Результат интеллектуальной деятельности: ГИРОКОМПАС
Вид РИД
Изобретение
Изобретение относится к гироскопическим приборам для навигации, геодезии, измерения азимута на земной поверхности.
Известен гирокомпас (см. свидельство на полезную модель RU 30971 U1, опубл. 10.07.2003 г.), принятый за прототип. Гирокомпас содержит корпус, платформу, установленную в подшипниках корпуса, первый и второй датчики угловой скорости, закрепленные на платформе, датчик угла и приводной двигатель, размещенные на оси подвеса платформы, и индикаторный прибор. В систему управления гирокомпаса введены последовательно соединенные блок разности и вычислительный блок, первый и второй входы блока разности подключены к выходам первого и второго датчика угловой скорости соответственно, а выход вычислительного блока подключен к первому входу индикаторного прибора, второй вход которого подключен к выходу датчика угла (горизонта). Первый и второй датчики угловой скорости выполнены в виде микромеханических гироскопов.
Недостатками устройства, принятого за прототип, являются:
- высокая сложность и трудоемкость изготовления устройства;
- недостаточная метрологическая точность определения углового положения при наличии высоких затрат на изготовление.
Предлагаемым изобретением решается задача по упрощению конструкции гирокомпаса при наличии возможности получения высоких точностных характеристик.
Технический результат, получаемый при осуществлении изобретения, заключается в создании с минимальными затратами измерительного прибора, предназначенного для использования в различных областях техники с целью измерения и контроля углового положения в инерциальном пространстве.
Указанный технический результат достигается тем, что в предлагаемом гирокомпасе, содержащем корпус, платформу, датчик угловой скорости в виде гироскопа, закрепленного на платформе, датчик горизонта, приводной двигатель, систему управления гирокомпаса, новым является то, что в качестве датчика угловой скорости применяется волоконно-оптический гироскоп, установленный на поворотной платформе и через интерфейс RS-485 информационно связанный с внешней ЭВМ типа «ноутбук», горизонтирование платформы с волоконно-оптическим гироскопом осуществляется посредством линейных шаговых микродвигателей, механически связанных с платформами типа карданов подвес и выполненных с возможностью углового перемещения относительно друг друга в перпендикулярных относительно друг друга плоскостях вращения, вращение отгоризонтированного датчика угловой скорости вокруг своей оси до угловой фиксации оптическим прибором ориентира на местности осуществляется через червячный редуктор от приводного шагового двигателя, электрически шаговые двигатели через блоки управления, USB-разветвитель связаны с внешней ЭВМ, обработка внешней ЭВМ данных с датчиков горизонта - акселерометров осуществляется через малогабаритный, многофункциональный USB-модуль АЦП/ЦАП с функциями цифрового ввода-вывода.
Применение в качестве датчика угловой скорости волоконно-оптического гироскопа, установленного на поворотной платформе, через интерфейс RS-485 информационно связанного с внешней ЭВМ типа «ноутбук», позволяет:
- обеспечить простоту схемных решений и снизить себестоимость изделия;
- упростить кинематическую схему гирокомпаса;
- высокопроизводительно производить обработку поступающей информации;
- достигнуть достаточной точности определяемых параметров без усложнения конструкции.
Осуществление горизонтирования волоконно-оптического гироскопа посредством линейных шаговых микродвигателей, механически связанных с платформами типа карданов подвес, позволяет:
- значительно упростить классическую схему и, соответственно, конструкцию гирокомпаса;
- снизить затраты на его разработку и изготовление.
Осуществление вращения отгоризонтированного датчика угловой скорости вокруг своей оси до угловой фиксации оптическим прибором ориентира на местности через червячный редуктор от приводного шагового двигателя позволяет:
- обеспечить определение истинных азимутов ориентирных направлений в диапазоне широт ±70°;
- исключить наличие высоких скоростей и обеспечить энергетический и информационный обмен между аппаратными средствами, размещенными на неподвижных и вращающихся частях гирокомпаса без применения контактных токосъемных устройств.
Обеспечение электрической связи шаговых двигателей через блоки управления, USB-разветвитель с внешней ЭВМ позволяет:
- своевременно выдавать управляющие сигналы на исполнительные устройства;
- программно организовать в штатном режиме работу гирокомпаса;
- исключить за счет программных средств погрешности в механических передачах.
Осуществление обработки внешней ЭВМ данных с датчиков горизонта - акселерометров через малогабаритный, многофункциональный USB-модуль АЦП/ЦАП с функциями цифрового ввода-вывода позволяет:
- обеспечить гибкие возможности задания количества опрашиваемых каналов, последовательности опроса каналов, поддиапазона на каждом канале;
- обеспечить программное управление разрешения АЦП;
- обеспечить возможность обновления программы через USB;
- получить малый габарит корпуса гирокомпаса.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежом, где показана структурная схема гирокомпаса.
Гирокомпас содержит датчик угловой скорости, выполненный в виде волоконно-оптического гироскопа (ВОГ) 1, поворотную платформу (ПП) 2, внешнюю ЭВМ 3 типа «ноутбук», линейные шаговые микродвигатели (ЛШД) 4 и 5, механически связанные с платформами (П) 6 и 7 типа карданов подвес, выполненными с возможностью углового перемещения относительно друг друга в перпендикулярных относительно друг друга плоскостях вращения, оптический прибор (ОП) 8, жестко связанный с ПП 2, червячный редуктор (ЧР) 9 и связанный с ним приводной шаговый двигатель (ПШД) 10, которые установлены на неподвижном корпусе (К) 11. Электрически ЛШД 4 и 5, ПШД 10 через блоки управления (БУ) 12, 13 и 14, USB-разветвитель 15 связаны с внешней ЭВМ 3. С внешней ЭВМ 3 через малогабаритный, многофункциональный USB-модуль АЦП/ЦАП 16 связаны датчики горизонта - акселерометры (А) 17 и 18, установленные на П 6 и 7. ВОГ 1 через интерфейс RS-485 информационно связан с внешней ЭВМ 3.
Гирокомпас функционирует следующим образом. С помощью линейных шаговых двигателей (ЛШД) 4 и 5, обеспечивающих наклон платформ (П) 6 и 7, закрепленных в кардановом подвесе в двух плоскостях, внешняя управляющая ЭВМ 3, постоянно получая данные от акселерометров (А) 17 и 18 через высокоточное АЦП/ЦАП 16 по каналу USB о величине наклона платформ 4 и 5 относительно горизонтальной плоскости Земли, производит подачу сигналов на блоки управления (БУ) 12 и 13 шаговыми двигателями до момента пока наклон платформ относительно горизонтальной плоскости Земли не станет равным нулю. Затем управляющая ЭВМ 3 по каналу RS-485 в течение заданного времени производит постоянное измерение и фильтрацию скорости вращения Земли, получаемую от ВОГ 1, для компенсации погрешностей ВОГ 1 подав сигнал на блок управления (БУ) 14 приводным шаговым двигателем (ПШД) 10 разворота поворотной платформы (ПП) 2. После чего происходит ее разворот на 180°. В этом положении управляющая ЭВМ 3 по каналу RS-485 в течение заданного времени производит постоянное измерение и фильтрацию скорости вращения Земли получаемую от ВОГ 1. После завершения измерения управляющая ЭВМ 3 производит расчет и компенсацию азимута (направления на север). Истинное значение азимута получают вычитанием постоянной ошибки (корпусная погрешность). Корпусная погрешность рассчитывается один раз путем ориентирования оптического прибора (ОП) 8 на удаленный объект с известным азимутом и проведения режима ориентирования гирокомпаса. Разница между истинным значением и результатом, полученным в результате ориентирования, и есть корпусная поправка, которая постоянна в диапазоне от 0° до 360° и учитывается при всех измерениях. Измерение скорости вращения Земли в двух разных положениях путем разворота ВОГ 1, установленного на горизонтальное основание, позволяет повысить точность определения азимута путем взаимной компенсации долгосрочно нестабильных системных погрешностей ВОГ 1 (например, температурная зависимость).
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании с минимальными затратами измерительного прибора, предназначенного для использования в различных областях техники с целью измерения и контроля углового положения в инерциальном пространстве.
Гирокомпас, содержащий корпус, платформу, датчик угловой скорости в виде гироскопа, закрепленного на платформе, датчик горизонта, приводной двигатель, систему управления гирокомпаса, отличающийся тем, что в качестве датчика угловой скорости применяется волоконно-оптический гироскоп, установленный на поворотной платформе и через интерфейс RS-485 информационно связанный с внешней ЭВМ типа «ноутбук», горизонтирование платформы с волоконно-оптическим гироскопом осуществляется посредством линейных шаговых микродвигателей, механически связанных с платформами типа карданов подвес и выполненных с возможностью углового перемещения относительно друг друга в перпендикулярных относительно друг друга плоскостях вращения, вращение отгоризонтированного датчика угловой скорости вокруг своей оси до угловой фиксации оптическим прибором ориентира на местности осуществляется через червячный редуктор от приводного шагового двигателя, электрически шаговые двигатели через блоки управления, USB-разветвитель связаны с внешней ЭВМ, обработка внешней ЭВМ данных с датчиков горизонта - акселерометров - осуществляется через малогабаритный, многофункциональный USB-модуль АЦП/ЦАП с функциями цифрового ввода-вывода.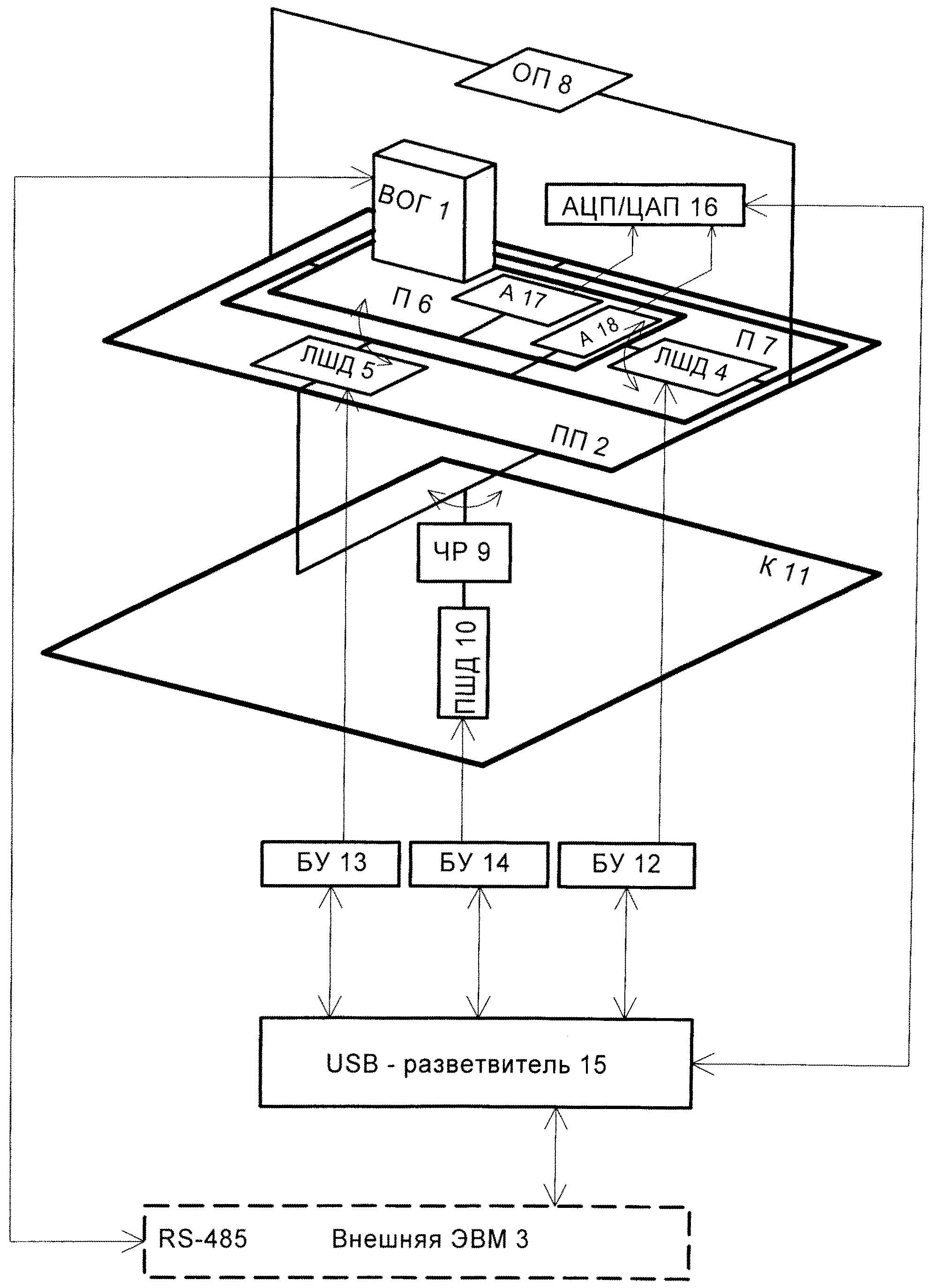
Робототехнический комплекс разведки и огневой поддержки
Надульник стрелкового оружия
Способ проведения испытаний боевого дистанционно-управляемого модуля
Переводчик-предохранитель
Оружие
Устройство для обжима полых осесимметричных изделий
Оружейная установка с прицельным устройством и способ его выверки
Ручной пулемет
Мишенный комплекс
Способ изготовления тонкостенных оболочек
Робототехнический комплекс разведки и огневой поддержки
Надульник стрелкового оружия
Способ проведения испытаний боевого дистанционно-управляемого модуля
Переводчик-предохранитель
Оружие
Устройство для обжима полых осесимметричных изделий
Оружейная установка с прицельным устройством и способ его выверки
Ручной пулемет
Мишенный комплекс
Способ изготовления тонкостенных оболочек

