СИСТЕМА УПРАВЛЕНИЯ БОЕВОЙ РОБОТИЗИРОВАННОЙ ПЛАТФОРМОЙ
Вид РИД
Изобретение
Изобретение относится к информационно-вычислительным системам и устройствам, обеспечивающим решение задач дистанционного управления движением подвижных объектов по заданному алгоритму в автоматическом и ручном режимах.
Известен программно-аппаратный комплекс (см. патент №246833801, МПК G01C 23/00, G06F 19/00, опубл. 27.11.12 г.), принятый за прототип. Программно-аппаратный комплекс топопривязчика содержит комплекс аппаратных средств бортовой цифровой вычислительной машины, устройства, обеспечивающие взаимосвязь с бортовым оборудованием, проведение вычислительных процессов и представление индикационно-управляющих параметров (пункт управления), программно-алгоритмические средства. Связь комплекса аппаратных средств бортовой цифровой вычислительной машины с бортовым оборудованием осуществляется через дополнительные согласующие модули: блок согласования, выполненный с возможностью обеспечения управления работой первичных навигационных датчиков (система топопривязки и навигации) и состоящий из центрального процессора, приемопередатчика интерфейса RS-232, приемопередатчика интерфейса радиального последовательного, модулей памяти, буферированного регистра разовых команд ввода-вывода и модуля питания, блок обработки данных, выполненный с возможностью приема информации от датчика температуры и измерителя цифрового атмосферного давления, ее преобразования и вычисления значения высоты, а также для выработки напряжения питания для датчиков и состоящий из четырех субблоков: контроллера, интерфейса, стабилизатора напряжения и инвертора. Программно-аппаратный комплекс дополнительно оснащен вспомогательной ЭВМ, выполняющей задачи по хранению, отображению, обработке информации. Комплекс программно-алгоритмических средств выполнен в виде специального программно-математического обеспечения, выполненного с возможностью решения прямой и обратной навигационных задач, комплексирования сигналов навигационных систем, работы с цифровыми электронными картами, поддержки интерфейса оператора, решения сервисных задач.
Недостатками прототипа являются:
- отсутствие возможности внедрения гибких алгоритмов управления;
- низкий уровень контроля «поведения» управляемого объекта;
- отсутствие возможности получать непрерывную многоканальную информацию, необходимую для управления движением и выполнения функциональных задач;
- ограниченные возможности по обработке и передаче информационных потоков;
- ограниченные возможности применения.
Предлагаемым изобретением решается задача по повышению эффективности и надежности системы управления боевой роботизированной платформы.
Технический результат, получаемый при осуществлении изобретения, заключается в создании системы управления боевой роботизированной платформой, обеспечивающей движение платформы по заданному алгоритму в ручном и автоматическом режимах, решение задач топопривязки и навигации, управление приводами шасси, телекодовый обмен видеоинформацией платформы с пунктом дистанционного управления.
Указанный технический результат достигается тем, что в предлагаемой системе управления боевой роботизированной платформой, содержащей управляющую ЭВМ, пункт управления, функциональные подсистемы, аппаратные средства, навигационное оборудование, датчики, устройства связи, систему электропитания, согласующие устройства, новым является то, что система управления в части информационно-управляющего обеспечения имеет структуру типа «звезда», центральным элементом системы управления является управляющая ЭВМ, обеспечивающая контроль и управление всеми подсистемами платформы и имеющая интерфейс Ethernet, дополнительно управляющая ЭВМ выполнена с возможностью по интерфейсу Ethernet контроля напряжения, тока, выхода из строя отдельных элементов и управления началом заряда аккумуляторных батарей, система топопривязки и навигации выполнена с возможностью реализации всех навигационных вычислений в центральной управляющей ЭВМ, средства связи выполнены в виде подсистемы связи и передачи данных, имеющей два независимых канала: канал телекодового обмена пункта управления с платформой и канал телекодового обмена видеоинформацией, который осуществляется посредством радиостанций с интерфейсом Ethernet, размещенных на платформе и пункте дистанционного управления, пункт дистанционного управления включает в себя рабочее место оператора, состоящее из стола, стула и укрытия, автономный источник электропитания, размещаемые приборы, центральным элементом которых является планшетная ЭВМ, пункт дистанционного управления дополнительно оснащен ручным пультом управления и антенно-фидерным устройством, функционально относящимся к подсистеме связи и передачи данных.
Структурная организация системы управления в части информационно-управляющего обеспечения по типу «звезда» позволяет:
- обеспечить простоту схемных решений при разработке;
- в конечном итоге, снизить стоимость и повысить надежность системы управления.
Выбор в качестве центрального элемента системы управления управляющей ЭВМ, обеспечивающей контроль, управление всеми подсистемами платформы и имеющей интерфейс Ethernet, позволяет:
- обеспечить программно-алгоритмическими средствами взаимодействие всех систем боевой роботизированной платформы;
- обеспечить бесперебойное функционирование системы связи и передачи данных;
- обеспечить необходимый скоростной режим информационного обмена.
Выполнение управляющей ЭВМ с возможностью по интерфейсу Ethernet контроля напряжения, тока, выхода из строя отдельных элементов и управления началом заряда аккумуляторных батарей позволяет:
- постоянно в автоматическом режиме тестировать систему электропитания;
- поддерживать аккумуляторные батареи в заряженном состоянии;
- продлить срок службы системы электропитания.
Выполнение системы топопривязки и навигации с возможностью реализации всех навигационных вычислений в центральной управляющей ЭВМ позволяет:
- реализовать комплексированный режим навигации с использованием данных от различных источников;
- реализовать наиболее современные алгоритмы навигации.
Выполнение средств связи в виде подсистемы связи и передачи данных позволяет:
- организовать два независимых канала телекодового обмена информацией;
- производить управление параметрами обмена данными.
Включение в состав пункта дистанционного управления рабочего места оператора, источника автономного электропитания позволяет:
- обеспечить необходимые условия для работы оператора в полевых условиях;
- разместить необходимый приборный состав;
- обеспечить автономность функционирования пункта дистанционного управления.
Выбор в качестве центрального элемента пункта дистанционного управления планшетной ЭВМ позволяет:
- в короткое время развернуть пункт дистанционного управления;
- обеспечить компактность рабочего места оператора;
- отображать всю информацию, идущую от платформы.
Оснащение пункта дистанционного управления ручным пультом управления позволяет:
- выполнять управление платформой в ручном режиме;
- выполнять управление платформой в технологическом режиме при непосредственном подключении к платформе.
Оснащение пункта дистанционного управления антенно-фидерным устройством позволяет:
- повысить устойчивость прохождения радиосигнала по каналам связи;
- повысить дальность радиозахвата.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
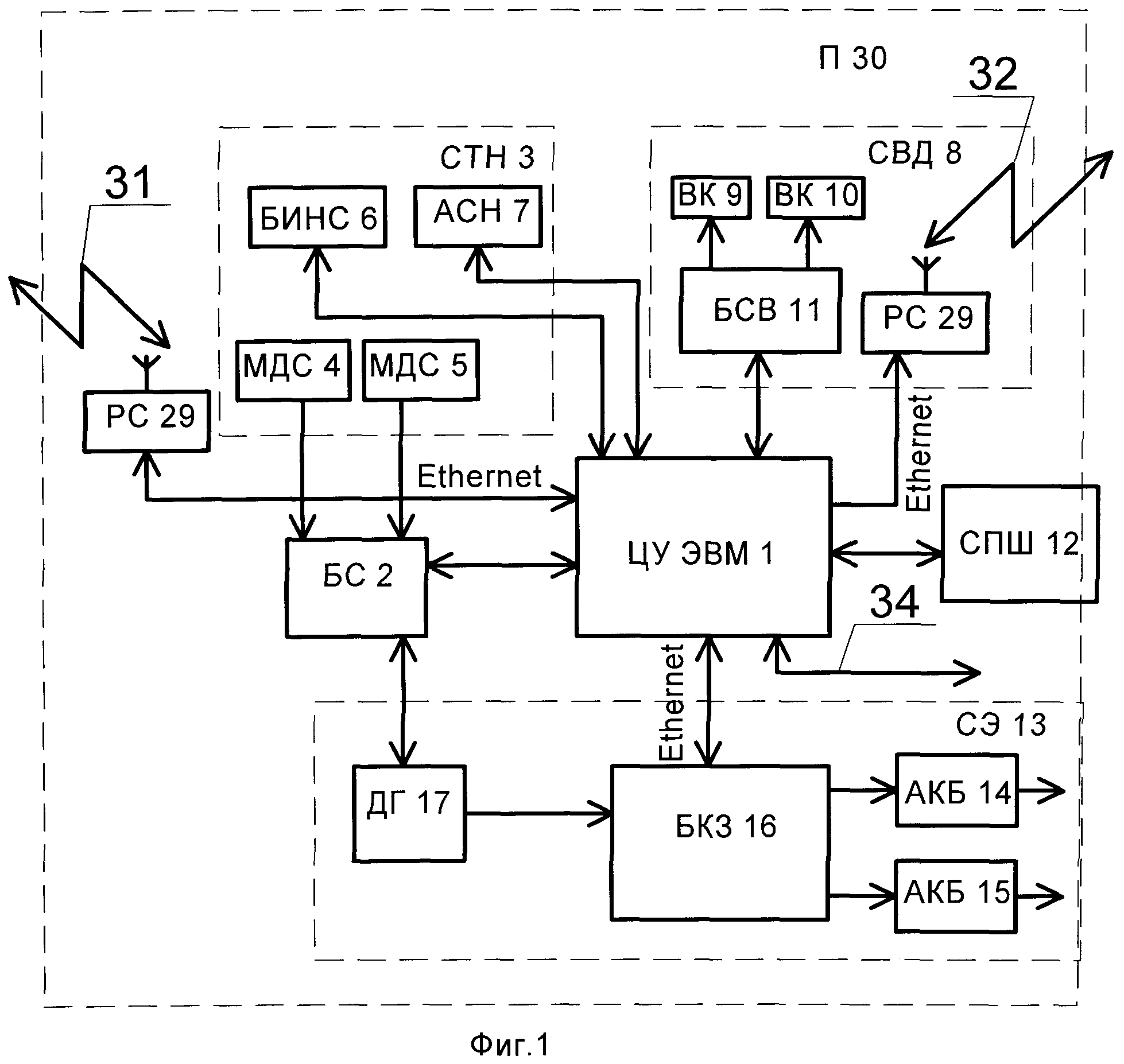
Сущность изобретения поясняется чертежами, где на фиг.1 показана структурная схема части системы управления боевой роботизированной платформой, размещаемой на платформе; на фиг.2 - структурная схема части системы управления боевой роботизированной платформой, размещаемой на пункте дистанционного управления.
Система управления боевой роботизированной платформой состоит из центральной управляющей ЭВМ (ЦУ ЭВМ) 1, блока сопряжения (БС) 2, системы топопривязки и навигации (СТН) 3, включающей механические датчики скорости (МДС) 4 и 5, бесплатформенную инерциальную навигационную систему (БИНС) 6, аппаратуру спутниковой навигации (АСН) 7, системы видеонаблюдения движения (СВД) 8, включающей видеокамеры (ВК) 9 и 10, блок сопряжения с видеокамерами (БСВ) 11, системы привода шасси (СПШ) 12, системы электропитания (СЭ) 13, включающей аккумуляторные батареи (АКБ) 14 и 15, блок контроля заряда аккумуляторных батарей (БКЗ) 16, дизель-генератор (ДГ) 17, пункта дистанционного управления (ПДУ) 18. ПДУ 18 включает рабочее место оператора (РМО) 19, содержащее стол 20, укрытие 21 и стул 22, планшетную ЭВМ (ПлЭВМ) 23, ручной пульт управления (РПУ) 24, автономный источник электропитания (АИЭ) 25, состоящий из дизель-генератора (ДГ) 26, блока контроля заряда (БКЗ) 27, аккумуляторной батареи (АКБ) 28. Подсистема связи и передачи данных состоит из трех радиостанций (PC) 29, две из которых размещены на платформе (П) 30, а одна - на ПДУ 18, с помощью которых организованы два независимых канала телекодового обмена 31 и 32. На ПДУ 18 также развернуто антенно-фидерное устройство (АФУ) 33. Кроме того, П 30 и ПДУ 18 связаны технологическим каналом связи 34.
Система управления боевой роботизированной платформой функционирует следующим образом. Система управления боевой роботизированной платформой выполняет функции обеспечения движения П 30 по заданному алгоритму в автоматическом и ручном режимах управления, обеспечивает контроль СЭ 13. Система управления в части информационного обеспечения имеет структуру типа «звезда». Центральным элементом системы управления является ЦУ ЭВМ 1, обеспечивающая контроль и управление всеми подсистемами: СТН 3, СВД 8, СПШ 12, СЭ 13, подсистема связи и передачи данных.
Функцией СТН 3 является определение географических координат местоположения П 30, автономное ориентирование и определение углового положения в пространстве. Большинство разработчиков БИНС 6 все алгоритмы по навигации и топопривязке реализуют во встроенном вычислителе, замыкая при этом интерфейсы датчикового оборудования (МДС 4 и 5, АСН 7). Однако такая схема имеет недостаток, заключающийся в том, что обычно разработчик БИНС 6 не обладает современными алгоритмами навигации. Поэтому все навигационные вычисления в СТН 3 для П 30 реализованы в ЦУ ЭВМ 1.
Для обеспечения нормального функционирования СЭ 13 с БКЗ 16 по интерфейсу Ethernet производится контроль напряжения (и как следствие уровня заряда), тока и выхода из строя отдельных элементов АКБ 14 и 15, а также производится управление началом заряда.
ПДУ 18 при выполнении боевых или учебных задач развертывается в полевых условиях. ПлЭВМ 23, PC 29 размещаются на столе 20, оператор - на стуле 22, для маскировки и защиты от осадков или солнечного излучения устанавливается укрытие 21. Для обеспечения устойчивой радиосвязи в непосредственной близости от РМО 19 устанавливается АФУ 33. РПУ 24 предназначен для управления ПЗО в ручном режиме, а также в технологическом режиме при непосредственном подключении к П 30 (например, самостоятельный выезд ВР из машины транспортирования). Основное управление П 30 осуществляется с помощью ПлЭВМ 23, на которой также отображается вся информация, идущая от П 30.
Питание ПДУ 18 автономное от АКБ 28, дополнительно для обеспечения длительного времени работы ПДУ 18 и зарядки АКБ 28 используется ДГ 26.
Подсистема связи и передачи данных представлена двумя независимыми каналами:
- канал 31 телекодового обмена ПДУ 18 с П 30;
- канал 32 телекодового обмена видеоинформации от ВНД 8.
Телекодовой обмен П 30 с ПДУ 18 осуществляется посредством PC 29. Указанная радиостанция имеет интерфейс Ethernet, позволяющий производить полное управление такими параметрами как настройка радиоданных (частота, режим канала), мощность излучения, параметры маскирования данных и т.д., а также осуществлять непосредственный обмен данными. Видеосигнал с помощью БС 2 с ВК 9 и 10 преобразуется в цифровой сигнал, упаковывается и передается по каналу Ethernet в ЦУ ЭВМ 1. После дополнительной обработки видеоданные также по каналу Ethernet передаются во вторую PC 29.
При этом одной из основных задач ПДУ 18 является отслеживание положения П 30 на фоне электронной карты местности (ЭКМ).
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании системы управления боевой роботизированной платформой, обеспечивающей движение платформы по заданному алгоритму в ручном и автоматическом режимах, решение задач топопривязки и навигации, управление приводами шасси, телекодовый обмен видеоинформацией платформы с пунктом дистанционного управления.
Система управления боевой роботизированной платформой, содержащая управляющую ЭВМ, пункт управления, функциональные подсистемы, аппаратные средства, навигационное оборудование, датчики, устройства связи, систему электропитания, согласующие устройства, отличающаяся тем, что система управления в части информационно-управляющего обеспечения имеет структуру типа «звезда», центральным элементом системы управления является управляющая ЭВМ, обеспечивающая контроль и управление всеми подсистемами платформы и имеющая интерфейс Ethernet, дополнительно управляющая ЭВМ выполнена с возможностью по интерфейсу Ethernet контроля напряжения, тока, выхода из строя отдельных элементов и управления началом заряда аккумуляторных батарей, система топопривязки и навигации выполнена с возможностью реализации всех навигационных вычислений в центральной управляющей ЭВМ, средства связи выполнены в виде подсистемы связи и передачи данных, имеющей два независимых канала: канал телекодового обмена пункта управления с платформой и канал телекодового обмена видеоинформацией, который осуществляется посредством радиостанций с интерфейсом Ethernet, размещенных на платформе и пункте дистанционного управления, пункт дистанционного управления включает в себя рабочее место оператора, состоящее из стола, стула и укрытия, автономный источник электропитания, размещаемые приборы, центральным элементом которых является планшетная ЭВМ, пункт дистанционного управления дополнительно оснащен ручным пультом управления и антенно-фидерным устройством, функционально относящимся к подсистеме связи и передачи данных.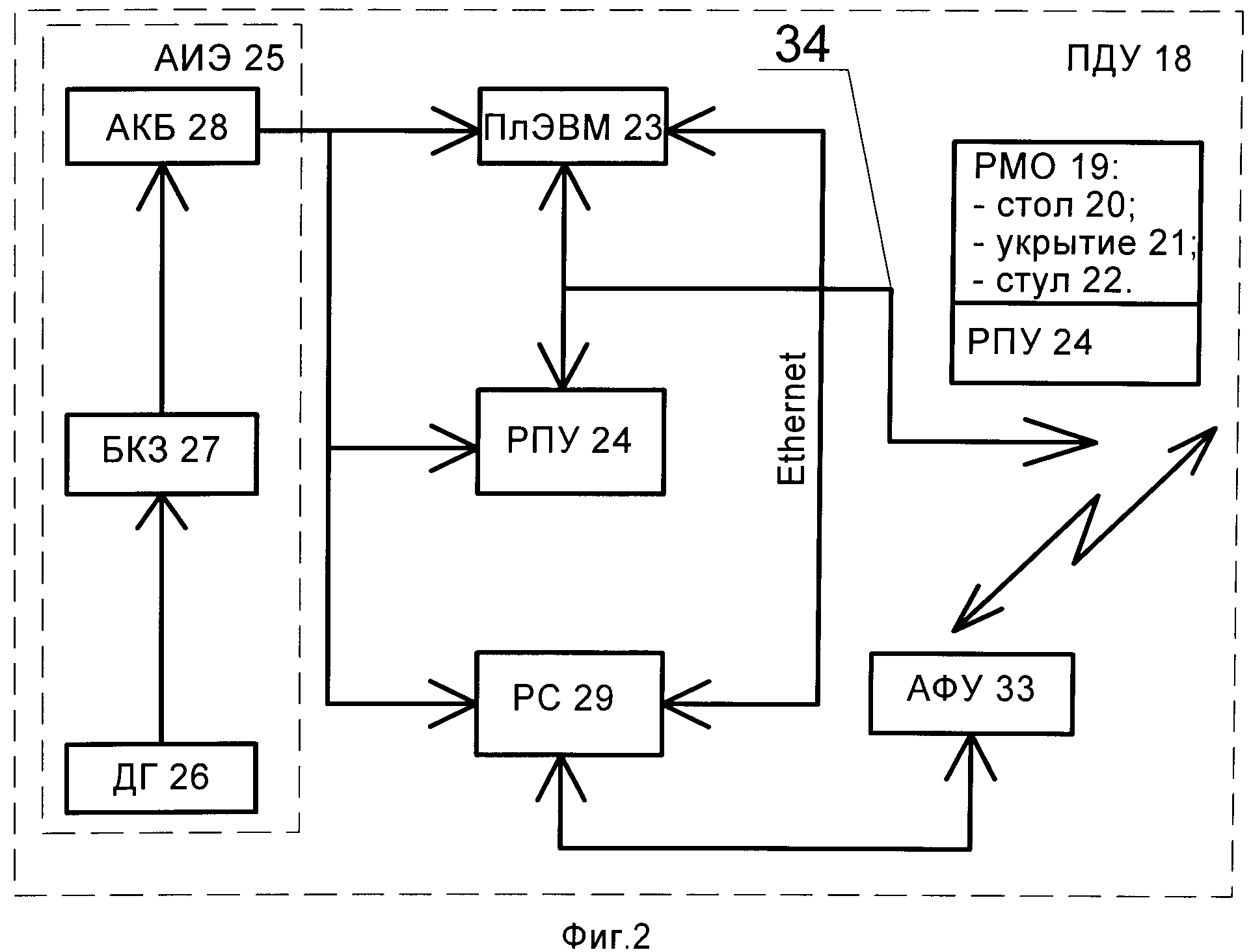
Полка для установки в кузове-фургоне транспортного средства
Способ изготовления ствола и устройство для его реализации
Способ доработки и оснащения серийного транспортного средства
Станок автоматического оружия
Тумбовая оружейная установка
Способ изготовления нарезного ствола
Катапульта для взлета летательного аппарата
Ствол автоматического стрелкового оружия, изготовленный методом холодного радиального обжатия, и способ его местной закалки
Стрелковое оружие
Способ функционирования системы топопривязки и навигации в условиях боевого применения
Полка для установки в кузове-фургоне транспортного средства
Способ изготовления ствола и устройство для его реализации
Способ доработки и оснащения серийного транспортного средства
Станок автоматического оружия
Тумбовая оружейная установка
Способ изготовления нарезного ствола
Катапульта для взлета летательного аппарата
Ствол автоматического стрелкового оружия, изготовленный методом холодного радиального обжатия, и способ его местной закалки
Стрелковое оружие
Способ функционирования системы топопривязки и навигации в условиях боевого применения

