Результат интеллектуальной деятельности: САМОХОДНАЯ РАБОЧАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ
Вид РИД
Изобретение
Изобретение относится к промышленным и сельскохозяйственным тракторам, бульдозерам, погрузчикам, автогрейдерам и другим гусеничным и колесным самоходным рабочим машинам с электромеханической трансмиссией, предназначенным для выполнения землеройных, строительных, дорожных, сельскохозяйственных и других работ.
Известен промышленный гусеничный трактор с электрической трансмиссией, содержащий силовой генератор с блоком возбуждения, тяговый электродвигатель и систему управления с панелью контроля и сигнализации, а также преобразователь частоты. Силовой генератор на этом тракторе выполнен синхронным, а тяговый электродвигатель асинхронным [1], [2].
Его недостатком является повышенная масса трактора, обусловленная применением асинхронного тягового электродвигателя.
Известен также гусеничный трактор с электрической трансмиссией, содержащий двигатель внутреннего сгорания, силовой генератор, два тяговых электродвигателя, блок управления, размещенные в раме трактора, а также бортовые редукторы и ходовую часть с ведущими и натяжными колесами. Каждый тяговый электродвигатель выполнен в едином блоке с бортовым редуктором и расположен на единой поперечной оси с ним и ведущим колесом ходовой части трактора [3].
Недостатком этого трактора является пониженный клиренс (дорожный просвет), что обусловлено расположением каждого тягового электродвигателя, имеющего большие габаритные размеры, на одной поперечной оси с соответствующим бортовым редуктором и ведущим колесом (звездочкой) ходовой части трактора. В этом случае расстояние между опорной поверхностью и нижней точкой центральной части трактора ограничивается низко расположенными нижними поверхностями тяговых электродвигателей.
Наиболее близкой к предложенной является самоходная рабочая машина с электрической силовой передачей, включающая в себя двигатель, выполненный с возможностью получения механической энергии, и соединенный с ним генератор, а также, по меньшей мере, один электродвигатель, функционально соединенный с генератором, множество элементов привода и, по меньшей мере, один силовой электронный модуль, выполненный с возможностью управления двигателем и/или генератором. По меньшей мере, один электродвигатель выполнен с возможностью передачи крутящего момента к элементам привода [4].
Недостатком этой машины является ее пониженная курсовая устойчивость.
Обусловлено это следующим. Самоходная рабочая машина отличается от транспортной машины, например от автомобиля, тем, что кроме собственного передвижения она совершает определенную работу. Например, бульдозер или автогрейдер осуществляет разработку и перемещение грунта с помощью рабочего оборудования - отвала. При этом точка приложения результирующей силы резания и перемещения грунта к отвалу находится, как правило, не в центре отвала. Ее положение зависит от неровностей поверхности грунта и неравномерности его плотности, величины перекоса отвала и других факторов. В результате этого на самоходной рабочей машине, в отличие от транспортной машины, результирующая сила сопротивления ее передвижению расположена вне плоскости продольной симметрии машины. Это приводит к возникновению момента сил, вызывающих поворот машины. У бульдозера, например, различие тяговых усилий левой и правой гусеницы может достигать 30%. В процессе работы машины это приводит к потере ее курсовой устойчивости - к постоянному отклонению направления движения машины от прямолинейного. Для компенсации такого «увода» машины в сторону машинист вынужден периодически воздействовать на органы управления поворотом машины, что приводит к ухудшению условий труда машиниста (повышению напряженности его труда), а также к дополнительным потерям тяговой мощности машины.
К недостаткам известного технического решения относятся также повышенные габаритные размеры генератора и электродвигателя, что обусловлено их работой на относительно низких скоростях вращения их роторов.
Основным техническим результатом, на достижение которого направлено изобретение во всех вариантах его исполнения, является повышение курсовой устойчивости самоходной рабочей машины.
Дополнительными техническими результатами являются улучшение условий труда машиниста, повышение тяговой мощности самоходной рабочей машины и уменьшение габаритных размеров генератора и электродвигателя.
На самоходной рабочей машине (тракторе, бульдозерно-рыхлительном агрегате, автогрейдере, погрузчике, скрепере и т.д.) с электромеханической трансмиссией, содержащей двигатель внутреннего сгорания, соединенный с генератором, один или несколько тяговых электродвигателей трансмиссии, соединенных с генератором посредством одного или нескольких электронных модулей, приспособленных для управления двигателем и/или электромашинами трансмиссии, бортовые редукторы, связанные с ведущими колесами или гусеницами машины, причем один или несколько электродвигателей непосредственно или через дополнительные передаточные устройства механически соединен/соединены с бортовыми редукторами, указанные технические результаты достигаются за счет соединения двигателя с генератором через повышающий редуктор. В другом варианте реализации машины эти технические результаты достигаются за счет применения, по меньшей мере, одного электродвигателя, приспособленного для работы при угловой скорости его ротора, не менее чем в два раза превышающей максимальную угловую скорость вала двигателя и/или ротора генератора, а также создающего крутящий момент, обеспечивающий движение машины во всем диапазоне ее рабочих и транспортных скоростей без изменения передаточного отношения бортовых редукторов и дополнительного передаточного устройства. Еще одним вариантом реализации машины, обеспечивающим достижение указанных технических результатов, является оснащение, по меньшей мере, одного электродвигателя или генератора маховиком, прикрепленным к его валу или ротору или встроенным в этот ротор.
В частных вариантах реализации изобретения для достижения указанных технических результатов на самоходной рабочей машине дополнительно:
а) устанавливается прицепное устройство, вал отбора мощности (ВОМ) или рабочее оборудованием, причем ВОМ или рабочее оборудование имеет механический, электромеханический или гидравлический привод его вращения или перемещения, соответственно, от двигателя, дополнительного электродвигателя, гидромотора или гидроцилиндра, при этом, в случае применения электромеханического или гидравлического привода, на машине устанавливается дополнительный генератор или насос, механически связанный с двигателем;
б) один или несколько электродвигателей имеет/имеют максимальную угловую скорость ротора, не менее чем 10000 об/мин или не менее чем в пять раз превышающую максимальную угловую скорость вала двигателя и/или генератора;
в) по меньшей мере, один электродвигатель выполнен в виде синхронного электродвигателя с постоянными магнитами на роторе, или вентильно-индукторного электродвигателя, или частотно-управляемого асинхронного электродвигателя;
г) машина оснащена дополнительным электрическим соединителем, соединенным с генератором, который выполнен трехфазным с выходным напряжением 220/380 В переменного тока 50 Гц и приспособлен для питания внешних потребителей;
д) электронный модуль выполнен с возможностью подключения по электрическому кабелю к внешней трехфазной электрической сети с напряжением 220/380 В переменного тока 50 Гц, а также с возможностью преобразования и последующего использования энергии внешней сети для работы машины;
е) генератор выполнен с возможность работы в режиме электродвигателя и приспособлен для запуска двигателя от внешней электрической сети, подключаемой с использованием электрического кабеля, или, по меньшей мере, от одного электродвигателя, выполненного с возможностью работы в режиме генератора при торможении машины или ее движении под уклон;
ж) бортовые редукторы выполнены обратимыми с возможностью приведения во вращение ротора, по меньшей мере, одного электромотора при буксировке машины или при ее движении под уклон;
з) по меньшей мере, один электродвигатель оснащен электромагнитным тормозом, а какой-либо электронный модуль выполнен с возможностью включения этого тормоза при необходимости остановки машины и/или предотвращения ее движения под уклон;
и) по меньшей мере, один электронный модуль содержит микропроцессорный контроллер и соединенный с ним преобразователь частоты или электронный коммутатор электродвигателя;
к) по меньшей мере, один электродвигатель, генератор или электронный модуль выполнен с жидкостным охлаждением;
л) машина содержит, по меньшей мере, один аппарат управления движением машины, соединенный с электронным модулем, приспособленным для управления двигателем, генератором и/или, по меньшей мере, одним электродвигателем, таким образом, чтобы скорость движения машины поддерживалась в соответствии с величиной скорости, заданной аппаратом управления, если мощности двигателя достаточно для поддержания этой скорости при текущем значении тяговой нагрузки машины, либо с возможностью управления из условия достижения максимальной тяговой мощности машины, если при текущей величине ее нагрузки мощности двигателя недостаточно для поддержания заданной скорости движения машины;
м) машина дополнительно оснащена накопителем электрической энергии, выполненным в виде аккумулятора и/или суперконденсатора, при этом, по меньшей мере, один электронный модуль приспособлен для передачи электрической энергии от генератора или, по меньшей мере, от одного электродвигателя, выполненного с возможностью работы в режиме генератора во время торможения машины или ее движения под уклон, в накопитель энергии, а также последующей передачи этой накопленной энергии в электродвигатель в рабочем режиме машины;
н) дополнительное передаточное устройство реализовано в виде устройства дифференциального управления, которое функционально соединено с электродвигателем и бортовыми редукторами и приспособлено для перераспределения крутящего момента, передаваемого на каждый бортовой редуктор, или в виде главной передачи, выходы которой соединены с бортовыми редукторами с помощью бортовых фрикционов;
о) машина содержит два электродвигателя, функционально соединенных с бортовыми редукторами, при этом один или два электронных модуля приспособлены для управления этими электродвигателями с возможностью изменения скорости и направления движения машины.
Альтернативные отличительные признаки независимого пункта формулы данного изобретения при их отдельной реализации, а также при реализации в различных комбинациях (сочетаниях) обеспечивают достижение одного и того же технического результата - повышение курсовой устойчивости самоходной рабочей машины.
Это обусловлено тем, что реализация этих отличительных признаков приводит к увеличению гироскопического эффекта роторов генератора и электродвигателей. Соединение двигателя с генератором через повышающий редуктор приводит к увеличению скорости вращения его ротора и, соответственно, момента количества его движения. К этому же результату приводит применение высокоскоростных электродвигателей, работающих при угловых скоростях их роторов, не менее чем в два раза превышающих максимальную угловую скорость вала двигателя и/или ротора генератора. Увеличение массы ротора генератора или электродвигателя путем их реализации со встроенным маховиком или с маховиком, прикрепленным к его валу, также приводит к увеличению момента количества его движения.
Свойством такого ротора генератора или электродвигателя, имитирующего гироскоп, является не только способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил, но и способность эффективно сопротивляться действию внешних моментов сил. Эффективность такого сопротивления возрастает при увеличении угловой скорости и момента инерции ротора. Именно на это направлено предложенное техническое решение.
Сопротивление вращающихся роторов воздействию внешних моментов сил приводит к частичной компенсации момента сил, обусловленных приложением результирующей силы сопротивления передвижению самоходной рабочей машины вне плоскости ее продольной симметрии и вызывающих неуправляемый поворот машины. Это приводит к повышению курсовой устойчивости движения машины.
Повышение этой устойчивости приводит к снижению частоты воздействия машиниста на органы управления для коррекции направления движения машины, что приводит к улучшению условий труда машиниста. Стабилизация направления движения самоходной рабочей машины без воздействия на механизмы ее поворота уменьшает затраты энергии на повороты и, соответственно, обеспечивает повышение средних значений тяговой мощности и производительности машины. Переход на повышенные скорости вращения роторов приводит также к уменьшению габаритных размеров генератора и электродвигателей.
Из уровня техники неизвестно использование гироскопического эффекта вращающихся роторов генератора и электродвигателей электромеханической трансмиссии самоходной рабочей машины с целью:
а) повышения курсовой устойчивости самоходной рабочей машины;
б) улучшения условий труда машиниста;
в) повышения тяговой мощности самоходной рабочей машины.
Из уровня техники не известно также применение в электромеханической трансмиссии самоходных рабочих машин высокоскоростных генераторов и электродвигателей, работающих при скоростях вращения роторов, более чем в два раза превышающих скорость вращения двигателя, с целью уменьшения их габаритных размеров.
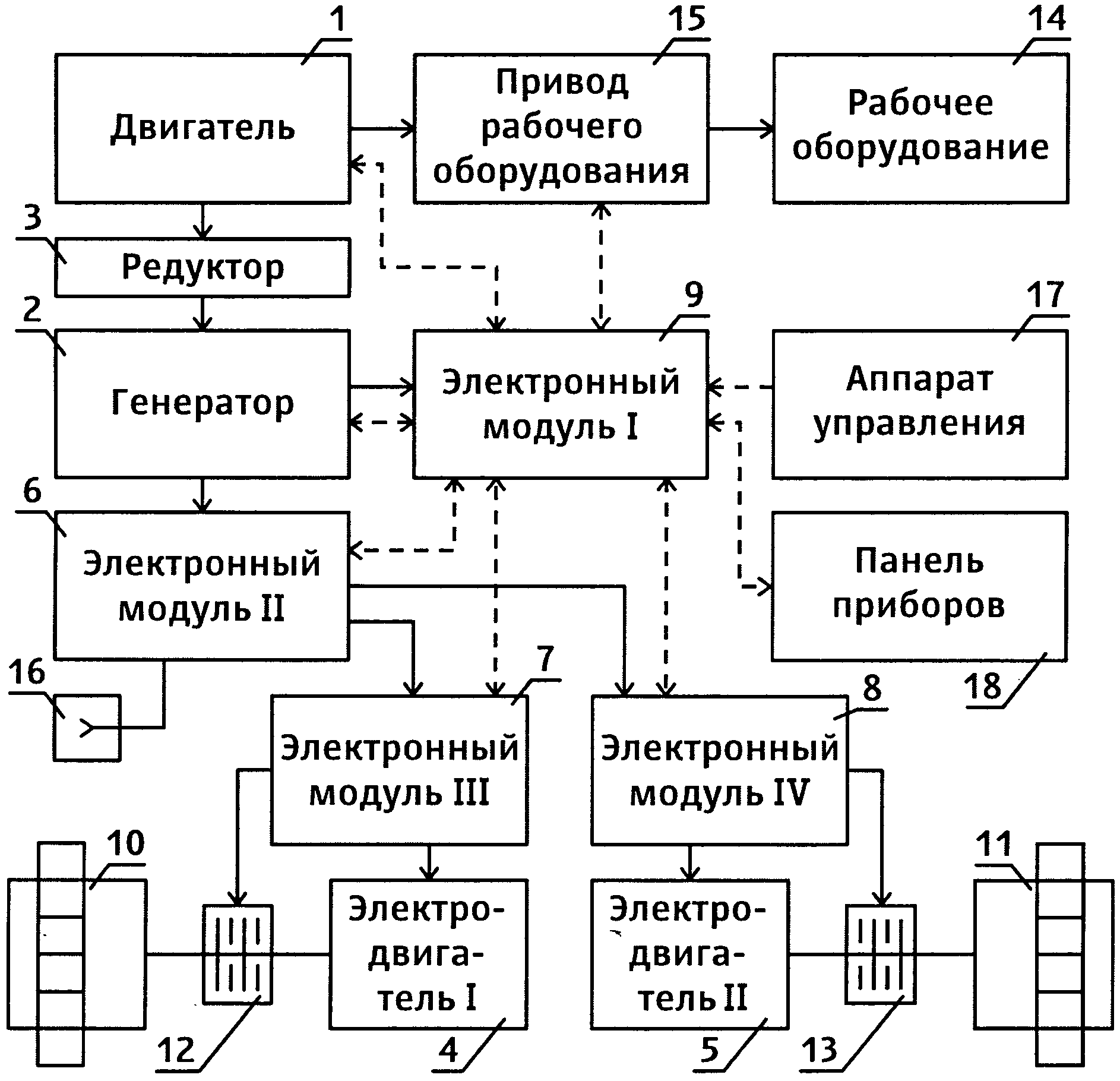
На чертеже представлен пример реализации самоходной рабочей машины (трактора, бульдозерного агрегата, автогрейдера, погрузчика, скрепера и т.п.).
Машина содержит двигатель 1, генератор 2, соединенный с двигателем 1 непосредственно через упругую муфту, или повышающий редуктор 3, электродвигатели 4, 5, электрически соединенные с генератором 2 через один или несколько электронных модулей 6, 7 и 8.
По меньшей мере, один из этих модулей 6, 7, 8 или дополнительно установленный электронный модуль 9 содержит микроконтроллер и реализует функции управления двигателем 1, генератором 2 и электродвигателями 4, 5.
Линии передачи информационных сигналов между электронными модулями 6, 7, 8, 9, показанные на чертеже пунктирными линиями, могут быть выполнены с использованием интерфейсов CAN, RS-485, LIN и т.д. Силовые линии связи с электронными модулями показаны сплошными линиями.
Электронный модуль 6 может быть выполнен в виде выпрямителя, а электронные модули 7 и 8 - в виде силовых частотных преобразователей, инверторов, коммутаторов, контроллеров и т.п., приспособленных для управления бесколлекторными электродвигателями 4, 5.
На машине возможно объединение электронных модулей в единый блок (модуль) либо их раздельное исполнение в зависимости от выполняемых функций и требований к компоновке машины. Возможно также конструктивное объединение электронных модулей с электродвигателями 4, 5 и/или с генератором 2.
Электронные модули 6, 7, 8 и 9, генератор 2 и электродвигатели 4, 5 могут иметь систему жидкостного охлаждения, объединенную, в частности, с системой охлаждения двигателя 1.
Электродвигатели 4, 5 соединены с бортовыми редукторами 10, 11, связанными с ведущими колесами или гусеницами машины. Электродвигатели 4, 5 или бортовые редукторы 10, 11 имеют встроенные нормально замкнутые электрически управляемые стояночные тормоза 12, 13, например электромагнитные с дисковыми или ленточными фрикционными элементами. Эти тормоза могут быть также выполнены в виде отдельных устройств и присоединены к соответствующим валам электродвигателей или входным валам бортовых редукторов 10, 11.
Электронные модули 7, 9 (или иные модули) обеспечивают включение тормозов 12, 13 для предотвращения движения машины под уклон, а также для торможения и остановки машины, если по каким-либо причинам интенсивность электрического торможения машины оказывается недостаточной.
Машина может иметь один электродвигатель 4, который соединяется с бортовыми редукторами 10, 11 через дополнительное передаточное устройство (на чертеже не показано). Оно выполнено в виде главной передачи, выходы которой соединены с бортовыми редукторами 10, 11 через бортовые фрикционы (на чертеже не показаны) и тормоза 12, 13, либо в виде устройства дифференциального управления, которое обеспечивает передачу крутящего момента электродвигателя 4 на бортовые редукторы 10, 11 и перераспределение этого крутящего момента между ними с целью реализации поворота машины с различными радиусами. Управление этим устройством может осуществляться с помощью дополнительного электродвигателя, соединенного с одним из электронных модулей 6, 7, 8, 9.
Если машина содержит два электродвигателя 4, 5 (вариант, показанный на чертеже), то они соединены с электронными модулями 7, 8, которые осуществляют управление электродвигателем 4, 5 с возможностью изменения как скорости, так и направления движения машины. В этом случае установка главной передачи или устройства дифференциального управления не требуется.
Машина может иметь более двух (4, 6 и т.п.) ведущих колес с соответствующими бортовыми редукторами. При этом бортовой редуктор каждого колеса может быть аналогичным образом соединен с соответствующим электродвигателем (в этом случае числе электродвигателей на машине увеличивается до 4, 6 и т.д.) либо все бортовые редукторы соединяются с одним электродвигателем с помощью соответствующего передаточного устройства (механических передач).
Машина дополнительно оснащена прицепным устройством, валом отбора мощности (ВОМ) или рабочим оборудованием 14.
ВОМ или рабочее оборудование 14 имеет механический, гидромеханический или электромеханический привод 15 его вращения или перемещения с использованием, соответственно, механического соединения с двигателем 1, дополнительного электродвигателя, электрически соединенного с генератором 2 или с дополнительно установленным генератором, либо гидромотора или гидроцилиндра, соединенного гидролиниями с дополнительно установленным гидравлическим насосом, механически связанным с двигателем.
Машина может быть оснащена дополнительным электрическим соединителем 16, соединенным с генератором 2 непосредственно или через электронный модуль 6, выполняющий функции защиты и/или регулирования напряжения. В этом случае целесообразна реализация трехфазного генератора с выходным напряжением 220/380 В переменного тока 50 Гц с целью обеспечения возможности питания внешних потребителей (использования машины в качестве передвижной электростанции).
С помощью соединителя 16 и электрического кабеля возможно также подключение машины к внешней трехфазной электрической сети с напряжением 380 В переменного тока 50 Гц. В этом случае электронный модуль 6 обеспечивает возможность работы машины с использованием электрической энергии внешней сети.
Если конструкция генератора 2 позволяет обеспечить его работу в режиме электродвигателя, то, при соответствующем исполнении электронных модулей 6, 9, он может быть приспособлен для запуска двигателя 1 от внешней электрической сети, подключаемой с использованием электрического кабеля и электрического соединителя 16. В дополнение к этому бортовые редукторы могут быть выполнены обратимыми, а электродвигатели с электронными модулями 7, 8 - с возможностью работы в режиме генератора. В этом случае дополнительно обеспечивается возможность запуска двигателя 1 при буксировке машины или при ее движении под уклон.
Для управления движением и рабочим оборудованием 14 машина оснащена органами управления, в том числе, по меньшей мере, одним аппаратом управления движением машины (джойстиком) 17, соединенным с электронным модулем 9, выполняющим функции центрального контроллера машины. Этот контроллер соединен также с панелью приборов 18, обеспечивающей отображение параметров работы машины и формирование аварийных и предупредительных сигналов для машиниста.
Машина может быть дополнительно оснащена накопителем электрической энергии, выполненным в виде аккумулятора и/или суперконденсатора. В этом случае электронные модули обеспечивают передачу электрической энергии от генератора 2, электродвигателей 4, 6 или внешней сети (через электрический кабель и соединитель 16) в этот накопитель энергии, а также последующую передачу этой накопленной энергии в электродвигатели 4, 5 в рабочем режиме машины.
Электродвигатели 4, 5 могут быть асинхронными частотно-управляемыми.
Более предпочтительным является применение вентильных реактивных (индукторных, индукционных) электродвигателей (ВРД, ВИД, ВИРД) - трех или более фазных электродвигателей без магнитов и электромагнитов в роторе и статоре, управляемых электронными ключами. В англоязычной литературе они называются электродвигателями с переменным магнитным сопротивлением или «Switched Reluctance Motor (SRM)».
Перспективно также применение синхронных электродвигателей с постоянными магнитами в роторе, которые на английском языке называются «Permanent Magnet Synchronous Motor (PMSM)». Реже используется название «BrushLess Direct Current motor (BLDC)», что переводится, как «Бесщеточный мотор постоянного тока».
Особенностью предложенной машины с электромеханической трансмиссии является работа генератора и/или электродвигателей (т.е. только генератора, только электродвигателей или одновременно генератора и электродвигателей) при высоких угловых скоростях их роторов, в частности при угловой скорости его ротора, не менее чем в два раза превышающей максимальную угловую скорость вала двигателя 1.
В настоящее время максимальная угловая скорость дизельных двигателей самоходных рабочих машин обычно не превышает 2200 об/мин. Соответственно, в предложенной машине осуществляется работа генератора и/или электродвигателя с максимальной скоростью не менее 5000 об/мин. В обоснованных случаях эта скорость может быть не менее 10000 об/мин (не менее чем в пять раз выше максимальной угловой скорости вала двигателя), в том числе может составлять 20000 об/мин и более, насколько это позволяет конструкция этого генератора и электродвигателя.
На машине высокоскоростными могут быть только электродвигатели. В этом случае генератор 2 напрямую соединяется с двигателем 1, например, через упругую муфту. Скорость ротора генератора 2 может быть повышена путем применения повышающего редуктора 3.
Для получения высокой скорости электродвигателей 4, 5 они выполнены бесколлекторными, управляемыми от электронных модулей 7, 8, а бортовые редукторы 10, 11 выполнены с повышенными передаточными отношениями.
Другим вариантом реализации предложенного технического решение является применение электродвигателя и/или генератора с маховиком, прикрепленным к его валу или ротору или встроенным в ротор.
Самоходная рабочая машина может дополнительно включать в себя различные дополнительные устройства, условно не показанные на чертеже, в том числе насос охлаждающей жидкости и соответствующий радиатор системы охлаждения двигателя 1, генератора 2, электродвигателей 4, 5 и электронных модулей 6, 7, 8, 9, кондиционер, стартер, устройства (фары) рабочего освещения, стеклоочистители и т.д.
Предлагаемая самоходная рабочая машина с электромеханической трансмиссией работает следующим образом.
При вращении выходного вала дизельного двигателя 1 электронный модуль 9 в соответствии с информационными сигналами, поступающими от генератора 2, формирует необходимые сигналы на его обмотку возбуждения и/или на электронные ключи модуля 6.
Электронный модуль 6 выполняет функции выпрямителя и, при необходимости, может содержать силовые диоды. Напряжение постоянного тока с его выхода поступает на электронные модули 7, 8, которые выполняют функции силовых электронных коммутаторов или силовых инверторов - преобразователей постоянного напряжение в переменное регулируемой частоты.
Накопители электрической энергии, если они установлены на машине, через электронный модуль 6 подключены к цепи постоянного тока.
Тяговые электродвигатели 4, 5, получающие электрическую энергию от электронных модулей 7, 8, преобразуют ее в механическую энергию и передают вращающий момент на бортовые редукторы 10, 11, обеспечивая движение машины.
Режимы работы двигателя 1, генератора 2 и электродвигателей 4, 5 устанавливаются электронным модулем 9, связанным с органами управления машиной (аппаратом управления 17) и панелью приборов 18. Этот электронный модуль 9, реализованный на основе микроконтроллера, выполняет функции центрального контроллера (координатора) системы управления машиной.
Во время работы машины скорость ее движения устанавливается электронным модулем 9 в зависимости от положения рукоятки аппарата управления 17. Если мощности двигателя 1 достаточно для поддержания этой скорости при текущем значении тяговой нагрузки машины, то машина движется с заданной скоростью.
При увеличении тяговой нагрузки машины возрастает необходимый крутящий момент электродвигателей 4, 5. Если этот момент не может быть реализован при заданной скорости вращения роторов электродвигателей (скорости движения машины), то электронные модули 7, 8 осуществляют снижение скорости вращения роторов электродвигателей при одновременном повышении крутящего момента.
При уменьшении тягового усилия машины контроллеры 7, 8, 9 автоматически увеличивают скорость вращения роторов электродвигателей 4, 5 и, соответственно, скорость движения машины до величины, заданной машинистом с помощью аппарата управления 17.
Таким образом, электромеханическая трансмиссия обеспечивает автоматическое регулирования тягового усилия и скорости движения машины в широком диапазоне при полном использовании мощности двигателя 1.
При этом вращающиеся роторы генератора 2 и электродвигателей 4, 5 обладают запасом кинетической энергии: Квр=(I×ω2)/2, где I - момент инерции относительно оси вращения, ω - угловая скорость ротора. За счет этой энергии машина обладает определенным сопротивлением к воздействию моментов внешних сил, вызванных отклонением результирующего тягового усилия от оси продольной симметрии машины и вызывающих его поворот.
Для специалистов в данной области техники понятно, что кроме описанной самоходной рабочей машины возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
1. RU 19233 U1, H02M 11/00, 13.12.2000.
2. RU 2179119 C1, B60L 11/08, A01B 67/00, B60K 17/12, 10.02.2002.
3. RU 92844 U1, B62D 25/16, 10.04.2010.
4. RU 2394701 C2, B60L 11/12, B60K 6/00, 10.11.2009.
Способ предотвращения раскачивания груза на гибком подвесе (варианты)
Способ повышения безопасности работы грузоподъемного крана
Способ повышения безопасности (варианты) и система безопасности стрелового грузоподъемного крана (варианты)
Способ защиты грузоподъемного крана от перегрузки и повреждения и устройство для его осуществления
Способ обмена информацией между модулями системы безопасности грузоподъемного крана и устройство для его осуществления
Способ контроля и регистрации работы грузоподъемного крана
Способ повышения безопасности работы грузоподъемного крана (варианты)
Устройство для измерения силы
Электрическая машина с жидкостным охлаждением статора
Электромеханическая трансмиссия самоходной машины с двигателем внутреннего сгорания
Статор электрической машины с жидкостным охлаждением
Силовой транзисторный коммутатор
Тягово-сцепное устройство
Электрическая машина со встроенным преобразователем
Тягово-сцепное устройство гусеничной или колесной машины
Индукторный генератор с совмещенными обмотками возбуждения и статора
Индукторная электрическая машина
Индукторная электрическая машина
Наземный робототехнический комплекс
Устройство управления строительной машиной (варианты)

