Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОССТАНОВЛЕНИЯ ГЕОМЕТРИИ СКВАЖИНЫ ПО ИЗМЕРЕНИЯМ НИЗКОЧАСТОТНЫХ ЭЛЕКТРОМАГНИТНЫХ СИГНАЛОВ
Вид РИД
Изобретение
Уровень техники
Настоящее изобретение относится к способу и устройству для автоматического восстановления геометрии скважины по измерениям низкочастотных электромагнитных сигналов, а более конкретно, изобретение относится к способу и устройству для автоматического восстановления положений приемника и/или излучателя в целях выполнения межскважинной электромагнитной томографии.
Межскважинная электромагнитная томография является примером известного способа, который можно использовать для описания нефтяного коллектора. В этом способе электромагнитные волны обычно передают между двумя стволами скважин вблизи представляющего интерес нефтяного коллектора. Электромагнитные волны изменяются коллектором таким образом, что по изменению идентифицируют определенные свойства коллектора. Поэтому измерения электромагнитных волн, которые передают через коллектор, можно обрабатывать, чтобы получать двумерное или трехмерное изображение или снимок коллектора.
Типичное применение межскважинной электромагнитной томографии включает в себя использование приемного прибора, который спускают в один ствол скважины, и передающего прибора, который спускают в другой ствол скважины. Передающий прибор, как следует из его названия, излучает электромагнитные волны, а приемный прибор выполняет измерения результирующих принимаемых электромагнитных волн. Обычно межскважинная электромагнитная томография может включать в себя изменение положений приемного и излучающего приборов во время сбора данных измерений, так что конкретный результат измерения может быть сопоставлен с конкретным положением излучателя и конкретным положением приемника. После получения измерений можно провести межскважинное исследование на основе положений приемника и излучателя и данных измерений.
Проблема, возникающая при использовании межскважинной электромагнитной томографии, заключается в точном определении положений приемника и излучателя. Традиционные способы определения этих положений обычно включают в себя ручную аппроксимацию данных, для которой может затрачиваться большое количество времени.
Поэтому остается необходимость в лучших способах определения относительных положений приемников и/или излучателей, которые используются при межскважинной электромагнитной томографии.
Сущность изобретения
Согласно изобретению способ, который является пригодным к использованию в случае скважины, включает в себя создание модели для прогнозирования измерений, которые получают приемниками благодаря передачам с помощью источников, на основании оцененных положений приемников относительно источников. Все оцененные положения имеют по меньшей мере два измерения. По меньшей мере некоторые из источников и приемников располагают в скважине. На компьютере оцененные положения автоматически уточняют на основании прогнозированных измерений и фактических измерений, которые получают с помощью приемников.
В другом осуществлении изобретения на машиночитаемом носителе данных хранятся инструкции, которые при выполнении побуждают основанную на процессоре систему к созданию модели для прогнозирования измерений, которые получаются приемниками благодаря передачам с помощью источников, на основании оцененных положений приемников относительно источников. Все оцененные положения имеют по меньшей мере два измерения. По меньшей мере некоторые из приемников и источников расположены в скважине. Инструкции при выполнении побуждают основанную на процессе систему к автоматическому уточнению оцененных положений на основании сравнения прогнозированных измерений и фактических измерений, которые получаются с помощью приемников.
В еще одном осуществлении система, которая является пригодной к использованию в случае скважины, включает в себя модель для прогнозирования измерений, которые получаются приемниками благодаря передаче с помощью источников, на основании оцененных положений приемников относительно источников. Все оцененные положения имеют по меньшей мере два измерения. По меньшей мере некоторые из приемников и излучателей расположены в скважине. Система также включает в себя основанный на компьютере вычислитель для автоматического уточнения оцененных положений на основании сравнения прогнозированных измерений и фактических измерений, которые получаются с помощью приемников.
Преимущества и другие признаки изобретения станут очевидными из нижеследующих чертежей, описания и формулы изобретения.
Краткое описание чертежей
На чертежах:
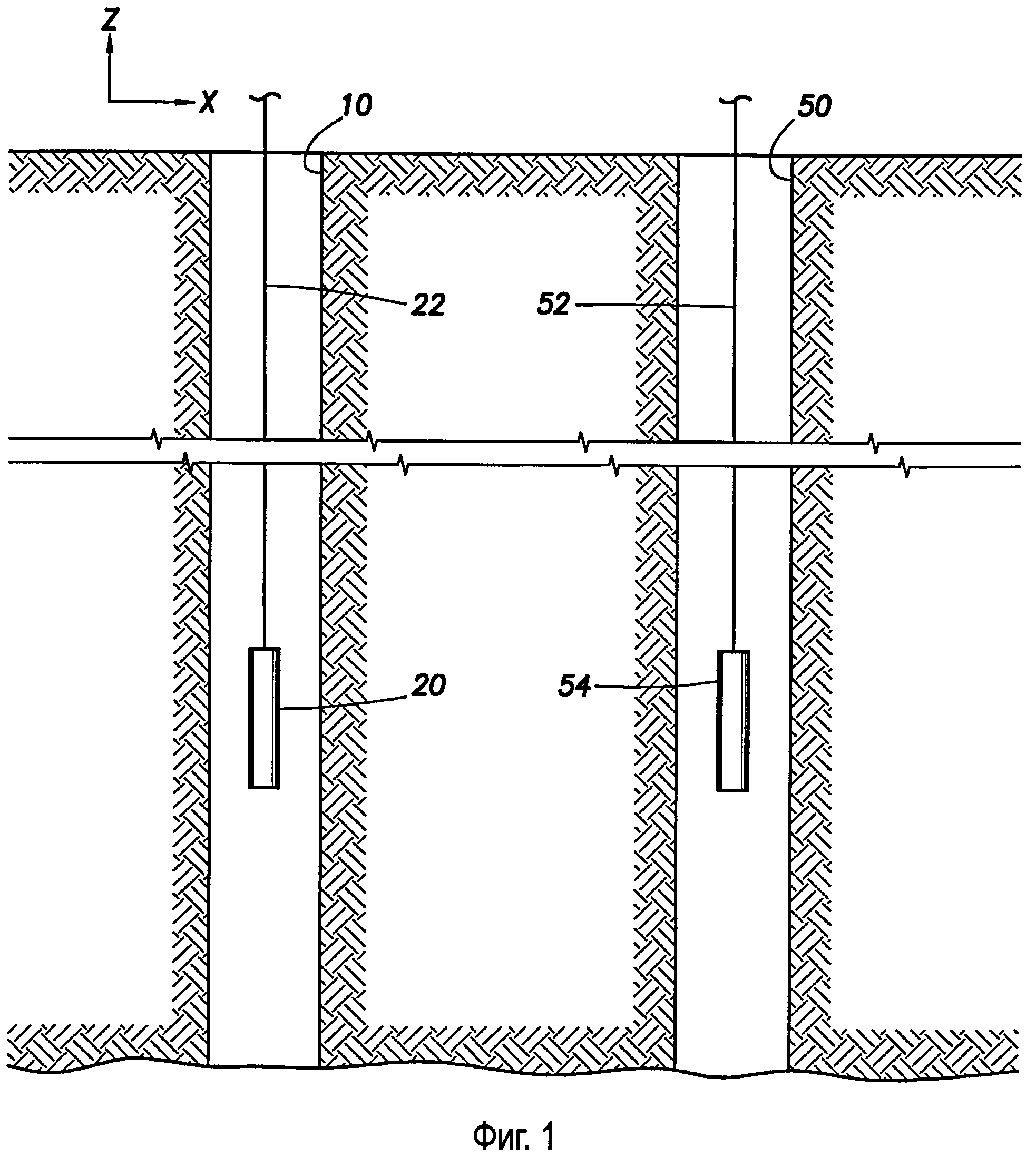
фиг.1 - схематический вид скважинного поля в соответствии с осуществлением изобретения;
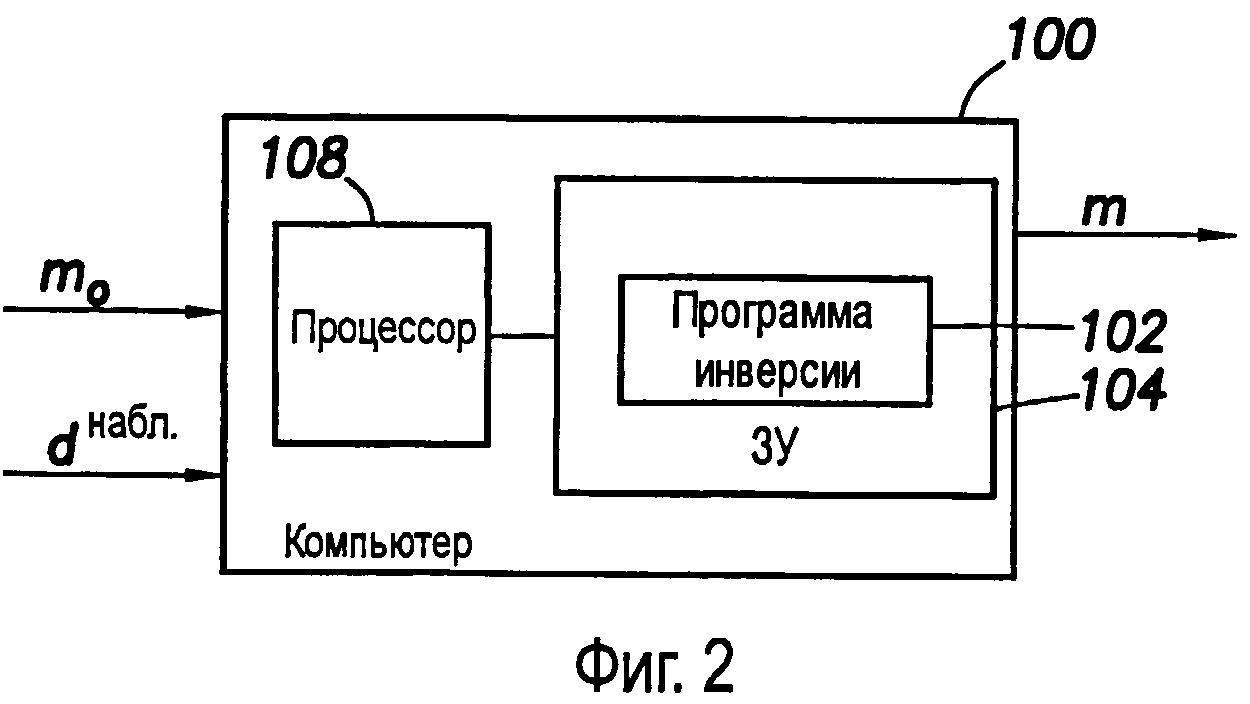
фиг.2 - структурная схема компьютера в соответствии с осуществлением изобретения;
фиг.3 - блок-схема последовательности операций, показывающая способ получения положений приемников, используемых при проведении межскважинного электромагнитного исследования, в соответствии с осуществлением изобретения;
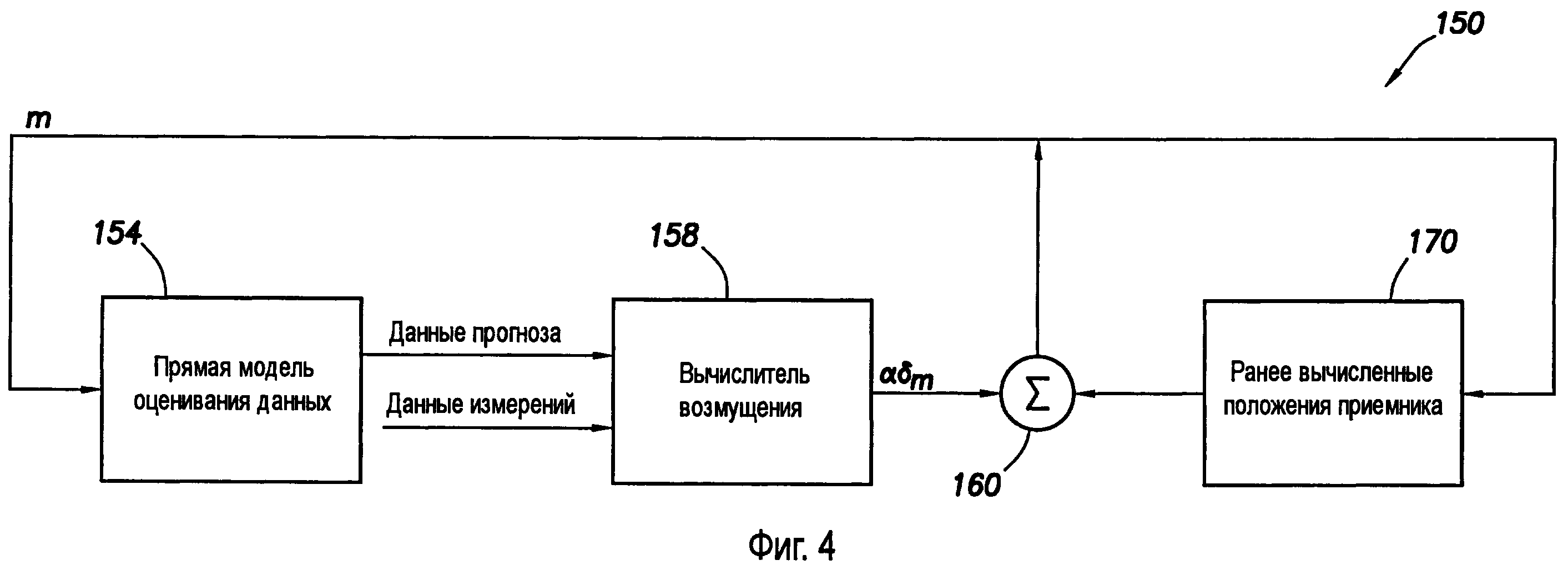
фиг.4 - блок-схема архитектуры программного обеспечения, предназначенной для получения положений приемника, в соответствии с осуществлением изобретения;
фиг.5 - схематическое представление примера имитированной скважины с показом фактической геометрии излучателя и приемника в соответствии с осуществлением изобретения;
фиг.6, 7, 8 и 9 - схематические представления, иллюстрирующие реализуемый компьютером способ инверсии для определения положений приемника в скважине из фиг.5, в соответствии с осуществлением изобретения;
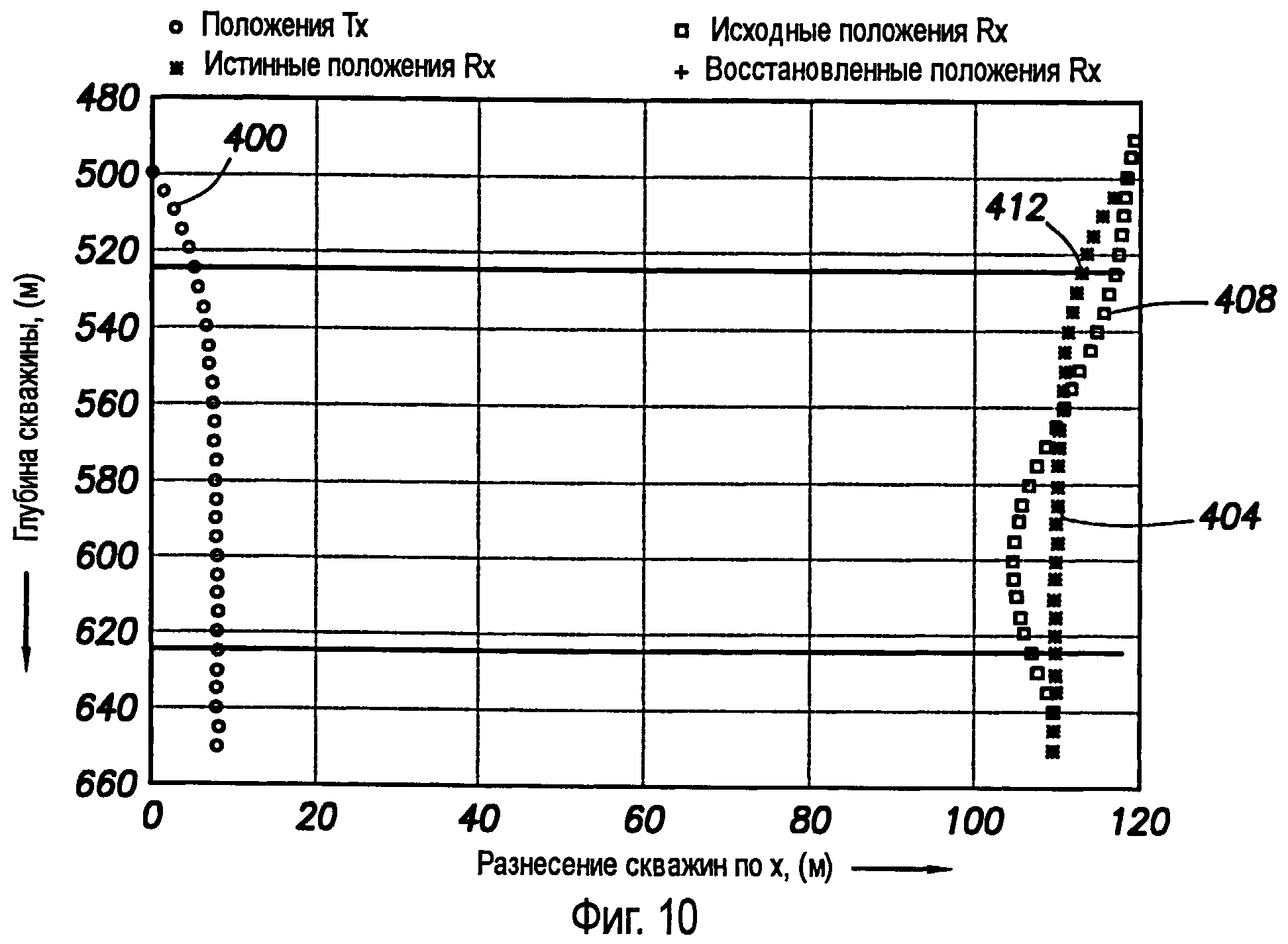
фиг.10 - другое схематическое представление скважины из фиг.5 с показом сравнения между фактической, исходной и конечной вычисленной геометриями в соответствии с осуществлением изобретения;
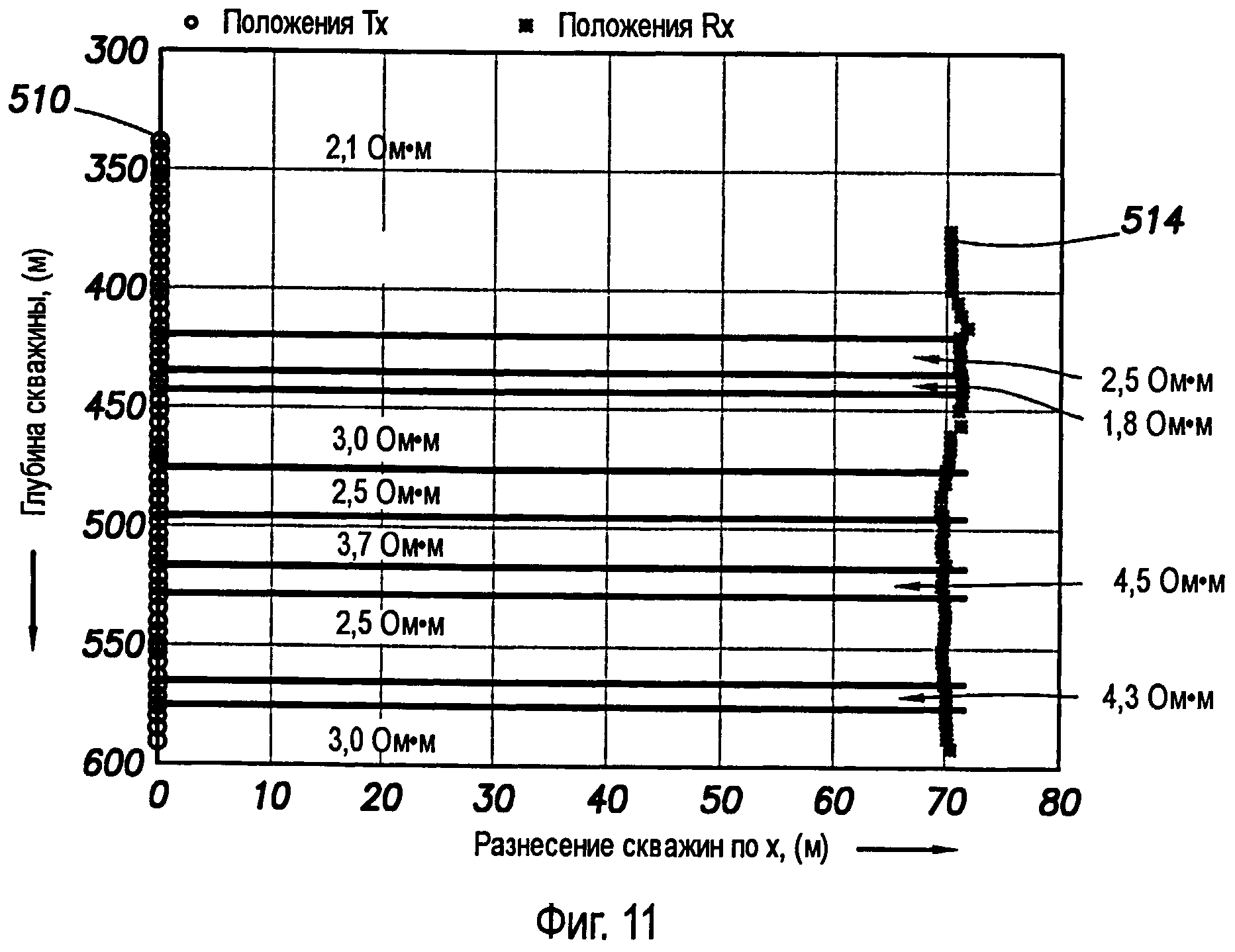
фиг.11 - схематическое представление примера реальных скважин, имеющих необсаженные стволы скважин, с показом фактических геометрий излучателя и приемника в соответствии с осуществлением изобретения;
фиг.12 - схематическое представление скважины из фиг.11 с показом фактического, исходного и вычисленного положений приемника в соответствии с осуществлением изобретения;
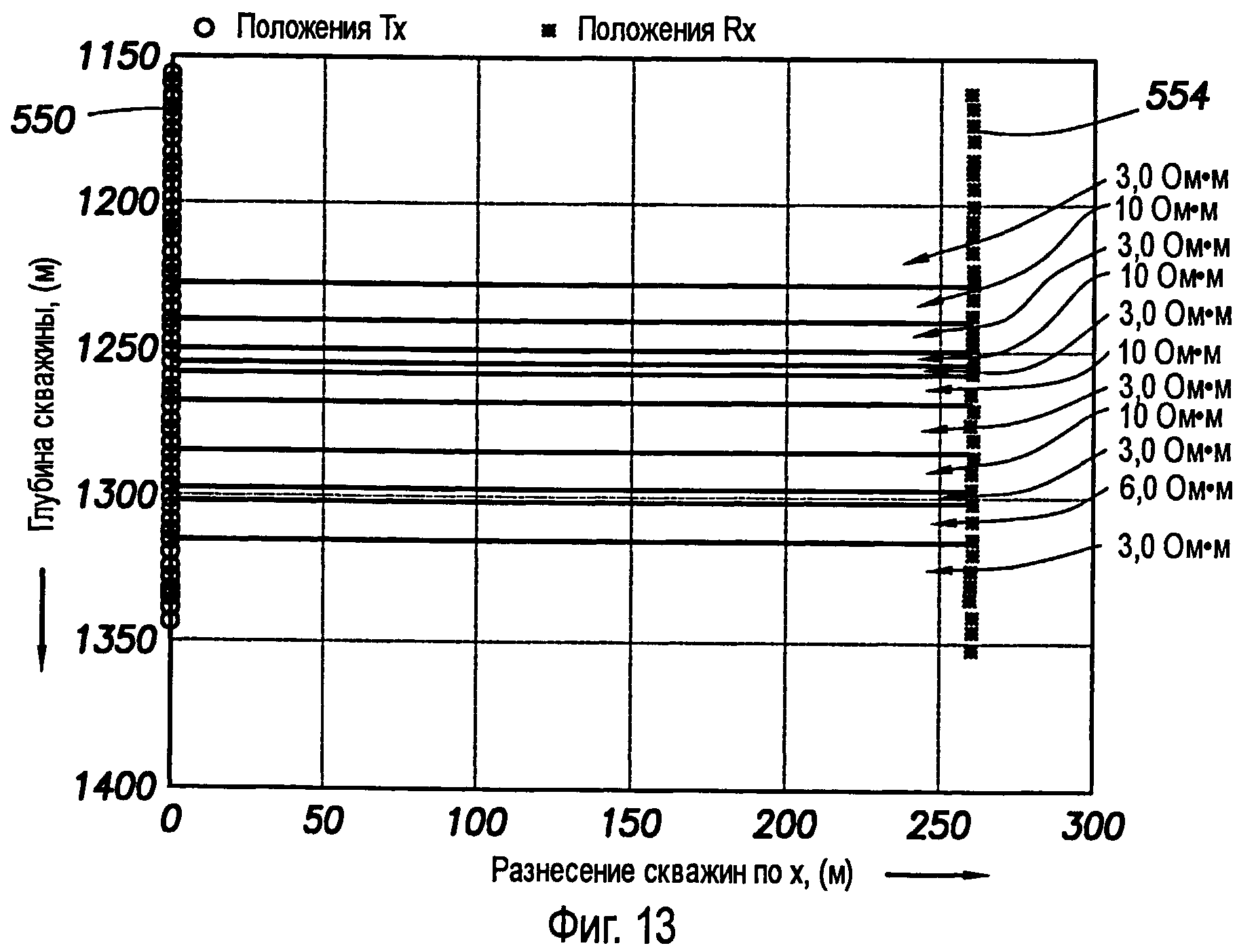
фиг.13 - схематическое представление примера реальных скважин, имеющих необсаженный и обсаженный стволы скважин, с показом фактических геометрий излучателя и приемника в соответствии с осуществлением изобретения;
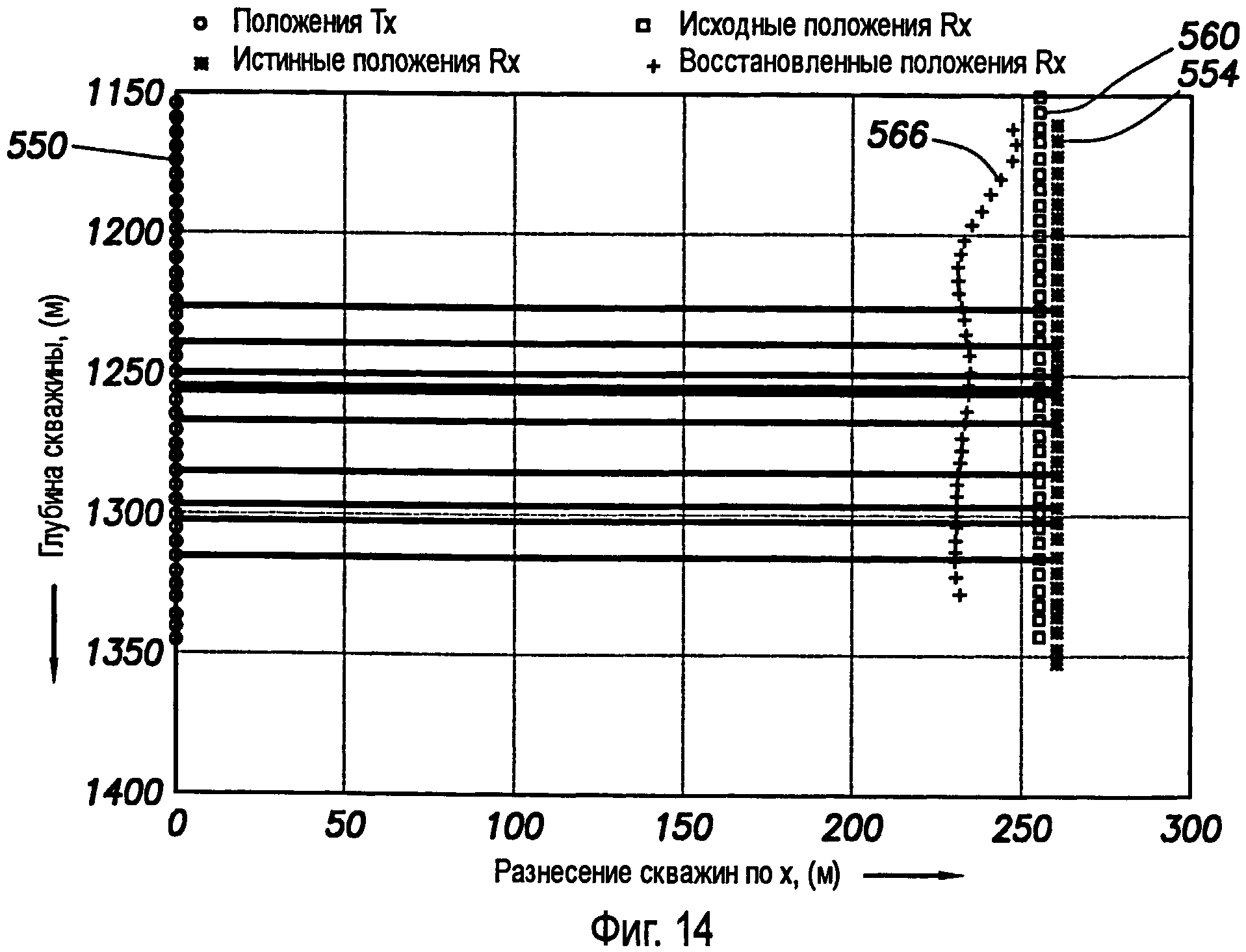
фиг.14 - схематическое представление скважинного поля из фиг.13 с показом фактического, исходного и вычисленного положений приемника в соответствии с осуществлением изобретения; и
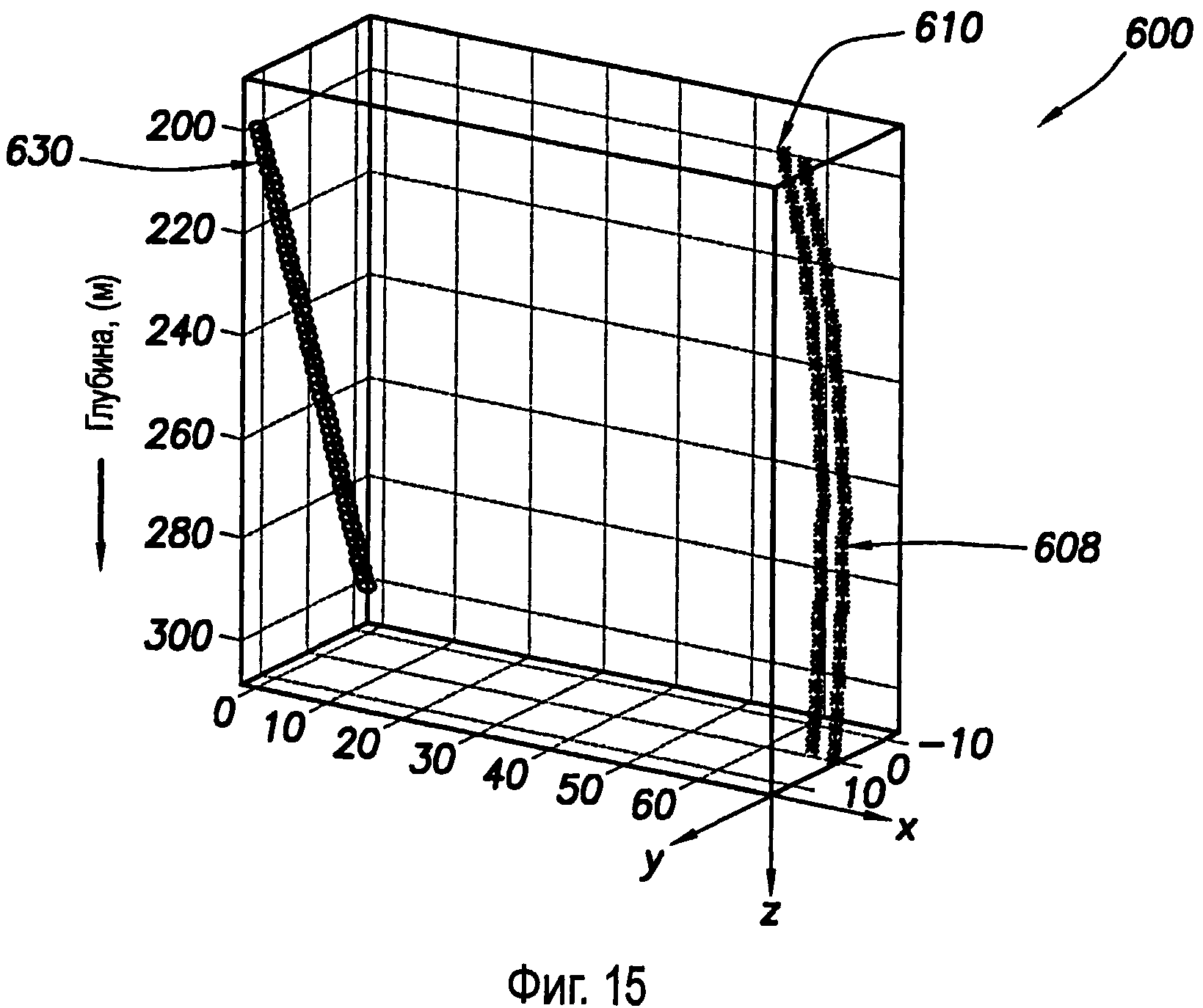
фиг.15 - схематическое представление примера скважинного поля с показом в трех измерениях фактического, исходного и вычисленного положений приемника в соответствии с осуществлением изобретения.
Подробное описание предпочтительных вариантов воплощения изобретения
Что касается фиг.1, то пример осуществления скважинного поля в соответствии с изобретением включает в себя два ствола 10 и 50 скважин. Следует отметить, что в зависимости от конкретного осуществления изобретения скважинное поле может быть подземным или подводным скважинным полем. Для проведения межскважинных электромагнитных исследований спускаемый, например, на кабеле прибор 20 может быть спущен в ствол 10 скважины, например на каротажном кабеле 22. Прибор 20 включает в себя по меньшей мере один излучатель, который способен передавать электрические и магнитные поля через один или несколько пластов между стволами 10 и 50 скважин. Передачами излучающего прибора 20 создаются электрические и магнитные поля, которые измеряются приемным прибором 54, который расположен в другом стволе 50 скважины. В зависимости от конкретного осуществления изобретения приемный прибор 54 измеряет электрические поля, магнитные поля или электрические и магнитные поля, которые создаются передачами излучающего прибора.
В соответствии с некоторыми осуществлениями изобретения контролируемый излучающий прибор 20 пересекает заданную область ствола 10 скважины, и при пересечении заданной области излучающий прибор 20 генерирует несколько электромагнитных передач. В соответствии с некоторыми осуществлениями изобретения каждая из этих передач может происходить при отличающемся положении излучателя. Точно также положение приемного прибора 54 может изменяться, когда излучающий прибор 20 осуществляет передачу, и поэтому приемному прибору 54 аналогичным образом могут быть поставлены в соответствие несколько положений приемника.
В качестве варианта в других осуществлениях изобретения приемный прибор 54 и/или передающий прибор 20 может быть неподвижным, и в этом случае включает в себя многочисленные приемники (в случае приемного прибора 54) или излучатели (в случае излучающего прибора 20). Однако независимо от конкретного перемещения или конструкции излучающего 20 и приемного 54 приборов данные измерений соотносят с многочисленными положениями излучателя и многочисленными положениями приемника, то есть каждое измерение может быть поставлено в соответствие отличающейся паре положений излучателя и приемника.
Чтобы обрабатывать данные измерений для получения изображения межскважинного удельного сопротивления, необходимо получать положения приемника и излучателя. В соответствии с некоторыми осуществлениями изобретения положения излучателя полагают известными, а положения приемника (относительно положений излучателя) получают решением обратной задачи, которую составляют, используя данные низкочастотных межскважинных электромагнитных измерений, полученные при выполнении предшествующей спускоподъемной операции в скважине. Более конкретно, при этой первоначальной спускоподъемной операции излучающий прибор 20 генерирует передачи на низкой частоте (например, передачи в диапазоне приблизительно от 5 до 20 Гц), на которые не влияют существенно электромагнитные свойства пласта (пластов) между стволами 10 и 50 скважин. Результат заключается в сборе данных измерений на приемнике, которые используют (как описано ниже) для определения относительных положений приемника. Затем выполняют следующую спускоподъемную операцию в стволе 10 скважины (используя передачи на более высокой частоте), чтобы получать данные измерений для выполнения межскважинных электромагнитных исследований.
Как описано в настоящей заявке, реализуемый компьютером процесс инверсии используют для получения положений приемника (то есть положений приемника относительно положений излучателя) на основании данных низкочастотных межскважинных электромагнитных измерений. В зависимости от конкретного осуществления изобретения положения могут быть положениями в двух или трех измерениях. В случае осуществлений изобретения, в которых положения представляют собой положения в двух измерениях, каждое положение приемника определяется координатой глубины (координатой z) и координатой разнесения (координатой x).
Как описано ниже, данные низкочастотных межскважинных измерений образуют основу обратной задачи, которая решается автоматически компьютером для положений приемника. Более конкретно, в соответствии с некоторыми осуществлениями изобретения излучающий прибор 20 может рассматриваться как вертикальный магнитный диполь, и каждое местоположение излучателя предполагается известным. Кроме того, компьютером реализуется способ прямого моделирования, который используют для формирования теоретического магнитного и/или электрического поля (в зависимости от полученных измерений); и неизвестными для обратной задачи являются разнесение (координаты x) и сдвиг по глубине (координаты z) между положениями излучателя и приемника (в случае осуществлений изобретения, в которых определяют положения в двух измерениях). Это означает, что имеются две неизвестные для каждого положения приемника, относительно z-оси 12 и x-оси 14, которые показаны на фиг.1.
В обратной задаче целевая функция состоит из двух частей: из несоответствия данных и ограничений модели. Задача заключается в минимизации несоответствия данных с учетом восстановленной геометрии, имеющей гладкую структуру. Определение оптимального соотношения между этими двумя частями заключается в выборе соответствующего параметра регуляризации. Параметр регуляризации и полный процесс инверсии описаны более подробно ниже.
Что касается фиг.2, то в соответствии с некоторыми осуществлениями изобретения обратная задача решается автоматически на компьютере 100. В этой связи компьютер 100 имеет процессор 108 (например, один или несколько микропроцессоров или многоядерный микропроцессор), который выполняет программу 102 инверсии (одну прикладную программу, несколько прикладных программ, в которых используются внешние библиотеки математических функций, и т.д.), которые сохраняются в запоминающем устройстве (ЗУ) 104 компьютера 100. Более конкретно, компьютер 100 получает исходную эталонную модель (называемую m0), которая представляет собой первоначальную оценку относительных положений приемника. Исходную эталонную модель m0 можно получить на основании априорных сведений о геометрии скважины, например сведений, полученных при предшествующем спуске и подъеме каротажного прибора. Компьютер 100 также получает данные (названные d набл на фиг.2), которые представляют собой данные наблюдений или фактические данные, измеряемые приемным прибором 54 благодаря передачам излучателями. В процессе инверсии создается модель (названная m на фиг.2) положений приемника, которая автоматически уточняется с помощью итераций, которые выполняются компьютером 100 до достижения сходимости (описанной дополнительно ниже); и когда сходимость достигается, модель m отображает итоговые вычисленные положения приемника.
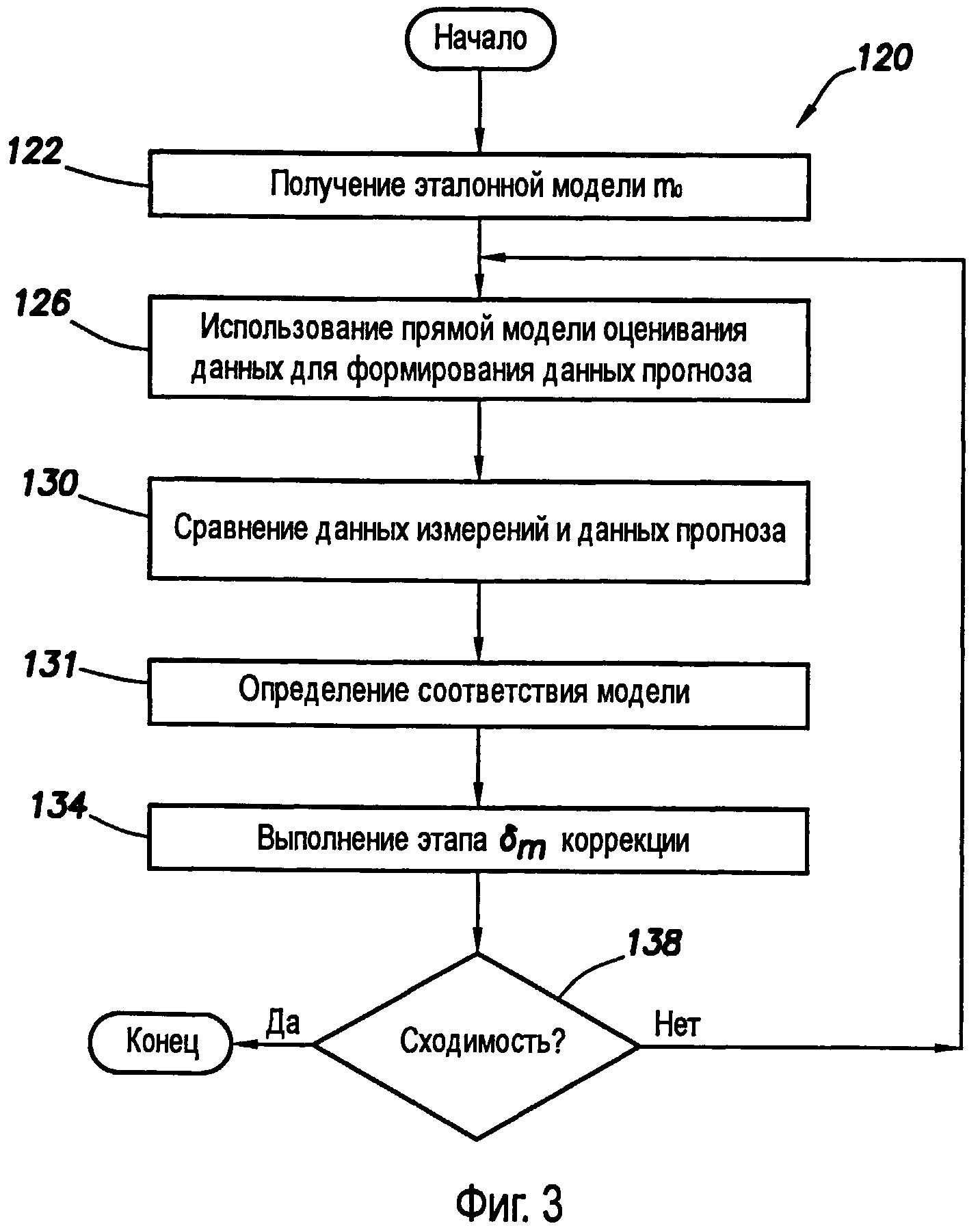
На фиг.3 представлен способ 120, который в общих чертах отражает процесс инверсии, который выполняется компьютером 100 (см. фиг.2) путем выполнения программы 102 инверсии в соответствии с осуществлением изобретения. В соответствии со способом 120 согласно блоку 122 компьютер 100 получает исходную эталонную модель m0. Затем компьютер 100 выполняет итерации для определения положений приемника. Каждая итерация включает в себя использование (блок 126) прямой модели оценивания данных для прогнозирования данных измерений на основании текущей модели m. После этого согласно блоку 130 компьютер 100 сравнивает параметры (описанные ниже) для получения характеристики несоответствия данных (меры, отражающей, насколько близко находятся данные прогноза к данным измерений) и согласно блоку 131 определяет соответствие модели. На основании этих параметров компьютер 100 выполняет этап коррекции (названный δm в блоке 134 из фиг.3). Этап δm коррекции представляет собой коррекцию положений приемника, применяемую к текущей модели m. Если компьютер 100 определяет, что сходимость не наступает (согласно ромбу 138), то компьютер 100 начинает другую итерацию (с обновленной моделью m), начиная с блока 126.
На фиг.4 представлена обобщенная архитектура 150 программного обеспечения, которую можно использовать для вычисления положений приемника (то есть конечной модели m) в соответствии с некоторыми осуществлениями изобретения. Архитектура 150 программного обеспечения включает в себя прямую модель 154 оценивания данных, которая получает текущую модель m. На основании этой модели прямая модель 154 оценивания данных образует данные прогноза. Вычислитель 158 возмущения осуществляет этап (δm) коррекции в ответ на данные прогноза, данные измерений и ограничения гладкости модели. Затем ранее вычисленные положения 170 приемника корректируются с использованием выходного сигнала с вычислителя 158 возмущения (а именно, сумматором 160, который складывает масштабированную версию множителя ∫m с ранее вычисленными положениями 170 приемника для образования новой модели m. Новая модель m используется прямой моделью 154 оценивания данных (в качестве текущей модели m) для выполнения еще одной итерации до наступления схождения.
Ниже приведены математические соотношения после процесса инверсии. Обратную задачу формулируют как задачу оптимизации и образуют скорректированную геометрию приемника, которая минимизирует целевую функцию ϕ(m), показанную ниже:
ϕ(m)=ϕ d(m)+βϕ m(m) (уравнение 1),
где m представляет собой вектор параметра модели (или геометрию приемника) размера М (удвоенного количества положений приемника), который имеет следующий вид:
m=[x
1, x
2,…,x
Nrx, y
1, y
2,…,y
Nrx, z
1, z
2,…,zNrx]T
 (уравнение 2).
(уравнение 2).
Верхний индекс Т означает операцию транспонирования. Первый член ϕ d в правой части уравнения (1) является мерой l 2-нормы несоответствия данных, и он описывается уравнением ниже:
ϕ d=||W d(d-d набл)||2 (уравнение 3),
где d набл представляет собой вектор, содержащий N наблюдений (где N является произведением количества положений излучателя и количества положений приемника) данных измерений, и d представляет собой вектор данных прогноза (названный F[m]). Вектор d описывается уравнением ниже:
 (уравнение 4).
(уравнение 4).
В уравнении (4) каждый элемент Н представляет измерение магнитного и/или электрического поля, которое соотнесено с конкретным местоположением приемника (обозначенным нижним индексом) и конкретным местоположением излучателя (обозначенным верхним индексом). Как дополнительно описано ниже, вектор d данных может представлять чисто магнитные поля (в случае теоретического исследования или имитированного режима инверсии), поля, нормированные на отклик в случае конкретной пары излучатель-приемник (в случае режима инверсии между необсаженными скважинами), или поля, нормированные на отклик каждого приемника на конкретный излучатель (в случае режима инверсии между необсаженной скважиной и обсаженной скважиной), или поля двойного отношения (в случае режима инверсии между обсаженными скважинами). Необсаженная скважина может быть закрепленной стекловолокном скважиной. Обсаженная скважина определенно означает обсаженную сталью скважину.
В уравнении (3) матрица W d представляет собой диагональную матрицу, элементы которой являются обратными величинами оцененных стандартных отклонений шума в наблюдениях.
Второй член в правой части уравнения (1) представляет собой целевую функцию модели (или ограничений гладкости), которая описывается уравнением ниже:
ϕ m=||W m(m-m 0)||2 (уравнение 5),
где W m обозначает конечно-разностную дискретизацию требуемого функционала регуляризации. В соответствии с некоторыми осуществлениями изобретения градиент может быть использован в качестве этого функционала. Выбор эталонной модели m 0 отражает априорные сведения о геометрии приемника и может быть осуществлен на основании результата регистрации фактических данных.
Параметр β в уравнении (1) представляет собой компромиссный параметр множителя Лагранжа, который выбирают так, чтобы данные были адекватно согласованными и в то же время восстановленная геометрия имела минимальную структуру.
Взятие производной ϕ из уравнения (1) по m и придание результату нулевого значения дает необходимое условие минимума:
 (уравнение 6),
(уравнение 6),
где J является матрицей чувствительности (или матрицей Якоби) размера N×M, которая имеет следующие элементы:
 (уравнение 7).
(уравнение 7).
Вычисление J можно осуществить, используя конечно-разностное приближение при последовательном возмущении приемника x, y, z. Более подробно вычисление J описано ниже.
Выполнив разложение Тейлора первого порядка F[m] относительно m (n), модель при n-ой итерации можно описать следующим образом:
F[m]=F[m (n)]+J(m-m (n))=F[m (n)]+Jδm (уравнение 8).
Введение уравнения (8) в уравнение (6) приводит к решению Гаусса-Ньютона для этапа коррекции возмущения δm модели, описываемому уравнением ниже:
 (уравнение 9).
(уравнение 9).
В соответствии с некоторыми осуществлениями изобретения практичный простой процесс охлаждения может быть использован для определения множителя β Лагранжа. Более конкретно, β (0) придают большое значение, которое определяют в соответствии с:
 (уравнение 10),
(уравнение 10),
где  и
и  представляют собой исходное несоответствие данных и нормы модели, соответственно.
представляют собой исходное несоответствие данных и нормы модели, соответственно.
Результирующий большой исходный множитель β Лагранжа делает матрицу коэффициентов в уравнении (9) диагонально преобладающей, и поэтому компьютер 100 (фиг.2) всегда может осуществлять этап δm коррекции. Компьютер 100 выполняет проверку, чтобы определить, уменьшает ли текущая модель несоответствие данных или нет. Если несоответствие снижается по сравнению с тем, что было ранее, компьютер 100 обновляет модель m, уменьшает множитель β Лагранжа на заданный коэффициент (например, такой как 2) и затем начинает следующую итерацию. В противном случае компьютер 100 прекращает выполнение этапа коррекции и еще раз проверяет несоответствие. В соответствии с некоторыми осуществлениями изобретения компьютер 100 повторяет этот процесс до достижения заданного несоответствия.
Поскольку количество неизвестных в уравнении (9) может быть порядка одной сотни (например), использование разложения по особым значениям для решения линейных уравнений является эффективным. После того, как компьютер 100 определяет возмущение δm, компьютер 100 обновляет геометрию приемника следующим образом:
m k+1=m k+αδm (уравнение 11),
где α является постоянной продолжительностью этапа. Например, в соответствии с некоторыми осуществлениями изобретения можно использовать α=0,6. В идеальном случае для этого следует использовать поиск слабой линии.
Когда имеют дело с данными измерений при межскважинных электромагнитных методах разведки, могут встречаться сложности, например, калибровочный коэффициент датчика приемника (который может не быть известным) и влияние обсадной колонны. Поэтому в соответствии с некоторыми осуществлениями изобретения компьютер 100 (путем выполнения программы 102 инверсии) может быть переведен в один из различных режимов инверсии данных: имитационный режим инверсии данных, режим инверсии данных измерений между необсаженными скважинами, режим инверсии данных измерений между необсаженной и обсаженной скважинами и режим инверсии данных измерений между обсаженными скважинами.
Имитационный режим инверсии данных предназначен для комплексного изучения способа инверсии. Данные представляют составляющую чисто магнитного поля, выраженную в амперах на метр (А/м). Это означает, что данные, используемые при инверсии, можно выразить следующим образом:
d=F[m] (уравнение 12),
где F[m] обозначает оператор прямого моделирования. Элементы матрицы J чувствительности, например, производную по расстоянию х приемника от излучателя, можно аппроксимировать, используя формулу центроконечной разности (второго порядка точности) в следующем виде:
 (уравнение 13).
(уравнение 13).
Затем, как описано выше, компьютер 100 может использовать матрицу J чувствительности из уравнения (13) для восстановления геометрии приемника.
Компьютер 100 использует режим инверсии данных между необсаженными скважинами, когда излучающий и приемный приборы находятся в необсаженных скважинах или закрепленных стекловолокном скважинах. Данные представляют измеренное магнитное поле в вольтах или милливольтах (мВ). В этом случае предполагается, что датчики приемника имеют одинаковый калибровочный коэффициент или различие калибровочных коэффициентов может быть исключено сглаживанием при предварительной обработке. Это означает, что, как описывается уравнением ниже, различие между данными  измерений в вольтах и соответствующим магнитным полем в А/м заключено в постоянной (калибровочном коэффициенте) для всех местоположений пары излучатель-приемник:
измерений в вольтах и соответствующим магнитным полем в А/м заключено в постоянной (калибровочном коэффициенте) для всех местоположений пары излучатель-приемник:
 (уравнение 14).
(уравнение 14).
Прямой путь избавления от постоянной С в уравнении (14) заключается в задании начала отсчета при инверсии в следующем виде:
 (уравнение 15),
(уравнение 15),
где m оп означает опорную точку пары излучатель-приемник, относительно которой все данные нормируют на отклик в этой точке.
Соответственно осуществляют изменение элемента чувствительности (относительно x) следующим образом:
 (уравнение 16).
(уравнение 16).
При выполнении указанного компьютер 100 может определить геометрию приемника без знания калибровочного коэффициента для датчика приемника.
Компьютер 100 использует режим инверсии данных измерений между необсаженной и обсаженной скважинами, когда излучающий прибор 20 находится в необсаженной скважине, а приемный прибор 54 находится в обсаженной сталью скважине (или другим проводником, или материалом с высокой магнитной проницаемостью). Данные магнитных измерений представляются в вольтах или милливольтах. В этом конкретном случае помимо калибровочного коэффициента на измерения влияет обсадная колонна. Отсюда вытекает, что данные измерений для одного местоположения приемника можно выразить в следующем виде:
 (уравнение 17),
(уравнение 17),
где Tx обозначает местоположение излучателя, С обозначает постоянный калибровочный коэффициент и K(x,y,z) обозначает влияние обсадной колонны, которое также является постоянным для данного приемника и различных излучателей, но изменяется при изменении местоположений приемника. Для исключения С и K начало отсчета при инверсии можно представить в следующем виде:
 (уравнение 18),
(уравнение 18),
где Tx оп обозначает опорное местоположение пары излучатель-приемник для нормирования, но является разным для различных местоположений приемника вследствие наличия обсадной колонны.
Аналогичным образом элемент чувствительности необходимо изменить соответственно следующему:
 (уравнение 19).
(уравнение 19).
В случае режима измерений между обсаженными скважинами данные магнитных измерений также регистрируются в вольтах или милливольтах. В этом конкретном случае помимо калибровочного коэффициента на измерения влияют обсадная колонна излучателя и обсадная колонна приемника. В данном случае данные измерений для одного местоположения приемника можно выразить в следующем виде:
 (уравнение 20),
(уравнение 20),
где Тх обозначает местоположение излучателя, С обозначает постоянный калибровочный коэффициент, K tx(Tx) обозначает влияние обсадной колонны на излучатель Тх, которое является постоянным для различных приемников, но изменяется при изменении местоположения излучателя, и K rx(x,y,z) обозначает влияние обсадной колонны на приемник (x,y,z), которое является постоянным для различных излучателей, но изменяется при изменении местоположения приемника. Для исключения C, K tx(Tx) и K tx(x,y,z) начало отсчета при инверсии может быть представлено следующим образом:
 (уравнение 21),
(уравнение 21),
где Тх оп обозначает опорное местоположение излучателя для нормирования и Тх оп является фиксированным при различных местоположениях приемника. Rx оп обозначает опорное местоположение приемника для нормирования и Rx оп является фиксированным при различных местоположениях излучателя.
Аналогично этому необходимо, чтобы элемент чувствительности изменялся соответствующим образом:
 (уравнение 22).
(уравнение 22).
В случае такой реализации компьютер 100 может определять геометрию приемника без знания калибровочного коэффициента и влияния обсадной колонны, обусловленного нахождением приемника и излучателя в обсаженных скважинах.
Ниже описаны три набора данных, соответствующие трем описанным выше режимам инверсии данных, для демонстрации выполнения разработанного кода инверсии.
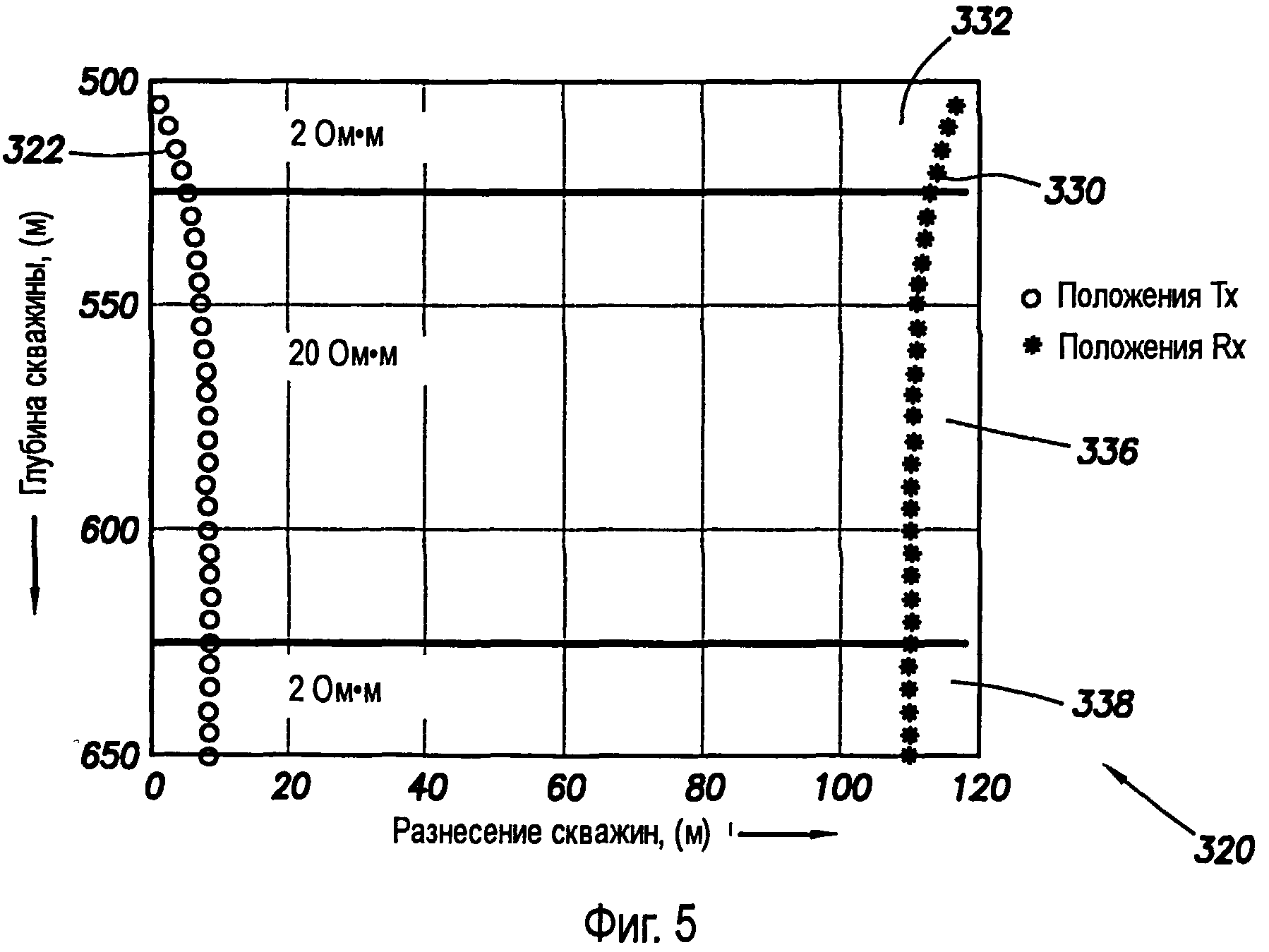
На фиг.5, 6, 7, 8 и 9 показаны результаты вычисления геометрии приемника компьютером 100 в случае синтетического или имитированного набора данных (то есть для компьютера 100 это был имитированный режим инверсии данных). Более конкретно, на фиг.5 показана фактическая геометрия приемников и излучателей, которые были развернуты в двух стволах скважин. В этой связи при имитации 30 местоположений 322 излучателя были в первом стволе скважины и 30 местоположений 330 приемника были во втором стволе скважины. Пласт имел три слоя 332, 336 и 338 с удельными сопротивлениями 2, 20 и 2 Ом·м, соответственно. Для измерения была выбрана частота 50 Гц. При имитации использовали вертикальное чисто магнитное поле (действительную и мнимую части) в дополнение к 0,5% случайного шума в качестве данных.
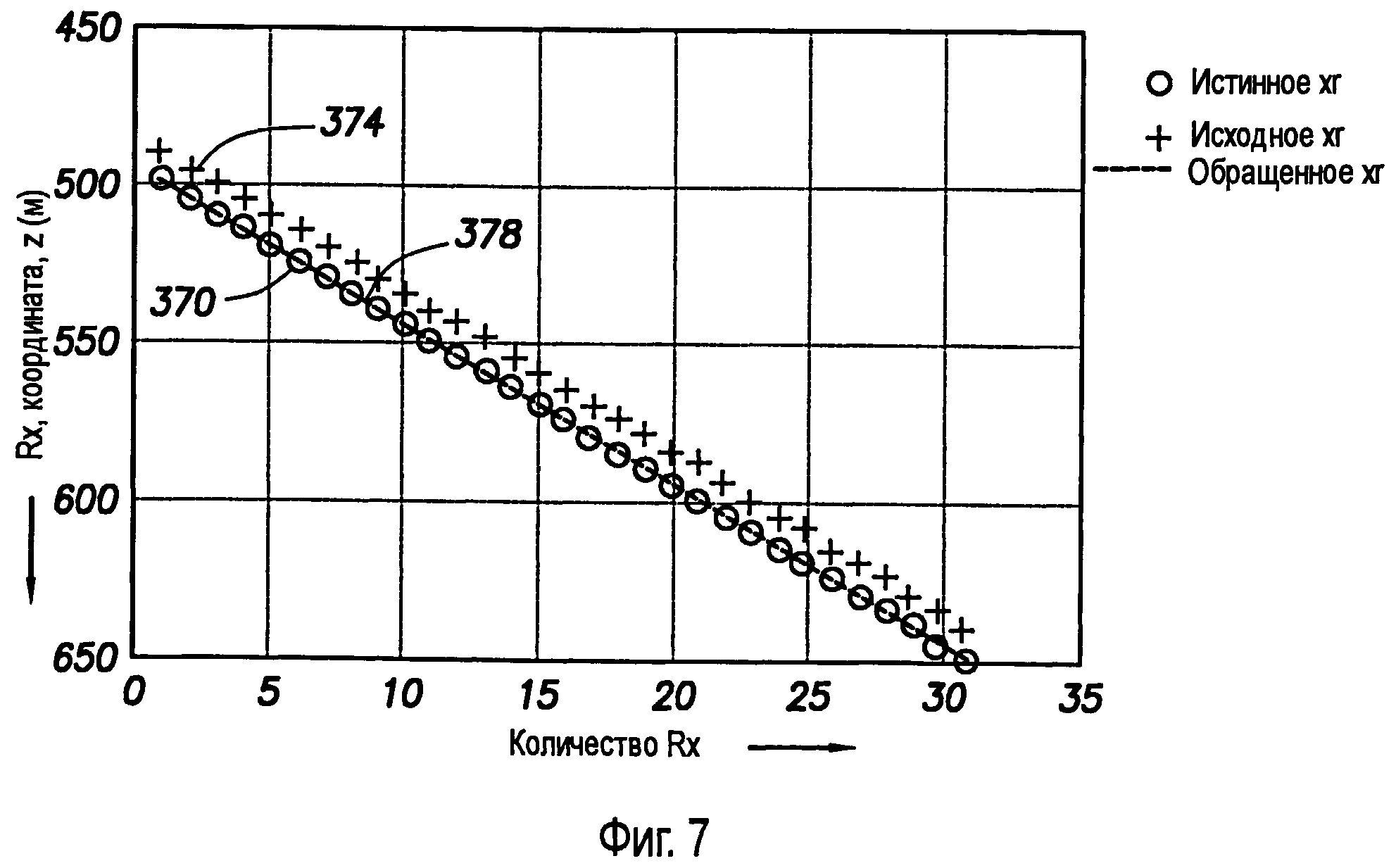
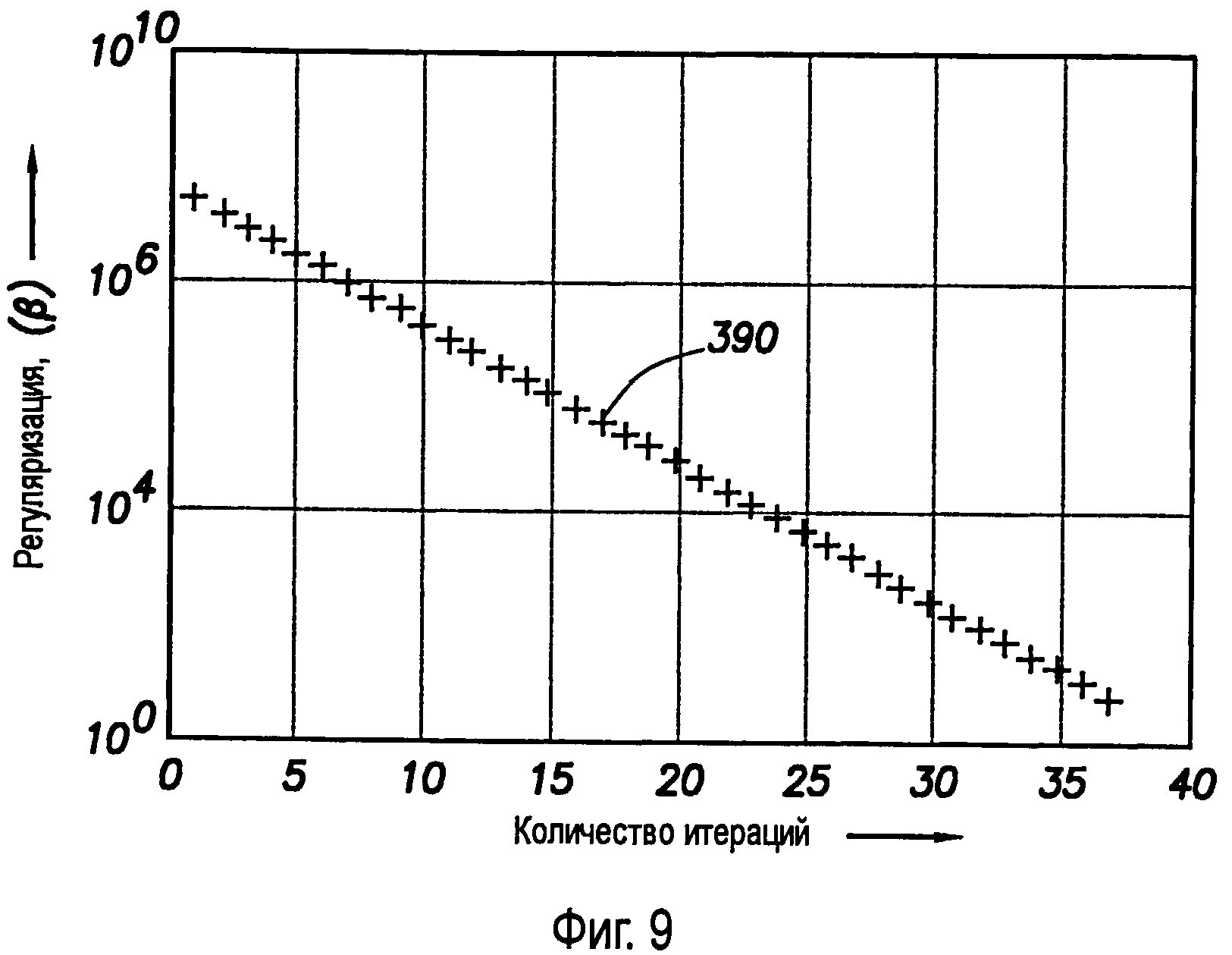
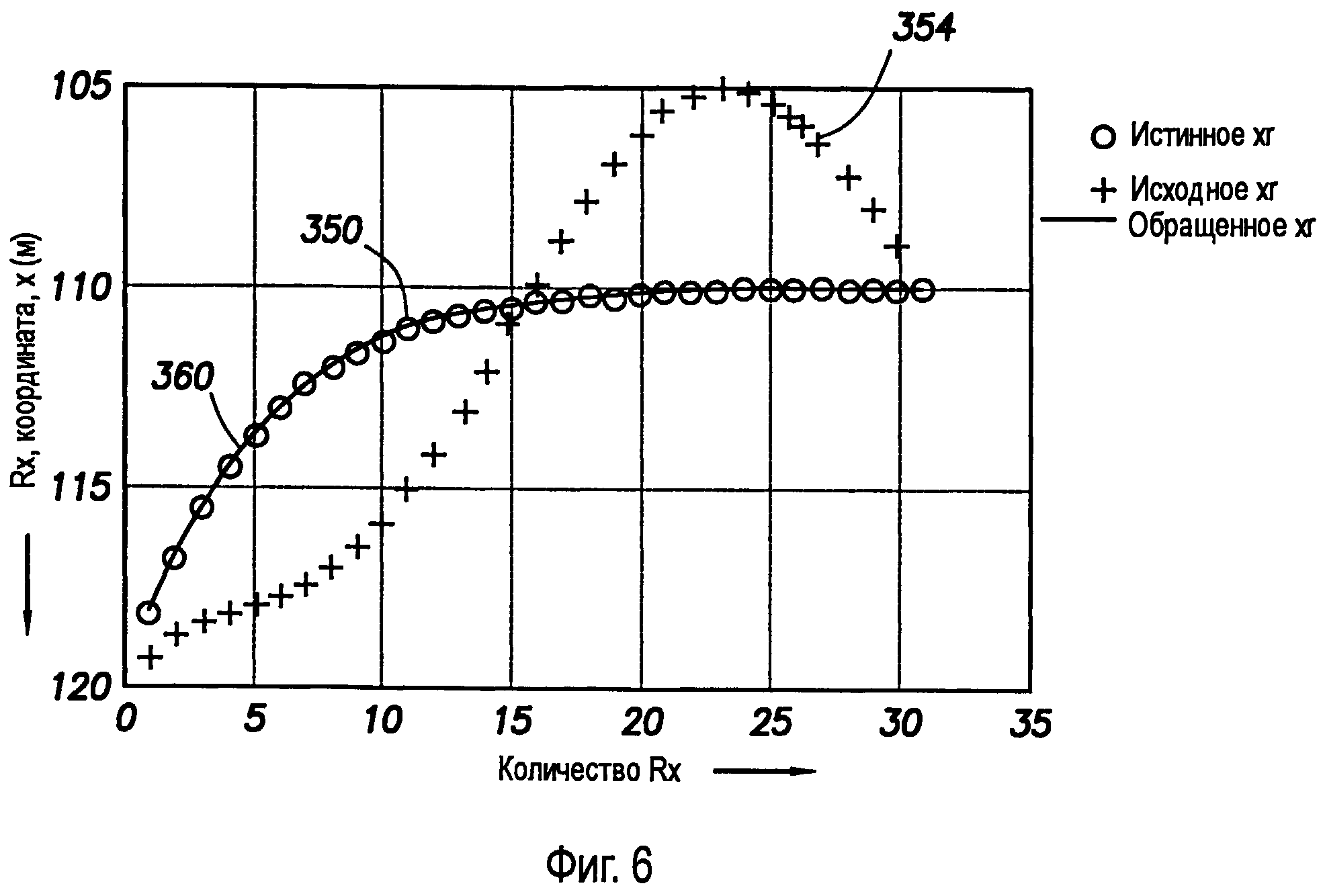
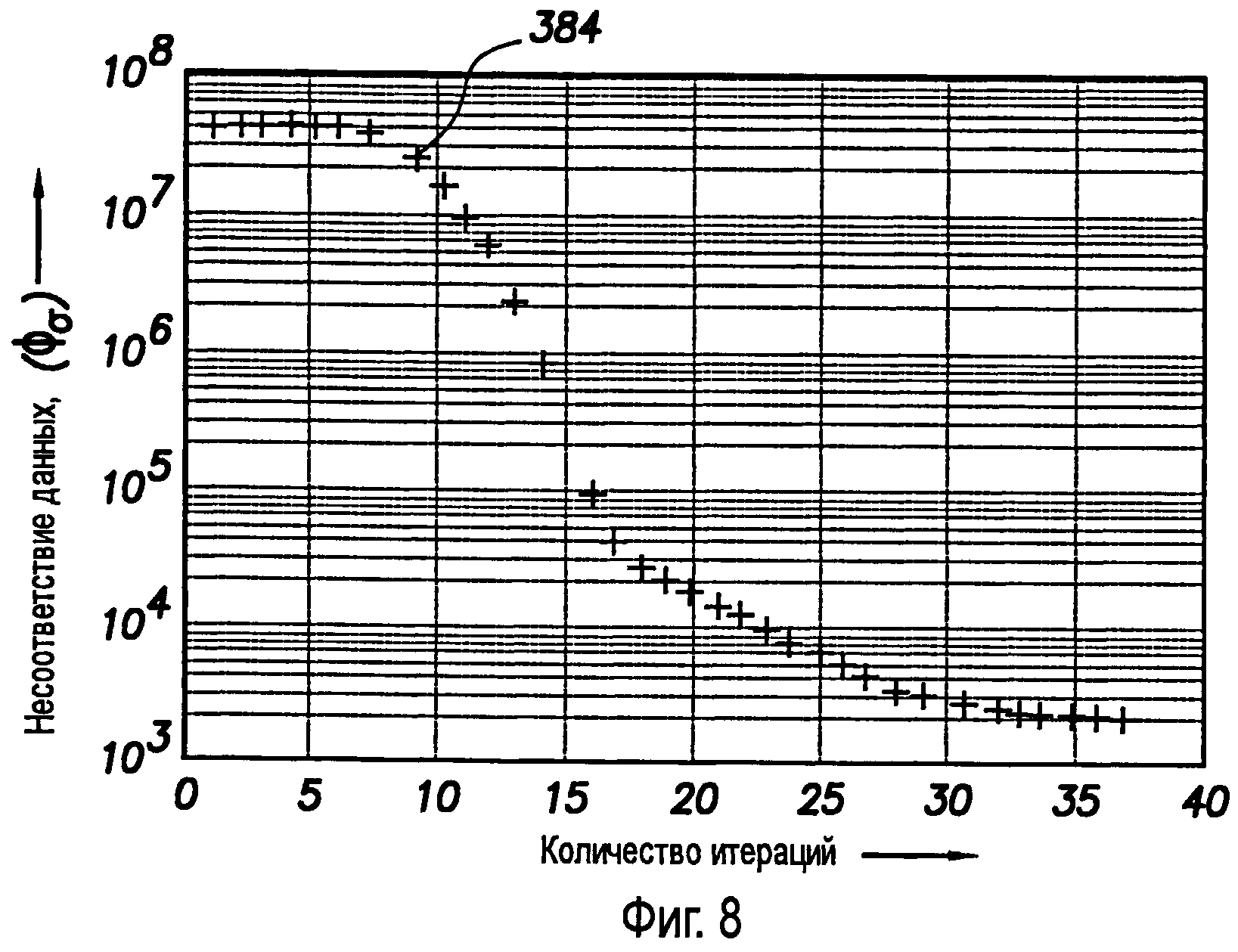
При имитации исходные положения m0 приемника намеренно сдвигали по дистанции и глубине. Более конкретно, на фиг.6 показаны исходные 354 и истинные или фактические 360 координаты x положений приемника и на фиг.7 показаны исходные 374 и истинные 370 координаты z положений приемника. На фиг.8 показана кривая 384 несоответствия данных в зависимости от количества итераций и на фиг.9 показана кривая 390 множителя β Лагранжа в зависимости от количества итераций. На фиг.6 и 7 также показаны координаты х (350 на фиг.6) и z (378) приемника, полученные с помощью процесса инверсии, который выполнялся компьютером 100. Как показано на фиг.6 и 7, координаты х (350) и z (378), полученные с помощью процесса инверсии, следуют точно по траектории истинных координат х (360) и z (370) соответственно. На фиг.10 представлено двумерное изображение геометрии скважины с показом положений 400 излучателя (известных) в двух измерениях, исходных положений Мо 408 приемника в двух измерениях, положений 412 приемника в двух измерениях, полученных с использованием автоматического процесса инверсии, и истинных положений 404 приемника в двух измерениях. После 37 итераций было достигнуто заданное несоответствие данных. Как показано на фиг.10, восстановленные положения 412 приемника, полученные с помощью описанного выше процесса инверсии, следуют вблизи траектории истинных положений 404 приемника.
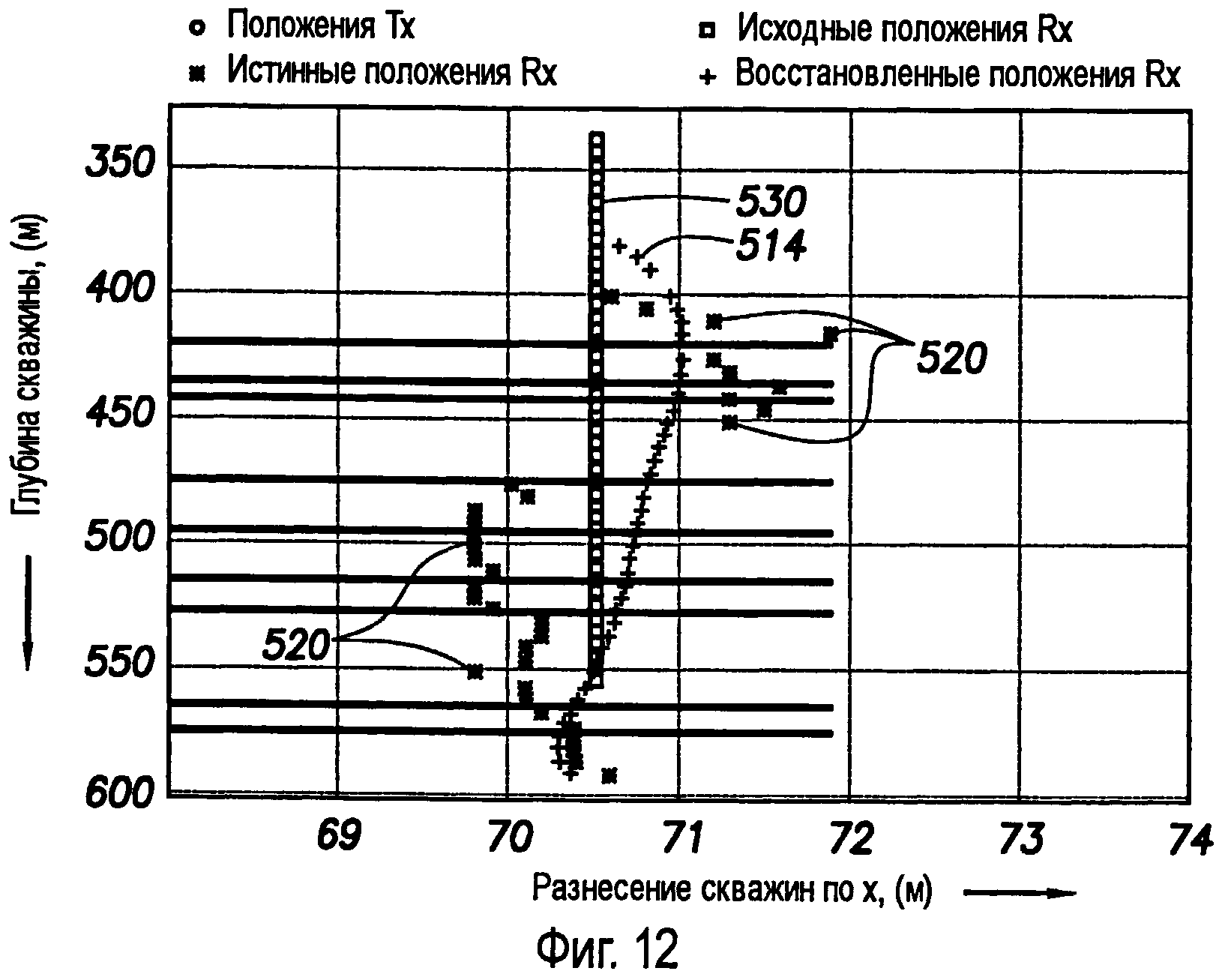
На фиг.11 и 12 представлены наборы данных, полученные на реальном скважинном поле, для которых использовали режим инверсии данных между необсаженными скважинами. Частота передачи электромагнитных сигналов была 23 Гц.
На фиг.11 показаны истинные или фактические положения 510 излучателя и истинные или фактические положения 514 приемника. Как показано на фиг.11, положения излучателя и приемника 510 и 514 пересекают слои с различным удельным сопротивлением.
На фиг.12 показаны исходные положения 530 приемника и истинные или фактические положения 514 приемника, которые были получены с помощью ручной аппроксимации. На фиг.12 также показаны восстановленные положения 520 приемника, которые были получены с помощью описанного выше процесса инверсии.
На фиг.13 и 14 показан набор фактических данных, полученный в режиме инверсии данных между необсаженной и обсаженной скважинами. Для этого примера использовали 39 положений 550 излучателя (см. фиг.13) и 36 положений 554 приемника. К тому же набор данных был получен в 11-слойном пласте на частоте 104 Гц. На фиг.13 и 14 показаны фактические положения 554 приемника, полученные при ручной аппроксимации данных, и положения 550 излучателя. На фиг.14 также показаны исходные положения 560 приемника и восстановленные положения 566 приемника, полученные с помощью инверсии.
Многие другие осуществления являются возможными и находятся в объеме прилагаемой формулы изобретения. Например, описанный выше автоматический способ инверсии может быть применен для вычисления конкретной геометрии скважины в трех измерениях и может быть применен к всего лишь единственному стволу скважины. Более конкретно, хотя в настоящей заявке для упрощения рассмотрения были раскрыты положения в двух измерениях, понятно, что уравнения инверсии могут быть модифицированы, чтобы они отражали положения приемников в трехмерной геометрии. Поэтому что касается фиг.15, то в соответствии с некоторыми осуществлениями изобретения трехмерная кривая 600 может отражать исходные положения 608 приемника в трех измерениях, истинные или восстановленные положения 610 приемника в трех измерениях и положения 630 излучателя в трех измерениях.
В соответствии с некоторыми осуществлениями изобретения приемники могут быть расположены на морском дне, а излучатели могут находиться в стволе скважины, который продолжается ниже морского дна. В другом осуществлении изобретения приемники можно разместить в стволе скважины, а излучатели можно перемещать, используя буксируемую на поверхности группу излучателей, или в зависимости от конкретного осуществления изобретения, используя буксируемую воздушным судном группу излучателей. Кроме того, положения приемников можно полагать известными, а положения излучателей могут быть определены компьютером в процессе инверсии. Поэтому возможны многие варианты и они находятся в объеме прилагаемой формулы изобретения.
Хотя настоящее изобретение было описано с обращением к ограниченному количеству осуществлений, для специалистов в данной области техники, имеющих выгоду от этого раскрытия, должны быть очевидны его многочисленные модификации и варианты. Предполагается, что прилагаемая формула охватывает все такие модификации и варианты, и они находятся в объеме настоящего изобретения.
Вязкоупругие поверхностно-активные буферные жидкости
Способ и устройство для регулирования набухания эластомера для применения на забое скважины
Устройство электромагнитного каротажа
Способ оптимизации добычи в скважине с искусственным подъемом
Применение разлагаемых волокон в растворах обращенных эмульсий для глушения скважины
Подводная насосная система
Способы производства нефтепромысловых разлагаемых сплавов и соответствующих продуктов
Буровая труба, система покрытия и способ нефтепромысловых применений
Скважинный перфоратор (варианты) и способ перфорации
Установка и система для геологического сопровождения бурения скважины и определения характеристик коллектора
Инструмент нейтронного каротажа, имеющий источник и мишень, с добавкой дейтериево-тритиевого газа
Центробежный насос для откачивания текучих сред (варианты) и способ его изготовления (варианты)
Предварительный анализ буровой площадки для планирования разработки месторождения
Описание подземной структуры с помощью итеративного выполнения инверсии на основе функции
Жидкость для обработки приствольной зоны с применением системы и способа разжижения на основе окислителя
Накладной ультразвуковой многофазный расходомер
Компоновка со сбросом шара и способ ее использования в скважине
Генератор нейтронов
Вязкоупругие поверхностно-активные буферные жидкости
Способ и устройство для регулирования набухания эластомера для применения на забое скважины

