Результат интеллектуальной деятельности: СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области радиолокации, а именно к радиолокационным системам на базе радиолокационных станций с управляемыми параметрами излучения, предназначенным для обнаружения и сопровождения воздушных объектов, прикрываемых бортовыми средствами помех.
Известен способ функционирования независимой радиолокационной системы [Конторов Д.С., Голубев-Новожилов Ю.С. Введение в радиолокационную системотехнику. М.: Советское радио. 1971. стр.167-184], заключающийся в независимом излучении зондирующих сигналов каждой РЛС системы в пределах заданных зон обзора в соответствии с индивидуальным расписанием, приеме сигналов, обнаружении, измерении координат и фильтрации параметров траекторий объектов по отраженным сигналам, передаче координат и параметров движения обнаруженных по отраженному сигналу объектов вместе с корреляционными матрицами ошибок их определения на центральный пункт обработки информации, отождествлении параметров и объединении данных, принадлежащих каждому воздушному объекту, на центральном пункте обработки информации. Радиолокационные станции в составе системы могут быть как разно-, так и однотипными. Зоны наблюдения радиолокационных станций полностью или частично перекрываются. Недостатком данного способа является то, что в условиях наличия источников помех достаточной мощности обнаружение объектов в значительной части зоны обзора оказывается невозможным.
Известен способ функционирования пассивной радиолокационной системы [Черняк B.C. Многопозиционная радиолокация. М.: Радио и связь. 1993, стр.74-76, 320, 362, 381-390], заключающийся в приеме сигналов, обнаружении, измерении и фильтрации угловых координат объектов по излучаемым с них помехам, передаче угловых координат и их первых производных, обнаруженных по излучаемым помехам объектов вместе с корреляционными матрицами ошибок их определения на центральный пункт обработки информации, отождествлении пеленгов на источники помех, сопровождаемых различными РЛС, вычислении пространственных координат источников помех с последующей их фильтрацией и определением параметров движения. Для систем гражданского и оборонного назначения пассивный режим радиолокационной системы реализуется, как привило, параллельно (одновременно) с активным.
Известны способы функционирования независимой радиолокационной системы (радиолокационной станции), направленные на грубое определение областей пространства, в которых факты отсутствия или наличия объектов определены с заданной вероятностью, и областей пространства, где могут находиться необнаруженные ввиду недостаточного отношения сигнал/(помеха + шум) объекты, с последующей оптимизацией обзора пространства в рамках радиолокационной системы (радиолокационной станции) [Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. М.: Советское радио. 1968, стр.79-90; Геращенко СВ., Прядко А.Н., Шевчук В.И. Метод оптимизации распределения энергетического ресурса РЛС с ФАР при поиске и обнаружении целей в условиях нестационарной помеховой обстановки. Радиотехника, 2008, №7, стр.81-84; Гузь В.И., Бутырин А., Липатов В.П., Барингольц Т.В. Адаптивное управление распределением энергетического и временного ресурса РЛС с фазированной антенной решеткой. Известия Вузов. Радиоэлектроника. 2007, т.50. №2, стр.3-14; Пешко А.С., Мажура Н.Н., Юрчик И.А. Организация обзора пространства РЛС на основе ФАР, с электронно-механическим сканированием. Радиотехника, №8, 2009, стр.84; Васильев О.В., Кареев В.В. Управляемый радиолокационный поиск воздушных целей, оптимизированный по информационному критерию.// Радиотехника. 2003, стр.84-88 и др.].
На основании полученной информации решаются задачи установления приоритета просмотра различных областей пространства радиолокационными станциями системы и грубого определения области возможного нахождения и параметров движения воздушных объектов, прикрываемых бортовыми средствами помех. Физической основой указанных способов является оценка суммарной мощности помех и внутренних шумов и определении по этим данным конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, с последующей передачей параметров зон подавления на пункт обработки, построении области неопределенности положения объектов на пункте управления системы как пересечения зон подавления РЛС системы и грубом определении параметров движения объектов по изменению положения центра области неопределенности во времени.
Например, согласно способа радиолокационного обзора пространства (варианты) [пат. РФ 2008144719, МПК 7 G01S 13/00 (2006.01), 2008 г.] РЛС, взаимодействующие в контролируемом пространстве, могут функционировать в следующих вариантах:
1) РЛС обмениваются информацией о результатах обзора пространства и с учетом полученной информации путем установки различных приоритетов просмотра участков пространства, входящих в зону ответственности РЛС, увеличивают затраты энергии на просмотр угловых направлений, в которых может находиться цель, за счет ее сокращения на просмотр угловых направлений, в которых цель отсутствует; при этом в информации содержатся координаты просмотренных участков с указанием о наличии или отсутствии в нем цели, координаты обнаруженной в нем цели или еще и данные об ее распознавании; при необходимости осматривают i-е угловое направление с пропусками, если по информации, в том числе других РЛС, это направление не содержит цели или затрачивают энергию на просмотр i-го углового направления в пределах установленного баланса до обнаружения цели, координаты которой получены от других РЛС;
2) передают в банк данных, доступный для ряда других РЛС, и получают из него информацию о просмотренных участках пространства и с учетом полученной информации путем установки различных приоритетов просмотра участков пространства, входящих в зону ответственности РЛС, увеличивают затраты энергии на просмотр угловых направлений, в которых может находиться цель, за счет ее сокращения на просмотр угловых направлений, в которых цель отсутствует; при этом в банк данных передают и получают из него информацию о координатах просмотренных участков с указанием о наличии или отсутствии в нем цели, координаты обнаруженной в нем цели или еще и данные о распознавании цели; при необходимости пропускают (не осматривают) i-е угловое направление, если по информации банка данных это направление не содержит цели, и переходят к анализу j-го углового направления и т.д. или затрачивают энергию на просмотр i-го углового направления в пределах установленного баланса до обнаружения цели, координаты которой получены из банка данных.
В практике создания радиолокационных систем вышеуказанные способы реализуются параллельно (одновременно), образуя способ функционирования радиолокационной системы, заключающийся в определении приоритетов просмотра различных областей пространства каждой РЛС системы в соответствии с априорной и текущей информацией, независимом для каждой РЛС составлении расписания ее функционирования, излучении зондирующих сигналов каждой РЛС системы в пределах заданных зон обзора в соответствии с расписанием, приеме сигналов, оценке суммарной мощности помех и внутренних шумов и определении на этой основе конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, обнаружении, измерении координат и фильтрации параметров траекторий объектов по отраженным сигналам и излучаемым помехам, построения области неопределенности положения объектов на пункте управления системы как пересечения зон подавления РЛС системы, вычислении координат и фильтрации параметров траекторий объектов-носителей источников помех, объединении траекторий объектов, сопровождаемых по отраженному сигналу и по излучаемой помехе, и грубом определении параметров движения объектов по изменению центра области неопределенности во времени и (или) по траекторным параметрам объектов, сопровождаемых по излучаемой помехе.
Указанный способ наиболее близок по своей технической сущности к предлагаемому (прототип).
Недостатком прототипа является низкое качество функционирования радиолокационной системы в условиях организованных помех: небольшие дальности обнаружения воздушных объектов и низкая точность их сопровождения, обусловленные сохранением возможности последовательного во времени радиоподавления отдельных радиолокационных станций из состава системы с полным использованием энергетических возможностей бортовых средств помех, размещаемых на воздушных объектах.
Действительно, пусть радиолокационная система включает  однотипных радиолокационных станций, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования ау- которых относительно линии курса достаточно компактной (с расстояниями между объектами, много меньше дальности до РЛС) группы объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов Δαnn бортовых средств помех |αk-αon|≤Δαnn/2. Число угловых элементов в зоне ответственности в азимутальной и угломестной плоскостях для k-й РЛС составляет N1k и N2k соответственно, а число угловых элементов в зоне приоритетного просмотра по азимуту и углу места составляет n1k и n2k, доля времени в общем временном балансе РЛС, выделяемого на просмотр приоритетных секторов, составляет γk, на просмотр неприоритетных секторов доля времени составит 1-γk.
однотипных радиолокационных станций, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования ау- которых относительно линии курса достаточно компактной (с расстояниями между объектами, много меньше дальности до РЛС) группы объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов Δαnn бортовых средств помех |αk-αon|≤Δαnn/2. Число угловых элементов в зоне ответственности в азимутальной и угломестной плоскостях для k-й РЛС составляет N1k и N2k соответственно, а число угловых элементов в зоне приоритетного просмотра по азимуту и углу места составляет n1k и n2k, доля времени в общем временном балансе РЛС, выделяемого на просмотр приоритетных секторов, составляет γk, на просмотр неприоритетных секторов доля времени составит 1-γk.
Полагаем, что в бортовых средствах помех реализуется адаптивный режим создания помех, направленный на минимизацию общего времени их излучения, то есть помеха создается в ответном режиме только в случае излучения k-й РЛС зондирующего сигнала в направлении области неопределенности, где находятся защищаемые средствами помех воздушные объекты [Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. - М.: Радиотехника, 2003, стр.386-387]. Тогда интенсивность потока заявок на создание помех составит

где Fk - частота повторений зондирующих сигналов K-й РЛС.
Рассматривая средство помех как многоканальную систему массового обслуживания и учитывая, что пропускная способность системы массового обслуживания зависит главным образом от среднего времени обслуживания и слабо зависит от закона распределения времени обслуживания [Вентцель Е.С. Введение в исследование операций. М.: Советское радио. 1967, стр.301], запишем вероятности того, что помеха в настоящий момент не создается (p0), создается одной РЛС (p1), двум РЛС (p2) и n>2 РЛС (pn) для распределения времени обслуживания по показательному закону [Вентцель Е.С. Введение в исследование операций. М.: Советское радио. 1967, стр.306, 307]
где  ;
; - средняя длительность создания помех; M - максимальное число каналов создания помех в бортовых средствах помех.
- средняя длительность создания помех; M - максимальное число каналов создания помех в бортовых средствах помех.
Средний период обзора приоритетных и неприоритетных секторов пространства составит


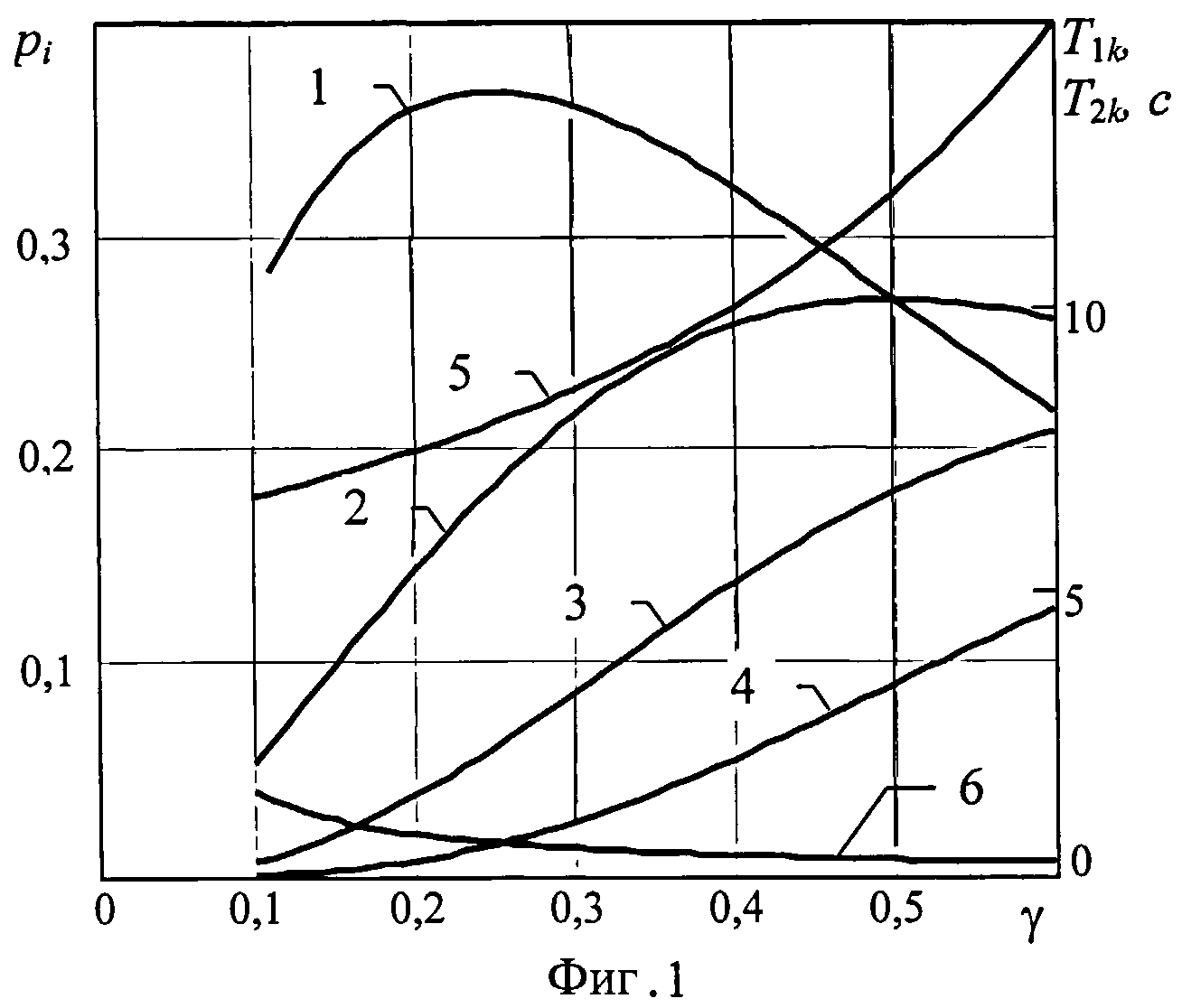
На фиг.1 приведены результаты расчетов вероятности создания помех одной, двум, трем, четырем РЛС (кривые 1-4 соответственно) и средние периоды обзора приоритетных (кривая 5) и неприоритетных (выноска 6) секторов пространства при типовых для РЛС с игольчатым лучом значениях N1k=60; N2k=10; n1k=5; n2k=3; Fk=100 Гц;  мс при наличии в средстве помех M=10 каналов формирования помех и K=4 РЛС в составе радиолокационной системы.
мс при наличии в средстве помех M=10 каналов формирования помех и K=4 РЛС в составе радиолокационной системы.
Как видно из изображенных на фиг.1 графических зависимостей, при допустимых значениях γk<0,4, при которых период обзора неприоритетных секторов пространства не превышает 10 секунд, вероятность одновременного создания помех одной, двум, трем и четырем РЛС составляет 0,32; 0,25; 0,14 и 0,05 соответственно, то есть средство помех функционирует преимущественно в одно- и двухсигнальном режиме.
Техническим результатом изобретения является повышение качества обнаружения и сопровождения воздушных объектов, прикрываемых бортовыми средствами помех, радиолокационной системой на базе радиолокационных станций с управляемыми параметрами излучения за счет специального управления параметрами излучения радиолокационных станций, исключающем возможность последовательного по времени подавления бортовыми средствами помех каждой из них.
Указанный результат достигается тем, что в способе функционирования радиолокационной системы на базе радиолокационных станций (РЛС) с управляемыми параметрами излучения при обнаружении группы воздушных объектов, прикрываемых бортовыми средствами помех, заключающемся в определении приоритетов просмотра различных областей пространства каждой РЛС системы в соответствии с априорной и текущей информацией, составлении расписания функционирования РЛС системы, излучении зондирующих сигналов каждой РЛС системы в пределах заданных зон обзора в соответствии с расписанием, приеме сигналов, оценке суммарной мощности помех и внутренних шумов и определении на этой основе конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, обнаружении, измерении координат и фильтрации параметров траекторий объектов по отраженным сигналам и излучаемым помехам, построении области неопределенности положения объектов на пункте управления системы как пересечения зон подавления РЛС системы, вычислении координат и фильтрации параметров траекторий объектов-носителей источников помех, объединении траекторий объектов, сопровождаемых по отраженному сигналу и по излучаемой помехе, и грубом определении параметров движения объектов по изменению центра области неопределенности во времени и (или) по траекторным параметрам объектов, сопровождаемых по излучаемой помехе, для обеспечения наилучших условий обнаружения за счет разделения энергопотенциала бортовых средств помех по максимальному числу РЛС на пункте управления радиолокационной системы с заданной периодичностью выбирают группу радиолокационных станций, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования относительно линии курса объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов бортовых средств помех, область неопределенности положения объектов разбивают на подобласти так, чтобы каждая подобласть вписывалась в главные лепестки диаграмм направленности антенн всех выбранных РЛС, назначают время зондирования каждой подобласти выбранными РЛС таким образом, чтобы усредненные по всем возможным положениям обнаруживаемого объекта (объектов) в пределах подобласти и по всем возможным положениям источников помех в пределах всей области неопределенности требуемые временные интервалы излучения помех выбранным РЛС для прикрытия отраженных от объекта сигналов различались минимально, вычисляют угловые координаты зондирований подобластей выбранными РЛС, частоты излучаемых РЛС сигналов выбирают произвольно в пределах частотного поддиапазона бортовых средств помех, причем минимальное различие несущих частот для всех возможных пар из выбранных РЛС должно превышать полусумму значений ширины спектров зондирующих сигналов РЛС, данные о временных, угловых и частотных параметрах зондирования передают на выбранные РЛС.
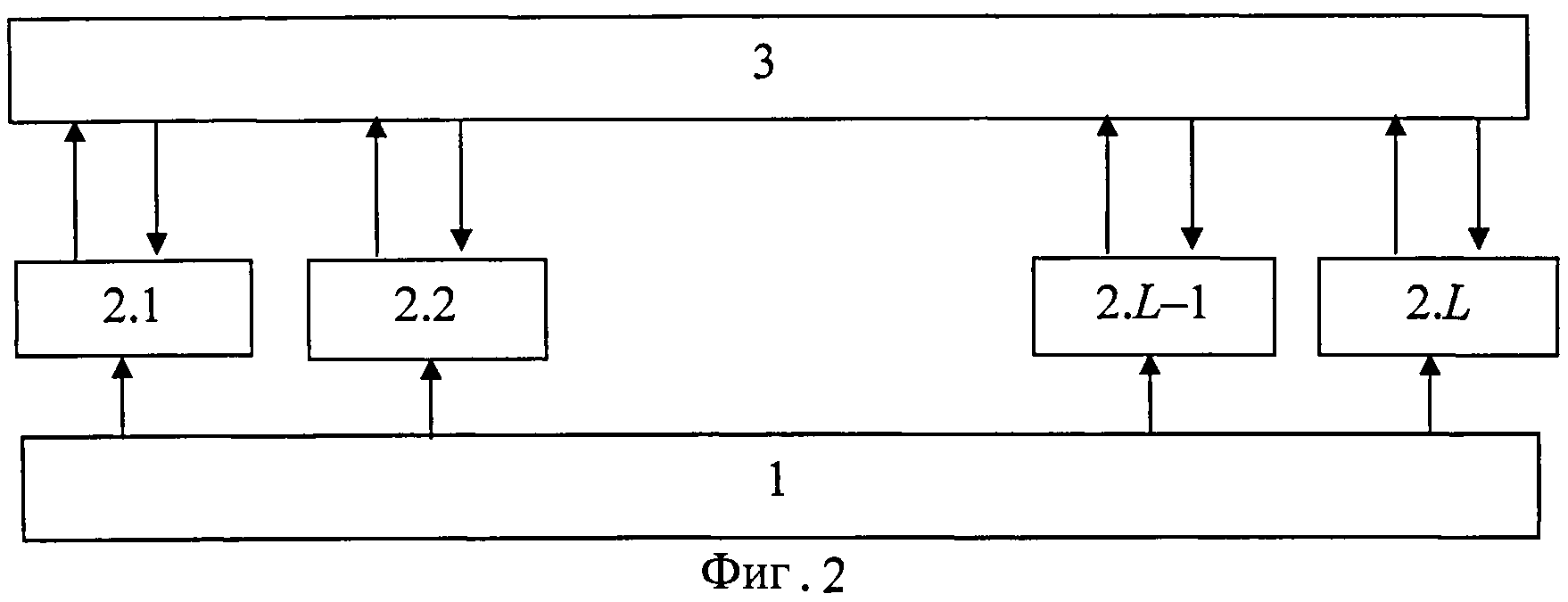
Радиолокационная система, реализующая заявляемый способ (фиг.2), содержит подсистему навигационно-временного обеспечения 1, выходы которой подключены к L радиолокационным станциям 2.1, 2.2, …, 2.L-1, 2.L с управляемыми параметрами излучения, и пункт управления 3. Информационные выходы радиолокационных станций подключены к информационным входам пункта управления, а управляющие входы радиолокационных станций - к выходам пункта управления.
Реализация способа-прототипа состоит в выполнении с заданной периодичностью следующих операций:
1) на основе априорной и текущей информации на пункте управления радиолокационной системы определяются приоритеты просмотра отдельных областей пространства каждой РЛС системы; информация об установленных приоритетах по каналам связи передается на РЛС системы;
2) на основании установленных приоритетов в каждой РЛС осуществляется составление расписания работы РЛС на заданный период времени;
3) в соответствии с индивидуальным расписанием в каждой РЛС осуществляется излучение зондирующих и прием отраженных сигналов, оценка суммарной мощности помех и внутренних шумов и определение на этой основе конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, обнаружение, измерение координат и фильтрация параметров траекторий объектов по отраженным сигналам и излучаемым помехам;
4) результаты вторичной обработки радиолокационной информации передаются по каналам связи на пункт управления радиолокационной системы;
5) на пункте управления радиолокационной системы осуществляется построение области неопределенности положения объектов как пересечения зон подавления РЛС системы, вычисление координат и фильтрация параметров траекторий постановщиков помех, объединение траекторий объектов, сопровождаемых по отраженному сигналу и излучаемой помехе, и грубое определении параметров движения объектов по изменению центра области неопределенности во времени или по траекторным параметрам объектов, сопровождаемых по излучаемой помехе.
Реализация заявляемого способа функционирования радиолокационной системы возможна после первоначального построения области неопределенности согласно способа-прототипа и состоит в выполнении с заданной периодичностью следующих операций:
1) на пункте управления радиолокационной системы:
- выделяется группа из РЛС, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования относительно линии курса объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов бортовых средств помех;
РЛС, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования относительно линии курса объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов бортовых средств помех;
- область неопределенности положения воздушных объектов разбивается на подобластей так, чтобы каждая подобласть находилась в пределах главных лепестков диаграмм направленности антенн выбранных РЛС;
подобластей так, чтобы каждая подобласть находилась в пределах главных лепестков диаграмм направленности антенн выбранных РЛС;
- для каждой из РЛС выделенной группы составляются расписания их функционирования, обеспечивающие согласованный просмотр подобластей таким образом, чтобы усредненные по всем возможным положениям обнаруживаемого объекта (объектов) в пределах n-й подобласти и по всем возможным положениям источников помех в пределах всей области неопределенности требуемые временные интервалы излучения помех выбранным РЛС для прикрытия отраженных от объекта сигналов различались минимально;
- расписания функционирования передаются на выбранные РЛС;
2) в соответствии с индивидуальным расписанием в каждой РЛС осуществляется излучение зондирующих и прием отраженных сигналов, оценка суммарной мощности помех и внутренних шумов и определение на этой основе конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, обнаружение, измерение координат и фильтрация параметров траекторий объектов по отраженным сигналам и излучаемым помехам;
3) результаты вторичной обработки радиолокационной информации передаются по каналам связи на пункт управления радиолокационной системы;
4) на пункте управления радиолокационной системы осуществляется построение (уточнение) области неопределенности положения объектов как пересечения зон подавления РЛС системы, вычисление координат и фильтрация параметров траекторий постановщиков помех, объединение траекторий объектов, сопровождаемых по отраженному сигналу и излучаемой помехе, и грубое определение параметров движения объектов по изменению центра области неопределенности во времени или по траекторным параметрам объектов, сопровождаемых по излучаемой помехе.
Операции 3-5 способа-прототипа и 2-4 предлагаемого способа совпадают.
Детализация оригинальных операций предлагаемого способа для одной области неопределенности состоит в следующем.
При выделении группы РЛС для каждой из РЛС из состава радиолокационной системы проверяются выполнение условий
РЛС из состава радиолокационной системы проверяются выполнение условий
где αℓ, βℓ - углы визирования ℓ-й РЛС относительно направления вектора курса и тангажа объектов при наблюдении из центра области неопределенности; ΔαПП - сектор работы бортового средства помех;  ,
, - нижняя и верхняя несущие частоты ℓ-й РЛС;
- нижняя и верхняя несущие частоты ℓ-й РЛС;  ,
, - нижняя и верхняя частоты поддиапазона рабочих частот бортовых средств помех. Выбранные K РЛС нумеруются
- нижняя и верхняя частоты поддиапазона рабочих частот бортовых средств помех. Выбранные K РЛС нумеруются
Полученная при функционировании радиолокационной системы согласно способа-прототипа область неопределенности Z разбивается на  подобластей Dn,
подобластей Dn,  с координатами условных центров подобластей (xцn, yцn, zцn), наклонной и горизонтальной дальностями от центров подобластей до выбранных РЛС
с координатами условных центров подобластей (xцn, yцn, zцn), наклонной и горизонтальной дальностями от центров подобластей до выбранных РЛС


на основе признака попадания подобласти в целом в главные лепестки диаграмм направленности антенн РЛС
где 
 - угловые отклонения точки с координатами (x, y, z) от линии «k-я РЛС - центр n-й подобласти).
- угловые отклонения точки с координатами (x, y, z) от линии «k-я РЛС - центр n-й подобласти).
На практике разбиение области неопределенности Z на  подобластей может быть выполнено путем проверки условия (8) для точек, принадлежащих области неопределенности Z, с достаточно малой дискретностью
подобластей может быть выполнено путем проверки условия (8) для точек, принадлежащих области неопределенности Z, с достаточно малой дискретностью  ;
;  Алгоритм разбиения может быть построен последовательно. На первом шаге фиксируется центральная точка первой подобласти, за которую может быть приняты координаты центра тяжести области неопределенности, и с использованием (8) с заданной дискретностью строится первая подобласть. На втором шаге оцениваются размеры получившейся на первом шаге подобласти, исходя из полученного результата, выбирается положение условного центра второй подобласти и осуществляется ее построение. Далее процесс повторяется до достижения полного разбиения области неопределенности на подобласти, которые могут частично перекрываться.
Алгоритм разбиения может быть построен последовательно. На первом шаге фиксируется центральная точка первой подобласти, за которую может быть приняты координаты центра тяжести области неопределенности, и с использованием (8) с заданной дискретностью строится первая подобласть. На втором шаге оцениваются размеры получившейся на первом шаге подобласти, исходя из полученного результата, выбирается положение условного центра второй подобласти и осуществляется ее построение. Далее процесс повторяется до достижения полного разбиения области неопределенности на подобласти, которые могут частично перекрываться.
Далее решают задачу назначения времени зондирования каждой подобласти выбранными РЛС. При этом рассматривается наихудший для радиолокационной системы случай, когда средство помех оптимальным образом использует свой временной ресурс [Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. - М.: Радиотехника, 2003, стр.386-387], минимизируя время излучения помех за счет совмещения интервалов времени приема отраженного от объекта сигнала k-й РЛС и интервала воздействия помехи на k-ю РЛС.
При пересечении интервалов создания помех b>1 РЛС с различными несущими частотами, лежащими в пределах одного из поддиапазонов средства помех, мощность помех, приходящаяся на каждую РЛС, уменьшается. Так, если РЛС имеют примерно одинаковые энергетические возможности по обнаружению воздушных объектов, то мощность помех, приходящаяся на каждую из b РЛС, снижается до уровня

где PG - энергопотенциал средства помех в односигнальном режиме; µ(b) - потери за счет многосигнального усиления помех в выходном усилителе мощности средства помех [Справочник по спутниковой связи и вещанию / под. ред. Кантора Л.Я. - М.: Радио и связь, 1983, стр.127-132].
При неполном совпадении интервалов создания помех выбранным РЛС возникает ситуация, когда на части временного интервала приема отраженного сигнала k-й РЛС помеха создается только одной (k-й) РЛС, на части - двум РЛС, трем и т.д. РЛС.
Выберем длительности зондирующих сигналов выбранных РЛС при зондировании области неопределенности
 ,
,
где  - максимальная длительность зондирующего сигнала k-й РЛС.
- максимальная длительность зондирующего сигнала k-й РЛС.
Средняя мощность помех определится в этом случае как

где  - временной промежуток в пределах интервал приема отраженного сигнала k-й РЛС при зондировании n-й подобласти, когда помеха создается b РЛС системы.
- временной промежуток в пределах интервал приема отраженного сигнала k-й РЛС при зондировании n-й подобласти, когда помеха создается b РЛС системы.
Если 
 что достигается при минимальных различиях моментов начала и окончания создания помех выбранным РЛС, то
что достигается при минимальных различиях моментов начала и окончания создания помех выбранным РЛС, то  то есть энергопотенциал помех, приходящийся на каждую РЛС, минимален.
то есть энергопотенциал помех, приходящийся на каждую РЛС, минимален.
Условие минимума энергопотенциала помех, приходящийся на каждую РЛС, необходимо обеспечить при нахождении прикрываемых объектов в n-й подобласти и нахождении средства (средств) помех в области неопределенности. Потребуем, чтобы усредненные по всем возможным положениям обнаруживаемого объекта (объектов) в пределах n-й подобласти и по всем возможным положениям источников помех в пределах всей области неопределенности требуемые временные интервалы излучения помех выбранным РЛС для прикрытия отраженных от объекта сигналов различались минимально. Максимальное совмещение требуемых интервалов создания помех достигается соответствующим выбором времени излучения помех каждой РЛС.
Решение этой задачи может осуществляться, например, пошагово, следующим образом.
На первом шаге определяется номер q опорной РЛС-РЛС, для которой расстояние от нее до условного центра n-й подобласти максимально

и назначаются времена τqn излучения зондирующего сигнала этой РЛС.
На последующих шагах оптимизируется временная задержка Δτkn=τkn-τqn излучения зондирующего сигнала k=1, 2, …, q-1, q+1, …, K оставшихся из выбранных РЛС по отношению к опорной q-й РЛС.
шагах оптимизируется временная задержка Δτkn=τkn-τqn излучения зондирующего сигнала k=1, 2, …, q-1, q+1, …, K оставшихся из выбранных РЛС по отношению к опорной q-й РЛС.
Исходя из геометрии задачи, требуемый для полного совпадения с отраженным сигналом момент времени начала излучения помех k-й РЛС при условиях, что бортовое средство помех находится в точке с координатами (xП, yП, zП)∈Z, воздушный объект - в точке с координатами (x, y, z)∈Dn составит
начала излучения помех k-й РЛС при условиях, что бортовое средство помех находится в точке с координатами (xП, yП, zП)∈Z, воздушный объект - в точке с координатами (x, y, z)∈Dn составит

Оптимальная временная задержка излучения k-й РЛС по отношению к опорной при зондировании n-й подобласти выбирается в соответствии с выражением

где

- разность требуемого времени начала создания помех k-й РЛС по отношению к опорной, усредненная при всех возможных положениях объекта в пределах n-й подобласти и средства помех - в пределах области неопределенности; dDn=dxdydz; dZ=dxПdyПdzП; VZ, SZ - объем всей области неопределенности и ее n-й подобласти.
В результате последовательной оптимизации формируются значения  , которые представляют собой моменты излучения зондирующих сигналов выбранными РЛС. При этом, в соответствии с (13), будут обеспечены минимальные различия требуемых моментов начала и окончания создания помех k-й РЛС в соответствии с опорной, то есть максимальное совмещение требуемых интервалов создания помех выбранным РЛС.
, которые представляют собой моменты излучения зондирующих сигналов выбранными РЛС. При этом, в соответствии с (13), будут обеспечены минимальные различия требуемых моментов начала и окончания создания помех k-й РЛС в соответствии с опорной, то есть максимальное совмещение требуемых интервалов создания помех выбранным РЛС.
В случае, когда размеры области неопределенности достаточно малы, выбранные РЛС размещены достаточно компактно и (или) в РЛС используются зондирующие сигналы большой длительности, будет выполнено условие  то есть требуемые интервалы создания помех различным РЛС будут практически совпадать. На практике указанные требования могут быть легко выполнены, например, для РЛС воздушного базирования за счет соответствующего выбора траекторий полета их носителей, а также в импульсно-доплеровских РЛС и импульсных РЛС со сложными зондирующими сигналами длительностью сотни микросекунд-единиц миллисекунд.
то есть требуемые интервалы создания помех различным РЛС будут практически совпадать. На практике указанные требования могут быть легко выполнены, например, для РЛС воздушного базирования за счет соответствующего выбора траекторий полета их носителей, а также в импульсно-доплеровских РЛС и импульсных РЛС со сложными зондирующими сигналами длительностью сотни микросекунд-единиц миллисекунд.
Далее вычисляются азимут  и угол места
и угол места  главного лепестка диаграммы направленности антенны k-й РЛС при зондировании n-й области
главного лепестка диаграммы направленности антенны k-й РЛС при зондировании n-й области
 ;
;
Частоты зондирующих сигналов выбирают произвольно, таким образом, чтобы при условии создания прицельных помех с шириной спектра, равной ширине спектра зондирующего сигнала, исключить пересечение спектров помех

где ΔFci - ширина спектра сигнала i-й РЛС.
Полученные расписания функционирования  выбранных РЛС в виде времен, длительностей сигналов τc, угловых координат
выбранных РЛС в виде времен, длительностей сигналов τc, угловых координат  ,
,  и частот ƒkn зондирований
и частот ƒkn зондирований  подобластей области неопределенности передаются с пункта управления радиолокационной системы на выбранные РЛС.
подобластей области неопределенности передаются с пункта управления радиолокационной системы на выбранные РЛС.
На фиг.3 и 4 соответственно приведены пример пространственной ситуации при реализации способа и результаты разбиения области неопределенности размером  ;
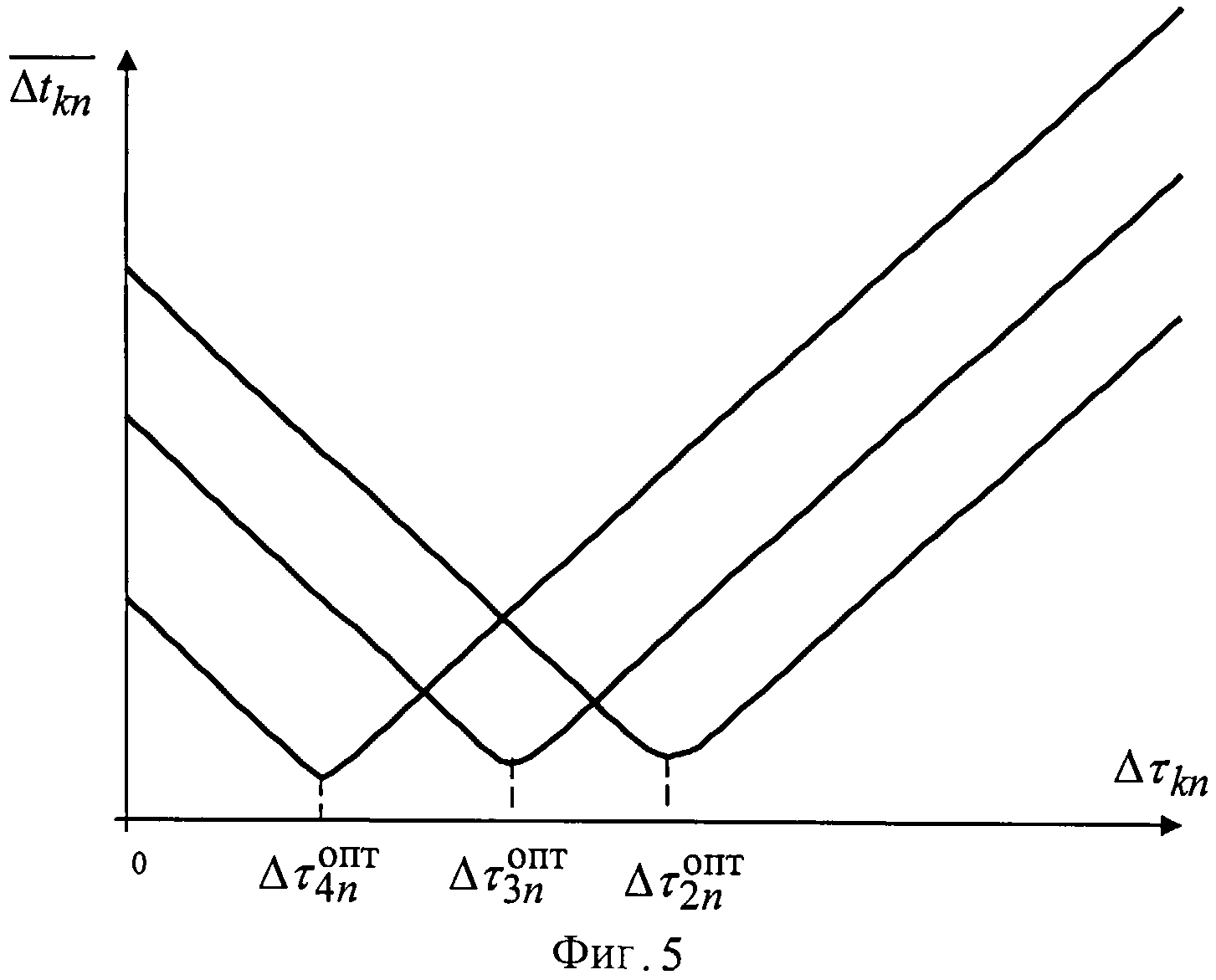
;  (плоскостной случай) на подобласти при наличии K=4 выбранных РЛС системы. На фиг.5 приведены зависимости разности начала создания помех k-й РЛС в сравнении с опорной, усредненной по всем возможным положениям объекта временной задержки излучения k-й РЛС по отношению к опорной при зондировании n-й подобласти.
(плоскостной случай) на подобласти при наличии K=4 выбранных РЛС системы. На фиг.5 приведены зависимости разности начала создания помех k-й РЛС в сравнении с опорной, усредненной по всем возможным положениям объекта временной задержки излучения k-й РЛС по отношению к опорной при зондировании n-й подобласти.
Проведем иллюстрацию выигрыша предлагаемого способа функционирования радиолокационной системы в сравнении со способом-прототипом по показателю «коэффициент (увеличения дальности обнаружения воздушных объектов выбранными РЛС радиолокационной системы при заданной вероятности правильного обнаружения и фиксированной вероятности ложной тревоги», определяемый как

где R, - дальность обнаружения объекта выбранными РЛС в предлагаемом способе и средняя дальность обнаружения в способе-прототипе соответственно.
- дальность обнаружения объекта выбранными РЛС в предлагаемом способе и средняя дальность обнаружения в способе-прототипе соответственно.
Средняя дальность обнаружения воздушного объекта любой из выбранных РЛС для «способа-прототипа»

где
 - дальность обнаружения объекта любой из выбранных РЛС при равномерном распределении энергопотенциала средства помех на подавление i радиолокационных станций на различных несущих частотах; Pc, Gc - импульсная мощность и коэффициент усиления антенны РЛС; σ - эффективная поверхность рассеяния объекта; ΔF - ширина спектра помех;
- дальность обнаружения объекта любой из выбранных РЛС при равномерном распределении энергопотенциала средства помех на подавление i радиолокационных станций на различных несущих частотах; Pc, Gc - импульсная мощность и коэффициент усиления антенны РЛС; σ - эффективная поверхность рассеяния объекта; ΔF - ширина спектра помех;

- вероятность создания помех ровно i радиолокационным станциям при условии, что создание помех осуществляется хотя бы одной радиолокационной станции; pi - вероятность одновременного подавления i РЛС, определяемая (2).
Дальность обнаружения в предлагаемом способе определяется (18) при i=K.
Тогда, из (16)-(19) с учетом 2, следует, что коэффициент увеличения дальности обнаружения
где 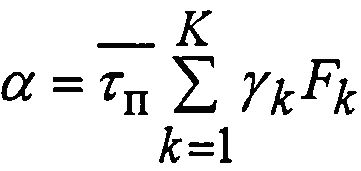 .
.
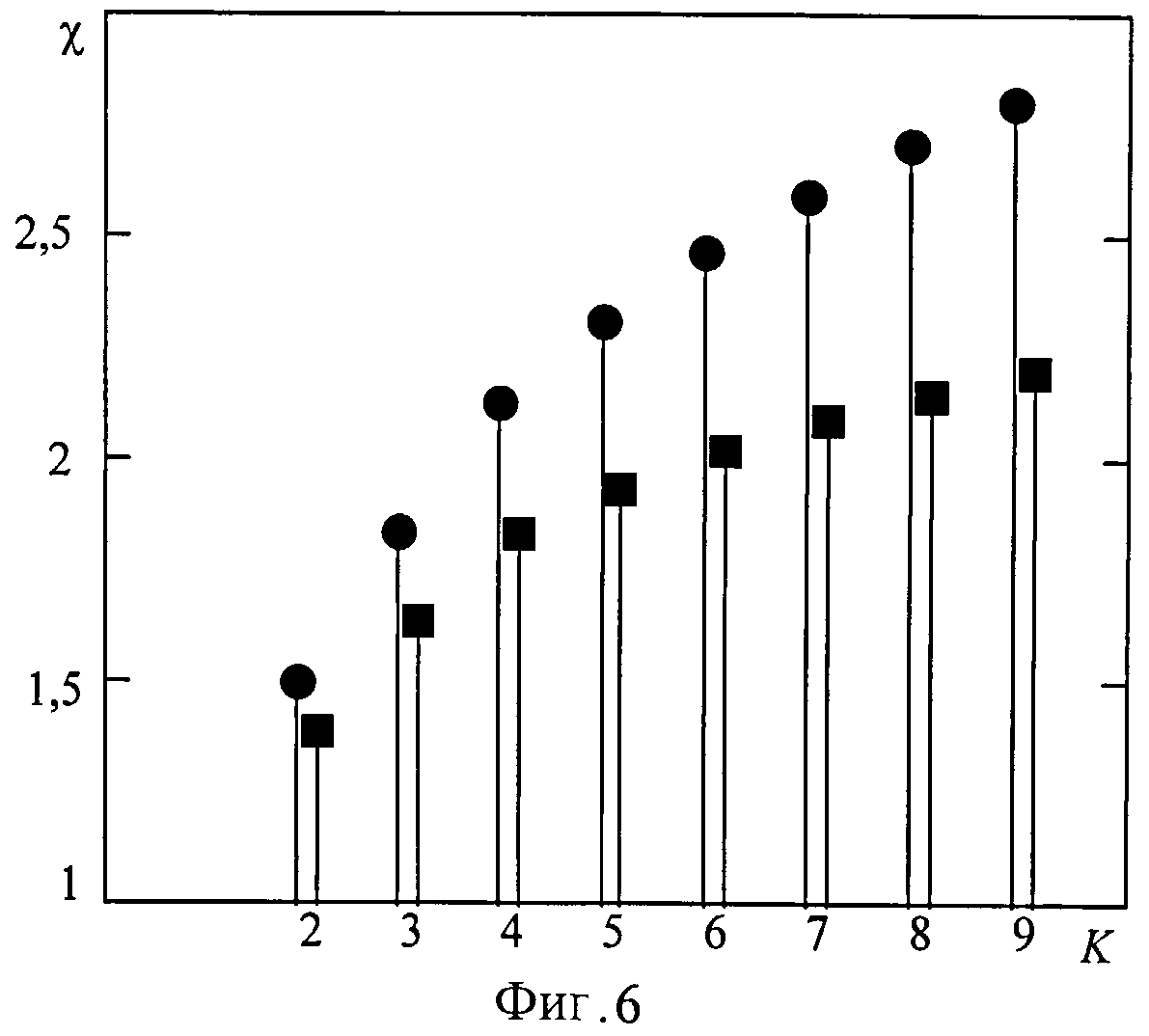
На фиг.6 приведены результаты расчетов коэффициента увеличения дальности обнаружения воздушных объектов при реализации предлагаемого способа в зависимости от числа K=L РЛС с составе системы для случая, когда в способе-прототипе создание помех реализуется только при просмотре РЛС областей неопределенности, на приоритетный просмотр области неопределенности выделяются доли энергетического ресурса РЛС γk=0,1 и 0,25 (круглые и квадратные маркеры соответственно), частота осмотра угловых направлений Fk=100 Гц и среднее время создания помех  мс. Полагалось, что величина коэффициента энергетических потерь в сравнении с односигнальным режимом составляет 1…1,5 дБ [Справочник по спутниковой связи и вещанию / под. ред. Кантора Л.Я. - М.: Радио и связь, 1983, стр.127], при этом принималось µ(1)=0дБ; µ(2)=1 дБ; µ(3)=1,25 дБ; µ(>3)=1,5 дБ.
мс. Полагалось, что величина коэффициента энергетических потерь в сравнении с односигнальным режимом составляет 1…1,5 дБ [Справочник по спутниковой связи и вещанию / под. ред. Кантора Л.Я. - М.: Радио и связь, 1983, стр.127], при этом принималось µ(1)=0дБ; µ(2)=1 дБ; µ(3)=1,25 дБ; µ(>3)=1,5 дБ.
Как следует из результатов расчетов, предлагаемый способ обеспечивает значительное, в 1,4…2,7 раза для приведенной ситуации, увеличение дальности обнаружения воздушных объектов выбранными РЛС радиолокационной системы. Кроме того, так как отношение «сигнал/шум» по напряжению при обнаружении воздушных объектов, прикрываемых бортовыми средствами помех, линейно зависит от дальности [Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. - М.: Радиотехника, 2003, стр.44-48], а среднеквадратическая ошибка определения координат воздушных объектов обратно пропорционально отношению «сигнал/шум» по напряжению, то применение предлагаемого способа обеспечивает увеличение точности измерения координат и сопровождения воздушных объектов в рассмотренном примере также в 1,4…2,7 раза.
Предлагаемый способ является новым, поскольку из общедоступных сведений неизвестен способ функционирования радиолокационной системы на базе РЛС с управляемыми параметрами излучения при обнаружении группы воздушных объектов, прикрываемых бортовыми средствами помех, заключающийся в определении приоритетов просмотра различных областей пространства каждой РЛС системы в соответствии с априорной и текущей информацией, составлении расписания функционирования РЛС системы, излучении зондирующих сигналов каждой РЛС системы в пределах заданных зон обзора в соответствии с расписанием, приеме сигналов, оценке суммарной мощности помех и внутренних шумов и определении на этой основе конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, обнаружении, измерении координат и фильтрации параметров траекторий объектов по отраженным сигналам и излучаемым помехам, построении области неопределенности положения объектов на пункте управления системы как пересечения зон подавления РЛС системы, вычислении координат и фильтрации параметров траекторий объектов-носителей источников помех, объединении траекторий объектов, сопровождаемых по отраженному сигналу и по излучаемой помехе, и грубом определении параметров движения объектов по изменению центра области неопределенности во времени и (или) по траекторным параметрам объектов, сопровождаемых по излучаемой помехе, отличающийся тем, что на пункте управления радиолокационной системы с заданной периодичностью выбирают группу радиолокационных станций, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования относительно линии курса объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов бортовых средств помех, область неопределенности положения объектов разбивают на подобласти так, чтобы каждая подобласть находилась в пределах главных лепестков диаграмм направленности антенн выбранных РЛС, назначают время зондирования каждой подобласти выбранными РЛС таким образом, чтобы усредненные по всем возможным положениям обнаруживаемого объекта (объектов) в пределах подобласти и по всем возможным положениям источников помех в пределах всей области неопределенности требуемые временные интервалы излучения помех выбранным РЛС для прикрытия отраженных от объекта сигналов различались минимально, вычисляют угловые координаты зондирований подобластей выбранными РЛС, частоты излучаемых РЛС сигналов выбирают произвольно в пределах частотного поддиапазона бортовых средств помех, причем минимальное различие несущих частот для всех возможных пар из выбранных РЛС должно превышать полусумму значений ширины спектров зондирующих сигналов РЛС, данные о временных, угловых и частотных параметрах зондирования передают на выбранные РЛС.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций - выбор группы радиолокационных станций, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования относительно линии курса объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов бортовых средств помех, разбиение области неопределенности положения объектов на подобласти так, чтобы каждая подобласть находилась в пределах главных лепестков диаграмм направленности антенн выбранных РЛС, назначение времен зондирования каждой подобласти выбранными РЛС таким образом, чтобы усредненные по всем возможным положениям обнаруживаемого объекта (объектов) в пределах подобласти и по всем возможным положениям источников помех в пределах всей области неопределенности требуемые временные интервалы излучения помех выбранным РЛС для прикрытия отраженных от объекта сигналов различались минимально, вычисление угловых координат и назначение частот зондирований подобластей выбранными РЛС исходя из непересечения главных лепестков спектров зондирующих сигналов РЛС, передача данных о временных, угловых и частотных параметрах зондирования на выбранные РЛС обеспечивает повышение качества обнаружения и сопровождения воздушных объектов, прикрываемых бортовыми средствами помех.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью радиолокационные станции с управляемыми характеристиками излучения, средства связи, навигационно-временного обеспечения и средства вычислительной техники. Необходимые для реализации способа данные о секторах работы бортовых средств помех могут быть взяты из справочной литературы или оценены по известным аналогам.
Технико-экономическая эффективность предложенного способа заключается в увеличении дальности и точности сопровождения воздушных объектов, прикрываемых бортовыми средствами помех.
Способ функционирования радиолокационной системы на базе радиолокационных станций (РЛС) с управляемыми параметрами излучения при обнаружении группы воздушных объектов, прикрываемых бортовыми средствами помех, заключающийся в определении приоритетов просмотра различных областей пространства каждой РЛС системы в соответствии с априорной и текущей информацией, составлении расписания функционирования РЛС системы, излучении зондирующих сигналов каждой РЛС системы в пределах заданных зон обзора в соответствии с расписанием, приеме сигналов, оценке суммарной мощности помех и внутренних шумов и определении на этой основе конфигурации зон подавления РЛС, в пределах которых отношение сигнал/(помеха + шум) при обнаружении объектов с заданной эффективной поверхностью рассеяния менее порогового, обнаружении, измерении координат и фильтрации параметров траекторий объектов по отраженным сигналам и излучаемым помехам, построении области неопределенности положения объектов на пункте управления системы как пересечения зон подавления отдельных РЛС, вычислении координат и фильтрации параметров траекторий объектов-носителей источников помех, объединении траекторий объектов, сопровождаемых по отраженному сигналу и по излучаемой помехе, и грубом определении параметров движения объектов по изменению центра области неопределенности во времени и (или) по траекторным параметрам объектов, сопровождаемых по излучаемой помехе, отличающийся тем, что на пункте управления радиолокационной системы с заданной периодичностью выбирают группу РЛС, несущие частоты которых находятся в пределах одного из поддиапазонов бортовых средств помех, а углы визирования относительно линии курса объектов при наблюдении из центра области неопределенности не превышают полуширины рабочих секторов бортовых средств помех, разбивают область неопределенности положения объектов на подобласти так, чтобы каждая подобласть вписывалась в пределы главных лепестков диаграмм направленности антенн выбранных РЛС, длительности зондирующих сигналов выбранных РЛС определяют одинаковыми, назначают время зондирования каждой подобласти выбранными РЛС таким образом, чтобы усредненные по всем возможным положениям обнаруживаемого объекта (объектов) в пределах подобласти и по всем возможным положениям источников помех в пределах всей области неопределенности требуемые временные интервалы излучения помех выбранным РЛС для прикрытия отраженных от объекта сигналов различались минимально, вычисляют угловые координаты зондирований выбранными РЛС, частоты излучаемых РЛС сигналов выбирают произвольно в пределах частотного поддиапазона бортовых средств помех, причем минимальное различие несущих частот для всех возможных пар из выбранных РЛС должно превышать полусумму значений ширины спектров зондирующих сигналов РЛС, данные о временных, угловых и частотных параметрах зондирования передают на выбранные РЛС.

Решетка дипольных нанолазеров
Система управления камерой сгорания изменяемой геометрии газотурбинного двигателя летательного аппарата
Теплообменник
Устройство конвейерного аналого-цифрового преобразования
Способ пространственно-временной обработки изображений на основе матриц фоточувствительных приборов с зарядовой связью
Способ светолокационного измерения высоты облачных слоев
Устройство для измерения коэффициента усиления антенн в натурных условиях
Транспортное средство для вытаскивания застрявших и аварийных автомобилей
Свч-способ определения осажденной влаги в жидких углеводородах
Свч-способ определения осажденной влаги в жидких углеводородах
Решетка дипольных нанолазеров
Система управления камерой сгорания изменяемой геометрии газотурбинного двигателя летательного аппарата
Теплообменник
Устройство конвейерного аналого-цифрового преобразования
Способ пространственно-временной обработки изображений на основе матриц фоточувствительных приборов с зарядовой связью
Способ светолокационного измерения высоты облачных слоев
Устройство для измерения коэффициента усиления антенн в натурных условиях
Транспортное средство для вытаскивания застрявших и аварийных автомобилей
Свч-способ определения осажденной влаги в жидких углеводородах
Свч-способ определения осажденной влаги в жидких углеводородах

