Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ
Вид РИД
Изобретение
Изобретение предназначено для использования в системах управления движением судов (СУДС) при осуществлении оператором управления проводкой судна по сложным фарватерам.
В общем случае, под влиянием ветра, течения и других факторов судно всегда смещается в ту или другую сторону с оси канала, по которому осуществляется его проводка, причем вектор движения судна за счет влияния этих же факторов не совпадает с продольной осью судна. Таким образом, диаметральная плоскость судна практически всегда образует угол α с осью канала (ракурс судна относительно оси канала) и судно в процессе движения занимает полосу, ширина которой намного превышает ширину судна. Величина этого угла в каждом конкретном случае может быть определена только путем прямых измерений. Однако используемые в настоящее время средства контроля, входящие в состав СУДС («Положение о системах управления движением судов». Министерство транспорта Российской Федерации. Государственная служба морского флота. Москва. 2002, п.4.10; «Руководство по Службам Движения Судов». Международная Ассоциация Маячных Служб. 2001, п.3.3.3), не обеспечивают прямое измерение вышеуказанного параметра, и оператор для его учета при выработке решений по корректировке курса судна вынужден опираться на прикидочные (опытно-расчетные) методы, собственный опыт и результаты глазомерных измерений отклонения судна от оси фарватера и динамики их изменения.
Существующие СУДС при решении задач контроля и управления движением (проводке) судна опираются на информацию от береговых радиолокационных (БРЛС), оптикоэлектронных средств (ОЭС), автоматических идентификационных систем (АИС) и данных от глобальных спутниковых навигационных систем ГЛОНАСС/GPS о координатах судна (точнее координатах места установки антенны аппаратуры ГЛОНАСС/GPS на судне, передаваемых с помощью каналов связи АИС в Центр СУДС). С их помощью оператор СУДС, осуществляющий поводку судна, получает информацию о месте нахождения проводимого судна, динамике его движения и совершаемых маневрах. При этом основным источником такой информации является БРЛС. Если по каким-то причинам информация БРЛС отсутствует, проводка в существующих СУДС невозможна, поскольку остальные источники информации обеспечивают только повышение точности и удобства решения задач судовождения.
Вместе с тем, реальная радиолокационная информация имеет специфические особенности, снижающие эффективность ее использования для обеспечения безопасности проводки судов.
Во-первых, это наличие трудно устранимых погрешностей как в определении пеленга на судно, которые возникают в основном за счет систематической погрешности передачи угла от антенны в индикатор, так и в определении дистанции - за счет нелинейности развертки.
Во-вторых, размер эхо-сигнала судна на экране БРЛС увеличивается с уменьшением дистанции до него. При этом центр отметки на экране соответствует средней суммарной отраженной энергии, т.е. совпадает со средней точкой отраженного от судна эхо-сигнала, форма и положение которого зависит, в первую очередь, от архитектуры судна и изменяется с изменением положения (ракурса) судна относительно БРЛС. Чтобы исключить погрешность из-за размеров судна, необходимо определить центр эхо-сигнала и осуществить его привязку (указать точку нахождения) к судну конкретных размерений и архитектуры при изменяющемся ракурсе, а это слишком сложная задача для БЛРС. При этом возможная систематическая погрешность измерений точки нахождения центра эхо-сигнала может оказаться близка по величине длине судна (десятки метров), поскольку при движении судна в сторону БРЛС или от нее реальный центр эхо-сигнала может относиться к носу или корме судна, существенно не совпадая с геометрическим центром.
Третий, и очень важный, недостаток в том, что при автоматизированной обработке радиолокационной информации необходим учет результатов довольно значительного ряда последовательных измерений исходных величин с целью отсеивания ложных целей и выработки значений навигационных параметров. Поэтому индицированные на дисплее значения параметров отстают по времени, и эта задержка выражается минутами. Вследствие этого именно в тот момент, когда точность параметров имеет наибольшее значение (при маневрировании), она минимальна.
Кроме того, РЛС не является всепогодным средством, т.к. надежность обнаружения и сопровождения целей существенным образом зависит от метеоусловий: наличия дождя, снега, грозы в атмосфере, а также от степени взволнованности морской поверхности.
Из второй из перечисленных особенностей (о том, что отметка от цели на экране индикатора РЛС не совпадает с центром цели и не дает информации о его реальном положении, а данные, получаемые от АИС и ГНСС, также дают информацию только о точке нахождения на судне антенны приемника ГНСС) следует весьма существенное затруднение для оператора СУДС, серьезно влияющее на эффективность решения им задач по обеспечению безопасности проводки судна.
Как указывалось выше, в общем случае, под влиянием ветра, течения и других факторов судно всегда смещается в ту или другую сторону с оси канала, по которому осуществляется его проводка, вектор движения судна, за счет влияния этих же факторов, не совпадает с продольной осью судна, а диаметральная плоскость судна практически всегда образует угол α с осью канала (ракурс судна относительно оси канала) и судно в процессе движения занимает полосу, ширина которой намного превышает ширину судна. Величина этого угла в каждом конкретном случае может быть определена только путем прямых измерений. Однако, как было показано выше, БРЛС не решает данную задачу.
При осуществлении проводки оператор реагирует на влияние смещающих факторов изменением курса судна, используя информацию БРЛС и фиксируя глазомерным способом смещение эхо-сигнала от меток на оси канала на экране БРЛС. При этом безопасность радиолокационной проводки судна по каналу обеспечивается только в том случае, если будет учтена погрешность определения с помощью БРЛС бокового уклонения судна в процессе проводки. Возможная величина этого уклонения может быть представлена в виде амплитуды колебательного движения проводимого судна относительно оси канала.
Таким образом, основой безопасности проводки в существующих СУДС является способность оператора заметить смещение эхо-сигнала от меток на оси канала на экране БРЛС. При этом, как указывалось выше, центру эхо-сигнала соответствует, как правило, центр одной из оконечностей судна в зависимости от направления его движения и других причин (в автоматизированной БРЛС обработка информации осуществляется только относительно центра эхо-сигнала). Поэтому оператор, определяя необходимое управляющее воздействие при коррекции курса проводимого судна, должен рассчитать приращение бокового уклонения наиболее удаленной скуловой части судна относительно центра эхо-сигнала за счет отличия от нуля угла между осью канала и продольной осью судна, для чего ему необходимо знать этот угол в данный момент. Расчеты показывают, что уже при небольших углах суммарного сноса динамическая ширина судна становится соизмеримой с полушириной канала, а это - теоретический предел возможности проводки.
Практика показывает, что величина замечаемых глазом оператора смещений эхо-сигнала на экране БРЛС зависит от размеров отметки и составляет 0,5-0,7 мм при размерах отметки 5-10 мм.
В общем случае, на практике оператор производит оценку боковых уклонений судна от оси канала с помощью БРЛС путем анализа характера движения судна, т.е. руководствуясь своим опытом. При этом изменение Δy0 первоначальной величины бокового уклонения он обнаружит тогда, когда оно превысит разрешающую способность глаза оператора,
Количественная зависимость коррекции курса от дистанции до судна, изменения бокового уклонения и периода между последовательными измерениями оператору достоверно неизвестна. Поэтому он выдает судну рекомендацию о поправке в курс, основываясь на опыте, как правило, в виде небольших величин порядка 1 - 2°.
Расчеты показывают, что при обычной скорости движения проводимого судна по каналу 6-10 узлов и принятом интервале выдачи информации о положении судна на канале 0,5 мин, величина сноса не будет превышать 4°, т.е. вышеизложенная технология более-менее обеспечивает успешность проводки. Однако быстрое изменение величины бокового уклонения, обнаруженное за промежуток времени менее 0,5 мин, потребует энергичного вмешательства оператора и назначения коррекции курса 6° и более, что в условиях неопределенности знания вышеуказанных количественных зависимостей, а также того факта, что данные о параметрах движения при маневрах выдаются БРЛС с задержкой в несколько минут, может привести к заходу какой-либо из оконечностей судна в опасную зону с непредсказуемыми последствиями.
Для более точного решения этой задачи в существующих СУДС может использоваться глазомерно-расчетный метод, когда заранее рассчитываются графики зависимостей для различных судов и условий, по которым оператор может ориентировочно определить углы сноса, приращение бокового уклонения и оценить точности определения маршрутных координат, исходя опять же из своих глазомерных оценок ситуации. Однако это требует от оператора совершения значительного числа операций, отвлекающих от контроля обстановки и не гарантирующих однозначного достижения успеха, особенно в сложных условиях плавания, поскольку они опираются на личные характеристики оператора, т.е. на человеческий фактор, зависящий от физического и психического состояния оператора, степени его усталости, воздействия на него раздражающих факторов, в том числе волнения из-за усложнения обстановки и пр.
Если на прямолинейных участках маршрута или участках с незначительными изменениями линейности вышеописанной технологии вполне достаточно для обеспечения безопасного судовождения, в случае сложных узких извилистых маршрутов, к тому же в сложных погодных условиях возможности безопасной проводки резко снижаются. А именно такие условия характерны для судовождения в зонах освоения шельфа.
Одной из наиболее значимых угроз в этом плане является необходимость осуществления судоходства среди комплексов надводных и подводных сооружений, для обеспечения транспортировки добытых углеводородов к потребителям, а также обеспечения функционирования самих этих комплексов, что требует повышенной точности осуществления операций по проводке судов при характерных для районов освоения месторождений морских углеводородов суровых погодных условиях.
Движение по узким извилистым фарватерам характерно также для речного судоходства, плавания в узких заливах, дельтах рек, мелководных акваториях с каналами для прохода судов и т.д.
Известен способ отображения движений судов, согласно которому предполагается в системах управления движением судов в акваториях морских каналов и фиордах с целью предотвращения посадок на мель использовать передачу, прием и фиксацию угловых координат судов по энергетическим экстремумам сигналов разнесенных радиоизлучателей, преобразование координат судов в прямоугольную систему координат с последующим отображением на индикаторах, при этом отображают электронное изображение фарватера относительно пространственных положений судов на индикаторах путем передачи, приема упорядоченных информационных радиопосылок, содержащих координаты точек дискретизации линии фарватера, преобразования их в систему координат судов и отображении их на индикаторах (RU 2052838 C1, G01S 13/93, 20.01.1996). Однако в конечном итоге положение судна на фарватере обозначается его координатами, полученными с использованием радиоприема упорядоченных информационных радиопосылок, содержащих текущие угловые характеристики диаграмм направленности двух разнесенных излучателей и координатные параметры точек дискретизации линии фарватера, фиксацией по энергетическим экстремумам излучателей угловых параметров судна, т.е. точкой, являющейся координатами приемо-излучателей, но не реальным положением продольной оси судна.
Задачей настоящего изобретения является разработка способа определения положения и характеристик движения судна при проводке его по сложному фарватеру.
В предлагаемом способе решение задачи оперативного получения оператором СУДС достоверной информации о положении судна на фарватере достигается введением в состав оборудования СУДС гидроакустических навигационных систем (ГАС), внешние устройства которых (приемно-передающие устройства) располагаются вблизи опасных участков фарватера, использованием информации от них для определения положения судна относительно оси фарватера, координат местоположения его геометрического центра, расстояний носа и кормы судна от границ фарватера (границ запретных зон) и динамики изменения этих параметров и представлении результатов расчетов в цифровом виде и в виде отображения на индикаторе оператору для использования при выработке решений по управлению движением проводимого судна.
Техническим результатом, обеспечиваемым изобретением, является повышение точности и оперативности определения параметров движения судов при прохождении опасных участков акватории, в том числе определения положения судна относительно границ фарватера (границ зон безопасности).
Указанный технический результат обеспечивается тем, что в способе определения положения и характеристик движения судна при проводке его по сложному фарватеру контролируемый участок фарватера сканируют с помощью активной гидроакустической системы, внешние приемно-передающие устройства которой размещены вблизи подводных или надводных препятствий или сложных участков маршрута, определяют контур ближайшей к приемно-передающему устройству стороны судна, измеряют азимут и дальность крайних точек контура, по которым определяют координаты места нахождения геометрического центра проводимого судна, направление его продольной оси, расстояния носа и кормы судна от границ фарватера и динамику изменения этих параметров.
Изобретение поясняется фиг.1, на которой представлена схема для расчета параметров положения судна.
Типовая ГАС в активном режиме работы осуществляет обнаружение цели, определение текущих азимута цели (угол β) и расстояния до нее (d).
На больших расстояниях до цели получаемое на индикаторе ГАС изображение цели представляет собой отметку, соответствующую средней величине сигнала от всего объекта, т.е. размеры и яркость которой соответствуют размерам цели и ее отражающей способности.
Однако в рассматриваемом случае, когда достаточно большая цель проходит вблизи от излучателей ГАС и расстояние до цели меняется в пределах от 1,5 - 3 км до сотен метров (т.е. в пределах ближней зоны ГАС), а проводимое судно довольно велико (именно проводка по сложным фарватерам крупнотоннажных судов типа танкеров представляет наибольшие трудности и грозит возможностью экологической катастрофы, чему имеется достаточно примеров из истории мореплавания в последние годы), получаемое изображение будет представлять не одну точку, соответствующую средней величине сигнала от всего объекта, а совокупность точек отражений от частей объекта, количество которых определяется размерами объекта и величиной дискретизации зоны обзора приемно-передающих устройств для обеспечения обнаружения и автоматизированного сопровождения цели. В совокупности эти точки будут повторять контур ближайшей к приемным устройствам стороны судна под тем углом (ракурсом), как он виден из точки установки приемно-передающих устройств, и на соответствующих дальностях (фиг.1).
Для каждой точки n из совокупности точек, составляющих контур цели, с помощью ГАС можно определить азимут и дальность (βn, dn). Это позволяет определить отдельно расстояния и азимуты ближайшей к ГАС (нос или корма в зависимости от ракурса) и наиболее удаленной (соответственно корма или нос) точек судна. Система обработки информации СУДС по этим данным с помощью довольно простых геометрических соотношений рассчитывает координаты места нахождения в данный момент геометрического центра проводимого судна и направление продольной оси судна, расстояния носа и кормы от границ фарватера и строит соответствующую модель. Результаты в виде изображения или в цифровом виде представляются оператору для использования при выработке команд по управлению проводкой, а также используются системой для анализа динамики изменения этих параметров, результаты которого также представляются оператору.
Определение указанных величин осуществляется следующим образом.
Известны:
- координаты точек установки приемо-передающих устройств ГАС;
- границы фарватера, маршрут движения судна (центральная линия фарватера) - координаты точек и углы;
- места нахождения надводных и подводных препятствий;
- тип проводимого судна, его размерения (длина, ширина);
- направление движения судна;
- скорость движения судна (как правило, на сложных участках маршрута не выше 6 узлов).
Все вышеуказанные координаты и углы известны с максимально доступной точностью, измеряются при вводе СУДС в строй и регулярно уточняются.
Поскольку на протяжении маршрута возможно наличие нескольких опасных участков, в этом случае используется несколько комплектов внешних устройств ГАС, располагаемых вблизи опасных участков и подключаемых к средствам приема и обработки информации последовательно по мере прохождения судном сложных участков маршрута.
До вхождения в зону действия данного приемо-передающего устройства ГАС маршрут судна может проходить по участкам меньшей сложности и тогда проводка судна осуществляется с помощью информации береговой радиолокационной станцией (БРЛС), входящей в состав оборудования СУДС, либо, если предшествующий участок также был сложным, совместно с другим комплектом приемо-передающих устройств ГАС. При выходе судна за установленные границы участка контроля предшествующий комплект приемо-передающих устройств ГАС отключается и подключается комплект нового участка. При входе судна в зону его действия ГАС выдает сигнал об обнаружении новой цели. Оператор идентифицирует эту цель, маркером отмечает ее как ранее обнаруженную и сопровождаемую под ранее присвоенным номером. При этом цель принимается на автоматическое слежение, обеспечивающее практически в реальном масштабе времени представление на индикаторе оператора положения судна и его ориентацию относительно границ опасных зон.
Дальнейшее описание производится в полярной системе координат, где за центр О принимается точка нахождения приемо-передающей части ГАС, а за нулевую линию принимается направление меридиана (фиг.1).
ГАС осуществляет автоматическое слежение за маркированной целью, определяя и выдавая в систему обработки информации углы (азимуты), под которыми видны крайние точки объекта контроля (β1, β2) и расстояния до них (d1, d2). При этом, поскольку направление движения объекта известно, индекс 1 присваивается носу, индекс 2 - корме судна. Однако, поскольку к носу судно сужается, использование значений (β1, β2, d1, d2) для построения линии, параллельной продольной оси судна, приведет к существенной ошибке в сторону увеличения искомого угла, коррекция которой может быть осуществлена с использованием довольно простых геометрических построений и расчетов.
Продольная ось судна проходит через точку N (β1, d1) - нос судна и середину кормы точку K, координаты которой получаются добавлением к значению d2 расчетной величины dwr/2 - половины ширины судна dw с учетом ракурса судна относительно точки О.
Расчеты искомых параметров могут быть осуществлены различными путями.
Вариант 1.
По данным (β1, β2, d1, d2+dwr/2) строится треугольник NKO, сторона которого NK по направлению и положению совпадает с продольной осью судна.
По известным значениям координат точек - вершин треугольника определяются координаты точки С - геометрического центра судна, находящегося в средней точке стороны NK, и угол α - угол между касательной к оси фарватера в точке пересечения линии ОС с осью фарватера (если судно находится дальше оси фарватера от точки О), или ее продолжения (в случае отклонения судна от оси фарватера в ближнюю сторону к точке О) и продольной осью судна в данный момент. Отсюда легко рассчитать расстояния от точки N - носа судна до ближайших границ фарватера, и, зная размерения судна, такие же расстояния от правой и левой стороны кормы.
Вариант 2.
Так же, как в первом варианте, определяются углы (азимуты), под которыми видны крайние точки объекта контроля (β1, β2) и расстояния до них (d1, d2). По измеренным значениям углов определяется угол βв=(β1, -β2) - угол, модуль которого является углом, который объект занимает в поле зрения ГАС. С их использованием можно определить угол визирования средней точки С корпуса судна βс:
βс=β1+βв/2.
Затем с помощью ГАС измеряется расстояние dc, соответствующее углу βс, и по значениям (β1, β2, d1, d2+dwr/2) строится треугольник NCO, направление стороны NC которого совпадает с направлением продольной оси судна, а для определения положения продольной оси необходимо удвоить эту сторону в направлении конца С. Причем точка С с координатами (βс, dc+dwr/2) является точкой нахождения геометрического центра судна в данный момент, что позволяет легко вычислить ее отклонение от середины фарватера, определяя тем самым истинное положение судна.
Полученное значение координат точки С несколько отличается от реального за счет того, что координаты (β2, d2) могут отличаться от координат точки K за счет ракурса судна относительно точки О. Однако отличие незначительно и может быть учтено расчетом реального положения методом последовательных приближений.
Из полученных результатов о положении продольной оси судна и известных данных о границах фарватера и размерениях судна легко вычисляются угол α продольной оси относительно известного направления оси фарватера в данной точке, а также значения расстояний кормы и носа от границ фарватера.
Определение динамических параметров изменения указанных величин для обоих вариантов производится сравнением измерений через заданные промежутки времени. Причем, поскольку цель очень велика и находится в ближней зоне ГАС, получаемый от нее эхо-сигнал также велик, что позволяет значительно повысить порог обнаружения сигнала и тем самым отсечь большинство помех и ложных сигналов. Поэтому нет необходимости накапливать как для РЛС результаты за довольно длительный промежуток времени для выделения полезного сигнала на фоне помех.
Таким образом, включение в состав средств контроля СУДС ГАС, внешние устройства которых (приемно-передающие устройства) располагаются вблизи опасных участков фарватера, а получаемая от них информация о положении проходящего вблизи судна используется для определения положения продольной оси судна относительно оси фарватера, координат местоположения его геометрического центра, расстояний носа и кормы судна от границ фарватера (границ запретных зон) и динамики изменения этих параметров, представление результатов расчетов в цифровом виде и в виде отображения на индикаторе оператору для использования при выработке решений по управлению движением проводимого судна, освобождает оператора от необходимости вглядываться в экран индикатора, чтобы уловить минимальные отклонения от маршрута, от проведения сопутствующих сложных операций расчета данных для определения необходимой коррекции, а также обеспечивает его без существенной задержки данными, которые могут помочь немедленно скорректировать отклонения и возможные ошибочные действия. Предлагаемая технология позволяет устранить, либо существенно снизить недостатки, присущие существующим СУДС, опирающимся на использование в основном радиолокационной информации, оперативно обеспечить оператора информацией о положении судна в ходе выполнения маневров и тем самым обеспечить существенное повышение безопасности судовождения в сложных судоходных и погодных условиях, соответственно снизить возможность экологических катастроф, а также позволить успешно завершить проводку судна (или вывести его в безопасное место) в условиях внезапного отсутствия или снижения качества информации от других средств контроля СУДС (БРЛС, АИС, ГЛОНАСС/GPS), используя информацию только от ГАС.
Изобретение обеспечивает решения проблемы повышения безопасности судовождения и, соответственно, экологической безопасности и безопасности уникальных инженерных сооружений, за счет повышения точности и оперативности определения параметров движения судов при прохождении опасных участков акватории, в том числе определения положения судна относительно границ фарватера (границ зон безопасности).
Для установки на сложных участках фарватеров и выполнения вышеуказанных операций могут быть использованы существующие ГАС, работающие в активном режиме, осуществляющие автоматическое слежение за объектом и обеспечивающие необходимую для данной конкретной СУДС точность определения азимутов и дальностей до цели, например, такие как описанная в патенте RU 2225991 «Навигационная гидроакустическая станция освещения ближней обстановки», G01S 15/00, G01S 7/52 или гидроакустические станции активного действия (http://slovari.yandex.ru > БСЭ. 1969-1978).
Для осуществления заявленного способа необходима доработка программного обеспечения системы обработки информации СУДС для обеспечения выполнения описанных выше операций и формирования изображения на индикаторе оператора.
Способ определения положения и характеристик движения судна при проводке его по сложному фарватеру оператором системы управления движением судов, заключающийся в том, что, с помощью входящей в состав системы управления движением судов активной гидроакустической системы, внешние приемно-передающие устройства которой размещены вблизи подводных или надводных препятствий или сложных участков маршрута, сканируют контролируемый участок, определяют контур ближайшей к приемно-передающему устройству стороны проводимого судна, измеряют азимут и дальность крайних точек контура, по которым определяют координаты места нахождения геометрического центра проводимого судна, направление его продольной оси, расстояния носа и кормы судна от границ фарватера и динамику изменения этих параметров.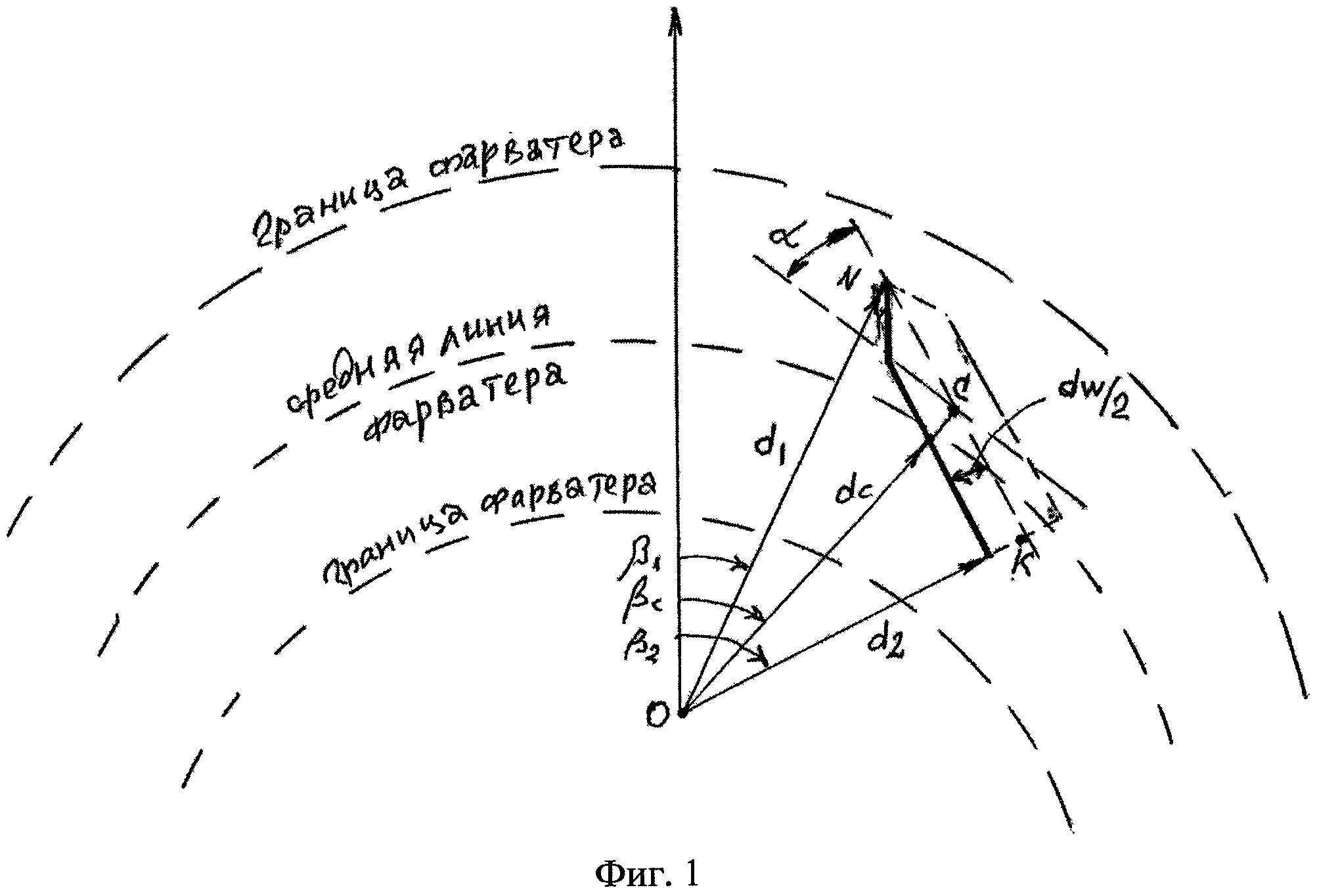
Автоматизированная система связи
Способ измерения параметров физических полей верхней полусферы морского объекта
Плавсредство рыбопромысловое для оборудования амфибийных гусеничных машин
Способ управления движением судна по заданной траектории
Устройство для формирования траектории перевода судна на новый курс
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления
Способ определения зачетных натурных испытаний сложного технического комплекса средств вооружения корабля
Способ подготовки проведения натурных испытаний сложного технического комплекса средств вооружения корабля
Испытательный стенд сложного технического комплекса средств вооружения корабля и способ проведения исследований, отработки и подготовки натурных испытаний сложного технического комплекса средств вооружения корабля
Автоматизированная система связи
Способ измерения параметров физических полей верхней полусферы морского объекта
Плавсредство рыбопромысловое для оборудования амфибийных гусеничных машин
Способ управления движением судна по заданной траектории
Устройство для формирования траектории перевода судна на новый курс
Холодильно-технологический комплекс для предварительного охлаждения и временного хранения рыбы
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления
Способ определения зачетных натурных испытаний сложного технического комплекса средств вооружения корабля
Способ подготовки проведения натурных испытаний сложного технического комплекса средств вооружения корабля
Испытательный стенд сложного технического комплекса средств вооружения корабля и способ проведения исследований, отработки и подготовки натурных испытаний сложного технического комплекса средств вооружения корабля

