Результат интеллектуальной деятельности: СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного, наземного и морского пространства с использованием прямых и рассеянных подвижными объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Технология скрытного обнаружения и слежения за объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения: широковещательные (УКВ FM-радиовещание, ДМВ цифровое телевидение), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то что может существенно повысить эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Принятый радиосигнал, как правило, включает мощные прямые радиосигналы и рассеянные от земной инфраструктуры компоненты сигнала выбранного передатчика радиоподсвета целей. Кроме того, он содержит задержанные по времени и сдвинутые на частоту доплеровского смещения рассеянные объектами сигналы, а также сигналы других неконтролируемых источников, работающих на частоте, совпадающей с частотой приема. Для эффективного обнаружения и точной пространственной локализации широкого класса объектов (автомобили, корабли, самолеты и беспилотные летательные аппараты, вертолеты, ракеты, спускаемые аппараты) необходимо качественное выделение слабых рассеянных от объектов радиосигналов на фоне мощного прямого сигнала выбранного передатчика радиоподсвета, а также на фоне сигналов других нежелательных источников. В наиболее типичных ситуациях уровень помех на 40-60 дБ превышает уровень рассеянных сигналов.
Системы скрытной радиолокации включают канал приема прямого сигнала передатчика подсвета и разведывательный канал.
Традиционно в системах скрытной радиолокации частичное подавление помехи в виде прямого сигнала передатчика подсвета осуществляется за счет минимизации боковых лепестков, формирования нуля в диаграмме направленности антенны или адаптивной пространственной фильтрации полезных сигналов в разведывательном канале.
Дополнительное подавление прямого сигнала может быть достигнуто за счет использования в разведывательном канале антенны с поляризацией, ортогональной к поляризации радиосигнала передатчика подсвета.
Однако лучшие характеристики систем скрытной радиолокации могут быть достигнуты при использовании двух разведывательных каналов с ортогональными поляризациями. Это обусловлено тем, что рассеянный целью сигнал, как правило, имеет случайную поляризацию. Как следствие, некогерентное суммирование изображений в координатах «временная задержка (дальность) - доплеровская частота (скорость)», формируемых с использованием радиосигналов двух ортогональных поляризаций, обеспечивает увеличение среднего отношения сигнал/шум по сравнению с использованием единственной фиксированной поляризации.
Известен способ поляризационно-чувствительного обнаружения подвижных объектов [1], включающий прием рассеянных подвижными объектами радиосигналов неизвестной поляризации малобазовой антенной решеткой, состоящей из ортогонально расположенных антенн с совмещенными фазовыми центрами, формирование ансамбля радиосигналов, зависящего от времени и номера антенны, синхронное преобразование ансамбля принятых радиосигналов в цифровые сигналы, преобразование цифровых сигналов пар противоположных антенн в комплексные квадратурные составляющие дипольного и квадрупольного выходных сигналов, определение наличия рассеянных подвижными объектами радиосигналов и направлений их прихода по сигналам квадратурных составляющих дипольного и квадрупольного выходных сигналов.
Данный способ обеспечивает повышенную устойчивость обнаружения и пространственной локализации к поляризационным ошибкам. Однако этот способ относится к классу способов малобазового пеленгования, что является принципиальным ограничением на пути достижения потенциально возможных точностей пространственной локализации подвижных объектов.
Известен способ поляризационно-чувствительного обнаружения подвижных объектов [2], свободный от этих недостатков и принятый за прототип. Согласно этому способу:
используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые широкополосными передатчиками радиоэлектронных систем различного назначения;
принимают решеткой из N антенн компоненты горизонтальной и вертикальной поляризации векторного многолучевого электромагнитного поля прямого и рассеянных радиосигналов;
синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы;
цифровые сигналы преобразуют в двухкомпонентные прямой  и рассеянные
и рассеянные  сигналы для выбранных азимутально-угломестных направлений приема ℓ, где h и ν - индексы, обозначающие компоненты горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают;
сигналы для выбранных азимутально-угломестных направлений приема ℓ, где h и ν - индексы, обозначающие компоненты горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают;
вычисляют и сравнивают энергию компонент  и
и  прямого сигнала;
прямого сигнала;
выбирают компоненту прямого сигнала с максимальной энергией  ;
;
преобразуют компоненту прямого сигнала с максимальной энергией  в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом;
в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом;
для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал sℓ в сигналы компонент комплексного частотно-временного изображения  , где AH - матрица, эрмитово сопряженная с A;
, где AH - матрица, эрмитово сопряженная с A;
после чего по локальным максимумам суммы квадратов модулей элементов компонент комплексного частотно-временного изображения  , где
, где  и
и  - z-е элементы сигналов компонент
- z-е элементы сигналов компонент  и
и  , определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
, определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
Способ-прототип реализует достаточно эффективное обнаружение подвижных объектов в условиях неизвестной поляризации рассеянных объектами сигналов.
Однако способ-прототип при формировании сигналов компонент горизонтальной и вертикальной поляризации комплексного частотно-временного изображения использует операции, основанные на формировании нормированной классической двумерной взаимной корреляционной функции, которая, кроме основного лепестка, содержит высокие боковые лепестки, маскирующие сигналы далеких и слаборассеивающих объектов.
Таким образом, недостатком способа-прототипа является низкая вероятность обнаружения далеких и слаборассеивающих объектов.
Техническим результатом изобретения является повышение вероятности обнаружения далеких и слаборассеивающих объектов.
Повышение вероятности обнаружения достигается за счет применения новых операций поляризационно-чувствительной нелинейной итерационной обработки радиосигналов, обеспечивающих повышение чувствительности и динамического диапазона при формировании компонент горизонтальной и вертикальной поляризации двухкомпонентного комплексного частотно-временного изображения радиосигналов, рассеянных объектами в анализируемой области доплеровских частот и временных задержек.
Технический результат достигается тем, что в способе поляризационно-чувствительного обнаружения подвижных объектов, заключающемся в том, что используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые широкополосными передатчиками радиоэлектронных систем различного назначения, принимают решеткой из N антенн компоненты горизонтальной и вертикальной поляризации векторного многолучевого электромагнитного поля прямого и рассеянных радиосигналов, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в двухкомпонентные прямой  и рассеянные
и рассеянные  сигналы для выбранных азимутально-угломестных направлений приема ℓ, где h и ν - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают, вычисляют и сравнивают энергию компонент
сигналы для выбранных азимутально-угломестных направлений приема ℓ, где h и ν - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают, вычисляют и сравнивают энергию компонент  и
и  прямого сигнала, выбирают компоненту прямого сигнала с максимальной энергией
прямого сигнала, выбирают компоненту прямого сигнала с максимальной энергией  , согласно изобретению, для каждого ожидаемого значения доплеровского сдвига частоты ω преобразуют компоненту прямого сигнала с максимальной энергией
, согласно изобретению, для каждого ожидаемого значения доплеровского сдвига частоты ω преобразуют компоненту прямого сигнала с максимальной энергией  в матричный сигнал комплексной фазирующей функции Aω, включающий гипотетические сигналы, рассеиваемые в ожидаемой области задержек каждым потенциальным подвижным и стационарным объектом, матричный сигнал Aω запоминают, для каждого выбранного азимутально-угломестного направления приема и каждого ожидаемого значения доплеровского сдвига частоты преобразуют рассеянный сигнал каждой компоненты
в матричный сигнал комплексной фазирующей функции Aω, включающий гипотетические сигналы, рассеиваемые в ожидаемой области задержек каждым потенциальным подвижным и стационарным объектом, матричный сигнал Aω запоминают, для каждого выбранного азимутально-угломестного направления приема и каждого ожидаемого значения доплеровского сдвига частоты преобразуют рассеянный сигнал каждой компоненты  и
и  в сигнал элемента компоненты комплексного частотно-временного изображения
в сигнал элемента компоненты комплексного частотно-временного изображения  и
и  , где
, где  - матрица, эрмитово сопряженная с Aω, сигналы элементов компонент изображения
- матрица, эрмитово сопряженная с Aω, сигналы элементов компонент изображения  и
и  запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал
запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал  , где
, где  и
и  - z-е составляющие векторов элементов компонент изображения
- z-е составляющие векторов элементов компонент изображения  и
и  , k=1, 2, … - номер итерации, и сигналы очередного приближения элементов компонент изображения
, k=1, 2, … - номер итерации, и сигналы очередного приближения элементов компонент изображения  и
и  , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, объединяют сформированные сигналы элементов компонент
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, объединяют сформированные сигналы элементов компонент  и
и  в результирующие матричные сигналы компонент изображения
в результирующие матричные сигналы компонент изображения  и
и  , после чего по локальным максимумам суммы квадратов модулей составляющих результирующих матричных сигналов компонент комплексных частотно-временных изображений
, после чего по локальным максимумам суммы квадратов модулей составляющих результирующих матричных сигналов компонент комплексных частотно-временных изображений  , где
, где  и
и  - ωq-е составляющие матричных сигналов
- ωq-е составляющие матричных сигналов  и
и  , определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига частоты и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
, определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига частоты и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
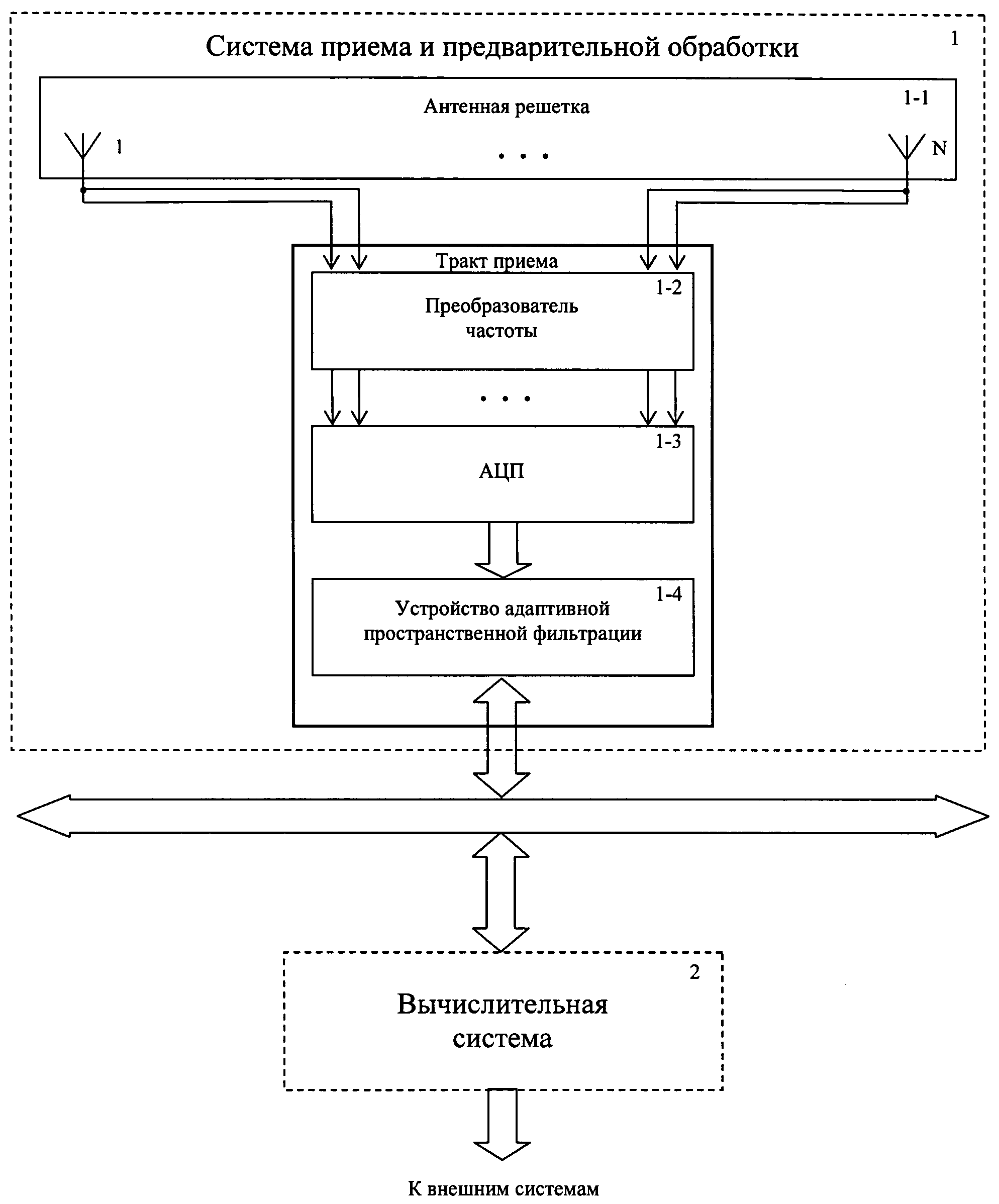
Операции способа поясняются чертежом.
Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные систему приема и предварительной обработки 1 и вычислительную систему 2.
В свою очередь, система приема и предварительной обработки 1 включает антенную решетку 1-1, тракт приема прямых и рассеянных сигналов, включающий преобразователь частоты 1-2, АЦП 1-3 и устройство адаптивной пространственной фильтрации 1-4.
При этом система 2 имеет выход, предназначенный для подключения к внешним системам.
Система 1 является аналогово-цифровым устройством и предназначена для адаптивной пространственной фильтрации полезных прямых и рассеянных объектами радиосигналов.
Антенная решетка 1-1 состоит из N антенн с номерами  . Каждая антенна обеспечивает одновременный ненаправленный или направленный прием двух скалярных полей - ортогональных составляющих поляризованной волны в точке приема и имеет два отдельных выхода для радиосигналов горизонтальной (h) и вертикальной (ν) поляризаций.
. Каждая антенна обеспечивает одновременный ненаправленный или направленный прием двух скалярных полей - ортогональных составляющих поляризованной волны в точке приема и имеет два отдельных выхода для радиосигналов горизонтальной (h) и вертикальной (ν) поляризаций.
Пространственная конфигурация антенной решетки может быть произвольной: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной.
Преобразователь частоты 1-2 является 2N-канальным, выполнен с общим гетеродином и с полосой пропускания каждого канала, изменяемой в соответствии с шириной спектра принимаемого радиосигнала. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов.
АЦП 1-3 также является 2N-канальным и синхронизирован сигналом одного опорного генератора (для упрощения опорный генератор на схеме не показан). Если разрядность и быстродействие АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то вместо преобразователя частоты 1-2 могут использоваться частотно избирательные полосовые фильтры и усилители. Кроме этого, преобразователь частоты 1-2 обеспечивает подключение одной из антенн вместо всех антенн решетки для периодической калибровки приемных каналов по внешнему источнику сигнала. Возможна калибровка с использованием внутреннего генератора, выход которого также подключается вместо всех антенн для периодической калибровки каналов (для упрощения внутренний генератор на схеме не показан).
Устройство 1-4 представляет собой вычислительное устройство, обеспечивающее адаптивную пространственную фильтрацию.
Вычислительная система 2 предназначена для итерационного формирования двухкомпонентного сигнала комплексного частотно-временного изображения радиосигналов, рассеянных объектами в анализируемой области доплеровских частот и временных задержек, а также обнаружения и пространственной локализации подвижных объектов.
Устройство работает следующим образом.
В системе 2 на основе данных от внешних систем идентифицируется, выбирается и периодически обновляется совокупность передатчиков, излучающих радиосигналы с расширенным спектром.
Параметры выбранного множества передатчиков (номер, несущая частота, ширина спектра, форма, мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно точки приема) запоминаются в системе 2, а также используются для настройки преобразователя 1-2. С целью упрощения цепи управления преобразователем не показаны.
Преобразователь частоты 1-2 по сигналам системы 2 перестраивается на заданную частоту приема.
Принятое каждой антенной с номером n решетки 1-1 векторное многолучевое электромагнитное поле прямого и рассеянных радиосигналов в виде зависящих от времени t радиосигналов горизонтальной  и вертикальной
и вертикальной  поляризаций поступает на входы преобразователя частоты 1-2.
поляризаций поступает на входы преобразователя частоты 1-2.
В преобразователе частоты 1-2 каждый принятый радиосигнал  и
и  фильтруется по частоте и переносится на более низкую частоту.
фильтруется по частоте и переносится на более низкую частоту.
Сформированный в преобразователе 1-2 ансамбль радиосигналов  и
и  синхронно преобразуется с помощью АЦП 1-3 в цифровые сигналы
синхронно преобразуется с помощью АЦП 1-3 в цифровые сигналы  и
и  , где i - номер временного отсчета сигнала, которые поступают в устройство 1-4, где запоминаются.
, где i - номер временного отсчета сигнала, которые поступают в устройство 1-4, где запоминаются.
В устройстве 1-4 цифровые сигналы преобразуются в двухкомпонентные прямой  и рассеянные
и рассеянные  сигналы для выбранных азимутально-угломестных направлений приема ℓ.
сигналы для выбранных азимутально-угломестных направлений приема ℓ.
Преобразование цифровых сигналов в двухкомпонентный прямой сигнал  и двухкомпонентные рассеянные сигналы sℓ для выбранных азимутально-угломестных направлений приема осуществляется известными способами адаптивной пространственной фильтрации [3].
и двухкомпонентные рассеянные сигналы sℓ для выбранных азимутально-угломестных направлений приема осуществляется известными способами адаптивной пространственной фильтрации [3].
При этом, например, из цифровых сигналов горизонтальной поляризации  формируется сигнал пространственной корреляционной матрицы входных сигналов R. Сигнал корреляционной матрицы R преобразуется в сигнал оптимального весового вектора w=R-1η для формирования прямого сигнала, где η - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны (частотой) и геометрией решетки.
формируется сигнал пространственной корреляционной матрицы входных сигналов R. Сигнал корреляционной матрицы R преобразуется в сигнал оптимального весового вектора w=R-1η для формирования прямого сигнала, где η - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны (частотой) и геометрией решетки.
После этого цифровые сигналы  объединяются в матричный цифровой сигнал X, преобразованием которого формируется сигнал
объединяются в матричный цифровой сигнал X, преобразованием которого формируется сигнал  , являющийся векторным сигналом компоненты горизонтальной поляризации прямого сигнала
, являющийся векторным сигналом компоненты горизонтальной поляризации прямого сигнала  , где I - число временных отсчетов сигнала, принятого в выбранном азимутально-угломестном направлении.
, где I - число временных отсчетов сигнала, принятого в выбранном азимутально-угломестном направлении.
Аналогично осуществляется формирование компоненты вертикальной поляризации прямого сигнала  , а также компонент
, а также компонент  и
и  рассеянных сигналов для выбранных азимутально-угломестных направлений приема ℓ.
рассеянных сигналов для выбранных азимутально-угломестных направлений приема ℓ.
Физически описанные операции адаптивной пространственной фильтрации обеспечивают одновременный направленный прием с заданных направлений двух компонент полезного прямого сигнала выбранного передатчика подсвета и двух компонент полезного рассеянного сигнала в направлении приема ℓ с одновременным подавлением широкого класса помех, приходящих с других направлений.
Полученные двухкомпонентные сигналы совместно со значением азимутально-угломестного направления приема ℓ поступают в вычислительную систему 2, где запоминаются.
В вычислительной системе 2 выполняются следующие действия:
- вычисляется и сравнивается энергия компонент  и
и  прямого сигнала;
прямого сигнала;
- выбирается компонента прямого сигнала с максимальной энергией  ;
;
- для каждого ожидаемого значения доплеровского сдвига частоты ω компонента прямого сигнала с максимальной энергией  преобразуется в матричный сигнал комплексной фазирующей функции Aω, включающий гипотетические сигналы, рассеиваемые в ожидаемой области задержек каждым потенциальным подвижным и стационарным объектом.
преобразуется в матричный сигнал комплексной фазирующей функции Aω, включающий гипотетические сигналы, рассеиваемые в ожидаемой области задержек каждым потенциальным подвижным и стационарным объектом.
Преобразование компоненты прямого сигнала с максимальной энергией  в матричный сигнал Aω осуществляется по следующей формуле:
в матричный сигнал Aω осуществляется по следующей формуле:
 ,
,
где  - векторы размером I×1, являющиеся сдвинутыми по времени на qTs версиями прямого сигнала
- векторы размером I×1, являющиеся сдвинутыми по времени на qTs версиями прямого сигнала  , q=0, …, Q-1, Q - число временных задержек прямого сигнала, Ts - период выборки сигнала;
, q=0, …, Q-1, Q - число временных задержек прямого сигнала, Ts - период выборки сигнала;
- матрицы доплеровских сдвигов, ω=0, ±1, …, ±Ω, (2Ω+1) - размер координатной сетки по доплеровскому сдвигу. Размеры матриц Dω и Aω, соответственно, равны I×I и I×2Q.
Таким образом, столбцы матрицы Aω представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии прямого сигнала  , а размер этой матрицы I×2Q определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию;
, а размер этой матрицы I×2Q определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию;
- матричный сигнал комплексной фазирующей функции Aω запоминается.
После этого в вычислительной системе 2 для каждого выбранного азимутально-угломестного направления приема и каждого ожидаемого значения доплеровского сдвига частоты, пробегающего дискретный ряд значений ω/(ITs) (ω=0, ±1, …, ±Ω), выполняются следующие действия:
- преобразуется рассеянный сигнал каждой компоненты  и
и  в сигнал элемента компоненты комплексного частотно-временного изображения
в сигнал элемента компоненты комплексного частотно-временного изображения  ;
;
- сигналы элементов компонент изображения  и
и  запоминаются и используются в качестве начального приближения;
запоминаются и используются в качестве начального приближения;
- итерационно формируется зависящий от предыдущего решения вспомогательный матричный сигнал  , где
, где  и
и  - z-е составляющие компонент
- z-е составляющие компонент  и
и  , k=1, 2, … - номер итерации, и сигналы очередного приближения элементов компонент изображения
, k=1, 2, … - номер итерации, и сигналы очередного приближения элементов компонент изображения  и
и  , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог;
, где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог;
- после выполнения заданного числа итераций, сформированные сигналы элементов горизонтальной компоненты изображения  объединяются в результирующий матричный сигнал горизонтальной компоненты изображения
объединяются в результирующий матричный сигнал горизонтальной компоненты изображения  , а сигналы элементов вертикальной компоненты изображения
, а сигналы элементов вертикальной компоненты изображения  объединяются в результирующий матричный сигнал вертикальной компоненты изображения
объединяются в результирующий матричный сигнал вертикальной компоненты изображения  по формулам:
по формулам:
 ,
,
 ;
;
- по локальным максимумам суммы квадратов модулей составляющих результирующих матричных сигналов компонент комплексных частотно-временных изображений  , где
, где  и
и  - ωq-е составляющие матричных сигналов
- ωq-е составляющие матричных сигналов  и
и  , определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига частоты и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
, определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига частоты и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
При этом выполняются следующие действия:
- сравниваются с порогом значения доплеровского сдвига каждого рассеянного сигнала и при превышении порога принимается решение об обнаружении подвижного объекта в анализируемом азимутально-угломестном направлении приема.
Порог выбирается исходя из минимизации вероятности пропуска объекта;
- по значению временной задержки сигнала τ определяется кажущаяся дальность до объекта D=τc, где с - скорость света;
- определяются пространственные координаты обнаруженного объекта по кажущейся дальности D и значениям азимута и угла места приема рассеянных сигналов, например, в соответствии с [4].
При этом для пары «устройство обнаружения - передатчик» строится эллипсоид равных кажущихся дальностей, соответствующих геометрическому месту точек в пространстве, сумма расстояний до которых (от передатчика до объекта и от объекта до устройства обнаружения) равна найденному значению кажущейся дальности D. По пересечению эллипсоида и значения направления (азимут и угол места) приема рассеянных сигналов определяются географические координаты обнаруженного объекта.
Результаты обнаружения и пространственной локализации воздушных объектов отображаются для повышения информативности.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение вероятности обнаружения далеких и слаборассеивающих объектов за счет применения новых операций нелинейного формирования сигналов элементов поляризационных компонент изображения  и
и  (для каждого ℓ-го азимутально-угломестного направления приема и для каждого ожидаемого значения доплеровского сдвига частоты ω принятых сигналов) и последующего их объединения в результирующие матричные сигналы компонент изображения
(для каждого ℓ-го азимутально-угломестного направления приема и для каждого ожидаемого значения доплеровского сдвига частоты ω принятых сигналов) и последующего их объединения в результирующие матричные сигналы компонент изображения  и
и  .
.
Таким образом, за счет применения в каждом азимутально-угломестном направлении поиска объектов вместо поляризационно-чувствительной классической двумерной взаимной корреляции операций поляризационно-чувствительной нелинейной итерационной обработки радиосигналов, обеспечивающей повышение чувствительности и динамического диапазона при формировании компонент горизонтальной и вертикальной поляризации двухкомпонентного частотно-временного изображения радиосигналов, рассеянных объектами в анализируемой области доплеровских частот (скоростей) и временных задержек (дальностей), удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. RU, патент, 2158002, кл. G01S 13/14, 2000 г.
2. US, патент, 7304603 B2, кл. G01S 13/02, 2007 г.
3. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь. 2003 г.
4. RU, патент, 2444754 C15, кл. G01S 13/02, 2012 г.
Способ поляризационно-чувствительного обнаружения подвижных объектов, заключающийся в том, что используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые широкополосными передатчиками радиоэлектронных систем различного назначения, принимают решеткой из N антенн компоненты горизонтальной и вертикальной поляризации векторного многолучевого электромагнитного поля прямого и рассеянных радиосигналов, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в двухкомпонентные прямой и рассеянные сигналы для выбранных азимутально-угломестных направлений приема l, где h и ν - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают, вычисляют и сравнивают энергию компонент и прямого сигнала, выбирают компоненту прямого сигнала с максимальной энергией , отличающийся тем, что для каждого ожидаемого значения доплеровского сдвига частоты ω преобразуют компоненту прямого сигнала с максимальной энергией в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые в ожидаемой области задержек каждым потенциальным подвижным и стационарным объектом, матричный сигнал A запоминают, для каждого выбранного азимутально-угломестного направления приема и каждого ожидаемого значения доплеровского сдвига частоты преобразуют рассеянный сигнал каждой компоненты и в сигнал элемента компоненты комплексного частотно-временного изображения , где - матрица, эрмитово сопряженная с A, сигналы элементов компонент изображения и запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал , где и - z-е составляющие векторов элементов компонент изображения и , k=1,2,… - номер итерации, и сигналы очередного приближения элементов компонент изображения и , где λ - множитель Лагранжа, до тех пор, пока номер текущей итерации не превысит заданный порог, объединяют сформированные сигналы элементов компонент и в результирующие матричные сигналы компонент изображения и , после чего по локальным максимумам суммы квадратов модулей составляющих результирующих матричных сигналов компонент комплексных частотно-временных изображений , где и - ωq-е составляющие матричных сигналов и , определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига частоты и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.






















Способ пассивного обнаружения воздушных объектов
Способ приема сигналов в системах скрытной радиолокации
Способ пеленгования с повышенной разрешающей способностью
Способ скрытного обнаружения подвижных объектов
Способ обнаружения подвижных объектов
Способ обнаружения малоразмерных подвижных объектов
Способ обнаружения и пространственной локализации подвижных объектов
Способ поиска малозаметных подвижных объектов
Способ скрытной радиолокации подвижных объектов
Способ обнаружения малозаметных подвижных объектов
Способ пассивного обнаружения воздушных объектов
Способ приема сигналов в системах скрытной радиолокации
Способ пеленгования с повышенной разрешающей способностью
Способ скрытного обнаружения подвижных объектов
Способ обнаружения подвижных объектов
Способ обнаружения малоразмерных подвижных объектов
Способ обнаружения и пространственной локализации подвижных объектов
Способ поиска малозаметных подвижных объектов
Способ скрытной радиолокации подвижных объектов
Способ обнаружения малозаметных подвижных объектов

