Результат интеллектуальной деятельности: ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА) при заходе на посадку по приборам.
Известные способы и устройства измерения угла крена ЛА основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Таким способам измерения и устройствам, их реализующих, присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений и за один час полета она составляет величину единицы градусов [2, 3]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные способы измерения угла крена ЛА и устройства их реализующие основаны на другом физическом принципе, по сравнению с заявляемыми, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Сущность заявляемого поляризационно-модуляционного способа радиолокационного измерения угла крена ЛА заключается в следующем.
В точке с известными координатами располагают поляризационно-анизотропный пассивный радиолокационный отражатель с горизонтальной линейной собственной поляризацией, выполненный в виде трехгранного уголкового отражателя (УО), состоящего из трех плоских взаимоперпендикулярных металлических или металлизированных треугольных граней одинаковых размеров, значительно превышающих длину волны, в раскрыв которого помещена вертикально ориентированная поляризационная решетка из круглых металлических параллельных стержней (проволок) [5, 6].
Известно [5, 6], что сам по себе трехгранный УО является поляризационно-изотропным объектом, т.е. при падении на него плоской линейно поляризованной электромагнитной волны после трехкратного отражения, формируется плоская волна, распространяющаяся в направлении обратном направлению падения, при этом отраженная волна остается также линейно поляризованной с тем же углом ориентации, т.е. оказывается поляризованной параллельно падающей волне. Таким образом, трехгранный УО ведет себя как плоская металлическая пластина при нормальном падении и поэтому он рассматривается как поляризационно-изотропный объект [5, 6], а его матрица рассеяния (MP) в линейном поляризационном базисе имеет единичную диагональную форму [6]:
где λ - модуль собственного числа (значения) MP и имеет бесконечное множество соответствующих ему пар собственных векторов (собственных поляризаций), при которых квадрат модуля λ2 соответствует максимально возможной эффективной поверхности (площади) рассеяния (ЭПР) σm трехгранного УО, т.е. λ2=σm.
Для придания поляризационно-изотропному трехгранному УО с MP (1) поляризационно-анизотропных свойств в раскрыв УО размещается вертикально ориентированная поляризационная решетка из параллельных металлических стержней (или проволок) с шагом решетки А=5 мм и диаметром стержней В=0.64 мм [5, 6]. Параметры поляризационной решетки (диаметр стержней (проволок) В и шаг решетки А) выбираются такими, что составляющая вектора напряженности электрического поля падающей электромагнитной волны с длиной λ=3.2 см, плоскость поляризации которой ортогональна стержням решетки (проволокам) и находится в горизонтальной плоскости, проходит через поляризационную решетку, практически не изменяясь, и после трехкратного отражения от граней трехгранного УО электромагнитная волна распространяется в направлении обратном направлению падения. При этом отраженная электромагнитная волна горизонтально линейно поляризована независимо от угла ориентации плоскости поляризации падающей волны, в то время как составляющая вектора напряженности электрического поля, плоскость поляризации которой параллельна круглым стержням (или проволокам) и находится в вертикальной плоскости, полностью отражается от поляризационной решетки как от плоской металлической пластины [5]. Таким образом, трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной поляризационной решеткой рассматривается как поляризационно-анизотропный объект [5, 6], а его MP в собственном линейном поляризационном базисе [^^^] имеет вид [5, 6]:
где λ1 - модуль собственного числа MP.
Физический смысл вырожденной MP (2) становится понятным, если обратиться к двухвибраторной модели рассеяния стабильной радиолокационной цели [6, 7], а именно: собственное число MP (2) λ1 имеет смысл эффективной длины вибратора, а его квадрат  - эффективной площади рассеяния (ЭПР) σ. При этом собственное число λ2 равно нулю, а ориентация собственного вектора (или собственной поляризации), соответствующего собственному числу λ1 вырожденной MP (2), соответствует геометрической ориентации вибратора. Тогда вырожденная MP (2) в собственном линейном поляризационном базисе
- эффективной площади рассеяния (ЭПР) σ. При этом собственное число λ2 равно нулю, а ориентация собственного вектора (или собственной поляризации), соответствующего собственному числу λ1 вырожденной MP (2), соответствует геометрической ориентации вибратора. Тогда вырожденная MP (2) в собственном линейном поляризационном базисе  поляризационно-анизотропного трехгранного УО может быть представлена в виде [6, 8]
поляризационно-анизотропного трехгранного УО может быть представлена в виде [6, 8]
где  - максимально возможная ЭПР поляризационно-анизотропного трехгранного УО при облучении его линейно горизонтально поляризованной электромагнитной волной.
- максимально возможная ЭПР поляризационно-анизотропного трехгранного УО при облучении его линейно горизонтально поляризованной электромагнитной волной.
Из анализа (3) следует, что в собственном линейном поляризационном базисе вырожденная MP (3) трехгранного УО, в раскрыве которого помещена вертикально ориентированная поляризационная решетка из круглых параллельных металлических стержней, эквивалентна MP ярко выраженному поляризационно-анизотропному радиолокационному объекту, представляющему собой горизонтальный вибратор.
Тогда, облучая с борта ЛА поляризационно-анизотропный УО с MP (3) линейно поляризованный электромагнитной волной, вектор напряженности электрического поля Е которой вращается с частотой Q, отраженная, от граней трехгранного УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны будет всегда поляризована линейно горизонтально и, соответственно, вектор напряженности электрического поля отраженной от УО электромагнитной волны  будет всегда совпадать с горизонтальной плоскостью. При этом интенсивность отраженной и, соответственно принятой на борту ЛА, электромагнитной волны будет изменяться с частотой 2Ω, от некоторого максимума, при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Однако эти условия соблюдаются только в том случае, когда поперечная ось ЛА находится в горизонтальной плоскости, т.е. крен ЛА отсутствует и, соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают по поляризации и их плоскости поляризации совпадают с горизонтальной плоскостью (плоскостью горизонта). В тех случаях, когда крен ЛА отличен от нуля, т.е. поперечная ось ЛА не находится в горизонтальной плоскости, то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны, при которых достигаются максимум или минимум интенсивности отраженной от УО электромагнитной волны и, соответственно, принятой на борту ЛА электромагнитной волны, смещаются и определяются креном ЛА. При этом плоскость поляризации отраженной от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости, а плоскость поляризации принимаемой на борту ЛА электромагнитной волны не совпадает с горизонтальной плоскостью и ее угол ориентации определяется величиной угла крена ЛА, что определяет физическую основу измерений его угла крена.
будет всегда совпадать с горизонтальной плоскостью. При этом интенсивность отраженной и, соответственно принятой на борту ЛА, электромагнитной волны будет изменяться с частотой 2Ω, от некоторого максимума, при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Однако эти условия соблюдаются только в том случае, когда поперечная ось ЛА находится в горизонтальной плоскости, т.е. крен ЛА отсутствует и, соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают по поляризации и их плоскости поляризации совпадают с горизонтальной плоскостью (плоскостью горизонта). В тех случаях, когда крен ЛА отличен от нуля, т.е. поперечная ось ЛА не находится в горизонтальной плоскости, то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны, при которых достигаются максимум или минимум интенсивности отраженной от УО электромагнитной волны и, соответственно, принятой на борту ЛА электромагнитной волны, смещаются и определяются креном ЛА. При этом плоскость поляризации отраженной от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости, а плоскость поляризации принимаемой на борту ЛА электромагнитной волны не совпадает с горизонтальной плоскостью и ее угол ориентации определяется величиной угла крена ЛА, что определяет физическую основу измерений его угла крена.
Таким образом, облучая поляризационно-анизотропный трехгранный УО электромагнитной волной ориентация вектора напряженности электрического поля  которой совпадает с одной из собственных поляризаций УО, позволяет максимизировать или минимизировать уровень отраженной и, соответственно, принятой на борту ЛА, электромагнитной волны.
которой совпадает с одной из собственных поляризаций УО, позволяет максимизировать или минимизировать уровень отраженной и, соответственно, принятой на борту ЛА, электромагнитной волны.
Тогда вращение плоскости поляризации излучаемой электромагнитной волны с частотой Ω приведет к амплитудной модуляции с частотой 2Ω принятой на борту ЛА электромагнитной волны. Очевидно, что выделение из амплитуды принятого сигнала на выходе приемника спектральной составляющей на частоте 2Ω и измерение ее фазы относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны позволит измерить угол крена ЛА.
Установим связь между амплитудой и фазой спектральной составляющей на частоте 2Q и углом крена ЛА.
Для установления этой связи воспользуемся известным [9] формализмом векторов и матриц Джонса.
Тогда сигнал на входе приемника в собственном линейном ортогональном поляризационном базисе, единичные орты
которого совпадают соответственно с поперечной и вертикальной осями ЛА, можно найти, с учетом (3), с помощью преобразований вида:

где  - вектор Джонса исходной горизонтально линейно поляризованной излучаемой электромагнитной волны, совпадающей с горизонтальной плоскостью и поперечной осью ЛА, представленный в собственном линейном поляризационном базисе
- вектор Джонса исходной горизонтально линейно поляризованной излучаемой электромагнитной волны, совпадающей с горизонтальной плоскостью и поперечной осью ЛА, представленный в собственном линейном поляризационном базисе  ,
,
 - оператор вращателя линейной плоскости поляризации излучаемой электромагнитной волны по направлению движения часовой стрелки на угол α=Ωt (Ω - частота вращения, t - время),
- оператор вращателя линейной плоскости поляризации излучаемой электромагнитной волны по направлению движения часовой стрелки на угол α=Ωt (Ω - частота вращения, t - время),
 - прямой оператор поворота на угол крена ЛА ±γ,
- прямой оператор поворота на угол крена ЛА ±γ,
+γ - положительный угол крена, когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
-γ - отрицательный угол крена, когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости,
 - матрица рассеяния поляризационно-анизотропного трехгранного УО с горизонтальной линейной собственной поляризацией,
- матрица рассеяния поляризационно-анизотропного трехгранного УО с горизонтальной линейной собственной поляризацией,
 - обратный оператор поворота на угол крена ЛА
- обратный оператор поворота на угол крена ЛА  ,
,
 - оператор вращателя плоскости поляризации принимаемой на борту ЛА электромагнитной волны на угол -α.
- оператор вращателя плоскости поляризации принимаемой на борту ЛА электромагнитной волны на угол -α.
 - оператор линейного поляризатора (переход с круглого или квадратного волновода на прямоугольный волновод) с горизонтальной линейной собственной поляризацией, совпадающей с поперечной осью ЛА,
- оператор линейного поляризатора (переход с круглого или квадратного волновода на прямоугольный волновод) с горизонтальной линейной собственной поляризацией, совпадающей с поперечной осью ЛА,
С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до поляризационно-анизотропного УО и обратно, его максимально возможную ЭПР σm и чувствительность приемника.
Проделав в (4) необходимые матричные преобразования, получим

Соответственно, амплитуда сигнала на выходе приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор, с учетом α=Ωt, будет равна:

Из анализа (6) видим, что в спектре огибающей выходного сигнала логарифмического приемника присутствует только спектральная составляющая на частоте 2Ω и ее фаза φ2Ω определяется только углом крена γ ЛА независимо от мощности передатчика, расстояния от передатчика до УО и обратно, ЭПР УО, и чувствительности приемника.
Амплитуда этой спектральной составляющей может быть найдена как

Или с учетом (6) и известного соотношения
а также с учетом того, что уровень сигнала при наличии логарифмического приемника обычно измеряют в децибелах, получим, что амплитуда спектральной составляющей максимальна и равна

а ее фаза φ2Ω с учетом (6) связана с углом крена γ ЛА соотношением:

Использование заявляемой совокупности признаков для измерения угла крена γ ЛА в известных решениях автором не обнаружено.
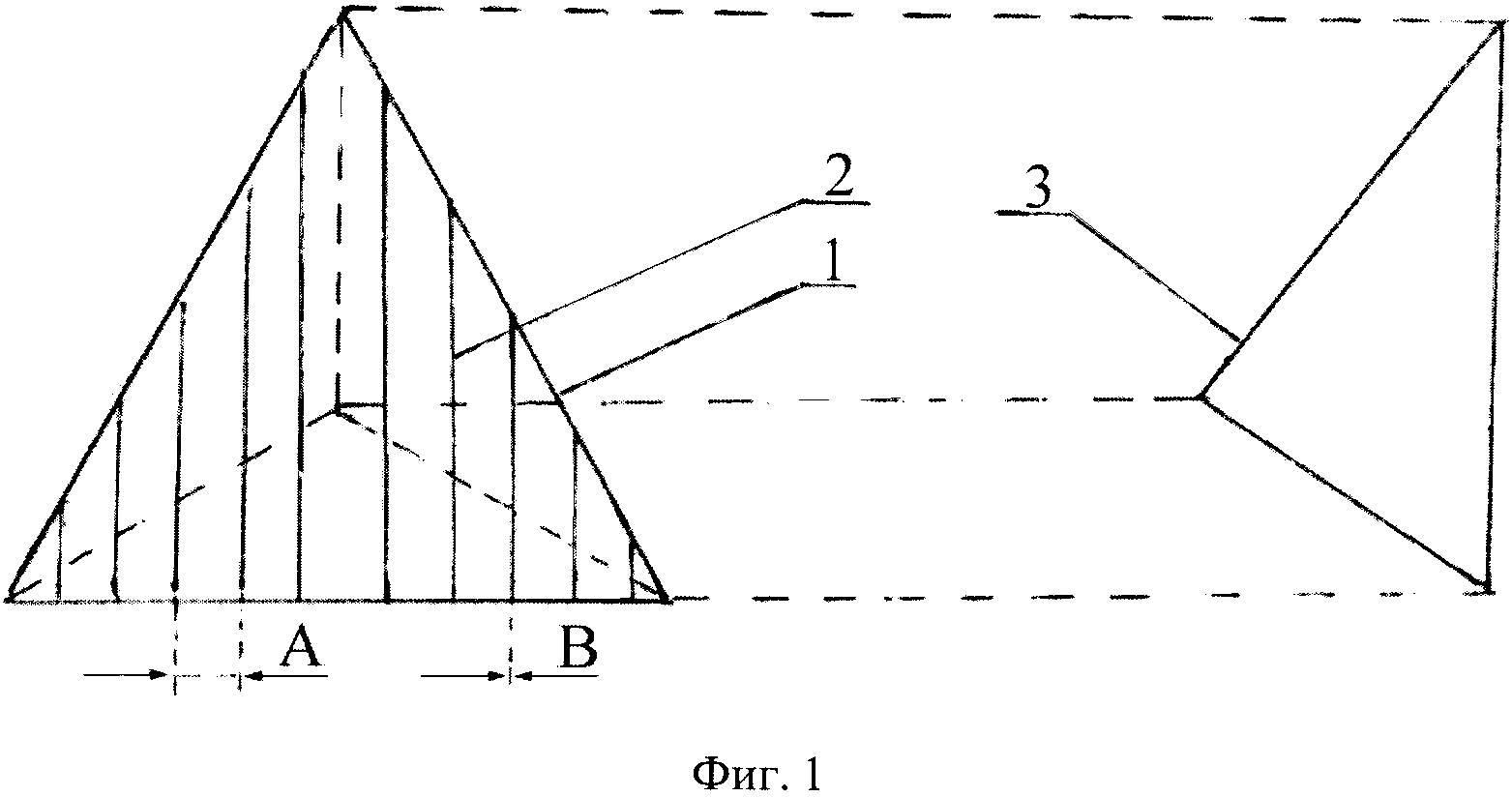
На фиг.1 представлен пассивный поляризационно-анизотропный радиолокационный отражатель электромагнитных волн с горизонтальной линейной собственной поляризацией, расположенный в точке с известными координатами, и выполненный в виде трехгранного УО (позиция 1 вид спереди), в раскрыв которого помещена вертикально ориентированная поляризационная решетка из круглых металлических параллельных стержней (позиция 2) с шагом решетки А=5 мм и диаметром стержней В=0.64 мм. Позиция 3 - вид сбоку.
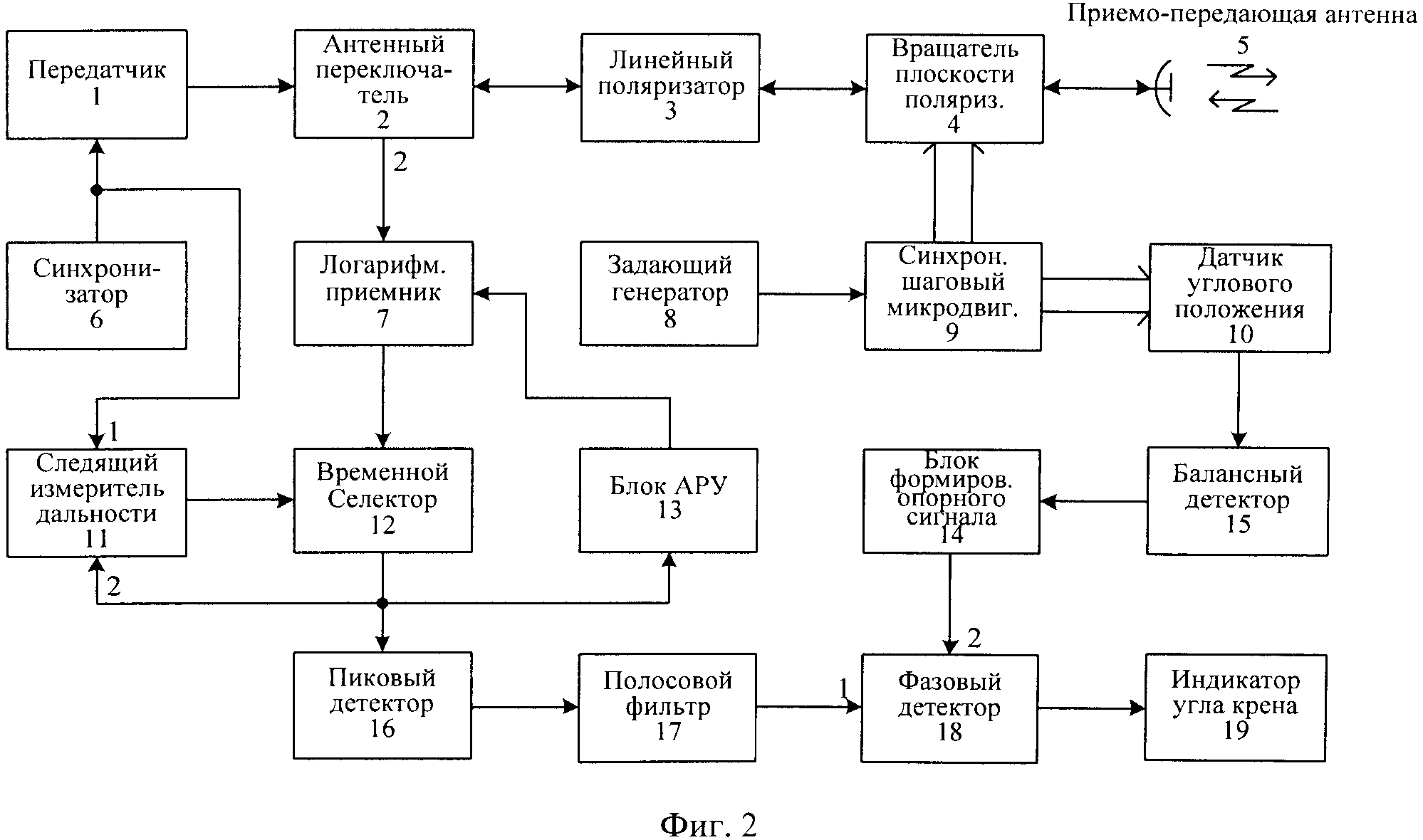
На фиг.2 представлена структурная электрическая схема устройства, реализующего предложенный поляризационно-модуляционный способ радиолокационного измерения угла крена ЛА, расположенного на борту ЛА. Устройство содержит передатчик 1, антенный переключатель 2, линейный поляризатор 3, вращатель плоскости поляризации 4, приемо-передающую антенну 5, синхронизатор 6, логарифмический приемник 7, задающий генератор 8, синхронный шаговый микродвигатель 9, датчик углового положения полуволновой фазовой пластины λ/2 10, следящий измеритель дальности 11, временной селектор 12, блок автоматической регулировки усиления (АРУ) 13, блок формирования опорного сигнала 14, балансный детектор 15, пиковый детектор 16, полосовой фильтр 17, фазовый детектор 18, индикатор угла крена 19.
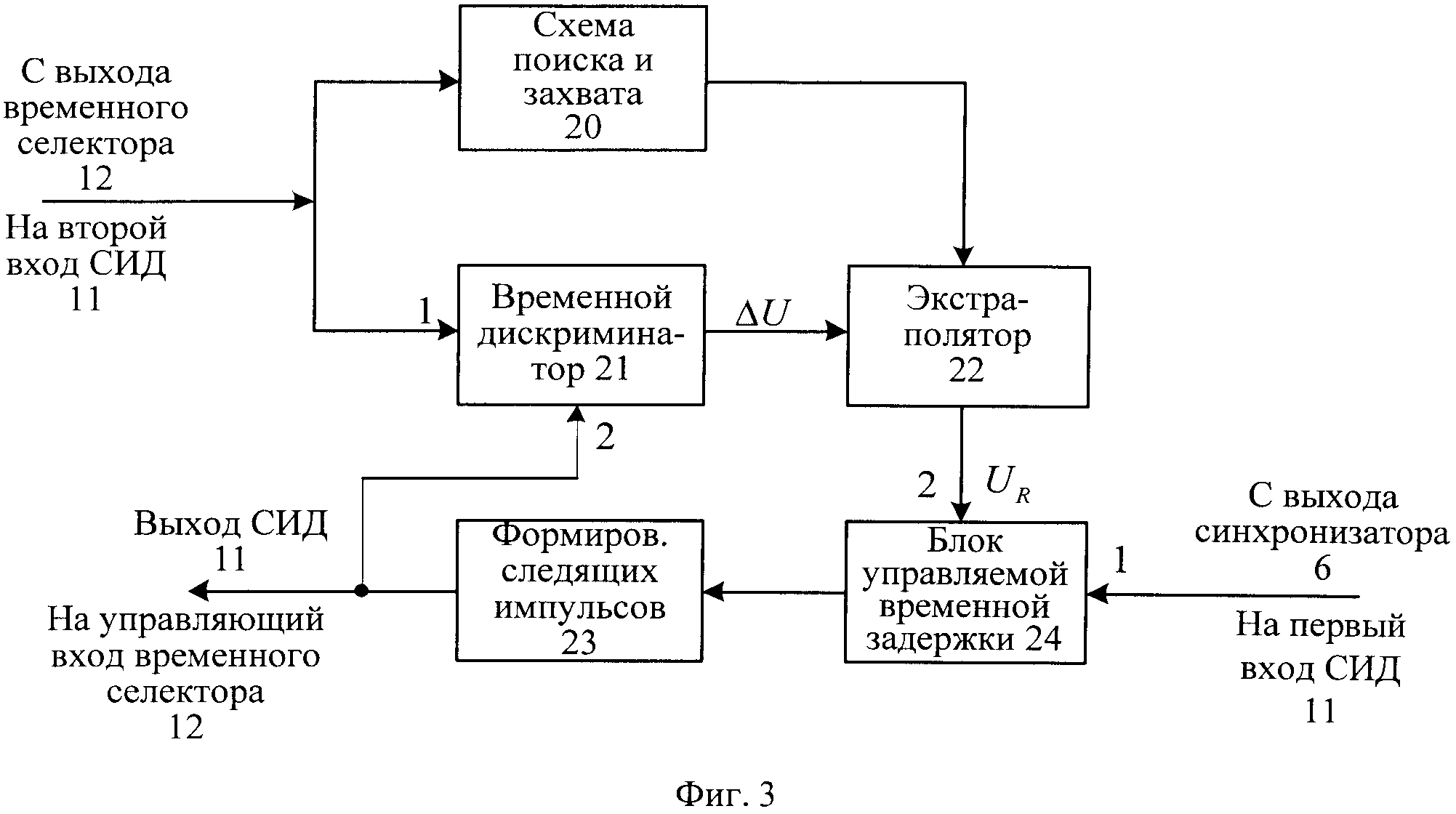
На фиг.3 представлена структурная электрическая схема следящего измерителя дальности (СИД) 11. СИД содержит схему поиска и захвата 20, временной дискриминатор 21, экстраполятор 22, формирователь следящих импульсов 23, блок управляемой временной задержки 24.
Устройство работает следующим образом.
Синхронизатор 6 формирует периодическую последовательность видеоимпульсов запуска передатчика 1 (ИЗП). Передатчик 1 в момент поступления на его вход ИЗП с выхода синхронизатора 6 генерирует радиоимпульс, который через антенный переключатель (АП) 2, линейный поляризатор 3 с горизонтальной линейной собственной поляризацией, совпадающей с поперечной осью ЛА, выполненный в виде перехода с волновода прямоугольного сечения на круглый волновод и вращатель плоскости поляризации 4, поступает в антенну 5 и излучается в направлении поляризационно-анизотропного пассивного радиолокационного отражателя.
Вращатель плоскости поляризации 4 осуществляет вращение с частотой Ω плоскости поляризации излучаемых радиоимпульсов, причем частота вращения Ω много меньше величины 2πFn, где Fn - частота повторения радиоимпульсов, что необходимо для согласования поляризаций излучаемых и принимаемых сигналов. Вращение плоскости поляризации излучаемого сигнала в вращателе 4 осуществляется за счет механического вращения с частотой Ω1=Ω/2 секции круглого волновода с вмонтированной в нее полуволновой λ/2 фазовой пластиной. Частота механического вращения Ω1 полуволновой фазовой пластины выбирается с учетом того, что плоскость поляризации электромагнитной волны, излучаемой антенной 5 в направлении радиолокационного отражателя, будет, как известно [6, 7], поворачиваться на удвоенный угол ориентации полуволновой фазовой пластины. Поэтому непрерывное механическое вращение с частотой Ω1 полуволновой фазовой пластины приведет к тому, что плоскость поляризации излучаемой линейно поляризованной электромагнитной волны будет вращаться непрерывно с частотой Ω=2Ω1. Вращение вращающейся секции круглого волновода обеспечивается синхронным шаговым микродвигателем 9, механически связанным с помощью шестерной зубчатой передачи 1:1 с секцией круглого волновода. Частота вращения секции круглого волновода Ω1 задается задающим генератором 8, который генерирует непрерывную последовательность импульсов, преобразующихся в поворот вала ротора синхронного шагового микродвигателя 9 на некоторый угол. Поскольку вал ротора синхронного шагового микродвигателя механически связан с вращающейся секцией круглого волновода с вмонтированной в нее полуволновой фазовой пластиной, а последовательность импульсов, генерируемых задающим генератором 8, поступает на управляющий вход синхронного шагового микродвигателя 9 непрерывно, то происходит непрерывное вращение полуволновой фазовой пластины с частотой Ω1. Для получения информации об угловом положении полуволновой фазовой пластины вал ротора синхронного шагового микродвигателя 9 одновременно механически связан с датчиком углового положения фазовой пластины 10, выполненным на основе сельсина, ось которого механически связана с помощью зубчатой передачи с шаговым микродвигателем 9. Выходное напряжение сельсина детектируется в балансном детекторе 15, после чего в блоке формирования опорного сигнала 14, формируется на его выходе опорное синусоидальное напряжение с удвоенной частотой вращения плоскости поляризации 2Ω.
Отраженные поляризационно-анизотропным радиолокационным отражателем электромагнитные волны, плоскость поляризации которых всегда совпадает с горизонтальной плоскостью, принимаются антенной 5 и, пройдя вращающуюся секцию круглого волновода с вмонтированной внутрь полуволновой фазовой пластиной 4, поступают на линейный поляризатор 3, где происходит выделение горизонтально линейно поляризованной составляющей, которая через антенный переключатель 2 поступает на вход логарифмического приемника 7 с линейным детектором. В приемнике 7 сигнал усиливается до необходимого уровня и после детектирования подается на сигнальный вход временного селектора 12. Вращение плоскости поляризации излучаемых и, соответственно, принимаемых на борту ЛА отраженных от поляризационно-анизотропного радиолокационного отражателя электромагнитных волн с частотой Ω, приводит к тому, что на выходе логарифмического приемника формируется сигнал, имеющий вид (6), модулированный по амплитуде удвоенной частотой вращения плоскости поляризации 2Ω.
Одновременно выходные ИЗП с выхода синхронизатора 6 поступают на первый вход следящего измерителя дальности 11, а на его второй вход с выхода временного селектора 12 поступают отраженные импульсы от поляризационно-анизотропного радиолокационного отражателя. Следящий измеритель дальности 11 (СИД) предназначен для автоматического отслеживания задержки τ=2R/c, пропорциональной текущей дальности R(t) до радиолокационного отражателя и формирования на его выходе следящих импульсов (СИ), временное положение которых отображает плавное изменение дальности до радиолокационного отражателя. СИ поступают на управляющий вход временного селектора 12, выполненного в виде управляемого ключа, который открывается следящим импульсом СИД только для сигнала отслеживаемого радиолокационного отражателя, который нормируется с помощью АРУ 13. Обобщенная структурная электрическая схема СИД представлена на фиг.3 и выполнена по известной классической схеме [10-12], широко используемой в РЛС сопровождения целей по дальности [13].
Работа СИД 11 заключается в следующем.
Отраженные импульсы (ОИ) с выхода временного селектора 12 поступают на первый вход временного дискриминатора 21, а на его второй вход поступают следящие импульсы (СИ) с выхода формирователя следящих импульсов 23. В временном дискриминаторе 21 происходит сравнение временного положения ОИ и СИ. После чего временной дискриминатор 21 выдает на вход экстраполятора 22 сигнал рассогласования ΔU в аналоговом виде. Для исключения зависимости сигнала рассогласования ΔU от интенсивности ОИ производится нормировка с помощью схемы АРУ 13 по сигналу отслеживаемого радиолокационного отражателя, для чего временной селектор дальности 12 стробируется следящим импульсом. Под воздействием сигнала рассогласования ΔU экстраполятор 22 вырабатывает управляющее напряжение UR, поступающее на управляющий вход 2 блока управляемой временной задержки 24, а на его первый вход поступают ИЗП с выхода синхронизатора 6. Под воздействием управляющего напряжения UR изменяется временная задержка ИЗП. Величина временной задержки ИЗП определяется величиной управляющего напряжения UR с выхода экстраполятора 22. Задержанные импульсы воздействуют на формирователь следящих импульсов 23, который вырабатывает на своем выходе следящие импульсы. Временная задержка следящих импульсов может рассматриваться как ожидаемое запаздывание отраженного радиолокационным отражателем сигнала или, иначе, как экстраполированная оценка на текущий период работы дальномера, полученная по результатам измерений предыдущих циклов. С выхода формирователя следящих импульсов 23 следящие импульсы одновременно подаются на временной дискриминатор 21 и на управляющий вход временного селектора 12, в результате чего временное рассогласование между ОИ и СИ компенсируется и, таким образом, кольцо контура системы слежения за дальностью замыкается.
Режиму слежения или измерения предшествует режим поиска и захвата. Начальное совмещение следящих импульсов с отраженными от радиолокационного отражателя импульсами производится с помощью схемы поиска и захвата 20. В режиме поиска кольцо слежения разорвано, так как временное положение ОИ неизвестно и рассогласование между ОИ и СИ настолько велико, что они не перекрываются. В этом случае схема поиска и захвата 20 воздействует на экстраполятор 22, периодически изменяя линейно по пилообразному закону управляющее напряжение UR на выходе экстраполятора 22 и тем самым медленно смещая по времени следящие импульсы в пределах диапазона измеряемых дальностей. Это перемещение осуществляется периодически с периодом Тп повторения зондирующих импульсов в интервале априорных задержек. Как только в процессе медленной перестройки по дальности следящие импульсы совместятся с отраженными от радиолокационного отражателя импульсами, срабатывает автомат захвата, переключающий СИД из режима поиска в режим сопровождения радиолокационного отражателя по дальности. При этом схема поиска отключается от экстраполятора 22 и управляющее напряжение UR на его выходе пропорционально дальности до радиолокационного отражателя. Таким образом временной селектор по дальности 12, выполненный в виде ключа, открывается следящим импульсом дальности только для отраженных импульсов от отслеживаемого радиолокационного отражателя, которые затем нормируются в приемнике 7 с помощью АРУ 13.
С выхода временного селектора 12 отраженные от радиолокационного отражателя импульсы поступают на вход пикового детектора 16, где осуществляется выделение и запоминание уровня принятого сигнала на время, равное периоду следования излучаемых импульсов. С выхода пикового детектора 16 сигнал поступает на вход полосового фильтра 17, настроенного в соответствии с выражением (6) на удвоенную частоту вращения плоскости поляризации 2Ω. Полосовой фильтр 17 выделяет спектральную составляющую на частоте 2Ω и этот сигнал поступает на первый сигнальный вход фазового детектора 18, а на его второй вход с выхода блока формирования опорного сигнала 14 поступает опорный сигнал с удвоенной частотой вращения плоскости поляризации 2Ω. В фазовом детекторе 18 измеряется фаза φ2Ω спектральной составляющей на частоте 2Ω, по которой определяется угол крена γ ЛА. С выхода фазового детектора 18 сигнал, пропорциональный синусу разности фаз входных сигналов, поступает на индикатор 19, шкала которого проградуирована с учетом соотношения (10) в градусах угла крена γ ЛА.
В 3-см диапазоне длин волн заявляемое устройство измерения угла крена ЛА может быть реализовано следующим образом.
Основные функциональные элементы устройства измерения, включающие в себя: передатчик 1, антенный переключатель 2, приемо-передающая антенна 5, синхронизатор 6, логарифмический приемник 7, временной селектор 12, блок автоматической регулировки усиления (АРУ) 13, балансный детектор 15, пиковый детектор 16, полосовой фильтр 17, фазовый детектор 18 могут быть выполнены с помощью известных технических решений, широко используемых в бортовых радиолокационных системах (РЛС) обзора земной поверхности, применяемых на летательных аппаратах [14].
Линейный поляризатор 3 выполнен в виде перехода с волновода прямоугольного сечения с горизонтальной линейной собственной поляризацией на волновод с круглым сечением [6, 7].
Вращатель плоскости поляризации 4 выполнен в виде вращающейся секции круглого волновода с вмонтированной внутрь полуволновой λ/2 фазовой пластиной [7], механически связанной с помощью шестерной передачи 1:1 с синхронным шаговым микродвигателем 9 типа ДШ-0,025А.
Датчик углового положения 10 может быть выполнен в виде сельсина [14], ось которого с помощью шестерной передачи связана с валом ротора синхронного шагового микродвигателя 9.
Следящий измеритель дальности 11 может быть выполнен с помощью известных технических решений, широко используемых в радиолокационных системах (РЛС) автоматического сопровождения целей по дальности [10-13].
Блок формирования опорного сигнала с удвоенной частотой вращения плоскости поляризации 2Ω 14 может быть выполнен по известной схеме [6, 7].
Индикатор 19 может быть выполнен в виде стрелочного прибора, шкала которого прокалибрована в градусах угла крена ЛА.
По сравнению с широко используемыми средствами измерения угла крена ЛА, основанными на использовании гироскопических систем ориентации, заявляемые поляризационно-модуляционный способ радиолокационного измерения угла крена ЛА и устройство для его реализации позволяют избежать постоянного накапливания с течением времени ошибки измерения. Кроме того, использование радиолокационных отражателей с ярко выраженными поляризационно-анизотропными свойствами в качестве пассивных маркерных радиолокационных маяков при заходе на посадку ЛА на необорудованные полосы позволит снизить затраты на их обслуживание, так как пассивные маяки не требуют электропитания и регламентного обслуживания аппаратуры.
Источники информации
1. Александров А.С., Арно Г.Р. и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. - 119 с.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы. - М., Высшая школа, 1977. - 216 с.
3. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: Транспорт, 1980. - 357 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
5. Кобак В.О. Радиолокационные отражатели. - М.: Сов.радио, 1975. - 248 с.
6. Канарейкин Д.Б., Потехин В.А., Шишкин Н.Ф. Морская поляриметрия. - Л.: Судостроение, 1963. - 328 с.
7. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: Советское радио, 1966. - 440 с.
8. Бадулин Н.Н., Гулько В.Л., Масалов Е.В. Внешняя калибровка радиолокационных поляриметров с помощью пассивных отражателей. - Изв. Вузов MB и ССО СССР Радиоэлектроника, Том 29, №11, 1986. - с.81-82.
9. Аззам Р., Башара П. Эллипсометрия и поляризованный свет. - М.: Мир, 1981. - 588 с.
10. Дулевич В.Е. Теоретические основы радиолокации. - М.: Сов. радио, 1978. - 608 с.
11. Казаринов Ю.М. Радиотехнические системы. - М.: Сов. радио, 1968. - 406 с.
12. Пестряков В.Б., Кузенков В.Д. Радиотехнические системы. - М.: Радио и связь, 1985. - 376 с.
13. Сколник М. Справочник по радиолокации. - М.: Сов. радио, 1978, Т.4. - 376 с.
14. Давыдов П.С. Радиолокационные системы воздушных судов. - М.: Транспорт, 1988. - 359 с.

Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ приготовления бетонной смеси
Способ измерения угла крена подвижного объекта и устройство для его реализации
Способ контроля и ремонта изоляции проводов
Радионавигационная система для измерения пеленга подвижного объекта
Радионавигационная система для измерения пеленга подвижного объекта
Способ изготовления трубчатого соединения алюмооксидной керамики с металлом
Способ спекания изделий диэлектрической керамики
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ измерения угла крена летательного аппарата и устройство для его реализации
Способ приготовления бетонной смеси
Способ измерения угла крена подвижного объекта и устройство для его реализации
Способ контроля и ремонта изоляции проводов
Радионавигационная система для измерения пеленга подвижного объекта
Радионавигационная система для измерения пеленга подвижного объекта
Способ изготовления трубчатого соединения алюмооксидной керамики с металлом
Способ спекания изделий диэлектрической керамики
Способ измерения угла крена летательного аппарата и устройство для его реализации

