Результат интеллектуальной деятельности: СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
Вид РИД
Изобретение
Изобретение относится к области транспортного машиностроения и может быть использовано в тяговых асинхронных электроприводах автономных транспортных средств, в том числе пневмоколесных машин, тракторов, а также тепловозов.
Известен способ оптимального частотного управления асинхронным электродвигателем, питаемым посредством соответствующего преобразователя напряжения от генератора, приводимого двигателем внутреннего сгорания (ДВС), заданием требуемого значения электромагнитного момента на его валу в функции частоты вращения путем формирования напряжения с определенными значениями амплитуды и скольжения (Патент РФ №2402865. Способ оптимального частотного управления асинхронным двигателем. 2010), использующий в качестве исходных данных заранее введенные или полученные экспериментально параметры схемы замещения электродвигателя.
Этот способ обеспечивает возможность реализации заданных значений момента на валу электродвигателя в пусковом режиме (с погрешностью, определяемой степенью соответствия параметров расчетной модели электродвигателя его реальным параметрам), а также возможность реализации заданного значения мощности ДВС при его работе на частичных и предельной характеристиках. Основным недостатком этого способа является невысокая точность реализации как задаваемых значений реализуемых моментов, так и оптимальных значений амплитуд и частот напряжений, формируемых преобразователем напряжения, в связи с возможными существенными отклонениями значений параметров схемы замещения, используемых при расчетах, от значений соответствующих параметров реального электродвигателя. Автоматическим перерасчетом (идентификацией) параметров схем замещения электродвигателя в процессе его работы, попытки которого предпринимаются разработчиками промышленных электроприводов при использовании их разработок в тяговом электроприводе (А.Б. Виноградов и др. Учет потерь и насыщения стали при векторном управлении тяговым асинхронным электроприводом. «Вестник ИГЭУ, 2012 г., Вып.1, с.35-41), указанные погрешности могут быть уменьшены до 10-20%. Однако требуемое для обеспечения даже такой (довольно невысокой) точности усложнение системы управления может сделать невозможным практическую реализацию этого способа. При определенном усложнении системы регулирования этот способ может быть применен и в многодвигательном тяговом электроприводе. Однако для обеспечения такой возможности следует дополнительно учитывать влияние взаимосвязей частот вращения электродвигателей, обусловленного наличием контактов приводимых ими колес с опорной поверхностью, и связанную с этим возможность перераспределения нагрузок между электродвигателями и, следовательно, тяговых усилий между соответствующими колесами.
Известен другой способ управления асинхронным тяговым электродвигателем тепловоза (Патент РФ №2451389. Способ управления асинхронным тяговым двигателем. 2010), при котором измеряют его частоту вращения, потребляемый им ток и активную составляющую мощности преобразователя напряжения, питающего этот электродвигатель. При этом амплитуду напряжения электродвигателя формируют с учетом заданных положением контроллера машиниста значений его фазного тока и активной мощности, а частоту формируемого напряжения задают с учетом заранее рассчитанной зависимости оптимального скольжения электродвигателя. При работе электродвигателя в режиме, близком к ограничению напряжения, формируют добавочное скольжение сигналом разности между максимальным заданным и вычисленным значениями напряжения электродвигателя, которое суммируют с указанным выше оптимальным скольжением. Заданием максимального значения напряжения, при котором должно быть реализовано заданное значение мощности электродвигателя, на уровне 0,98·Umax, где Umax - максимально допустимое значение напряжения, обеспечивают режим постоянства мощности при работе тягового электропривода в режимах ограничения мощности ДВС и, тем самым, выравнивание мощностей всех электродвигателей тепловоза. Используемую при этом зависимость оптимального скольжения от величины фазного тока определяют по результатам предварительных стендовых испытаний для конкретного типа электродвигателей.
Использование заранее рассчитанных зависимостей оптимального скольжения способствует, в сравнении с ранее описанным способом, более эффективной оптимизации работы электродвигателей в пусковом режиме, а задание одинаковых значений активных мощностей, реализуемых на выходах преобразователей при работе в режиме ограничения по мощности, и дополнительная коррекция скольжения каждого электродвигателя при работе в режиме ограничения по напряжению - выравниванию тяговых усилий, реализуемых колесами тепловоза, что, в свою очередь, способствует уменьшению сопротивления движению и соответствующему уменьшению износа контактных поверхностей колес.
Этот способ применим к регулированию тягового электропривода тепловоза с генератором переменного тока, приводимым от ДВС и питающим через общий выпрямитель и индивидуальные преобразователи напряжения соответствующие тяговые асинхронные электродвигатели. Формируемые таким способом зависимости выпрямленного напряжения Ud от тока нагрузки Id выпрямителя при различных частотах вращения nг генератора подобны друг другу, в том числе и в зоне ограничения по максимально допустимому напряжению Udmax, с коэффициентами подобия, пропорциональными соответствующим значениям nг.
К недостаткам рассматриваемого электропривода относится сложность его реализации, обусловленная необходимостью предварительных специальных стендовых испытаний, а также определенная неоптимальность зависимостей задаваемых значений скольжений от значений фазных токов, обусловленная тем, что они рассчитаны по результатам испытаний электродвигателя в стоповом режиме, т.е. без учета потерь мощности в стали, соответствующих реальным режимам работы электродвигателей.
Кроме того, определенные сложности реализации этого способа в пусковом режиме могут быть вызваны необходимостью обеспечения высоких (существенно выше номинальных) значений тока возбуждения генератора, а при движении в режиме ограничения мощности - наличием дополнительных контуров регулирования добавочных скольжений. Дополнительная сложность реализации этого способа при движении на высоких скоростях может быть связана с повышенным риском входа в зону, недопустимую по перегрузочной способности электродвигателя.
Дополнительный недостаток этого способа заключается в невозможности его применения в тяговых электроприводах пневмоколесных транспортных средств, использующих в качестве органа управления не контроллер с конечным количеством позиций, а устройство с плавным заданием режима работы ДВС, например педаль газа, положением которой водитель задает его частоту вращения. Кроме того, при регулировании этим способом тяговых электроприводов пневмоколесных машин расхождение частот вращения электродвигателей разных бортов при движении в повороте приводит к расхождениям тяговых усилий колес разных бортов и, соответственно, к появлению момента, препятствующего повороту, что, в свою очередь, приводит к увеличению сопротивления движению и, соответственно, к увеличению износа пневмошин и уменьшению кпд тягового привода.
Технической задачей, решаемой заявляемым способом регулирования автономного тягового электропривода с общим для всех тяговых асинхронных электродвигателей звеном постоянного тока, питаемым от генератора переменного тока, является совместное регулирование генератора и электродвигателей, обеспечивающее:
- регулирование выпрямленного напряжения Ud в зависимости от выпрямленного тока Id генератора и частоты его вращения nг, обеспечивающее работу ДВС в режимах наибольшей экономичности, а также ограничения значений напряжения пускового режима Udn и максимально допустимого напряжения Udmax, что способствует повышению надежности;
- регулирование напряжений электродвигателей в зависимости от их частот вращения, способствующее выравниванию тяговых усилий активных колес, и от частоты вращения генератора, способствующее потреблению ими мощностей, суммарное значение которых соответствует зависимости Pd(nг), формируемой системой регулирования генератора.
Технический эффект, получаемый при решении поставленной задачи, достигается посредством формирования подобных друг другу зависимостей выпрямленных напряжений Ud от токов нагрузки Id при различных частотах nг вращения генератора с коэффициентами подобия, пропорциональными соответствующим значениям nг, в том числе в зонах ограничений по максимально допустимым значениям напряжения Udmax(nг) и мощности Pdmax(nг), посредством формирования сигналов обратных связей по напряжению Uoc, току Ioc и мощности Poc в виде: Uoc=Ud·(nгн/nг)k1·kn, Ioc=Id·(nгн/nг)k1 и Poc=Uoc·Ioc, где k1=(1,0÷1,3) - коэффициент, определяемый требуемой зависимостью Pd(nг), kn - коэффициент, определяемый режимом работы электропривода, а также посредством оптимального регулирования величины Ui и частоты fi напряжения каждого электродвигателя в функции его частоты вращения ni. При этом регулирование величины напряжения Ud осуществляют в функции сигнала рассогласования между сигналом уставки Руст и максимальным из сигналов Uoc и Poc, частоту fi напряжения, формируемого соответствующим преобразователем на фазах i-го электродвигателя, рассчитывают по формуле: fi=p·n/60+fsi, где p - число пар полюсов электродвигателя, fsi - максимальная из частот fs1i и fs2i, первую из которых рассчитывают по формуле fs1i=fs0·(nг/nгн)k2-kfs·(nг/nгн)k3·ncp, а вторую -  , а величину напряжения Ui, формируемого соответствующим преобразователем и определяемого выражением Ui=kcx·kmi·Ud, где kcx - коэффициент, определяемый схемой преобразователя, kmi - коэффициент модуляции i-гo преобразователя, равный отношению значения напряжения на выходе преобразователя к максимально возможному значению этого параметра при текущем значении Ud и km=1, регулируют при Рос<Руст, или (при движении с замедлением) сразу после выполнения условия Iфср≥Iфmax·(nг/nгн)k4, сигналом рассогласования между сигналом уставки фазного тока УстIфi, определяемым формулой УстIфi=Iф0·(nг/nгн)k1-kIф(nг/nгн)k5·ncp, и сигналом обратной связи по фазному току Iфi, а при Рос≥Pуст - сигналом рассогласования между сигналом уставки выпрямленного тока УстId и сигналом обратной связи по выпрямленному току Idi, потребляемому соответствующим преобразователем, причем при изменении коэффициентов модуляции преобразователей в диапазоне 0≤km<1 или (при движении с замедлением) сразу после выполнения условия Iос>Idmах·(nг/nгн)k1, значение сигнала уставки УстId рассчитывают по формуле УстId=Руст·(nг/nгн)2·k1/Ud/mдв, значение коэффициента kn при этом принимают равным заданному отношению Udmax(nгн)/Udn(nгн), а при достижении коэффициентом модуляции km, по крайней мере, одного преобразователя величины km=1 или (при повторном пуске с ненулевой скорости) при превышении частотой вращения ncp значения ncp≥n1·(nг/nгн)k6, значение УстId принимают равным УстId>Idmax, а значение коэффициента kn - равным kn=1, где: ncp и Icp - средние значения, соответственно, частот вращения и фазных токов электродвигателей; fs0, kfs, Iф0, kIф -коэффициенты, определенные по результатам предварительных расчетов из условия обеспечения минимума потерь мощности в электродвигателе при разгоне транспортного средства в режиме повышения напряжения при nг=nгн; k2, k3 и k5 - коэффициенты, учитывающие изменения значений fs1i, и УстIфi при отклонении текущего значения nг от значения nгн; Iфmax - расчетное максимальное значение фазного тока электродвигателя, соответствующее работе тягового электропривода при выполнении условий: nг=nгн и Рос=Pуст; Idmax - расчетное максимальное значение Id при nг=nгн; n1 - расчетное минимальное значение частоты вращения электродвигателя при nг=nгн, соответствующее режиму работы питающего его преобразователя с коэффициентом km=1; k4 и k6 - коэффициенты, учитывающие изменения значений параметров, соответственно, Icp и ncp, при которых изменяют законы изменения уставок регулируемых параметров при отклонении текущего значения nг от значения nгн при постоянных значениях параметров, соответственно, Iфmax и n1; Udn(nгн) - максимальное расчетное значение напряжения Ud в пусковом режиме при nг=nгн; а0, …, am - коэффициенты полинома m-й степени, рассчитанные из условия потребления из звена постоянного тока с расчетным значением напряжения Udp=Udmax(nг)/Kp электродвигателем, имеющим номинальные значения паспортных параметров, значения мощности Pdдв=Pd(nг)/mдв, где Кр -коэффициент, определяемый возможным отклонением реальных параметров электродвигателей от номинальных (Кр=1,05÷1,1).
, а величину напряжения Ui, формируемого соответствующим преобразователем и определяемого выражением Ui=kcx·kmi·Ud, где kcx - коэффициент, определяемый схемой преобразователя, kmi - коэффициент модуляции i-гo преобразователя, равный отношению значения напряжения на выходе преобразователя к максимально возможному значению этого параметра при текущем значении Ud и km=1, регулируют при Рос<Руст, или (при движении с замедлением) сразу после выполнения условия Iфср≥Iфmax·(nг/nгн)k4, сигналом рассогласования между сигналом уставки фазного тока УстIфi, определяемым формулой УстIфi=Iф0·(nг/nгн)k1-kIф(nг/nгн)k5·ncp, и сигналом обратной связи по фазному току Iфi, а при Рос≥Pуст - сигналом рассогласования между сигналом уставки выпрямленного тока УстId и сигналом обратной связи по выпрямленному току Idi, потребляемому соответствующим преобразователем, причем при изменении коэффициентов модуляции преобразователей в диапазоне 0≤km<1 или (при движении с замедлением) сразу после выполнения условия Iос>Idmах·(nг/nгн)k1, значение сигнала уставки УстId рассчитывают по формуле УстId=Руст·(nг/nгн)2·k1/Ud/mдв, значение коэффициента kn при этом принимают равным заданному отношению Udmax(nгн)/Udn(nгн), а при достижении коэффициентом модуляции km, по крайней мере, одного преобразователя величины km=1 или (при повторном пуске с ненулевой скорости) при превышении частотой вращения ncp значения ncp≥n1·(nг/nгн)k6, значение УстId принимают равным УстId>Idmax, а значение коэффициента kn - равным kn=1, где: ncp и Icp - средние значения, соответственно, частот вращения и фазных токов электродвигателей; fs0, kfs, Iф0, kIф -коэффициенты, определенные по результатам предварительных расчетов из условия обеспечения минимума потерь мощности в электродвигателе при разгоне транспортного средства в режиме повышения напряжения при nг=nгн; k2, k3 и k5 - коэффициенты, учитывающие изменения значений fs1i, и УстIфi при отклонении текущего значения nг от значения nгн; Iфmax - расчетное максимальное значение фазного тока электродвигателя, соответствующее работе тягового электропривода при выполнении условий: nг=nгн и Рос=Pуст; Idmax - расчетное максимальное значение Id при nг=nгн; n1 - расчетное минимальное значение частоты вращения электродвигателя при nг=nгн, соответствующее режиму работы питающего его преобразователя с коэффициентом km=1; k4 и k6 - коэффициенты, учитывающие изменения значений параметров, соответственно, Icp и ncp, при которых изменяют законы изменения уставок регулируемых параметров при отклонении текущего значения nг от значения nгн при постоянных значениях параметров, соответственно, Iфmax и n1; Udn(nгн) - максимальное расчетное значение напряжения Ud в пусковом режиме при nг=nгн; а0, …, am - коэффициенты полинома m-й степени, рассчитанные из условия потребления из звена постоянного тока с расчетным значением напряжения Udp=Udmax(nг)/Kp электродвигателем, имеющим номинальные значения паспортных параметров, значения мощности Pdдв=Pd(nг)/mдв, где Кр -коэффициент, определяемый возможным отклонением реальных параметров электродвигателей от номинальных (Кр=1,05÷1,1).
Кроме того, ограничение значений скольжений fsi, обеспечиваемое в соответствии с предлагаемым способом, на уровне fsi≤fsmax, где fsmax - значение скольжения, максимально допустимое по критическому моменту при значении напряжения Ui=kcx·Udp, способствует повышению надежности электродвигателей.
При регулировании предлагаемым способом многодвигательного тягового электропривода в диапазоне, где Рос≥Pуст и Udn(nг)<Ud<Udp(nг), дополнительная коррекция скольжений fs1i и токовых уставок УстIdi электродвигателей в зависимости от отношения частоты вращения электродвигателя ni к средней частоте вращения электродвигателей ncp в соответствии с формулами: fs1ki=fs1i·(ni/ncp)k7 и Idi=Pуст·(nг/nгн)2·kl/Ud/mдв·(ni/ncp)k7, где k7 - коэффициент, рассчитанный из условия обеспечения выравнивания тяговых усилий активных колес транспортного средства при его движении на повороте со значениями коэффициентов модуляции преобразователей km1=km2=1, способствует обеспечению указанного выравнивания при работе электропривода во всем указанном диапазоне изменения параметра Ud.
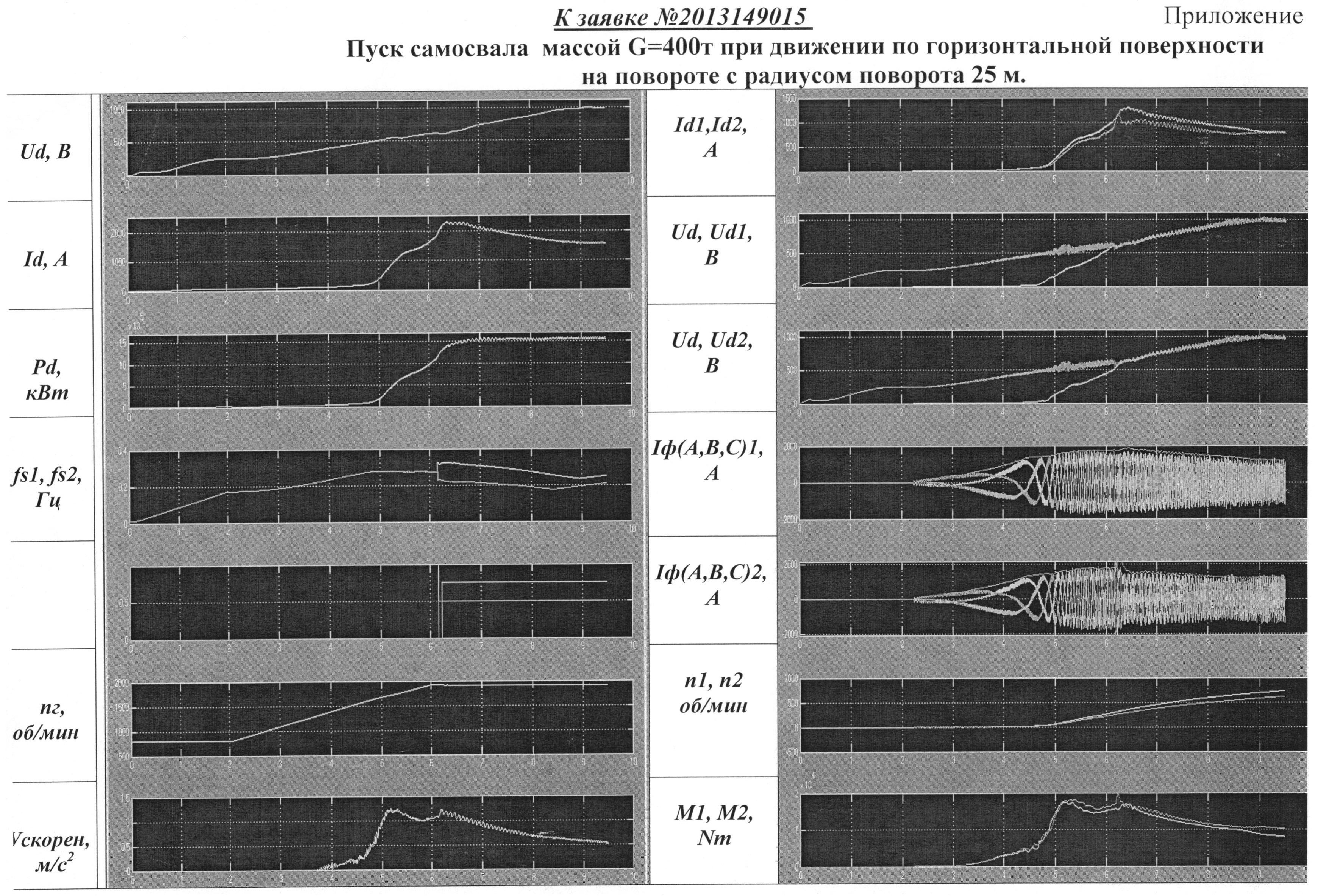
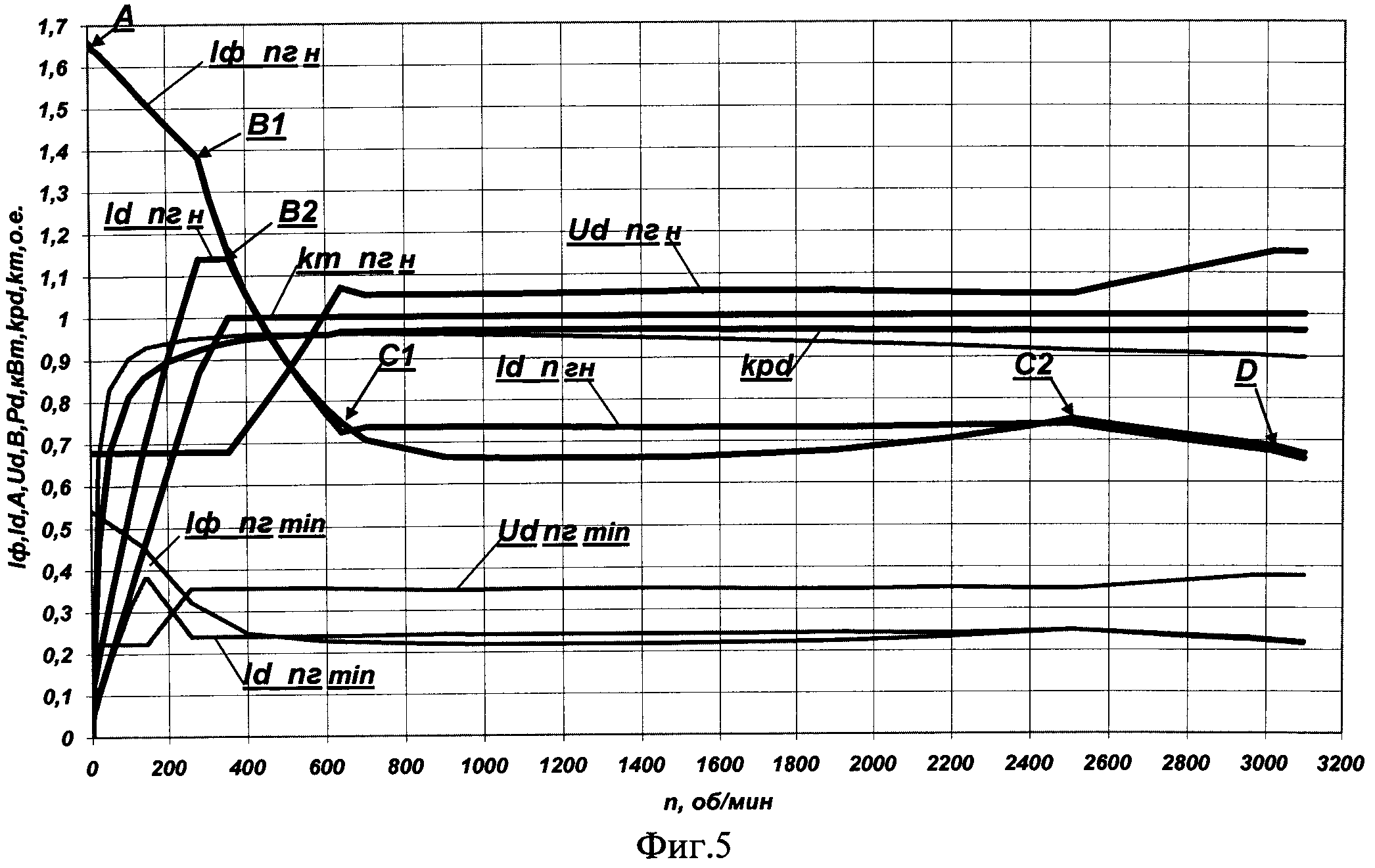
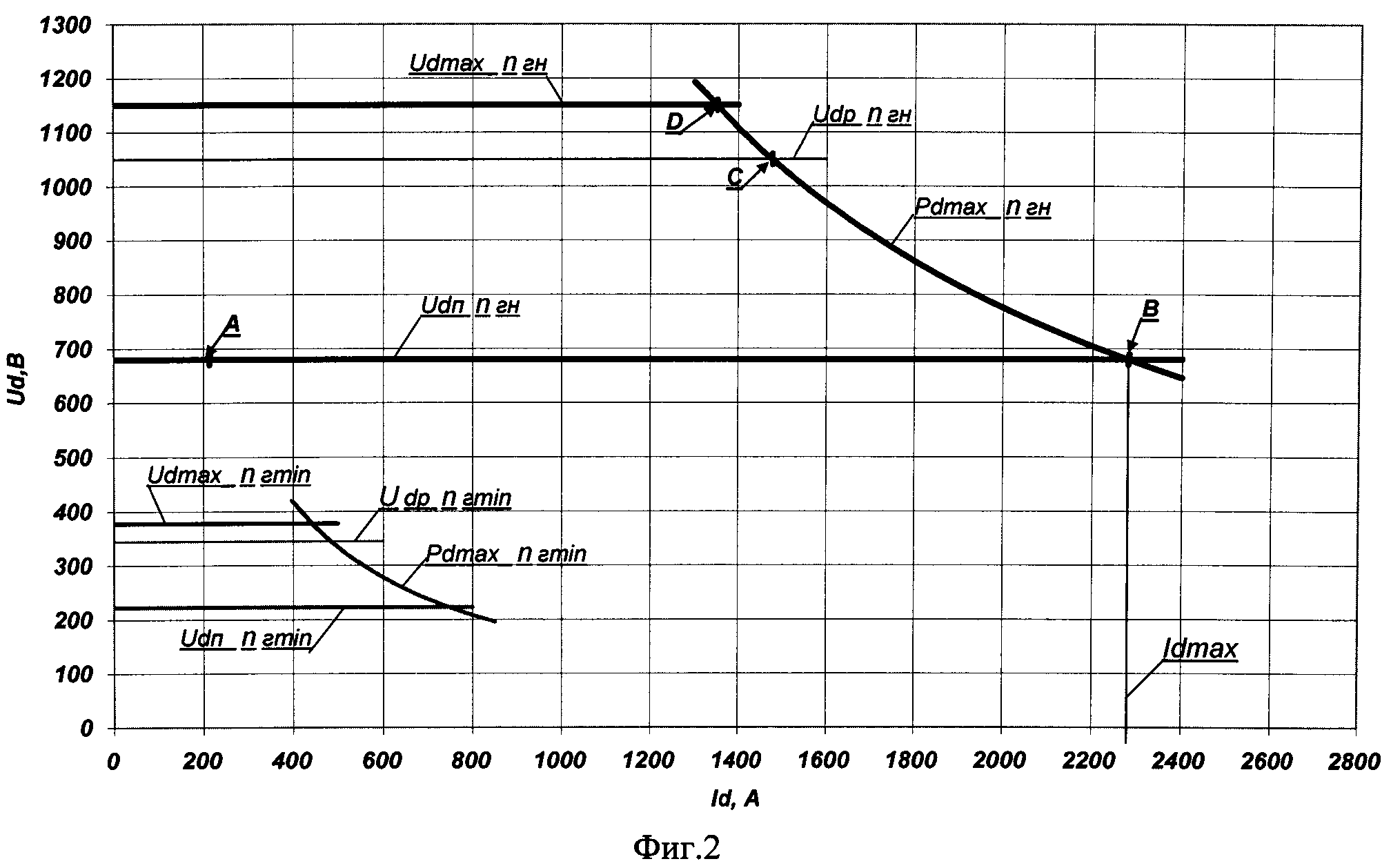
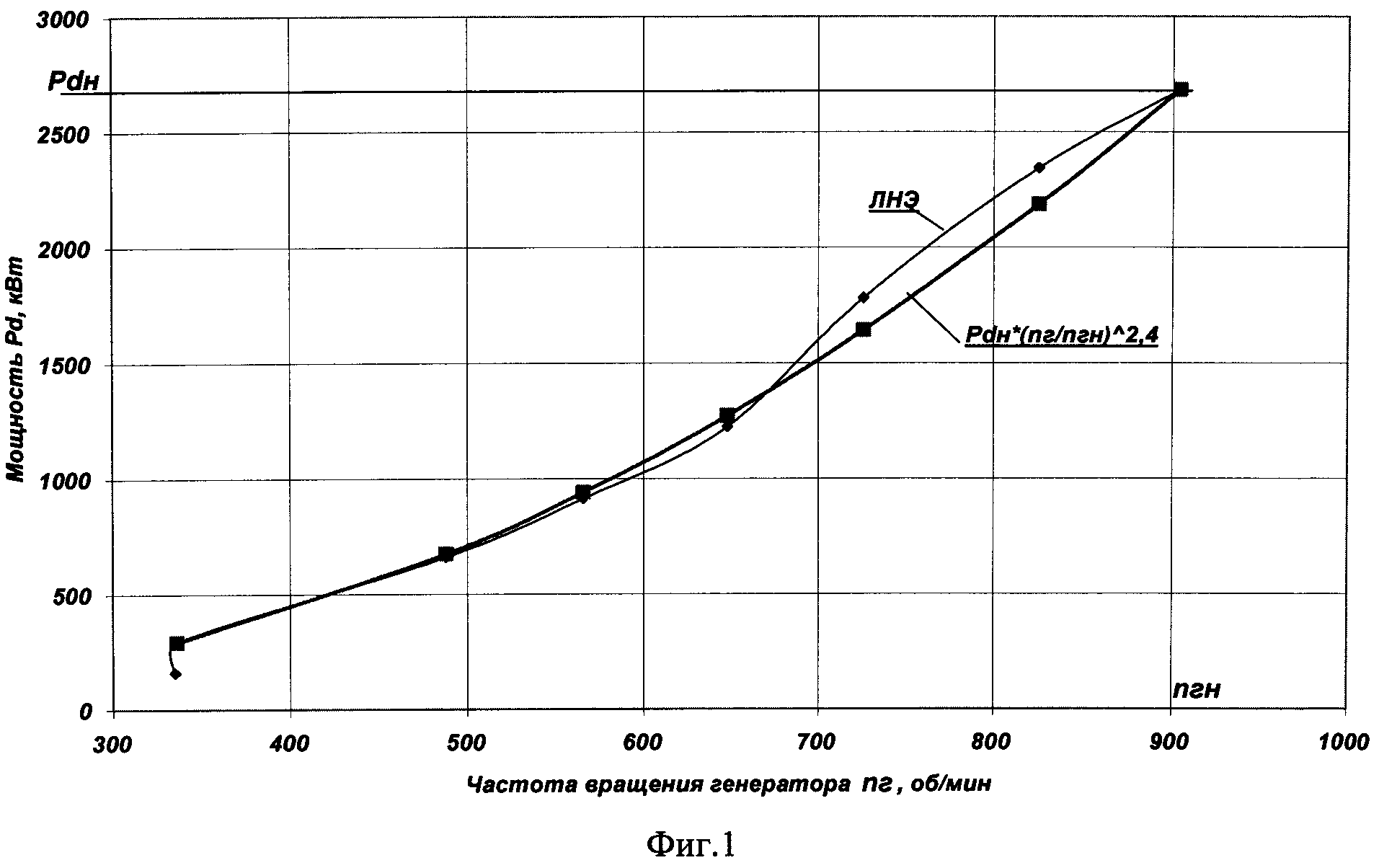
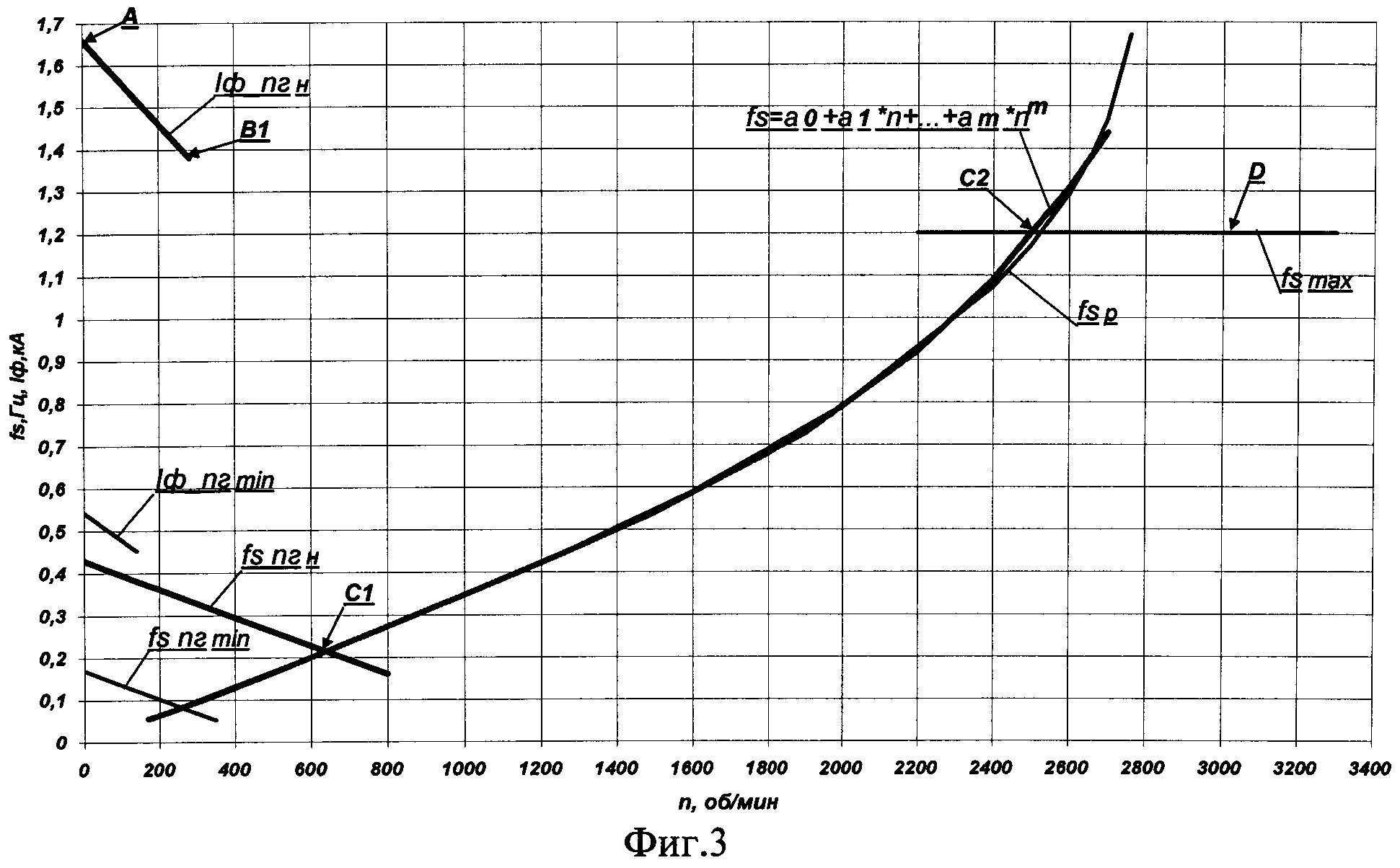
Предложенный способ иллюстрируют фиг. 1-7. На фиг. 1 представлена зависимость Pd(nг), обеспечивающая работу дизельного двигателя 710G3B по ЛНЭ (В.А. Азаренко и др. Тепловоз ТЭРА1: Результаты тяговых и теплотехнических испытаний. Журнал «Локомотив», 2002, №12, с. 29-31), и зависимость Рd=Рdн·(nг/nгн)2,4, которая может быть обеспечена предлагаемым способом при k1=l,2; на фиг. 2 - зависимости Ud(Id) электропривода большегрузного самосвала, обеспечиваемые предлагаемым способом при номинальном nгн и минимальном nгmin значениях частоты вращения генератора; на фиг. 3 - зависимости абсолютного скольжения fsi(ni) и фазного тока Iфi(ni) электродвигателя при nг=nгн и nг=nгmin, обеспечивающие его оптимальное регулирование; на фиг. 4 - блок-схема устройства, реализующего предлагаемый способ регулирования; на фиг. 5 - зависимости параметров электропривода от частоты вращения электродвигателя, реализуемые при регулировании предлагаемым способом при nг=nгн и nг=nгmin; на фиг. 6 - зависимости моментов электродвигателей от их частот вращения при nг=nгн и nг=nгmin; на фиг. 7 - зависимости выпрямленного напряжения от частоты вращения электродвигателей Ud(nг), реализуемые при регулировании предлагаемым способом при nг=nгн и различных значениях температуры обмотки ротора электродвигателя.
Указанное ограничение мощности, потребляемой генератором, обеспечивается при задании постоянного значения уставки мощности Руст изменением значений обратных связей по напряжению Uoc и току Iос в зависимости от выпрямленного напряжения Ud, тока Id выпрямителя и частоты вращения генератора nг в соответствии с формулами:


При настройке системы регулирования таким образом, чтобы в номинальном режиме произведение Uoc·Ioc=Poc было равно значению требуемой мощности на выходе выпрямителя Poc=Pdн, мощность Pd на выходе выпрямителя с учетом (1) и (2) равна:

Такая зависимость Pd(nг) обеспечивает изменение мощности, потребляемой от ДВС, по линии, близкой к ЛНЭ, что подтверждается зависимостями, представленными на фиг. 1.
Кроме того, для обеспечения надежной работы преобразователей значение напряжения Ud должно быть ограничено значением Udmax, определяемым классом примененных полупроводниковых приборов. Для обеспечения возможности указанного ограничения Udmax(nг) при использовании одного канала регулирования с постоянным значением уставки регулируемого параметра сигнал Рос нормируют таким образом, чтобы при nг=nгн и максимально допустимых значениях Pdmax и Udmax обеспечивалось равенство Рос=Uoc=Pуст. Этим достигается возможность ограничения параметров Pd(nг) и Ud(nг) на уровнях, при которых максимальный из указанных (Рос или Uoc) параметров становится равным уставке Pуст.
Кроме указанного ограничения максимального значения Udmax(nг), при регулировании предлагаемым способом предусмотрено ограничение значения напряжения в пусковом режиме Udn(nг)=Udmax(nг)/kn, что обеспечивается увеличением в этом режиме в kn раз значения сигнала Uoc. Такое ограничение напряжения способствует уменьшению максимальных значений токов возбуждения генератора, требуемых для реализации пусковых режимов, и, тем самым, повышению кпд и надежности тягового электропривода. Для представленных на фиг. 2 зависимостей Ud(Id), рассчитанных при nг=nгн и nг=nгmin в соответствии с предлагаемым способом применительно к тяговому электроприводу большегрузного автосамосвала, использующего синхронный генератор СТГ-1550-8У2, указанные параметры равны Udmax(nг)=1150·(nг/nгн)l,2 B; Pdmax(nгн)=1550·(nг/nгн)2,4 кВт; при значениях km1<1 и km2<1 kn=1,47.
Предлагаемый способ регулирования электродвигателей основан на результатах анализа их статических характеристик и режимов работы. Он позволяет, благодаря свойству статической устойчивости и малым величинам электромагнитных постоянных времени асинхронной машины, ограничиться регулированием модулей электромагнитных переменных в отличие от существенно более сложных систем, оперирующих их активными и реактивными составляющими. (В.Л. Грузов. Управление электроприводами с вентильными преобразователями. Вологда, 2003, с. 137). При этом регулирование каждого электродвигателя осуществляется посредством соответствующей системы, имеющей два независимых канала управления: канал регулирования амплитуд фазных токов и канал задания частоты питающего его напряжения. Каждый из этих каналов управляется заданием предварительно рассчитанных параметров (тока и абсолютного скольжения), обеспечивающих работу электродвигателя в оптимальных режимах. При этом уставки регулируемых параметров i-го электродвигателя задают в функции текущих значений его частоты вращения n и частоты вращения генератора nг.
Регулирование тяговых электродвигателей предлагаемым способом в пусковом режиме осуществляется заданием определенных значений абсолютных скольжений и ШИМ-регулированием напряжений электродвигателей в функции сигналов рассогласований между сигналами уставок токов электродвигателей и соответствующих сигналов обратных связей. После исчерпания возможности повышения напряжений ШИМ-регулированием дальнейшее повышение напряжений электродвигателей осуществляется только за счет изменения nг и тока возбуждения генератора.
Задаваемые в пусковом режиме значения уставок фазных токов УстIфi электродвигателей и частот fi питающих их напряжений fi=p·ni/60+fsi определяются по результатам предварительных расчетов из условия обеспечения минимума потерь мощности в электродвигателе при реализации требуемой зависимости момента Мi электродвигателя от ni. При этом значения моментов Mi электродвигателей при уменьшении их частот вращения ni не постоянны, как это обычно принимают для тепловозных электроприводов, а увеличиваются, что способствует, при применении этого способа в тяговых электроприводах пневмоколесных машин, более эффективному использованию их сцепных свойств при трогании (Я.Х. Закин. Прикладная теория движения автопоезда. М, «Транспорт», 1967, с. 125).
Представленные на фиг. 3 зависимости скольжения fs и фазного тока Iф от частоты вращения электродвигателя обеспечивают реализацию требуемых по ТЗ значений пусковых моментов на валу электродвигателя ТАД700 при nгн и nгmin и работе электродвигателя в режимах, оптимальных по кпд. Эти зависимости рассчитаны на основе паспортных данных электродвигателя с учетом насыщения магнитной цепи и потерь мощности в стали, которые приняты изменяющимися пропорционально  и
и  , где Фi - магитный поток электродвигателя (И.С. Ефремов и др. Теория и расчет тягового привода электромобилей. М, «Высшая школа», 1984, с. 129).
, где Фi - магитный поток электродвигателя (И.С. Ефремов и др. Теория и расчет тягового привода электромобилей. М, «Высшая школа», 1984, с. 129).
Как следует из фиг. 3, зависимости fsi(ni) и Iфi(ni), обеспечивающие требуемые зависимости Mi(ni) при работе электродвигателей в оптимальных режимах при постоянных значениях nг, могут быть приняты линейными, а влияние изменения заданных значений моментов при работе ДВС на частичных характеристиках и, соответственно, при иных значениях nг может быть учтено введением дополнительных коэффициентов k2 и k3, значения которых зависят от степени изменения значений fsi(ni) и Iфi(ni) при отклонениях текущих значений nг от номинального nгн. С учетом этого рассматриваемые зависимости fsi(ni,nг) могут быть рассчитаны по формуле:

При выполнении условия Рос<Pуст или сразу после выполнения условия Iфcp≥Iфmax·(nг/nгн)k4, где k4 - коэффициент, учитывающий отклонение значения среднего тока электродвигателей Iфср, при котором должен быть обеспечен переход в режим регулирования фазных токов Iфi (при уменьшении скорости движения), в зависимости от отклонения текущего значения nг от его номинального значения nгн, уставки фазных токов могут быть рассчитаны по формуле:

В процессе разгона ШИМ-регулирование напряжения i-го электродвигателя с целью обеспечения значений тока Iфi в соответствии с (5) осуществляют до зоны ограничения мощности Pd(nг). В зоне ограничения мощности Pd(nг) ШИМ-регулирование осуществляют сигналом рассогласования между уставкой выпрямленного тока УстId=Pуст·(nг/nгн)2·k1/Ud/mдв и сигналом обратной связи по выпрямленному току i-го электродвигателя Idi. Таким образом, в этом режиме регулирования выпрямленное значение тока электродвигателя определяются выражением:

Для обеспечения оптимальности регулирования электродвигателя значение скольжения fsi i-го электродвигателя задают, как и в ранее рассмотренном режиме, в соответствии с (4).
После достижения скорости, при которой коэффициенты модуляции kmi преобразователей достигают значения 1, дальнейшее повышение напряжений электродвигателей обеспечивают за счет повышения значения Ud посредством регулирования тока возбуждения генератора. При этом, как показывают расчеты, задание скольжения в соответствии с (4) при прямолинейном движении транспортного средства обеспечивает и в этом режиме значения потерь мощности в электродвигателе, близкие к минимально возможным.
При достижении частотой вращения ni значения, при котором выполняется условие Ud=Udmax(nг)/Kp, значение параметра fs2i, задаваемого в соответствии с полиномом:

становится равным значению fs1i, рассчитанного в соответствии с (4). При дальнейшем повышении частоты вращения электродвигателя и задании значения fsi равным максимальному из значений, рассчитанных в соответствии с (4) или (7), задаваемое значение этого параметра определяется полиномом (7).
Регулирование по (7) обеспечивает идентичные (по соотношениям напряжений и токов) режимы работы электродвигателей, в которых изменение напряжений на их выводах пропорционально (nг/nгн)k1 приводит к изменению подводимых к ним мощностей пропорционально (nг/nгн)2·k1. Из этого следует, что при регулировании предлагаемым способом изменение параметра nг не влияет на зависимость (7) и она может быть применима для регулирования электродвигателя с номинальными значениями паспортных параметров и расчетным напряжением на его выводах Udp=Udmax(nг)/Kp при изменении его мощности во всем рабочем диапазоне. С другой стороны, из этого следует, что при использовании электродвигателей с реальными расхождениями их характеристик регулирование суммарного значения потребляемой ими мощности Pd(nг) в соответствии с предлагаемым способом и значении коэффициента Кр, принятом с некоторым запасом, Кр≥(1,05÷1,1), напряжение Ud не достигает максимально допустимого значения Udmax(nг). Достижение значения Udmax при этом возможно лишь при достаточно высокой скорости движения и достаточно малом значении Id (например, при снижении нагрузки электродвигателя вследствие изменения условий движения и неизменном значении nг), или в случае ограничения параметра fs (на высоких скоростях) для исключения возможности работы электродвигателя со значениями скольжений, большими значения fskp, соответствующего критическому моменту Мкр. Это ограничение может быть задано регулируемым, например в функции температуры обмоток электродвигателей, или постоянным (с определенным запасом) значением параметра fsmax.
При регулирования параметров fsi и Iфi в соответствии с (4) и (5) в тяговом электроприводе, содержащем несколько (mдв≥2) электродвигателей, приводящих активные колеса разных бортов пневмоколесного транспортного средства, при его движении на повороте на малых скоростях разность частот вращения колес разных бортов приводит к разности суммарных тяговых усилий колес разных бортов и, соответственно, к появлению в плоскости дороги момента, препятствующего повороту, что, в свою очередь, приводит к увеличению сопротивления движению и, соответственно, к увеличению износа пневмошин и уменьшению кпд тягового привода.
Исключение этого нежелательного свойства на малых скоростях (при Ud=Udn) может быть достигнуто исключением влияния разности частот вращения электродвигателей на разность реализуемых ими моментов. Это может быть обеспечено, если параметры fsi и Ii регулировать в зависимости не от соответствующего значения ni, как это показано в (4) и (5), а от среднего значения частот вращения ncp электродвигателей:

При движении на средних скоростях (в диапазоне изменения напряжения Udn≤Ud<Udp) уменьшению проявления аналогичного нежелательного свойства при движении на повороте способствует дополнительная коррекция значений уставок скольжений и токов в соответствии с формулами:

Таким образом, при регулировании предлагаемым способом обеспечение работы ДВС в режимах наибольшей экономичности достигается за счет формирования обратных связей по напряжению в звене постоянного тока и по току, потребляемому из него, в соответствии с (1) и (2), выравнивание тяговых усилий активных колес на малых скоростях обеспечивается заданием скольжений в соответствии с (8) и регулированием токов, потребляемых каждым электродвигателем, в соответствии с (9), на средних скоростях - заданием скольжений в соответствии с (10) и регулированием токов в соответствии с (11), а на высоких скоростях - заданием скольжений в соответствии с (7).
При повышении скорости и, в соответствии с (8), - значения fs, ограничение этого параметра на уровне fsmax исключает возможность работы электродвигателей со значениями скольжения, большими значения, соответствующего критическому моменту Мкр.
Из изложенного следует, что при регулировании предлагаемым способом технический эффект достигают за счет того, что регулирование генератора осуществляют формированием сигналов обратных связей по напряжению Uoc(nг) и току Iос(nг), обратно пропорциональных частоте вращения генератора, а регулирование электродвигателей - заданием их регулируемых параметров в соответствии с предварительно рассчитанными зависимостями этих параметров от частот вращения соответствующих электродвигателей и частоты вращения генератора.
Следует отметить, что улучшению качества и уменьшению времени переходных процессов ДВС при изменении, посредством изменения положения педали газа, задания величины реализуемой им мощности, способствует введение ограничения максимально допустимого темпа изменения сигнала nг.
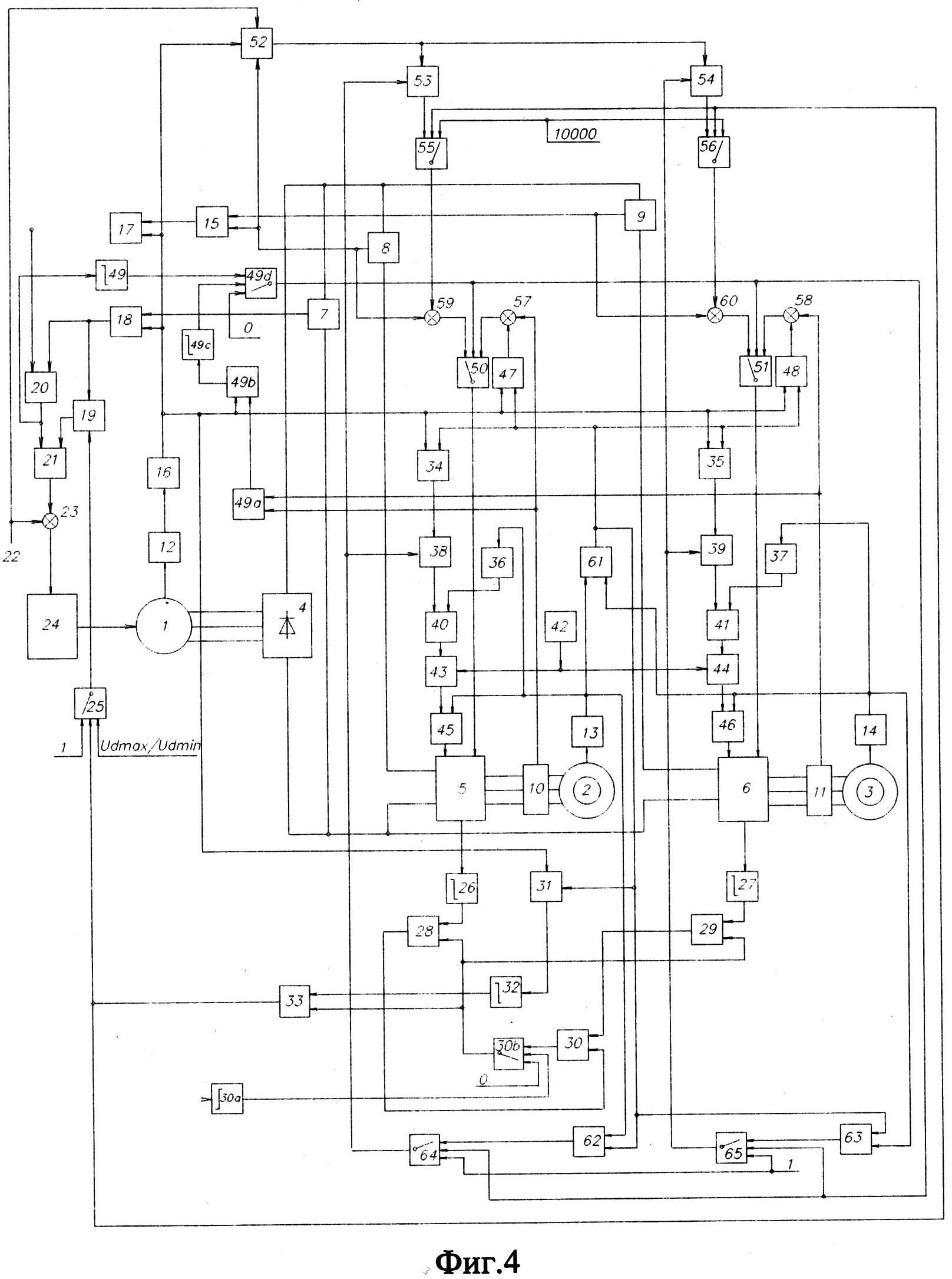
Функциональная блок-схема реализации предлагаемого способа для автономного двухдвигательного асинхронного тягового электропривода представлена на фиг. 4. Она содержит генератор 1 переменного тока, питающий асинхронные короткозамкнутые электродвигатели 2 и 3 посредством выпрямителя 4 и соответствующих преобразователей напряжения 5 и 6, каждый из которых снабжен двумя входами задания, соответственно, частоты и амплитуды напряжения, формируемого этим преобразователем, а также выходом, информирующим о текущем значении коэффициента модуляции kmi. На выходе выпрямителя 4 установлен датчик 7 напряжения Ud, во входных цепях питания преобразователей 5 и 6 установлены датчики 8 и 9 выпрямленных токов, соответственно Id1 и Id2, a во входных цепях электродвигателей 2 и 3 - датчики 10 и 11 фазных токов, соответственно Iф1 и Iф2. Генератор 1 снабжен датчиком 12 частоты nг вращения генератора, а электрдвигатели 2 и 3 - датчиками 13 и 14 частот вращения.
Система регулирования напряжения генератора 1 включает в себя сумматор токов 15, блок 16 ограничения темпа изменения сигнала обратной связи по nг, функциональные блоки 17 и 18, в каждом из которых выходные сигналы блоков 15 и 7 умножаются в соответствии с (1) и (2) на коэффициент (nгн/nг)k1, множительные блоки 19 и 20, в первом из которых задается коэффициент обратной связи по напряжению, во втором - выполняется расчет параметра Рос, блок 21 выделения максимального сигнала, блок 22 задания сигнала уставки Pуст, сумматор 23 и регулятор 24 напряжения генератора 1. Значение сомножителя (1 или Udmaxн/Udnн=1,47), на который в блоке 19 умножается сигнал, пропорциональный напряжению Ud, определяется состоянием переключателя 25, управляемого сигналом с выхода системы блоков 26-33, 30a и 30b, обеспечивающей нулевое значение на выходе блока 33 при значениях коэффициентов модуляции km1<1, km2<1 или при nср<n1·(nгн/nг)k6, а также сразу после выполнения условия Ioc≥Idmax·(nгн/nг)k1, а при достижении каким-либо из коэффициентов модуляции значения «1», а также в случае повторного пуска при ni·(nгн/nг)k6≥n1 - единичное значение на выходе блока 35. Эта система блоков включает в себя компораторы 26 и 27, входы которых соединены с выходами преобразователей 5 и 6, сигнализирующими о значениях коэффициентов km соответствующих преобразователей, блоки 28-30 и 33 выделения максимальных сигналов, переключатель 30b (состояния всех указанных в блок-схеме переключателей соответствуют их состояниям при подаче на их управляющие входы единичных сигналов), состояние которого определяется величиной сигнала на выходе компоратора 30a, вход которого соединен с выходом блока 17, рассчитывающего величину Iос в соответствии с (2), а также функциональный блок 31, в котором рассчитываются значения ncp·(nгн/nг)k6 и компоратор 32. Часть блок-схемы, соответствующая регулированию электродвигателей, включает в себя блоки 34-37 расчета абсолютных скольжений: 34 и 35 - в соответствии с (8), блоки 36 и 37 - в соответствии с (7), 38 и 39 - блоки расчета скорректированных значений fski в соответствии с (10), 40 и 41 - блоки выделения максимальных сигналов, 42 - блок задания максимально допустимого значения скольжения, 43 и 44 - блоки выделения минимальных сигналов, 45 и 46 - блоки расчета частот f1 и f2 напряжений, формируемых преобразователями 5 и 6 в соответствии с формулой: fi=p·ni/60+fsi, 47 и 48 - блоки расчета уставок фазных токов Iф1 и Iф2 электродвигателей в соответствии с (9), система блоков, включающая в себя компоратор 49, блок расчета среднего значения фазных токов 49а, блок 49b расчета значения тока, нормированного в соответствии с Iсрн/Icp/(nг/nн)k4, компоратор 49 с и переключатель 49d, посредством которой обеспечивается формирование сигналов на управляющих входах переключателей 50 и 51, блок 52, в котором рассчитывается значение УстId=Pуст·(nг/nн)2·kl/Ud/mдв, множительные блоки 53 и 54 коррекции уставок выпрямленных токов в соответствии с (11), переключатели 55 и 56, сумматоры 57-60, блок 61 расчета среднего значения частот вращения электродвигателей, блоки 62 и 63 расчета значений (ni/ncp)k7, переключатели 64 и 65, выходы которых соединены с корректирующими входами множительных блоков 53 и 54.
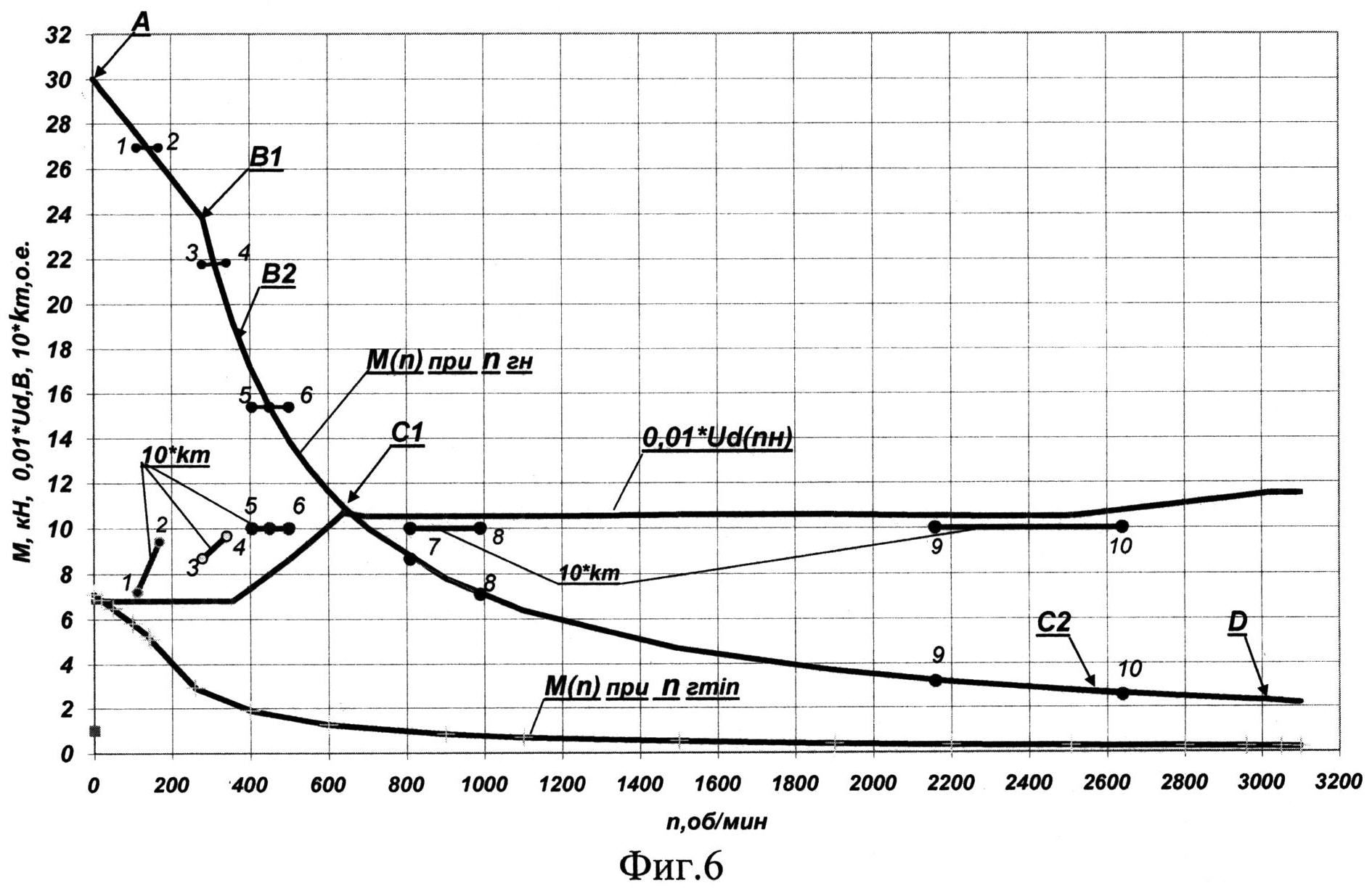
На фиг. 5 и 6 представлены графические зависимости регулируемых параметров электропривода от частоты вращения электродвигателя, соответствующие двум режимам работы электропривода: при nг=nгн и при nг=nгmin, рассчитанные при паспортных значениях параметров электродвигателей. Кроме того, на фиг. 6 представлены зависимости М(n), иллюстрирующие выравнивание, при движении на повороте, моментов электродвигателей в режиме пуска и их мощностей - в режиме ограничения мощности.
Для исключения влияния расхождений частот вращения электродвигателей и их характеристик при совместной работе в составе электропривода на изменение режимов работы электродвигателей, регулирование в соответствии с предлагаемым способом сначала рассмотрено для электропривода с паспортными значениями параметров электродвигателей и радиусов качения ведущих колес транспортного средства при его прямолинейном движении с начальной нулевой скоростью и номинальном значении частоты вращения генератора nгн.
После включения блока 22 на входе блока 23 появляетс, с определенным темпом нарастания сигнал Pуст. При этом работой блоков 7-24 системы возбуждения генератора обеспечивается повышение напряжения Ud в звене постоянного тока. При невключенных блоках 45 и 46 сигналы с выходов датчиков токов 13 и 14 имеют нулевые значения, поэтому токовый канал регулирования системы возбуждения генератора (блоки 8, 9, 15, 17 и 20) не работает, а работа канала, включающего в себя блоки 7, 18-24, обеспечивает значение напряжения Ud=Udn(nгн)=680 B с требуемым для этого коэффициентом обратной связи по напряжению, что обеспечивается состояниями блоков 28-33 в соответствии с информацией, полученной из блоков 26 и 27.
При включении (через определенное время после включения блока 22) блоков 45 и 46 узлы регулирования частот (блоки 34-46) и напряжений (блоки 10, 11, 50, 51, 57 и 58) обеспечивают в соответствии с (8) и (9) работу электродвигателей в т. А (см. фиг. 3-5). При этом, если моменты Мсi сопротивления на валах электродвигателей меньше, чем момент в т. А (см. фиг. 6), транспортное средство разгоняется с ускорением, пропорциональным разности указанных моментов. Параметры электропривода, представленные на фиг. 2, изменяют свои значения по линии А-В, а на фиг. 3, 5 и 6 - по линиям А-В1.
При разгоне транспортного средства и соответствующем повышении мощности, потребляемой электродвигателями, повышается значение сигнала на выходе блока 20 расчета параметра Рос. При выполнении условия Рос>Руст на выходе компоратора 49 проявляется «1», что при Iос<Imax приводит к появлению «1» на выходе переключателя 49d и, соответственно, на входах к переключателей 50 и 51. При этом регулирование напряжений соответствующих преобразователей переключают в режим регулирования рассогласованием между уставкой выпрямленных токов (выходы блоков 59 и 60) и соответствующими обратными связями Idi (выходы блоков 8 и 9). В результате дальнейшее регулирование электродвигателей выполняется при задании параметров fsi в соответствии с (10), а уставок токов - в соответствии с (11). При дальнейшем повышении скорости параметры электропривода на фиг. 5 и 6 изменяются по линиям В1-В2, а на фиг. 2 это соответствует работе в точке В. При работе в этой точке значения сигналов на обоих входах блока 21 одинаковы.
При достижении частотой вращения по крайней мере одного электродвигателя значения n1, при котором, в соответствии с предварительным расчетом коэффициент модуляции питающего его преобразователя становится равным 1, и появлении соответствующего сигнала на выходе блоков 26 или 27 и, следовательно, на выходах блоков 28, 29 и 33, что приводит к изменению состояния переключателя 25 и, тем самым, к изменению значения сомножителя, на который умножают значение Uoc в блоке 19, с «1,47» на «1». Кроме того, появление «1» на выходе блока 33 приводит к переключению блоков 55 и 56 в состояния, обеспечивающие на входах блоков 59 и 60 значения уставок УстIdi>Idmax (например, заведомо недостижимое значение 10000). Благодаря переключению блока 25 устраняется ранее действующее ограничение параметра Ud на уровне 680 В, после чего регулирование осуществляется только с использованием рассчитываемого в блоке 20 сигнала Рос обратной связи по мощности, причем, благодаря переключению блоков 55 и 56, обеспечивающих последующую работу преобразователей со значениями коэффициентов модуляции km1=km2=1 посредством регулирования только тока возбуждения генератора. Задание скольжений fsi при этом обеспечивается, как и ранее, в соответствии с (11).
При уменьшении параметра Id и, соответственно, Iос, например, вследствие уменьшения ускорения транспортного средства, система регулирования генератора повышает напряжение Ud в соответствии с тем, что Uoc=Pуст/Ioc. Параметры электропривода на фиг. 2 при этом изменяются по линии В-С, на фиг. 5 и 6 - по линиям В2-C1.
После достижения скорости транспортного средства, соответствующей точкам С (на фиг. 2) и C1 (на фиг. 5 и 6), значения сигналов на выходах блоков 36 и 37 становятся больше значений сигналов на выходах блоков 38 и 39, в результате чего регулирование параметров fs1 и fs2 осуществляется в соответствии с (7), что обеспечивает работу электропривода в режиме с заданным ограничением мощности Pd=1550 кВт при постоянном значении напряжения Udp_nгн=1050 B. Параметры электропривода в этом режиме на фиг. 2 соответствуют точке С, на фиг. 3, 5 и 6 - линиям C1-С2.
После достижения скорости, соответствующей ограничению по параметру fsmax (точка С2 на фиг. 3), сигнал на выходе блока 42 становится меньше сигналов на выходах блоков 40 и 41, в результате чего дальнейший разгон транспортного средства осуществляется при постоянных значениях скольжений fs1=fs2=fsmax и изменении параметров электропривода на фиг. 2 по линии С-D, а на фиг. 5 и 6 - по линии С2-D.
При повышении напряжения Ud до значения Udmax_nгн=1150 B (т. D) и дальнейшем повышении скорости транспортного средства (при условии превышения суммарного тягового усилия колес над сопротивлением движению) значения тока Id и, соответственно, мощности Pd уменьшаются.
Описанные процессы изменения параметров электропривода характерны для разгона транспортного средства по горизонтальной поверхности. При этом предполагалось, что ускорение постоянно уменьшалось из-за уменьшения разности между силой тяги, развиваемой колесами транспортного средства, и сопротивлением движению. При правильно спроектированном электроприводе последний должен обеспечивать реализацию максимальной мощности ДВС при требуемой по ТЗ максимальной скорости транспортного средства.
При существенном увеличении сопротивления движению, например, вследствие движения на подъем частоты вращения электродвигателей уменьшаются и, соответственно, изменяются значения параметров, представленных на фиг. 5, а именно: в диапазоне D-С2 уменьшается напряжение Ud при постоянных значениях fs1=fs2=fsmax, в диапазоне С2-С1 скольжения рассчитывается в соответствии с (7), а напряжение Ud и ток Id постоянны, в диапазоне С1-В2 скольжение рассчитывается в соответствии с (10), напряжение Ud уменьшается, а ток Id увеличивается. При этом соответственно увеличивается и значение параметра Iос. При выполнении условия Ioc≥Idmax на выходе компоратора 30a появляется «1», благодаря чему на выходе блока 30b и, соответственно, на одном из входов блока 33 появляется нулевой сигнал. Если при этом выполняется условие n1=n2<n1·(nг/nгн)k6, то наличие на выходе компоратора 32 и, соответственно, на втором входе блока 33 тоже нулевого сигнала приводит к изменению выходного сигнала блока 33 и, соответственно, к изменению состояний переключателей 25, 55 и 56 и тем самым - к переходу в режим регулирования в диапазоне В2-В1.
В диапазоне В2-В1 напряжение Ud и ток Id постоянны, а значения фазных токов и, соответственно, сигналов на выходах блоков 49а и 49b, увеличиваются. При выполнении условия Iср≥Iфmax·(nгн/nг)k4 изменяется значение выходного сигнала компоратора 49с, что приводит изменению состояния переключателя 49d, появлению нулевого сигнала на его выходе и, соответственно, к изменению состояний переключателей 50, 51 и переходу в режим регулирования в диапазоне В1-А при уставках скольжений и фазных токов, задаваемых в соответствии в соответствии с (8) и (9).
На фиг. 2, 3 и 5, 6 представлены также аналогичные зависимости параметров регулирования электродвигателей при nг=nгmin.
Следует отметить, что установившийся режим работы ДСВ, необходимым условием которого является равенство nд=const, практически возможен только при нажатой «до упора» педали газа. При движении в других режимах значение частоты вращения ДВС практически все время изменяется (в пусковом режиме - монотонно, при движении на частичных характеристиках - в зависимости от задаваемого водителем положения педали газа). Однако в любом случае темпы изменения параметра nг существенно медленнее (чему дополнительно способствует введение блока 16 ограничения темпа изменения сигнала nг) темпов изменения электрических параметров электропривода, что дает основания считать представленные на фиг. 5 и 6 взаимозависимости параметров электропривода, рассчитанные на основе статических характеристик электродвигателей, достаточно достоверными.
Влияние расхождений магнитных характеристик электродвигателей на расхождение их выходных характеристик несущественно вследствие эффекта самовыравнивания, обусловленного взаимосвязью тока намагничивания и тока статора электродвигателя.
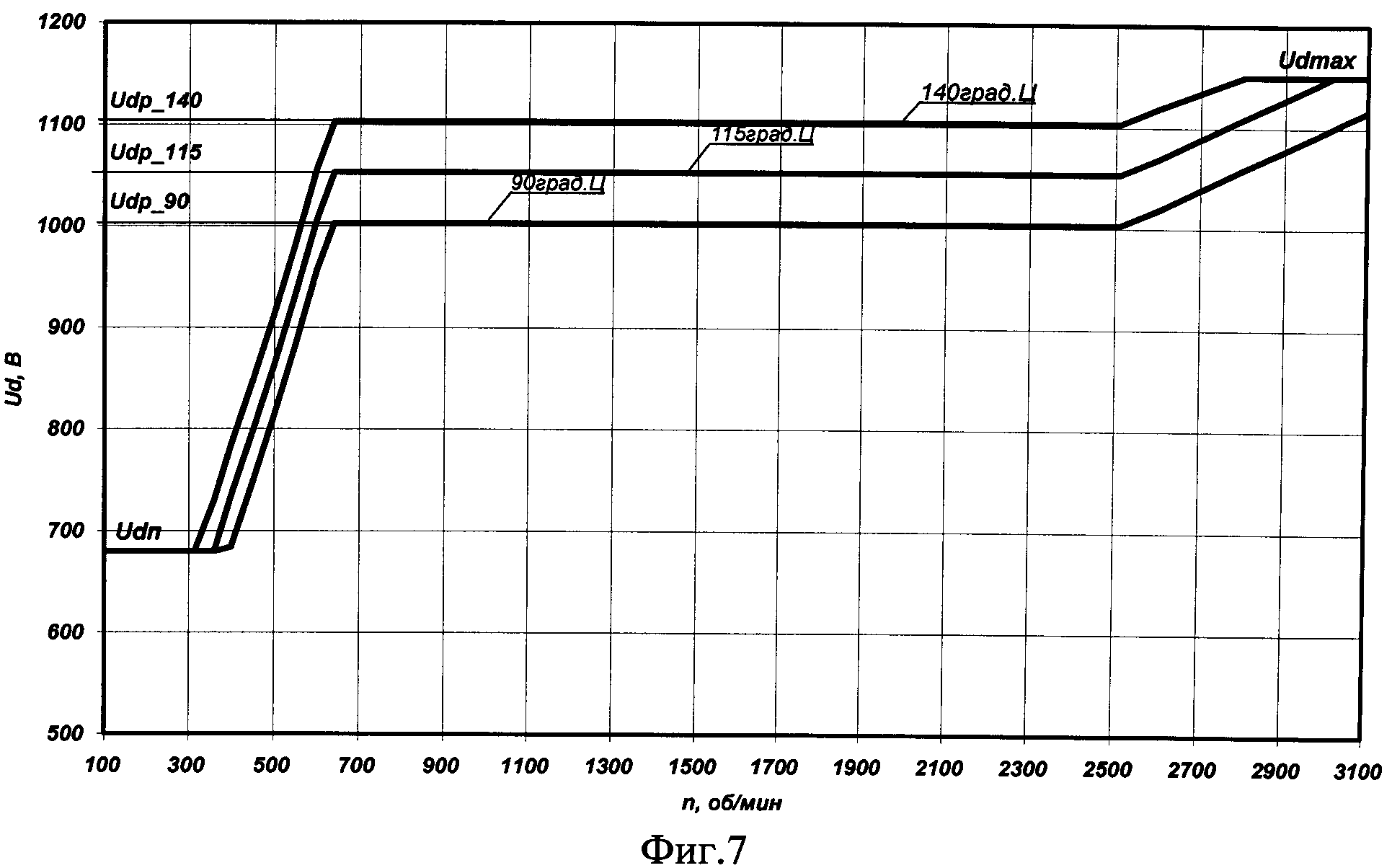
Наиболее существенным фактором, влияющим на изменение характеристик электродвигателей, является изменение температуры обмоток их роторов. При регулировании предлагаемым способом такое изменение приводит к изменению зависимости Udp(n). На фиг. 7 показаны зависимости Udp(n) при одинаковых изменениях температур обмоток роторов электродвигателей в диапазоне (90÷140)°C. В этом случае одновременное изменение температуры роторов приводит к соответствующему изменению значения Udp и, посредством системы регулирования генератора, обеспечивающей постоянное значение мощности, - к изменению суммарного значения выпрямленных токов Id1 и Id2, не влияющему при этом на перераспределение нагрузок между электродвигателями. При расхождении температур обмоток роторов электродвигателей расхождения их токовых нагрузок и мощностей при регулировании предлагаемым способом пропорциональны указанному расхождению температур.
При движении транспортного средства на повороте и появлении в связи с этим расхождения частот вращения электродвигателей колес разных бортов, регулирование электропривода предлагаемым способом обеспечивает в диапазоне А-В1-В2-С1 выравнивание моментов электродвигателей (точки 1, 2; 3, 4; 5, 6) на зависимости М(ni) соответствуют значениям моментов электродвигателей внутреннего и внешнего колес при движении на повороте, на зависимостях 10·km(ni) - значениям коэффициентов модуляции преобразователей при расхождениях частот вращения электродвигателей в указанных диапазонах. В диапазоне С1-D задание значений скольжений в соответствии с предлагаемым способом обеспечивает выравнивание мощностей электродвигателей (см. точки 7, 8; 9, 10).
Таким образом, предлагаемый способ регулирования тягового электропривода обеспечивает:
- работу ДВС в режимах, близких к режимам наибольшей экономичности во всем рабочем диапазоне изменения его частоты вращения;
- заданием скольжений fsi и регулированием токов Ii электродвигателей в соответствии с предлагаемым способом - минимум потерь мощности в электродвигателях;
- выравнивание тяговых усилий всех активных колес транспортного средства при прямолинейном движении, а на малых скоростях - и на поворотах, аналогичное распределению тяговых усилий в широко применяемом и хорошо зарекомендовавшем себя дифференциальном приводе, что способствует минимизации потерь мощности в пневмошинах и, тем самым, повышению кпд тягового электропривода и срока службы пневмошин.
Кроме того, регулирование предлагаемым способом, в отличие от прототипа, обеспечивает:
- стабилизацию напряжения Ud в пусковом режиме, что способствует уменьшению требуемого для реализации этого режима тока возбуждения генератора и, тем самым, повышению кпд и надежности генератора;
- прямое задание скольжений электродвигателей (без дополнительных контуров коррекции добавочных скольжений в функции напряжений на электродвигателях) во всем рабочем диапазоне, что способствует упрощению системы автоматического регулирования и повышению качества регулирования;
- ограничение максимального значения скольжения электродвигателей на уровне предельно допустимого по критическому моменту, что исключает возможность их работы вне зоны статической устойчивости и тем самым, способствует возможности применения высокоиспользуемых электродвигателей с лучшими массогабаритными показателями.
Способ управления тяговым электроприводом многоколесного транспортного средства и устройство для его осуществления
Патрон повышенной пробиваемости
Патрон повышенной пробиваемости
Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда
Способ снижения подводного шума судов и устройство для его осуществления
Блок рулевых приводов управляемого снаряда
Жидкий флюс для пайки ювелирных цепей из сплавов золота
Управляемый снаряд
Управляемый снаряд
Управляемый снаряд
Хвостовой отсек воздушно-динамических рулевых приводов для управляемых летательных аппаратов (преимущественно для управляемых авиационных бомб) и пневмодвигатель рулевого привода
Управляемая пуля

