Результат интеллектуальной деятельности: СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД
Вид РИД
Изобретение
Изобретение относится к стрелочным электроприводам железнодорожной автоматики и телемеханики и предназначено для перевода, замыкания и контроля положения остряков на железнодорожном транспорте и метрополитене.
Известны стрелочные электроприводы, содержащие смонтированные в общем корпусе электродвигатель, понижающий многоступенчатый механический редуктор с фрикционной муфтой сцепления, главный вал с шестерней, находящийся в реечном зацеплении с рабочим шибером, автопереключателем ножевого типа, контрольными линейками, элементом обогрева [1].
Наряду с известными достоинствами, эти устройства обладают рядом недостатков, обусловленных сложностью конструкции, наличием большого числа быстровращающихся узлов и деталей, элементов скольжения, требующих интенсивной смазки, имеющих повышенный износ, вероятность заклинивания шибера и других элементов и, как следствие, низкая надежность, малый ресурс работы электропривода, не позволяют проводить механизированную подбивку пути в зоне установки электропривода, высокие эксплуатационные затраты.
Известны также стрелочные электроприводы, где в качестве силового механизма применяются винтовые пары [2, 3], преобразующие вращательное движение в поступательное. Однако в полной мере они не исключают вышеперечисленные недостатки, приводящие иногда к опасным отказам.
Целью настоящего изобретения является устранение указанных недостатков, упрощение конструкции, расширение области применения, унификации стрелочных электроприводов, сокращение эксплуатационных расходов, повышение надежности, обеспечение возможности проводить сплошную механизированную подбивку пути, в том числе и в зоне установки электропривода, увеличения срока службы и безопасности движения поездов.
Указанная цель достигается следующими техническими решениями:
- созданием изделия модульного типа;
- установкой модуля замыкания и контроля шибера внутри колеи пути;
- наличием специального торсионного вала, предающего вращательное движение от электросилового модуля (ЭСМ) на модуль замыкания и контроля (МЗК);
- созданием механической системы с двухконтурным замыканием и удержанием остряков;
- наличием трехэлементного механизма замыкания шибера в крайних положениях кулачкового типа симметричной установки с дублированием каналов замыкания шибера;
- конструкцией контрольной системы следящего типа, построенной на принципе независимого контроля остряков стрелки и механизма замыкания шибера.
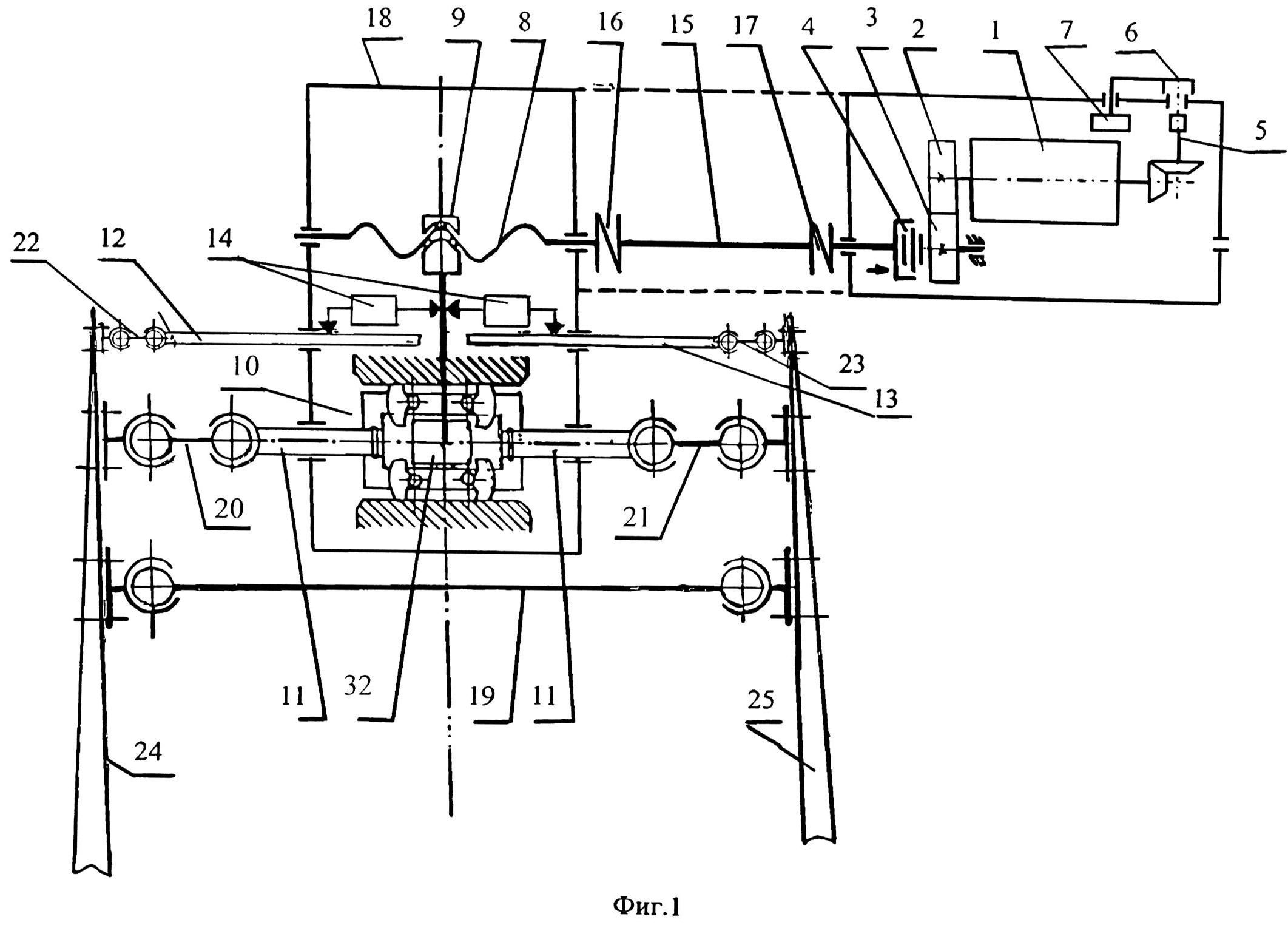
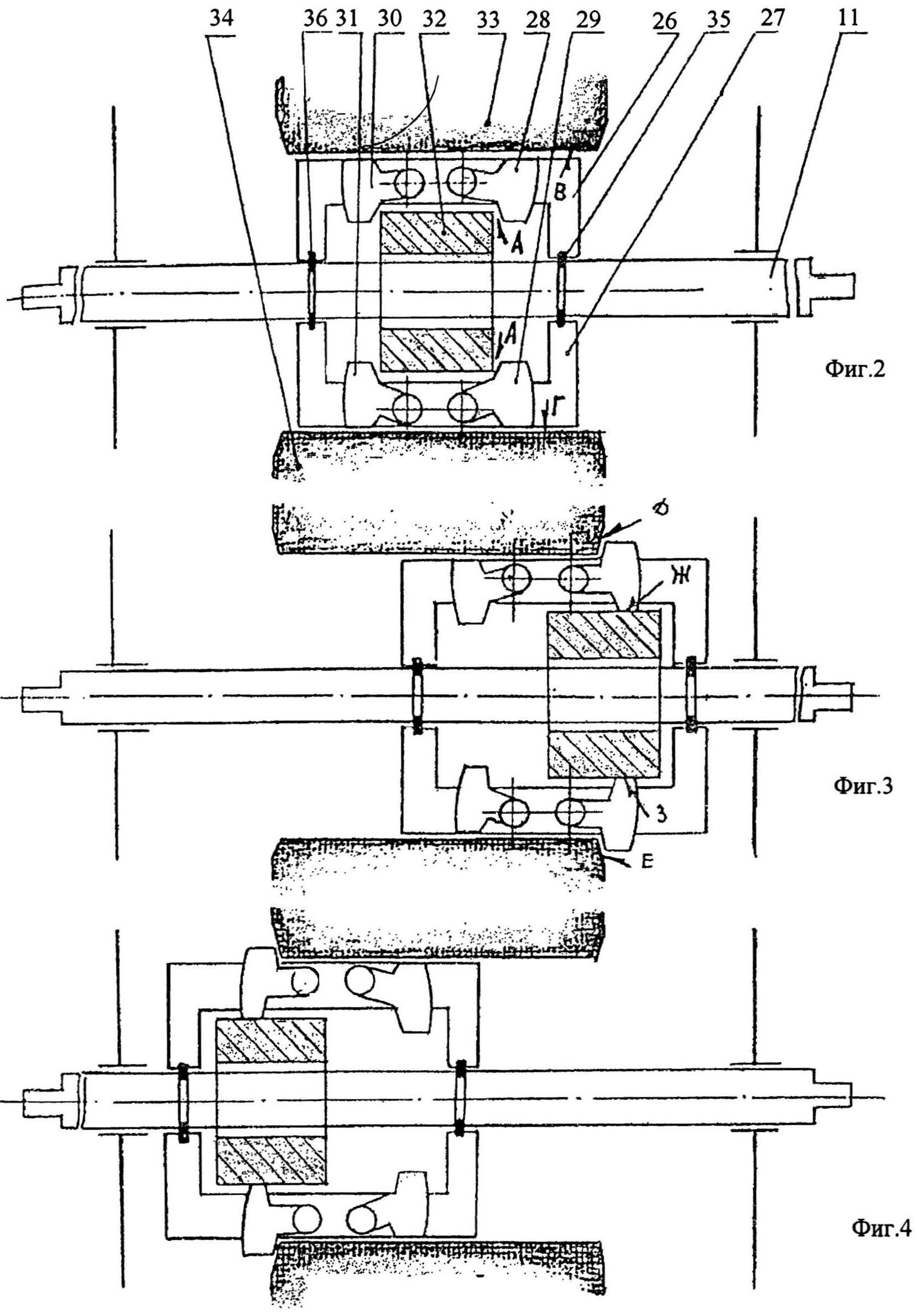
На фигуре 1 изображена кинематическая схема стрелочного электропривода; на фигуре 2, 3, 4 - механизм замыкания шибера в работе и его крайних положениях.
Стрелочный электропривод (фиг.1) содержит ЭСМ, состоящий из электродвигателя 1, одноступенчатого цилиндрического редуктора, состоящего из ведущего зубчатого колеса 2 и ведомого зубчатого колеса 3, на выходной конец вала которого установлена фрикционная металлокерамическая муфта 4, устройства ручного перевода стрелки 5, курбельной заслонки 5 и контактов безопасности 7, МЗК, состоящий из шарико-винтовой пары качения 8, 9, механизм замыкания 10 шибера 11, автопереключателя, состоящего из контрольных линеек 12, 13 и датчиков 14. Механическая связь между ЭСМ и МЗК осуществляется посредством торсионного вала и двух кулачковых муфт 16, 17, соединяющих выходной вал от фрикционной муфты 4 с входным валом винта шарико-винтовой пары качения. Узлы и детали стрелочного электропривода собраны в корпусе 18, представляющий собой полый металлический брус. Электропривод укомплектован также межостряковой соединительной тягой 19 и сочленениями (тягами) рабочими 20, 21 и контрольными 22, 23, имеющими шарнирные кинематические связи с остряками 24 и 25 стрелочного перевода и соответственно с шибером 11 и контрольными линейками 12 и 13.
Механизм замыкания шибера (фиг.2, 3, 4) состоит из самого шибера 11 круглого сечения, корпуса замка 26, 27, который удерживает симметрично две пары кулачков 28, 29, 30, 31 и шибер 11 в единой подвижной конструкции, толкателя 32, имеющего жесткую связь с гайкой 9 шарико-винтовой пары качения (фиг.1), двух упоров 33, 34, установленных в корпусе МЗК. Шибер 11 с корпусом 26, 27 скреплен вставками 35, 36.
Сопоставительный анализ показывает, что указанные отличия заявленного устройства от прототипа представляют ряд новых признаков, что обуславливает его критерию «новизна».
В патентной и научно-технической литературе решений со сходными отличительными признаками не обнаружено. В связи с этим, делается вывод о соответствии заявлению изобретения критерию «существенные отличия».
Работает стрелочный электропривод следующим образом.
При вращении ротора электродвигателя 1 (фиг.1) посредством одноступенчатого редуктора 2, 3 и фрикционной муфты 4, кулачковой муфты 16, торсионного вала 15 и второй кулачковой муфты 17 вращение передается на винт 8 шарико-винтовой пары качения, где вращательное движение винта 8 преобразуется в поступательное движение гайки 9 вдоль винта. Гайка 9 кинематически связана с механизмом замыкания 10 шибера 11. При поступательном движении гайки 9 толкатель 32 (фиг.2) движется поступательно слева направо, упирается в кулачки 28 и 29 в точке «А», пытаясь повернуть их на своей оси. Однако этому препятствуют упоры 33 и 34, в поверхность «В» и «Г» которых упираются они (кулачки). Поступательное движение толкателя 32 приводит к поступательному движению кулачков 28 и 29, закрепленных в корпусе 26 и 27 механизма замыкания шибера и соответственно шибер 11. В конце перевода кулачки 28, 29 выходят за пределы поверхности «В» и «Г» упоров 33 и 34, поворачиваются на своей оси под действием толкателя 32 и входят в контакт с этими же упорами поверхностями «Д» и «Е» (фиг.3), а толкатель замыкает место, контактируя с поверхностью кулачков «Ж» и «З», и тем самым замыкает их. Шибер заперт в крайнем правом положении.
Для того чтобы осуществлялся перевод шибера в другое крайнее положение (фиг.4), необходимо толкателю 32 двигаться справа налево до упора о кулачки 30 и 31, освободив кулачки 28 и 29 для поворота и тем самым разомкнув шибер. Дальнейший процесс перевода и замыкания шибера идет аналогично предшествующему.
Контрольная система отключает датчиками 14 (фиг.1) электродвигатель 1 при полном переводе стрелки и замыкании шибера 11, получая эту информацию от остряков посредством контрольных линеек 12, 13 и положения толкателя 32.
Таким образом, в описываемом стрелочном электроприводе, представляющем конструкцию, расположенную в полом металлическом брусе и, благодаря применению ШВП качения, механизма замыкания шибера кулачкового типа симметричной установки, конструкции контрольной системы следящего типа, построенной на принципе независимого контроля остряков стрелки с составными контрольными линейками, и механизма замыкания шибера в крайних положениях кулачкового трехэлементного типа симметричной установки с дублированием каналов замыкания шибера, наличию дополнительной межостряковой соединительной тяги, образующей двухконтурное замыкание и удержание остряков, упрощается конструкция электропривода, позволяющая расширить область его применения, унификацию, и позволяющая проводить сплошную механизированную подбивку пути, в том числе и в зоне установки электропривода, снизить эксплуатационные расходы, повысить его надежность, срок службы и безопасность движения поездов
Источники информации.
1. Резников Ю.М. Электроприводы железнодорожной автоматики и телемеханики. М.: Транспорт, 1985, с. 83-95, рис. 21-27.
2. Авторское свидетельство №1837026 А1, кл. B61L 5/06 (СССР).
3. Патент SU 1837026 А1, 30.081993, B61L 5/06.
Система цифровой оперативно-технологической связи железнодорожного транспорта
Система контроля поверхности катания железнодорожной колесной пары
Секция газотурбовоза
Способ технического обслуживания и текущего ремонта подвижного состава железнодорожного транспорта
Способ контроля технологического процесса опробования тормозов подвижного состава железных дорог
Смеситель-испаритель для топливных систем газотурбовозов
Вагон - насосная станция пожарного поезда
Межсекционное соединение криогенных систем газотурбовоза
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации
Устройство построения энергосберегающих графиков движения поездов
Система цифровой оперативно-технологической связи железнодорожного транспорта
Система контроля поверхности катания железнодорожной колесной пары
Секция газотурбовоза
Способ технического обслуживания и текущего ремонта подвижного состава железнодорожного транспорта
Способ контроля технологического процесса опробования тормозов подвижного состава железных дорог
Смеситель-испаритель для топливных систем газотурбовозов
Вагон - насосная станция пожарного поезда
Межсекционное соединение криогенных систем газотурбовоза
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации
Устройство построения энергосберегающих графиков движения поездов

