раз при изменении используемого сигнала линии сканирования.
ОБОСНОВАНИЕ РАБОТЫ СПОСОБА ОБРАБОТКИ, ИЗЛОЖЕННОГО ВЫШЕ
Кроме того, при выполнении адаптивной обработки сигналов на второй стадии, описанной выше, фазы сигналов линий сканирования, получаемых первым блоком 10 обработки сигналов, можно использовать при обработке. Для этого может потребоваться сохранение фаз сигналов, соответствующих ультразвуку из целевого местоположения, включенных в сигналы линий сканирования. Даже при выполнении на второй стадии простой обработки с синтезированной апертурой фазы сигналов линий сканирования также можно использовать при обработке, для чего может потребоваться сохранение фаз сигналов, соответствующих ультразвуку из целевого местоположения. Иначе говоря, исходя из показанного на фиг. 2, можно полагать, что обработка сигнала на второй стадии неэффективна при наличии сигнала линии сканирования, который имеет смещение фазы в соответствии с обновлением веса.
С обращением особого внимания на ограниченный вектор С при адаптивной обработке сигналов еще раз будет исследована фаза сигнала, соответствующего ультразвуку из целевого местоположения. Условная (при наличии ограничений) минимизация мощности представляет собой способ, предназначенный для получения веса, необходимого для минимизации выходной мощности при ограничивающем условии, или ограниченной выходной мощности. Ограничивающее условие обычно представляют следующим выражением.
[Выражение 7]
CTW∗=H.
В этом случае С представляет собой ограниченную матрицу (которая определяет, например, направление на исследуемый объект), W представляет собой вес, подлежащий получению, и Н определяет вектор отклика для ограниченной матрицы (например, в направлении на исследуемый объект). При ограничивающем условии обработка для получения W, которое удовлетворяет нижеследующему выражению, представляет собой условную (при наличии ограничений) минимизацию мощности.
[Выражение 8]
 .
.
Если в этом случае сосредоточить внимание на одном направлении или одном положении, вычисления можно выполнять в соответствии с определением, что отклик Н при ограничивающем условии равен 1 и С является не матрицей, а ограниченным вектором.
[Выражение 9]
CTW∗=1.
В приведенном выражении С является вектором в комплексном представлении. Вес W также является вектором в комплексном представлении. То, что внутреннее произведение векторов равно 1, то есть внутреннее произведение не включает в себя мнимую часть комплексного числа, гарантирует, что фаза не будет изменяться даже в случае, когда сигнал с направления или места, представленный ограниченный вектором, умножается на вес W.
То есть, когда принимаемые сигналы в комплексном представлении применительно к каналам умножаются на вес, представленный комплексным числом, фазы принимаемых сигналов в каналах изменяются. Затем они суммируются, при этом фаза сигнала, соответствующего ультразвуку из целевого местоположения, представленного ограниченным вектором, не изменяется. Это означает, что фаза ультразвукового сигнала с направления фокуса или целевого местоположения сохраняется.
Таким образом, хотя фаза сигнала линии сканирования не сохраняется на фиг. 2, фаза сигнала из целевого местоположения, которая действительно необходима, сохраняется. По этой причине в настоящем изобретении способ обработки, в соответствии с которым обработка выполняется с использованием фазы, работает во втором блоке обработки сигналов.
ОБЪЕМ ОБРАБОТКИ
Далее будет описан объем обработки для случая, когда в первом блоке обработки сигналов и втором блоке обработки сигналов, описанных выше, выполняется адаптивная обработка сигналов.
В первом блоке обработки сигналов размер матрицы средней корреляции составляет (NL/2)×(NL/2). Размер матрицы средней корреляции составляет (NE/2)×(NE/2) во втором блоке обработки сигналов. Поскольку соответствующие обратные матрицы вычисляются независимо, общий объем обработки пропорционален кубу размеров ((NE/2) и (NL/2)).
Для примера будет описана адаптивная обработка сигналов, при которой принимаемые сигналы используются в случае 64 элементов (NL) в направлении матрицы одномерного матричного зонда и в случае 32 срезов (NE) в угломестном направлении. Размер матрицы для вычисления обратной матрицы равен 32×32 в первом блоке обработки сигналов и 16×16 во втором блоке обработки сигналов. Этот размер матриц меньше 1024×1024 при адаптивной обработке сигналов, описанной выше, выполняемой на всех двумерных входах. Поскольку рабочая нагрузка в случае обратной матрицы пропорциональна кубу размера матрицы, соотношение между объемами обработки для конфигурации настоящего изобретения и обработки, выполняемой на всех двумерных входах, составляет (32∧3+16∧3):(1024∧3)=9:64∧3, при этом рабочая нагрузка снижается до около 1/29000. Таким образом, адаптивную обработку сигналов можно применять с получением уменьшенного объема обработки. Однако согласно настоящему изобретению желательное количество (множество) входов (или количество NL или NE) при выполнении адаптивной обработки сигналов в первом блоке обработки сигналов или втором блоке обработки сигналов может быть равно трем или большему числу. Желательное количество (множество) входов (или количество NL или NE) при обработке с задержкой и суммированием или обработке с синтезированной апертурой в первом блоке обработки сигналов или втором блоке обработки сигналов может быть равно двум или большему числу.
При наличии описанного способа обработки, предназначенного для непосредственного получения обратной матрицы, такой же эффект может быть получен путем решения системы линейных уравнений с выполнением процесса QR-разложения и обработки с обратной подстановкой относительно матрицы средней корреляции, поскольку рабочая нагрузка пропорциональна кубу размера матрицы.
При наличии описанного выше примера, в котором направление механического сканирования одномерного матричного зонда нормально к направлению матрицы зонда (то есть сканирования в угломестном направлении), направление механического сканирования согласно настоящему изобретению может быть любым направлением за исключением направления, которое нормально к направлению матрицы. Настоящее изобретение применимо к перемещению зонда, имеющего высокую степень свободы, при мониторинге величины и направления перемещения зонда, захвате положений зонда, для которых вычисляются сигналы линий сканирования, и работе второго блока обработки сигналов с использованием информации о местоположении.
Количество элементов, размещаемых в зонде, может быть любым большим числом, которое равно двум или больше двух, и можно располагать любое желательное количество элементов. Кроме того, при наличии описанного способа, в котором сканируют одномерным зондом для получения ультразвука, представленный способ также применим к принимаемым ультразвуковым сигналам, которые одновременно получает двумерный матричный зонд, имеющий элементы в двух измерениях. Принимаемые сигналы, подводимые с двумерного матричного зонда, могут быть разделены по двум направлениям, по направлению одномерной матрицы и направлению, которое нормально к направлению одномерной матрицы, а первый блок обработки сигналов и второй блок обработки сигналов могут быть использованы для направлений.
При наличии описанной выше обработки принимаемых сигналов, получаемых путем излучения ультразвука и приема отраженных волн, настоящее изобретение не ограничено этой формой. Например, результат настоящего изобретения можно получать при выполнении такой же обработки принимаемого сигнала, получаемого путем излучения света (электромагнитных волн) к субъекту и приема акустических волн, формируемых вследствие фотоакустического эффекта. Однако направление для вычисления первого и/или второго выходных сигналов может отличаться от направления в случае использования ультразвукового эхо-сигнала. Как описывалось выше, в случае использования ультразвукового эхо-сигнала первый выходной сигнал и/или второй выходной сигнал вычисляются вдоль направления линии сканирования для получения первого выходного сигнала и/или второго выходного сигнала на линии (линии сканирования), соответствующей направлению глубины исследуемого объекта. Однако в случае использования фотоакустического эффекта первый выходной сигнал и/или второй выходной сигнал могут обрабатываться в реальном времени с выполнением вычисления в направлении, ортогональном к направлению глубины исследуемого объекта. Кроме того, сигналы, сохраняемые в запоминающем устройстве, можно вычислять в любом порядке.
Таким образом, настоящим изобретением можно уменьшить объем обработки при адаптивной обработке сигналов, когда адаптивную обработку сигналов применяют для получения данных изображения, имеющих высокое пространственное разрешение. Варианты выполнения настоящего изобретения будут описаны с обращением к чертежам.
ПЕРВЫЙ ВАРИАНТ ВЫПОЛНЕНИЯ
В устройстве согласно этому варианту выполнения механически сканируется одномерный матричный зонд и в то же самое время в первом блоке обработки сигналов используются задержки и суммирование, а во втором блоке обработки сигналов используется адаптивная обработка сигналов. На фиг. 3 представлено концептуальное схематичное представление, где зонд 302, имеющий множество элементов 301, расположенных в одном измерении, механически сканируется из положения 303 к положению 305. Направлением 308 матрицы называется направление матрицы элементов 301, а направлением 307 механического сканирования называется направление, в котором зонд 302 перемещается при механическом сканировании.
Обращаясь к фиг. 4, работа устройства будет описана с момента, когда зонд 302 находится в положении 303. На фиг. 4 представлена структурная схема устройства с использованием ультразвукового эхо-сигнала, которое представляет собой устройство для получения информации о субъекте согласно этому варианту выполнения.
Сначала будет описана работа в режиме излучения. Информация о направлении излучения поступает с системного управляющего блока 401 на схему 402 излучения. Схема 402 излучения вычисляет время задержки в соответствии с матрицей элементов зонда и выводит сигнал напряжения к переключающей схеме 403. Переключающая схема 403 избирательно соединяет используемые элементы зонда 302 и схему излучения. Например, в случае линейного сканирования 64 элемента из матрицы элементов 256 каналов последовательно выбираются и подключаются к схеме излучения. Ультразвук излучается от зонда 302 внутрь субъекта.
Далее будет описана работа первого блока обработки сигналов. Ультразвук, отражающийся в соответствии с распределением акустического импеданса в субъекте, принимается элементом и преобразуется в принимаемый сигнал, который представляет собой электрический сигнал. После этого сигнал, принимаемый каждым элементом, подводится через переключающую схему 403 к первому блоку 410 обработки сигналов. В схеме 404 обработки задержек и суммирования используются принимаемый сигнал, подводимый через переключающую схему 403, и информация о положении исследуемого объекта, подводимая с системного управляющего блока 401, для выполнения того, что называется задержкой и суммированием сигналов, когда принимаемые сигналы, соответствующие ультразвуку из целевого местоположения, суммируются после выполнения обработки задержек для выравнивания фаз сигналов. Сигнал линии сканирования (первый выходной сигнал) для каждого положения исследуемого объекта, который вычисляется так, как описано выше, сохраняется в запоминающем устройстве 405.
Цикл излучения и приема повторяется при замене элемента 301, подключаемого переключающей схемой 403 (например, путем последовательного перемещения по подключаемым элементам в направлении матрицы). Сигналы линий сканирования, вычисляемые первым блоком 410 обработки сигналов, сохраняются в запоминающем устройстве 405.
Далее с обращением к фиг. 5 будет описано перемещение зонда. Фиг. 5 соответствует виду сверху из фиг. 3 и иллюстрирует относительное положение зонда и получаемых сигналов линий сканирования. Системный управляющий блок 401 посылает управляющий сигнал на схему 414 управления платформой и перемещает зонд 302 в положение 304. Кроме того, для положения 304, подобно тому, как это делалось для положения 303, сигналы линий сканирования вычисляются первым блоком 410 обработки сигналов и сохраняются в запоминающем устройстве 405.
Как показано на фиг. 5, при повторении этой операции получаются три сигнала (с 501 по 506) линий сканирования для каждого из положения 303 и положения 304. Затем зонд 302 перемещается в положение 305 и такая же обработка, как для положений 303 и 304, выполняется для вычисления сигнала 507 линии сканирования и сохранения его в запоминающем устройстве 405.
Снова обратимся к фиг. 4, с использованием которой будет описано прохождение сигнала во втором блоке обработки сигналов. Сигналы с 501 по 507 линий сканирования сохраняются в запоминающем устройстве 405. Сигнал 501 линии сканирования, сигнал 504 линии сканирования и сигнал 507 линии сканирования выбираются из сигналов линий сканирования и второй блок 420 обработки сигналов выполняет обработку их.
Схема 406 обработки задержек принимает сигнал 501 линии сканирования, сигнал 504 линии сканирования и сигнал 507 линии сканирования из запоминающего устройства 405 во втором блоке обработки сигналов, и информацию о положении исследуемого объекта, и информацию о положении зонда с системного управляющего блока 401. На основании принимаемой информации о положении исследуемого объекта и информации о положении зонда в тех случаях, когда сигналы линий сканирования получены, обработка задержек выполняется по сигналам линий сканирования. При обработке задержек время задержек вычисляется с учетом периода времени от излучения ультразвука из местоположения зонда до возврата к исходному местоположению зонда при прохождении через целевое местоположение (или с учетом времени, необходимого для прохождения сигнала туда и обратно). Над сигналами линий сканирования выполняется преобразование Гилберта и сигналы выводятся в комплексном представлении.
Таким образом, сигналы линий сканирования после обработки задержек подводятся к схеме 407 вычисления матрицы частичной корреляции. Схема 407 вычисления матрицы частичной корреляции извлекает сигналы некоторого количества выборок (такого как 10 выборок), необходимых для вычисления матрицы корреляции по входному сигналу линии сканирования, образует матрицу корреляции и усредняет подматрицы для вычисления матрицы средней корреляции. Схема 407 вычисления матрицы частичной корреляции непрерывно вычисляет матрицу средней корреляции для входных сигналов линий сканирования. Иначе говоря, матрица средней корреляции обновляется и выводится при изменении сигнала линии сканирования.
Схема 408 вычисления веса вычисляет матрицу, обратную к входной матрице средней корреляции, и при необходимости использует ограниченный вектор, подводимый с системного управляющего блока 401, для вычисления веса. Вес изменяется в соответствии с обновлением матрицы средней корреляции. Схема 409 вычисления синтезированного сигнала линии сканирования по сигналу линии сканирования и весу, вычисленному на основании сигнала линии сканирования, вычисляет синтезированный сигнал линии сканирования (второй выходной сигнал) и выводит его к схеме 411 фильтрации сигнала.
Таким образом, во втором блоке обработки сигналов применяется адаптивная обработка сигналов для вычисления и вывода синтезированного сигнала линии сканирования. Схема 411 фильтрации сигнала при необходимости может выполнять обработку, такую, как например полосовая фильтрация, подводимого синтезированного сигнала линейного сканирования и получать огибающую сигнала. По команде, поступающей с системного управляющего блока, со схемы 411 фильтрации выводится логарифмически сжатая интенсивность сигнала. Блок 412 обработки изображения при необходимости может выполнять фильтрацию изображения (такую как выделение краев и сглаживание) и также выполнять обработку, соответствующую способу отображения (такому как отображение поперечных срезов и трехмерное воспроизведение), при поступлении команды с системного управляющего блока 401, для формирования данных трехмерного изображения для отображения. Данные трехмерного изображения передают на устройство 413 воспроизведения изображения и на устройстве 413 воспроизведения изображения отображают трехмерное изображение.
На фиг. 6 показано схематичное представление, иллюстрирующее зависимость между моментами получения сигналов линий сканирования и временным режимом работы второго блока 420 обработки сигналов. На верхней части фиг. 6 показана временная диаграмма излучения ультразвука и обработки при приеме, выполняемых при нахождении зонда 302 в положениях 303, 304 и 305. Согласно этому варианту выполнения временной интервал 604 излучения и временной интервал 605 обработки при приеме повторяются. Согласно этому варианту выполнения на каждом временном интервале 605 обработки при приеме первый блок обработки сигналов выполняет обработку 610 сигнала (задержку и суммирование) для вычисления сигналов с 501 по 509 линий сканирования, которые затем сохраняются в запоминающем устройстве. Когда сигналы 501, 504 и 507 линий сканирования получены, второй блок обработки сигналов начинает обработку 620 сигналов (адаптивную обработку сигналов согласно этому варианту выполнения) и после обработки выводит синтезированный сигнал 601 линии сканирования. Когда сигналы 502, 505 и 508 линий сканирования получены, начинается следующая обработка и выводится синтезированный сигнал 602 линии сканирования. Таким образом, второй блок обработки сигналов начинает обработку для вычисления синтезированного сигнала линии сканирования в случае, когда необходимый сигнал линии сканирования получен.
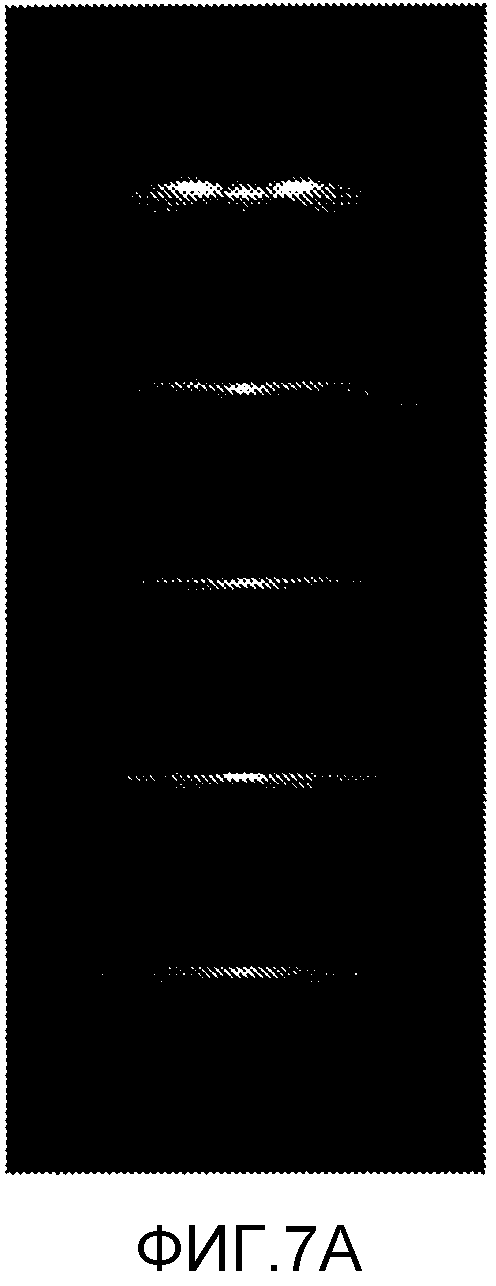
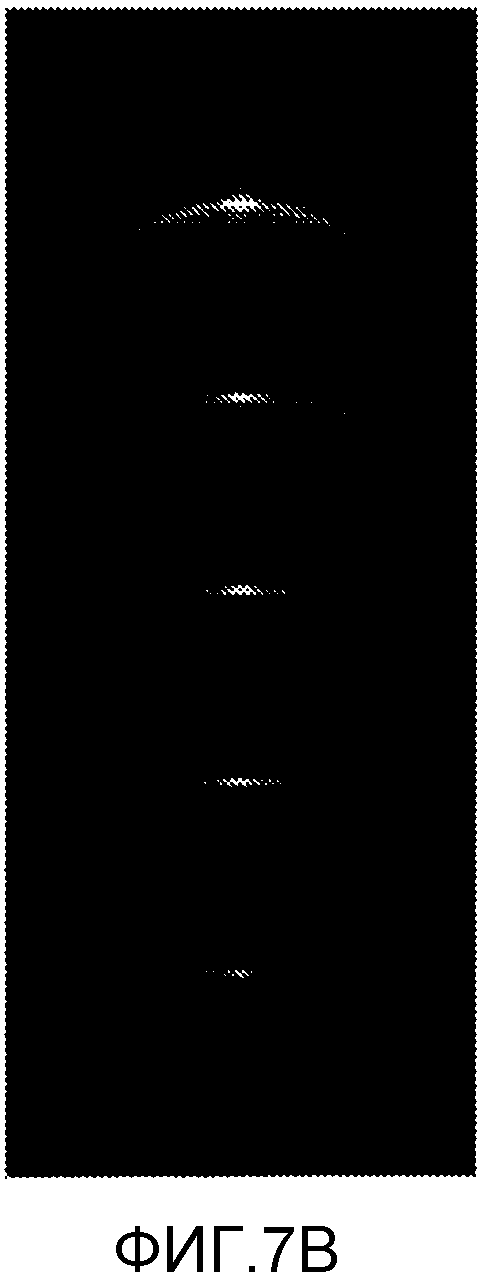
На фиг. 7А и 7В показаны изображения, полученные в результате моделирования случая, когда пять проводников были расположены параллельно направлению матрицы одномерного матричного зонда. На фиг. 7А и 7В представлены разрезы, включающие направление механического сканирования и направление глубины, подлежащее исследованию. На фиг. 7А показано изображение, полученное в результате задержки и суммирования в направлении матрицы и обработки с синтезированной апертурой в направлении механического сканирования. На фиг. 7В показано изображение, полученное в результате задержки и суммирования в первом блоке обработки сигналов и адаптивной обработки сигналов во втором блоке обработки сигналов согласно этому варианту выполнения. Пространственное разрешение изображения на фиг. 7В является более высоким в результате обработки согласно этому варианту выполнения.
Таким образом, согласно этому варианту выполнения применение адаптивной обработки сигналов во втором блоке обработки сигналов позволяет получать устройство, в котором можно сократить объем адаптивной обработки сигналов и в частности получить высокое пространственное разрешение в направлении механического сканирования.
Согласно этому варианту выполнения зонд перемещается вследствие механического сканирования. Однако информация о местоположении при получении сигналов линий сканирования захватывается датчиком положения или блоком обработки изображения. Поэтому настоящее изобретение применимо к зонду, который перемещается свободно, при этом обеспечивается повышенное пространственное разрешение.
По сравнению со случаем, когда зонд перемещается свободно, при механическом сканировании зонда с использованием платформы можно точно захватывать положения получения сигналов линий сканирования относительно положения исследуемого объекта. Схема обработки задержек позволяет делать это с высокой точностью и может обеспечивать более высокое пространственное разрешение.
Согласно этому варианту выполнения для получения данных зонд все же задерживается в положениях 303, 304 и 305. Однако на практике обработка сигналов может выполняться тем же самым способом в случае, когда зонд перемещается непрерывно, и может быть получен такой же результат.
ВТОРОЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Согласно этому варианту выполнения одномерный матричный зонд сканирует механически и вместе с тем в первом блоке обработки сигналов и втором блоке обработки сигналов используется адаптивная обработка сигналов.
Поскольку временная диаграмма сканирования и временная диаграмма действий, выполняемых первым блоком обработки сигналов и вторым блоком обработки сигналов, такие же, как рассмотренные, их описание будет опущено. Будет описана только часть обработки сигналов.
На фиг. 8 представлена структурная схема устройства согласно этому варианту выполнения. Прежде всего будет описан режим излучения. В режиме излучения информация относительно направления излучения подводится с системного управляющего блока 401 к схеме 402 излучения. В схеме 402 излучения время задержки вычисляется в соответствии с матрицей элементов зонда и со схемы выводится сигнал напряжения на переключающую схему 403. Переключающая схема 403 избирательно соединяет используемые элементы зонда 302 и схему 402 излучения. Например, в случае линейного сканирования 64 элемента из матрицы элементов 256 каналов последовательно выбираются и подключаются к схеме 402 излучения. Ультразвук излучается от зонда 302 внутрь субъекта.
Далее будет описана работа первого блока обработки сигналов, в котором используется адаптивная обработка сигналов. Ультразвук, отражающийся внутри субъекта в соответствии с распределением акустического импеданса, преобразуется ультразвуковым преобразователем в принимаемый сигнал, который представляет собой электрический сигнал. После этого принимаемый сигнал через переключающую схему 403 подводится к первому блоку 810 обработки сигналов. Схема 801 обработки задержек в первом блоке обработки сигналов получает принимаемый сигнал с элемента и также получает информацию о положении исследуемого объекта с системного управляющего блока 401. В схеме 801 обработки задержек входная информация о положении исследуемого объекта используется для выполнения обработки задержек для осуществления выравнивания фаз принимаемых сигналов, соответствующих ультразвуку из целевого местоположения. Над сигналами линий сканирования выполняется преобразование Гилберта и сигналы выводятся в комплексном представлении.
Схема 802 вычисления матрицы частичной корреляции извлекает сигналы некоторого количества выборок, необходимых для вычисления матрицы корреляции по входному сигналу линии сканирования, образует матрицу корреляции и усредняет подматрицы для вычисления матрицы средней корреляции. Схема 802 вычисления матрицы частичной корреляции непрерывно вычисляет матрицу средней корреляции для входных принимаемых сигналов. Иначе говоря, матрица средней корреляции обновляется и выводится при изменении принимаемого сигнала.
Схема 803 вычисления веса вычисляет матрицу, обратную к входной матрице средней корреляции, и при необходимости использует ограниченный вектор, подводимый с системного управляющего блока 401, для вычисления веса. Вес изменяется в соответствии с обновлением матрицы средней корреляции.
В схеме 804 вычисления сигнала линии сканирования входной принимаемый сигнал и вес, вычисленный на основании принимаемого сигнала, используются для вычисления выходного сигнала и вывода его в качестве сигнала линии сканирования (первого выходного сигнала). Как описывалось выше, результирующий сигнал линии сканирования имеет фазу сигнала, принимаемого из целевого местоположения. Выходной сигнал линии сканирования сохраняется в запоминающем устройстве 805.
После этого переключающая схема 403 осуществляет переключение, производится получение сигналов линий сканирования для множества различных положений с помощью операции замены элемента, используемого в направлении матрицы, и перемещения зонда, при этом сигналы сохраняются в запоминающем устройстве 805. Эта операция такая же, как в первом варианте выполнения.
Далее будет описан второй блок обработки сигналов. Второй блок 820 обработки сигналов начинает обработку при получении сигналов линий сканирования, необходимых для обработки. Схема 806 обработки задержек во втором блоке обработки сигналов получает сигнал линии сканирования с запоминающего устройства 405, информацию о положении исследуемого объекта с системного управляющего блока 401 и информацию о местоположении зонда. Обработка задержек выполняется относительно сигнала линии сканирования на основании входной информации о положении исследуемого объекта и информации о местоположении зонда, когда сигнал линии сканирования получен. Фазированный задержанный сигнал линии сканирования подводится к схеме 807 вычисления матрицы частичной корреляции.
Схема 807 вычисления матрицы частичной корреляции извлекает сигналы некоторого количества выборок, необходимых для вычисления матрицы корреляции по входному сигналу линии сканирования, образует матрицу корреляции и усредняет подматрицы для вычисления матрицы средней корреляции. Схема 807 вычисления матрицы частичной корреляции непрерывно вычисляет матрицу средней корреляции для входного сигнала линии сканирования. Иначе говоря, матрица средней корреляции обновляется и выводится при изменении сигнала линии сканирования.
Схема 808 вычисления мощности синтезированного сигнала линии сканирования вычисляет матрицу, обратную к входной матрице средней корреляции, и использует при необходимости ограниченный вектор, подводимый с системного управляющего блока 401, для вычисления веса. Мощность синтезированного сигнала линии сканирования выводится в качестве второго выходного сигнала. Второй выходной сигнал представляет собой мощность синтезированного сигнала линии сканирования (без положительного/отрицательного значения, только с положительным значением). Мощность синтезированного сигнала линии сканирования изменяется в соответствии с обновлением матрицы средней корреляции.
Таким образом, мощность синтезированного сигнала линии сканирования вычисляется вторым блоком обработки сигналов и выводится к схеме 411 фильтрации сигнала. С использованием входной мощности синтезированного сигнала линии сканирования схема 411 фильтрации сигнала выводит логарифмически сжатую интенсивность сигнала по команде с системного управляющего блока 401. Блок 412 обработки изображения может выполнять фильтрацию изображения (такую как выделение краев и сглаживание) и при необходимости также выполнять обработку, соответствующую способу отображения (такому как отображение поперечных срезов и трехмерное воспроизведение), при поступлении команды с системного управляющего блока 401 для формирования данных трехмерного изображения для отображения. Устройство 413 воспроизведения изображения отображает трехмерное изображение на основе данных трехмерного изображения, передаваемых с блока 412 обработки изображения.
Согласно этому варианту выполнения второй блок обработки сигналов вычисляет непосредственную мощность на основании матрицы средней корреляции. Таким образом, нет необходимости в том, чтобы выходной сигнал второго блока обработки сигналов имел фазу сигнала, соответствующего ультразвуку из целевого местоположения. Поэтому можно вычислять и выводить непосредственную мощность.
Согласно этому варианту выполнения в первом блоке обработки сигналов и втором блоке обработки сигналов применяется адаптивная обработка сигналов. Выходной сигнал первого блока обработки сигналов вычисляется при получении внутреннего произведения веса и он может иметь фазу сигнала, соответствующего ультразвуку из целевого местоположения, и принимаемого сигнала. Поэтому во втором блоке обработки сигналов можно применять адаптивную обработку сигналов. Следовательно, можно получать устройство, в котором можно уменьшать объем обработки сигналов и иметь высокое пространственное разрешение в направлении матрицы элементов и направлении механического сканирования.
Согласно этому варианту выполнения в первом блоке обработки сигналов и втором блоке обработки сигналов можно применять адаптивную обработку сигналов. Однако во втором блоке обработки сигналов можно применять обработку с синтезированной апертурой, включающую в себя обработку задержек и суммирование при получении выходного сигнала первого блока обработки сигналов на основе внутреннего произведения веса, который может иметь фазу ультразвукового сигнала из целевого местоположения и принимаемого сигнала. В этом случае можно получать устройство, которое имеет высокое пространственное разрешение в направлении матрицы.
Даже при использовании двумерного матричного зонда результат настоящего изобретения можно получать путем вычисления сигнала линии сканирования первым блоком обработки сигналов.
ТРЕТИЙ ВАРИАНТ ВЫПОЛНЕНИЯ
Настоящее изобретение можно реализовать путем выполнения следующего процесса. А именно, программное обеспечение (программу), которое реализует функции приведенных выше вариантов выполнения, поставляют в систему или устройство по сети или на носителе данных. Вычислитель (такой как центральный процессор или микропроцессорное устройство) в системе или устройстве считывает и выполняет программу.
Хотя настоящее изобретение было описано с обращением к примерным вариантам выполнения, следует понимать, что изобретение не ограничено раскрытыми примерными вариантами выполнения. Объем нижеследующей формулы изобретения следует интерпретировать самым широким образом, включая все модификации и эквивалентные структуры и функции.
По этой заявке испрашивается приоритет заявки №2010-207894 на патент Японии, поданной 16 сентября 2010 года, которая в полном объеме включена в эту заявку путем ссылки.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 - Первый блок обработки сигналов
20 - Второй блок обработки сигналов
101 - Схема обработки задержек
102 - Схема вычисления матрицы усредненной корреляции
103 - Схема вычисления веса
104 - Схема вычисления первого выходного сигнала
105 - Запоминающее устройство
106 - Схема обработки задержек
107 - Схема вычисления матрицы усредненной корреляции
108 - Схема вычисления веса
109 - Схемы вычисления второго выходного сигнала
301 - Элемент
302 - Зонд
401 - Системный управляющий блок
402 - Схема излучения
403 - Переключающая схема
404 - Схема обработки задержек и суммирования
405 - Запоминающее устройство
406 - Схема обработки задержек
407 - Схема вычисления матрицы частичной корреляции
408 - Схема вычисления веса
409 - Схема вычисления синтезированного сигнала линии сканирования
410 - Первый блок обработки сигналов
411 - Схема фильтрации сигнала
412 - Блок обработки изображения
413 - Устройство воспроизведения изображения
414 - Схема управления платформой
420 - Второй блок обработки сигналов
501-509 - Сигнал линии сканирования
601, 602, 603 - Синтезированный сигнал линии сканирования.
Устройство формирования рентгеновских изображений и способ формирования рентгеновских изображений
Ролик проявления и способ его изготовления, технологический картридж и устройство для формирования электрофотографического изображения
Контейнер подачи проявителя и система подачи проявителя
Новое соединение хризена и органическое светоизлучающее устройство, в котором применяют это соединение
Способ и устройство для измерения электромагнитной волны
Полупроводниковое устройство, головка для выброса жидкости, картридж для выброса жидкости и устройство для выброса жидкости
Устройство съемки изображения
Устройство формирования изображения
Устройство обнаружения, способ его изготовления и система обнаружения
Фотоакустическое измерительное устройство
Устройство формирования рентгеновских изображений и способ формирования рентгеновских изображений
Ролик проявления и способ его изготовления, технологический картридж и устройство для формирования электрофотографического изображения
Контейнер подачи проявителя и система подачи проявителя
Новое соединение хризена и органическое светоизлучающее устройство, в котором применяют это соединение
Способ и устройство для измерения электромагнитной волны
Полупроводниковое устройство, головка для выброса жидкости, картридж для выброса жидкости и устройство для выброса жидкости
Устройство съемки изображения
Устройство формирования изображения
Устройство обнаружения, способ его изготовления и система обнаружения
Фотоакустическое измерительное устройство

