Результат интеллектуальной деятельности: ПОДВОДНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ
Вид РИД
Изобретение
Изобретение относится к судостроению, в частности к подводным аппаратам повышенной маневренности, и может использоваться при возведении морских нефтегазодобывающих платформ с прокладкой трубопроводов на дне моря.
Известно подводное судно, содержащее корпус, внутри которого в продольной плоскости ниже ватерлинии размещена по крайней мере одна труба со сквозным каналом, в средней части которой установлена водяная турбина для обеспечения движения судна, связанная с силовой установкой, причем труба выполнена цилиндрического сечения, а в носовой и кормовой ее частях смонтированы шторки для герметического перекрытия канала трубы, причем судно снабжено средством для удаления воды из трубы при закрытых шторках для создания судну положительной плавучести (патент РФ №2095276, МПК B63G 8/00, 8/22, опубл. 10.11.1997 г.).
Недостатками аналога являются значительные затраты электрической энергии для работы силовой установки и отсутствие источника возобновляемой электрической энергии.
Известен подводный аппарат повышенной маневренности, содержащий обтекаемый корпус и движительный комплекс, включающий группу носовых поперечных движителей и группу из трех или четырех кормовых маршевых реверсивных движителей, причем в качестве маршевых движителей установлены реверсивные водометные движители, которые размещены в корпусе аппарата в его кормовой части, водометные трубы, входные и выходные патрубки движителей жестко закреплены в корпусе аппарата, при этом входные патрубки отогнуты от продольной оси аппарата на угол 20-50°, а выходные патрубки установлены под углом 0-25° к продольной оси аппарата (патент РФ №2101210, МПК B6G 8/00,8/08, опубл. 10.01.1998 г.).
Недостатками подводного аппарата повышенной маневренности являются значительные затраты электрической энергии для работы движительного комплекса и отсутствие источника возобновляемой электрической энергии.
По наибольшему количеству сходных признаков и достигаемому при использовании результату данное техническое решение выбрано в качестве прототипа заявляемого технического решения.
Предлагаемый подводный аппарат повышенной маневренности устраняет недостатки прототипа и позволяет снизить затраты электрической энергии на движительный комплекс и использовать кинетическую энергию воды в качестве источника возобновляемой электрической энергии.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в снижении потребляемой электрической энергии движительного комплекса и повышении маневренности аппарата.
Для достижения технического результата в подводном аппарате повышенной маневренности, содержащем обтекаемый корпус, движительный комплекс, водометные трубы с входными и выходными патрубками, причем он снабжен электрогенераторами, аккумуляторными батареями, направляющими экранами и вертикальным водозаборником, обтекаемый корпус имеет форму капли, движительный комплекс включает фронтальный, кормовой, левый, правый и центральный гидравлические движители, которые выполнены в виде пустотелой винтовой поверхности и установлены в зоне выходных патрубков водометных труб, а входные патрубки водометных труб размещены внутри вертикального водозаборника, электрогенераторы установлены на гидравлических движителях, направляющие экраны имеют форму круглой чаши и с зазором жестко крепятся к корпусу в зонах выходных патрубков водометных труб.
Кроме того, заявленное решение имеет факультативные признаки, характеризующие его частные случаи, а именно:
- гидравлические движители имеют прямоугольное поперечное сечение (стороны а и 2а), а стенки-лопасти закручены по длине на угол от 0 до 180°;
- направляющие экраны изготовлены из прочного гибкого пластика, не подверженного биообрастанию;
- корпус изготовлен из прочной нержавеющей стали.
Отличительными признаками предлагаемого изобретения являются то, что оно снабжено электрогенераторами, аккумуляторными батареями, направляющими экранами и вертикальным водозаборником, обтекаемый корпус имеет форму капли, движительный комплекс включает фронтальный, кормовой, левый, правый и центральный движители, которые выполнены в виде пустотелой винтовой поверхности и установлены в зоне выходных патрубков водометных труб, а входные патрубки водометных труб размещены внутри вертикального водозаборника, электрогенераторы установлены на гидравлических движителях, направляющие экраны имеют форму круглой чаши и с зазором жестко крепятся к корпусу в зонах выходных патрубков водометных труб.
Предлагаемый подводный аппарат повышенной маневренности иллюстрируется чертежами, представленными на фиг.1-4.
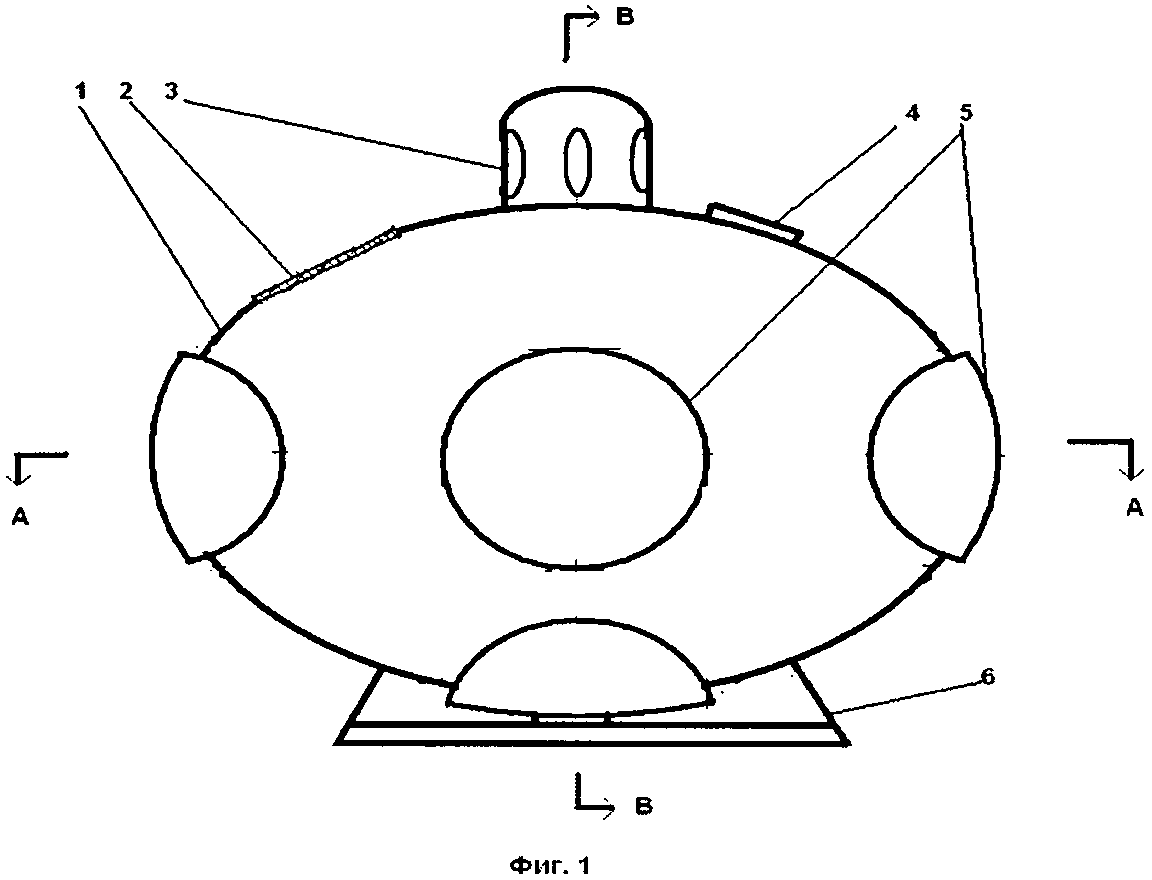
На фиг.1 показан общий вид подводного аппарата повышенной маневренности.
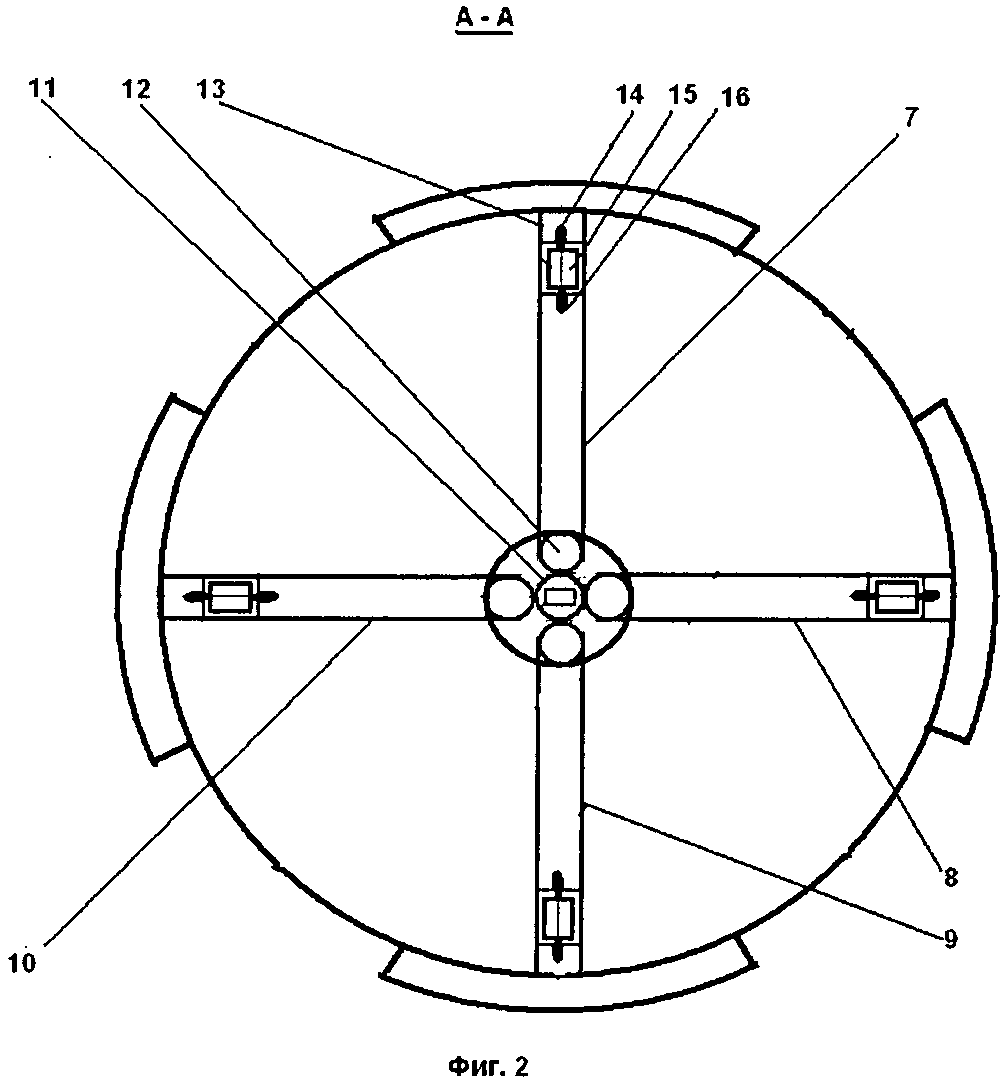
На фиг.2 - продольный разрез А-А подводного аппарата повышенной маневренности.
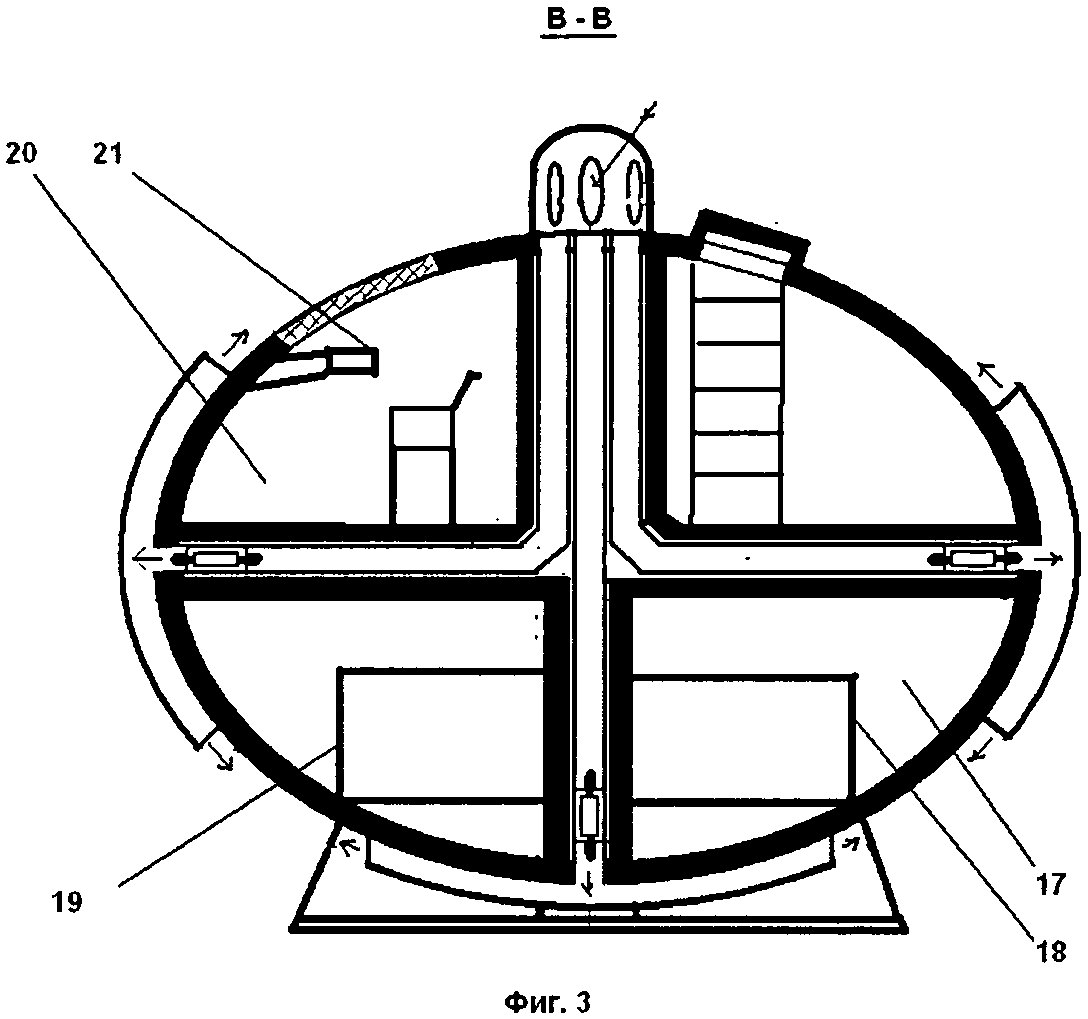
На фиг.3 - поперечный разрез В-В подводного аппарата повышенной маневренности.
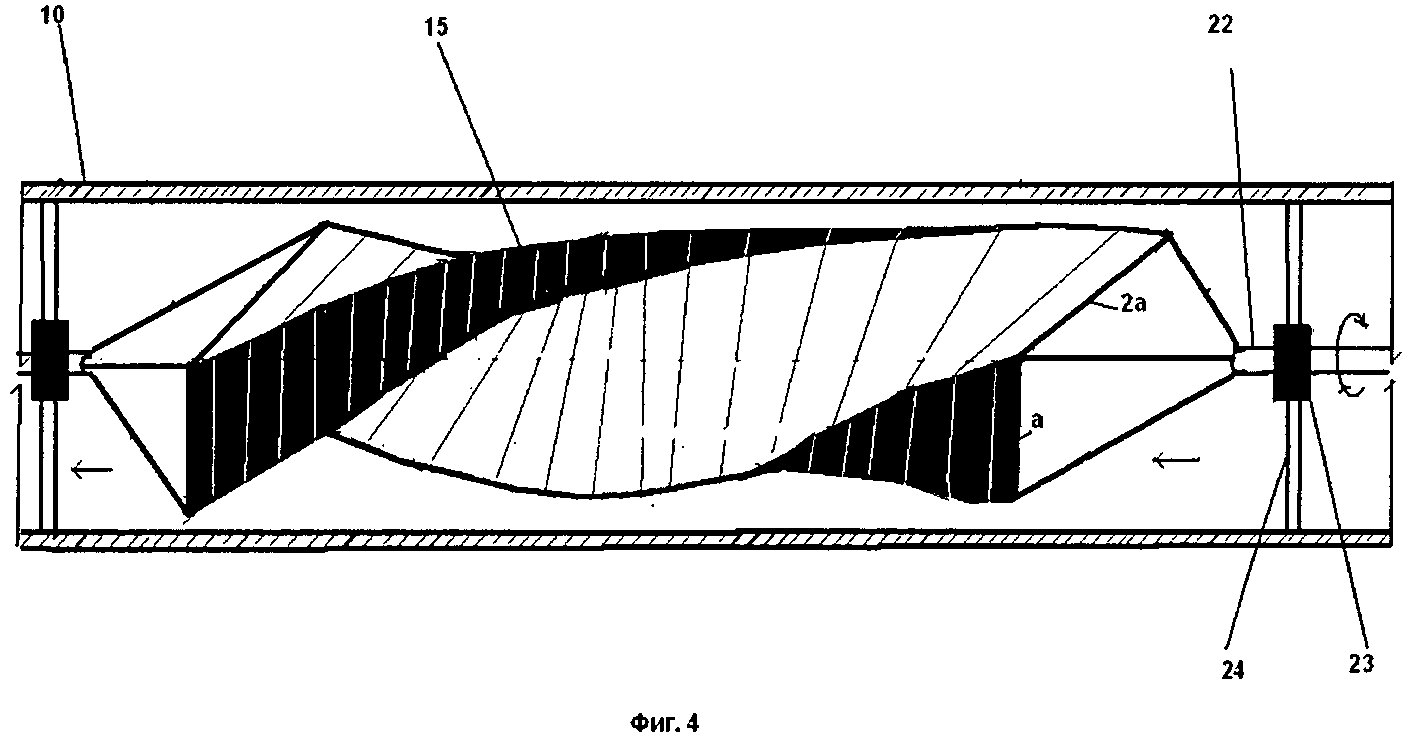
На фиг.4 - показан гидравлический движитель.
Подводный аппарат повышенной маневренности содержит обтекаемый корпус 1 в форме капли, иллюминатор 2, вертикальный водозаборник 3, люк 4, направляющие экраны 5 и раму 6. Корпус 1 изготовлен и прочной нержавеющей стали. Движительный комплекс включает водометные трубы (фронтальная 7, правая 8, кормовая 9, левая 10, и центральная 11), входные патрубки 12 размещены в полости вертикального водозаборника 3, а выходные патрубки 13 размещены в корпусе 1. В зоне выходных патрубков 13 в водометных трубах 7, 8, 9, 10, 11 установлены электрогенераторы 14, гидравлические движители 15 и электродвигатели 16 (фиг.1 и 2). Гидравлические движители 15 выполнены в виде пустотелой винтовой поверхности и имеют прямоугольное поперечное сечение (стороны а и 2а), а стенки-лопасти закручены по длине на угол от 0 до 180°. Направляющие экраны 5 имеют форму круглой чаши и с зазором (щель между поверхностью корпуса 1 и впадиной направляющего экрана 5) жестко крепятся к корпусу 1 в зонах выходных патрубков 13 водометных труб 7, 8, 9, 10, 11. Направляющие экраны 5 изготовлены из прочного гибкого пластика, не подверженного биообрастанию. В нижнем отсеке 17 корпуса 1 размещен контейнер 18 с коммутационно-защитной и электрораспределительной аппаратурой и контейнер 19 с аккумуляторными батареями. В верхнем отсеке 20 размещен пульт 21 управления и контроля аппарата (фиг.3). На фиг.4 показано размещение гидравлического движителя 15 в левой 10 водометной трубе, где вал 22, подшипники 23 и обтекаемые стойки крепления 24.
Работа подводного аппарата повышенной маневренности осуществляется следующим образом. Подводный аппарат повышенной маневренности имеет опору 6 для установки на плавсредстве с краном. Перед погружением следует зарядить аккумуляторные батареи, размещенные в контейнере 19 нижнего отсека 17, и проверить работу коммутационно-защитного и электрораспределительного оборудования, размещенного в контейнере 18. Члены экипажа через люк 4 опускается в верхний отсек 20 корпуса 1 и занимают рабочие места у пульта 21 управления и контроля аппарата перед иллюминатором 2. Рассмотрим работу движительного комплекса. На пульт 21 управления и контроля выведены исполнительные приборы управления работой движительного комплекса. От аккумуляторных батарей запускается электродвигатель 16, который раскручивает вал 22 (размещенный в подшипниках 23 со стойками крепления 24) гидравлического движителя 15 и электрогенератора 14. Далее рассмотрим движение воды при работе электродвигателя 16, например, левой 10 водометной трубы (работа других водометных труб 7, 8, 9 и 11 идентична). Вода через окна вертикального водозаборника 3 поступает во входной патрубок 12, и далее она захватывается гидравлическим движителем 15, и ускоренный закрученный поток через выходной патрубок 13 выбрасывается в полость направляющего экрана 5 и растекается по его поверхности. В щели между поверхностью корпуса 1 и впадиной направляющего экрана 5 возникает неоднородное поле скоростей. Благодаря этому в потоке возникнут инерционные силы, которые и будут создавать разряжение на поверхности корпуса 1, которые и приведут к движению аппарата вправо. Величина этой движущей силы зависит от скорости потока и площади направляющего экрана 5. В основе этого обоснования лежит эффект Коанда (energy-source.ru/-iv-/s19-.html, Г. Смирнов «Рожденные вихрем», 1982). Маневрирование аппарата при работе других водометных труб: фронтальной 7 - аппарат смещается назад; правой 8 - аппарат смещается влево; кормовой 9 - аппарат смещается вперед; центральной 11 - аппарат смещается вверх. Вниз опускается за счет отрицательной плавучести. При работе гидравлического движителя 15 электрогенератор 14 вырабатывает переменный электрический ток, который выпрямляется и заряжает аккумуляторные батареи. Идет постоянная подзарядка батарей.
Использование аппарата позволяет снизить потребляемую мощность движительного комплекса, аппарат легче по весу, проще в управлении и обладает высокой степенью маневренности.
Роторный рыбонасос
Рыбозащитное устройство с рыбоотводом
Способ формирования транспортирующего потока в магистральном трубопроводе
Буксировщик водолаза
Гидроэлектростанция на дне моря
Поплавковая волновая электростанция плавучего завода сжижения природного газа (спг)
Поплавковая волновая электростанция
Поплавковая волновая электростанция
Способ транспортировки газообразных и жидких продуктов по трубопроводу
Внутрисосудистый расширительный имплантат
Роторный рыбонасос
Рыбозащитное устройство с рыбоотводом
Способ формирования транспортирующего потока в магистральном трубопроводе
Буксировщик водолаза
Гидроэлектростанция на дне моря
Поплавковая волновая электростанция плавучего завода сжижения природного газа (спг)
Поплавковая волновая электростанция
Поплавковая волновая электростанция
Способ транспортировки газообразных и жидких продуктов по трубопроводу
Внутрисосудистый расширительный имплантат

