Результат интеллектуальной деятельности: СИСТЕМА ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА
Вид РИД
Изобретение
Изобретение относится к области судовождения - автоматическому управлению движением судна, в частности к идентификации гидродинамических коэффициентов математической модели движения судна.
Известны системы определения параметров математической модели движения судна, которые основаны на использования заданной структуры математической модели движения судна, вида:
где Vx, Vy, ωz, φ - продольная, боковая и угловая скорости судна, угол курса, δ - угол перекладки руля,
aij - неизвестные параметры математической модели движения судна (подлежащие уточнению гидродинамические коэффициенты: a11, a12, a13, a21, a22, a23),
ς1, ς2, ς3 - входные помехи с нулевыми средними и известными ковариационными матрицами M[ςi(t)]=0 и 
[П.В Попов Идентификация уравнений динамики подвижного аппарата по натурным данным ходовых испытаний ОАО «Концерн НПО «Аврора» С.Петербург // Сборник трудов ХХХУ111 Всероссийской конференции издательство ИПУ РАН 2012, г. Москва]
Известна система экспериментального определения влияния вариации коэффициента математической модели объекта на его динамику (SU 205913 А1, 01.02.1967). Выходной сигнал с исследуемого объекта запоминают (задерживают), формируют невязку, а затем пропускают через электронную модель исследуемого объекта, в котором варьируют величину коэффициента (постоянной времени) модели. Недостатком такой системы является идентификация только одного параметра идентифицируемой системы.
Известна система экспериментального определения параметров математической модели движения судна (RU 2151713 C1, 27.06.2000, принятый нами в качестве прототипа). Известная система использует только часть измеряемых фазовых координат состояния судна. Используя измеренные параметры и сформированные с использованием электронной модели движения судна, получают невязки, которые минимизируют путем вариации искомых величин гидродинамических коэффициентов в электронной модели.
Недостатки:
1) использование только части измеряемых фазовых координат состояния судна,
2) низкая точность идентификации гидродинамических коэффициентов математической модели движения судна,
3) высокие требования к виду задаваемых специальных режимов плавания для идентификации параметров гидродинамических коэффициентов математической модели.
Техническим результатом предлагаемой системы определения гидродинамических коэффициентов математической модели движения судна является:
- создание высокоточной математической модели движения судна, параметры которой уточняются в процессе рейса судна,
- повышение качества автоматического управления движением,
- повышение безопасности проводки судна в узкостях,
- снижение загрузки рулевого привода при сильном волнении.
Поставленные цели достигаются с помощью:
- введения подсистемы формирования коэффициентов усиления в процессе идентификации гидродинамических коэффициентов (введением блоков 10. и 11.);
- использования полного набора измерителей фазового состояния судна (включая измерители линейных dVy/dt и угловых dωz/dt ускорений);
- проведения идентификации при облегченных идентификационных режимах движения судна,
- определения значений гидродинамических коэффициентов путем решения двух независимых систем алгебраических уравнений.
Предлагаемая система идентификации позволяет в процессе рейса судна (практически не нарушая заданный режим движения) уточнять гидродинамические коэффициенты математической модели движения судна.
Математическая модель принята вида:

где Vx, Vy, ωz - продольная, боковая и угловая скорости движения судна,
dVy/dt - боковое (линейное) ускорение судна,
dωz/dt - угловое ускорение судна,
δ - кормовой руль,
aij - неизвестные, подлежащие уточнению (шесть оценок) гидродинамические коэффициенты: a11, a12, a13, a21, a22, a23 путем решения систем алгебраических уравнений.
Технический результат достигается тем, что система идентификации гидродинамических коэффициентов математической модели движения судна содержит задатчик идентификационных маневров управления движением судна; блок измерения, включающий датчики бокового ускорения - dVyi/dt, боковой скорости судна - Vyi, продольной скорости - Vxi, угловой скорости - ωzi, угла перекладки руля - δi, углового ускорения - dωzi/dt в момент времени i, в блоке формируются также сигналы:  .,
.,
dVyi/dt, dωzi/dt; блок формирования правой части уравнения математической модели боковой скорости:

блок формирования правой части уравнения математической модели угловой скорости:

блок формирования невязок канала боковой скорости:


блок формирования невязок канала угловой скорости:

блок формирования коррекции оценок гидродинамических коэффициентов в канале боковой скорости:

блок формирования коррекции оценок гидродинамических коэффициентов в канале угловой скорости:

блок памяти, содержащий оценки гидродинамических коэффициентов судна a11,i, a12,i, a13,i, a21,i, a22,i, a23,i и элементы ковариационной матрицы: P11,i, P12,i, P13,i, P22,i, P23,i, P33,i;
блок сравнения, формирующий модули разностей гидродинамических коэффициентов судна, используя сигналы из блока памяти: a11,i, a12,i, a13,i, a21,i, a22,i, a23,i и из блоков формирования коррекции гидродинамических коэффициентов каналов боковой и угловой скоростей: a11,i+1, a12,i+1, a13,i+1, a21,i+1, a22,i+1, a23,i+1. В блоке сравнения производится сравнение модулей разности с заданными допустимыми значениями - εij:

Для решения поставленных задач вводят блок формирования коэффициентов усиления в процессе идентификации гидродинамических коэффициентов судна:

и блок формирования коррекции элементов ковариационной матрицы:

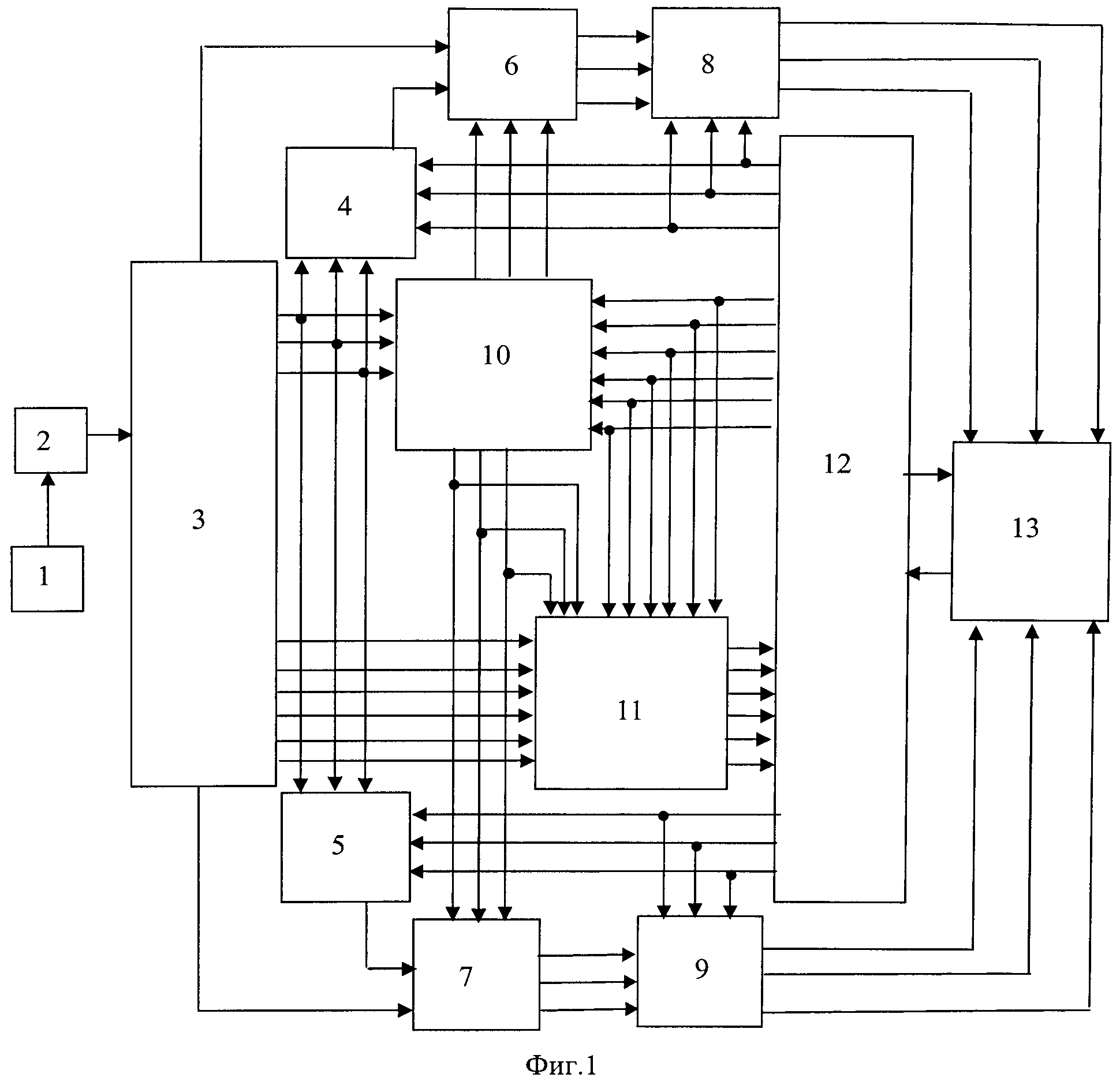
Обеспечить правильное функционирование всех рассмотренных выше блоков возможно, если выполнить все связи между ними в соответствии с фиг.1.
Если все шесть модулей разности, сформированные в блоке сравнения:

меньше допустимых значений εij, то полученные оценки гидродинамических коэффициентов, в блоке формирования коррекции оценок гидродинамических коэффициентов в канале боковой скорости - Vy и блоке формирования коррекции оценок гидродинамических коэффициентов в канале угловой скорости - ωz близки к истинным значениям искомых параметров математической модели движения судна в данный момент времени плавания, если же хотя бы одно из шести условий, полученных в блоке сравнения, не удовлетворяется, то шесть элементов ковариационной матрицы P11,i+1, P12,i+1, P13,i+1, P22,i+1, P23,i+1, P33,i+1 из блока формирования коррекции элементов ковариационной матрицы вводят в блок памяти взамен шести элементов ковариационной матрицы P11,i, P12,i, P13,i, P22,i, P23,i, P33,i.. Три оценки гидродинамических коэффициентов a11,i+1, a12,i+1, a13,i+1 из блока формирования коррекции оценок гидродинамических коэффициентов в канале боковой скорости - Vy и три оценки гидродинамических коэффициентов a21,i+1, a22,i+1, a23,i+1 из блока формирования коррекции оценок гидродинамических коэффициентов в канале угловой скорости - ωz вводят в блок памяти взамен a11,i, a12,i, a13,i, a21,i, a22,i, a23,i.
При поступлении новых измерений через интервал времени Δt рассмотренный выше процесс уточнения гидродинамических коэффициентов вновь повторяется. По истечении «n» таких циклов идентификации, когда выполнятся все условия сравнения  полученные значения оценок гидродинамических коэффициентов будут соответствовать искомым, т.е. определение гидродинамических коэффициентов математической модели движения судна успешно заканчивается.
полученные значения оценок гидродинамических коэффициентов будут соответствовать искомым, т.е. определение гидродинамических коэффициентов математической модели движения судна успешно заканчивается.
Построение и работа системы определения параметров математической модели движения судна
Блок-схема системы идентификации приведена на фиг.1 и включает: 1 - задатчик идентификационных маневров управления движением судна; 2 - судно; 3 - измерительный блок (включающий датчики бокового ускорения dVy/dt, боковой скорости хода Vy, продольной скорости Vx; угловой скорости ωz, угла перекладки руля δ и углового ускорения dωz/dt); 4 и 5 - блоки формирования правых частей математической модели боковой скорости судна - Vy и модели угловой скорости судна - ωz; 6 и 7 - блоки формирования невязок каналов боковой и угловой скоростей судна; 8 и 9 - блоки коррекции гидродинамических коэффициентов в каналах боковой и угловой скоростей; 10 - блок формирования коэффициентов усиления в процессе идентификации гидродинамических коэффициентов; 11 - блок коррекции элементов ковариационной матрицы; 12 - блок памяти; 13 - блок сравнения.
Рассматриваемая система может быть реализована как с применением аналоговых счетно-решающих элементов, так и цифровых (последние предпочтительней). Измерительный блок следует оснастить датчиками с точностью не ниже 2%.
Рассмотрим процесс формирования уравнений для определения (корректировки) гидродинамических коэффициентов математической модели движения судна.
Процесс вычисления оценок гидродинамических коэффициентов начинается с задания:
- начальных значений гидродинамических коэффициентов (в блоке памяти 12):
a11,i=0., a12,i=0., a13,i=0., a21,i=0., a22,i=0., a23,i=0,
- начальных значений элементов ковариационной матрицы
P11,i=P22,i=P33,i=104, P12,i=P13,i=P23,i=0 (в блоке-памяти 12),
- идентификационных маневров судна, которые формируются в задатчике идентификационных маневров движения судна 1.
Формирование двух каналов получения оценок гидродинамических коэффициентов: а) a11,i, a12,i, a13,i и б) a21,i, a22,i, a23,i.
а. Сигналы  с блока измерения 3 поступают на первый вход блока формирования правой части математической модели боковой скорости судна Vy 4, на второй вход которого поступают из блока памяти 12 гидродинамические коэффициенты a11,i, a12,i, a13,i. В блоке 4 формируется сигнал, описывающий правую часть уравнения боковой скорости Vy:
с блока измерения 3 поступают на первый вход блока формирования правой части математической модели боковой скорости судна Vy 4, на второй вход которого поступают из блока памяти 12 гидродинамические коэффициенты a11,i, a12,i, a13,i. В блоке 4 формируется сигнал, описывающий правую часть уравнения боковой скорости Vy: 
С блока измерения 3 сигналы  поступают на первый вход блока 10, на второй вход которого из блока памяти 12 поступают элементы ковариационной матрицы P11,i, P12,i, P13,i, P22,i, P23,i, P33,i. В блоке 10 формируются коэффициенты усиления процесса идентификации гидродинамических коэффициентов K1i, K2i, K3i.
поступают на первый вход блока 10, на второй вход которого из блока памяти 12 поступают элементы ковариационной матрицы P11,i, P12,i, P13,i, P22,i, P23,i, P33,i. В блоке 10 формируются коэффициенты усиления процесса идентификации гидродинамических коэффициентов K1i, K2i, K3i.
С выходов блоков 3, 4 и 10 сигналы: dVyi/dt,  и K1i, K2i, K3i поступают на вход блока невязок канала боковой скорости - Vy 6, где формируют невязки:
и K1i, K2i, K3i поступают на вход блока невязок канала боковой скорости - Vy 6, где формируют невязки:

Невязки, сформированные по зависимости (2) из блока 6, поступают на первый вход блока коррекции гидродинамических коэффициентов 8, на второй вход которого поступают гидродинамические коэффициенты a11,i, a12,i, a13,i из блока памяти 12. В блоке 8 формируют обновленные гидродинамические коэффициенты:

Гидродинамические коэффициенты, сформированные по зависимости (3) в блоке 8, вводятся в блок сравнения 13.
б. Сигналы  снимаемые с блока измерения 3, поступают на первый вход блока формирования правых частей математической модели углового движения - ωz 5, на второй вход которого поступают из блока памяти 12 гидродинамические коэффициенты a21,i, a22,i, a23,i. На выходе блока 5 формируется сигнал, описывающий правую часть уравнения углового движения - ωz:
снимаемые с блока измерения 3, поступают на первый вход блока формирования правых частей математической модели углового движения - ωz 5, на второй вход которого поступают из блока памяти 12 гидродинамические коэффициенты a21,i, a22,i, a23,i. На выходе блока 5 формируется сигнал, описывающий правую часть уравнения углового движения - ωz: 
С выходов блоков 3, 5 и 10 сигналы: dωzi/dt,  и K1i, K2i, K3i поступают на вход блока невязок канала угловой скорости 7, где формируют невязки:
и K1i, K2i, K3i поступают на вход блока невязок канала угловой скорости 7, где формируют невязки:
Невязки с выхода блока 7. поступают на вход блока коррекции гидродинамических коэффициентов 9, на второй вход которого из блока памяти 12 поступают гидродинамические коэффициенты a21,i, a22,i, a23,i.
В блоке 9 формируют обновленные гидродинамические коэффициенты:

Гидродинамические коэффициенты, сформированные по зависимости (4) в блоке 9, вводятся в блок сравнения 13. В блоке сравнения 13 формируются модули разностей обновленных гидродинамических коэффициентов: a11,i+1, a12,i+1, a13,i+1, a21,i+1, a22,i+1, a23,i+1 и гидродинамических коэффициентов: a11,i, a12,i, a13,i, a21,i, a22,i, a23,i (вводят из блока памяти 12):

Если все разности (5) и (5a) не выходят из заданной точностной трубки, то процесс идентификации считается законченным, а полученные коэффициенты: a11,i+1, a12,i+1, a13,i+1, a21,i+1, a22,i+1, a23,i+1 соответствуют истинным значениям гидродинамических коэффициентов математической модели движения в данный момент времени.
Если хотя бы одна из зависимостей (5) или (5a) не удовлетворяется, то в блок памяти 12 вместо (старых) значений гидродинамических коэффициентов: a11,i, a12,i, a13,i, a21,i, a22,i, a23,i заносятся новые: a11,i+1, a12,i+1, a13,i+1, a21,i+1, a22,i+1, a23,i+1 (из блока 13).
С измерительного блока 3 сигналы  поступают на первый вход блока коррекции элементов ковариационной матрицы 11, на второй и третий входы которого поступают коэффициенты усиления невязок процесса идентификации гидродинамических коэффициентов K1i, K2i, K3i из блока 10 и элементы ковариационной матрицы P11,i+1, P12,i+1, P13,i+1, P22,i+1, P23,i+1, P33,i+1 из блока 12. На выходе блока 11 формируют обновленные элементы ковариационной матрицы:
поступают на первый вход блока коррекции элементов ковариационной матрицы 11, на второй и третий входы которого поступают коэффициенты усиления невязок процесса идентификации гидродинамических коэффициентов K1i, K2i, K3i из блока 10 и элементы ковариационной матрицы P11,i+1, P12,i+1, P13,i+1, P22,i+1, P23,i+1, P33,i+1 из блока 12. На выходе блока 11 формируют обновленные элементы ковариационной матрицы:

где  Элементы ковариационных матриц вводят в блок памяти 12.
Элементы ковариационных матриц вводят в блок памяти 12.
Затем через интервал времени Δt весь рассмотренный выше цикл уточнения гидродинамических коэффициентов вновь повторяется. Через «n» циклов идентификации, когда выполнятся все условия (5) и (5а), полученные значения оценок гидродинамических коэффициентов будут соответствовать искомым, таким образом (в данный момент времени) идентификация гидродинамических коэффициентов математической модели движения судна успешно заканчивается.
Результаты моделирования
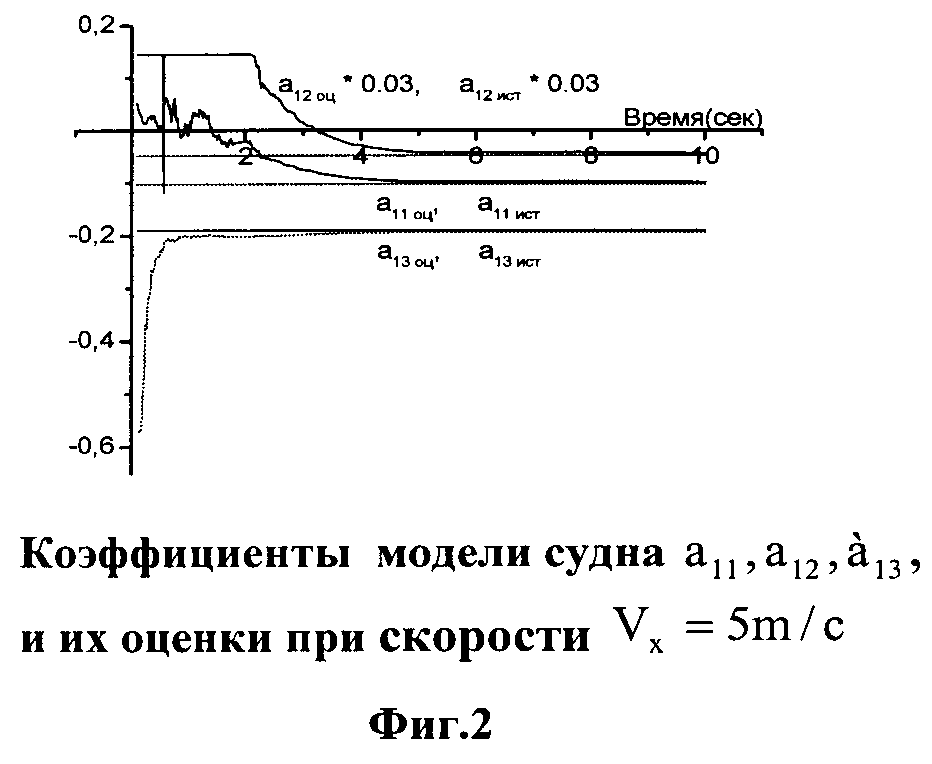
На фиг.2 и 3 представлены оценки и истинные значения гидродинамических коэффициентов математической модели судна «Сиберяков» a11, a12, a13, и, a21, a22, a23 при скорости судна Vx=5 m/c с использованием идентификационного режима «зигзаг».
Из фигур следует, что процесс корректировки оценок гидродинамических коэффициентов занимает около восьми секунд (расхождение восстановленных оценок гидродинамических коэффициентов от истинных значений не более 5%).
Система определения гидродинамических коэффициентов математической модели движения судна, содержащая задатчик идентификационных маневров управления движением судна; объект управления; блок измерения, включающий датчики: бокового ускорения - dV/dt, боковой скорости судна - V, продольной скорости - V, угловой скорости - ω, угла перекладки руля - δ, углового ускорения - dω/dt, в блоке измерения формируются сигналы: VV…,Vω…,V²δ…,V²V²…,V²Vω…,V²ω²…,V³Vδ…,V δ², dV/dt, dω/dt, V, V, ω, δ; блок памяти содержит текущие оценки гидродинамических коэффициентов судна: a, a, a, a, a, a и элементы ковариационной матрицы: P, P, P, P, P, P; блок формирования правой части математической модели боковой скорости: dV/dt = aVV+aVω+aV²δ; блок формирования правой части математической модели угловой скорости: dω/dt = aVV+aVω+aV²δ;блок формирования невязок канала боковой скорости:ν = K (dV/dt - aVV - aVω - aV²δ),ν = K (dV/dt - aVV - aVω - aV²δ),ν = K (dV/dt - aVV - aVω - aV²δ);блок формирования невязок канала угловой скорости:ν = K (dω/dt - aVV - aVω - aV²δ),ν = K (dω/dt - aVV - aVω - aV²δ),ν = K (dω/dt - aVV - aVω - aV²δ);блок формирования коррекции оценок гидродинамических коэффициентов в канале боковой скорости:a= a + K (dV/dt - aVV - aVω - aV²δ),a= a + K (dV/dt - aVV - aVω - aV²δ),a= a + K (dV/dt - aVV - aVω - aV²δ);блок формирования коррекции оценок гидродинамических коэффициентов в канале угловой скорости:a= a + K (dω/dt - aVV - aVω - aV²δ),a= a + K (dω/dt - aVV - aVω - aV²δ),a= a + K (dω/dt - aVV - aVω - aV²δ);блок сравнения - формирует модули разностей гидродинамических коэффициентов судна, которые поступают:- из блока памяти a, a, a, a, a, a;- из блоков формирования коррекции гидродинамических коэффициентов канала боковой скорости: a, a, a;- из блоков формирования коррекции гидродинамических коэффициентов канала угловой скорости: a, a, a;для сравнения с допустимыми значениями - ε:| a- a | ≤ ε, | a- a | ≤ε, | a- a | ≤ε(А)| a- a | ≤ ε, | a- a | ≤ε, | a- a | ≤ε;отличающаяся тем, что содержит блок формирования коэффициентов усиления в процессе идентификации гидродинамических коэффициентов судна:K = PVV+ PVω+ PV²δ,K = PVV+ PVω+ PV²δ,K = PVV+ PVω+ PV²δ;и блок формирования коррекции элементов ковариационной матрицыP= P - K² / r,P= P - K - K / r,P= P - K - K / r,P= P - K² / r,P= P - K - K / r,P= P - K² / r;гдеr=V²V²P+2V²VωP+2V³VδP+V²ω²P+2V³VδP+ +V δ² +1;если все условия (А), формируемые в блоке сравнения, удовлетворяются, то полученные оценки гидродинамических коэффициентов в блоке формирования коррекции оценок гидродинамических коэффициентов в канале боковой скорости - V и блоке формирования коррекции оценок гидродинамических коэффициентов в канале угловой скорости - ω близки к искомым значениям, если же хотя бы одно из шести условий (А), полученных в блоке сравнения, не удовлетворяется, то шесть элементов ковариационной матрицы P, P, P, P, P, Pиз блока формирования коррекции элементов ковариационной матрицы вводят в блок памяти взамен находившихся в блоке памяти шести элементов ковариационной матрицы P, P, P, P, P, P и три оценки гидродинамических коэффициентов a, a, a из блока формирования коррекции оценок гидродинамических коэффициентов в канале боковой скорости - V и три оценки гидродинамических коэффициентов a, a, a из блока формирования коррекции оценок гидродинамических коэффициентов в канале угловой скорости - ω вводят в блок памяти взамен находившихся в блоке памяти: a, a, a и a, a, a;через интервал времени Δt в системе процесс коррекции гидродинамических коэффициентов a, a, a, a, a, a и элементов ковариационной матрицы P, P, P, P, P, P повторяется.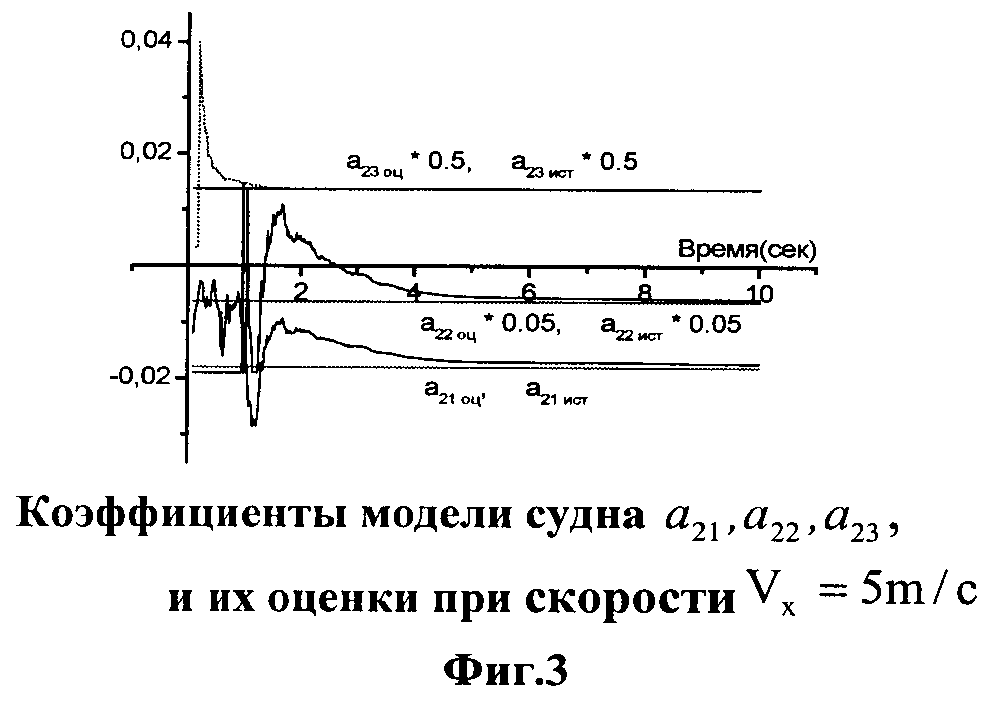
Привязной аэростат
Способ организации системной сети в виде неблокируемого самомаршрутизируемого трехмерного р-ичного мультикольца
Измеритель вектора перемещения транспортного средства
Автоподстроечный способ измерения малого значения уровня вещества
Способ измерения положения границы раздела двух веществ в резервуаре
Устройство для определения содержания воды в потоке нефтепродукта
Устройство для измерения высоких давлений газообразных сред
Способ определения расходной характеристики гидравлического тракта для области перехода от турбулентного к ламинарному режиму истечения
Привязной коптер
Устройство для электропитания привязного летательного аппарата
Установка для исследования рулевых винтов вертолета на режиме неуправляемого вращения

