Результат интеллектуальной деятельности: ОБНАРУЖЕНИЕ КАСАНИЯ НА ИСКРИВЛЕННОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
[0001] Различные устройства ввода позволяют пользователям взаимодействовать с графическими пользовательскими интерфейсами на вычислительных устройствах. Например, дисплеи (с восприятием) множественных касаний используют датчик множественных касаний, расположенный на компьютерном устройстве отображения, позволяют пользователю взаимодействовать с контентом, показанным на графическом пользовательском интерфейсе, с помощью естественных интуитивных жестов. Дисплеи с восприятием множественных касаний могут обнаружить касание с помощью различных механизмов, включая емкостные и основанные на видении механизмы. Однако в некоторых средах использования дисплеи с восприятием множественных касаний могут вносить различные проблемы. Например, вертикально ориентированный дисплей с восприятием множественных касаний, такой как тот, который может использоваться с настольным компьютером, может вызвать усталость у пользователя из-за положения руки, поддерживаемой пользователем.
[0002] Компьютерные мыши также позволяют пользователям взаимодействовать с графическим пользовательским интерфейсом с помощью курсора, показанного на дисплее, который отслеживает движение мыши. Компьютерные мыши могут удобно использоваться в течение длительных промежутков времени. Однако из-за основанной на курсоре парадигмы ввода, используемой основанными на мыши графическими пользовательскими интерфейсами, возможности основанных на естественных движениях взаимодействий с графическим пользовательским интерфейсом являются более ограниченными, чем с основанными на контакте системами ввода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Соответственно, различные варианты осуществления раскрыты в настоящем описании, которые относятся к устройствам ввода с искривленными поверхностями (восприятия) множественных касаний. Например, один раскрытый вариант осуществления содержит чувствительное к касанию устройство ввода, имеющее искривленный геометрический элемент, содержащий датчик касания, упомянутый датчик касания содержит совокупность элементов датчика, интегрированных в искривленный геометрический элемент и сконфигурированных для обнаружения касания, сделанного на поверхности искривленного геометрического элемента.
[0004] Настоящий раздел предоставлен, чтобы ввести выбор понятий в упрощенной форме, которые дополнительно описаны ниже в подробном описании. Этот раздел сущности изобретения не предназначен, чтобы идентифицировать ключевые или существенные признаки заявленного объекта, и при этом он не предназначен, чтобы использоваться для ограничения объема заявленного объекта. Кроме того, заявленный объект не ограничен реализациями, которые решают какие-либо или все недостатки, отмеченные в какой-либо части настоящего описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
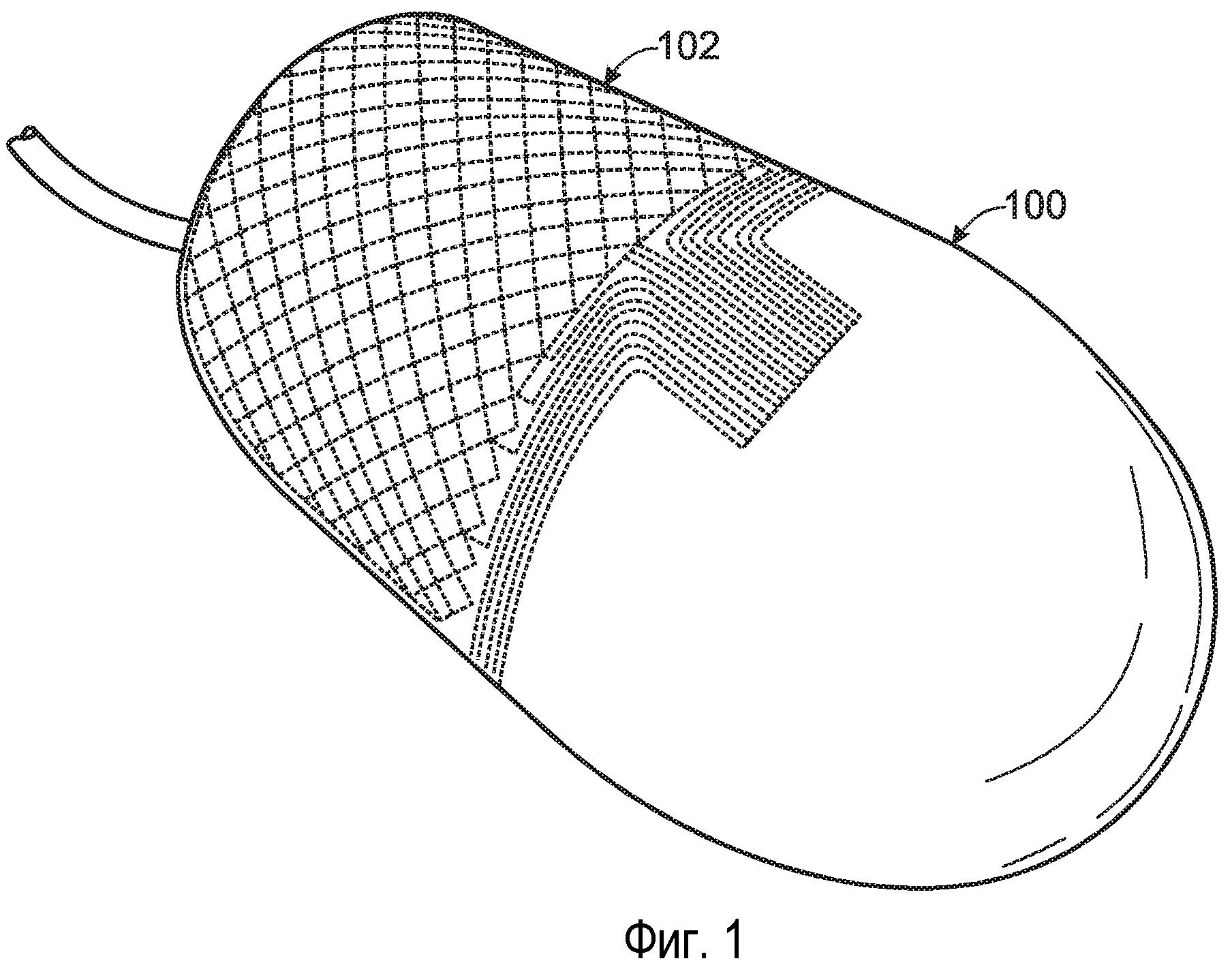
[0005] Фиг.1 показывает вариант осуществления мыши, содержащей датчик касания.
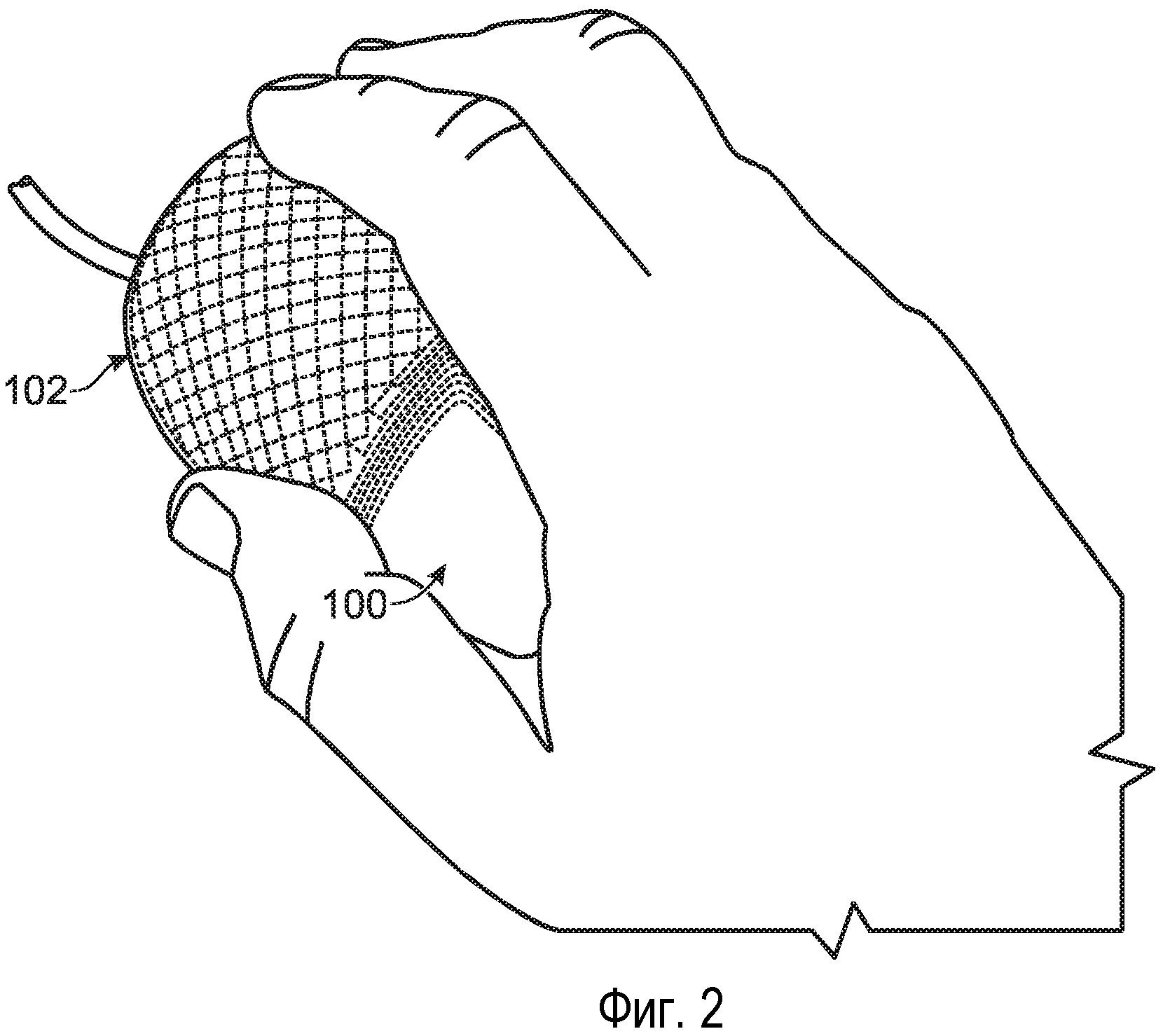
[0006] Фиг.2 изображает пользователя, держащего вариант осуществления согласно Фиг.1.
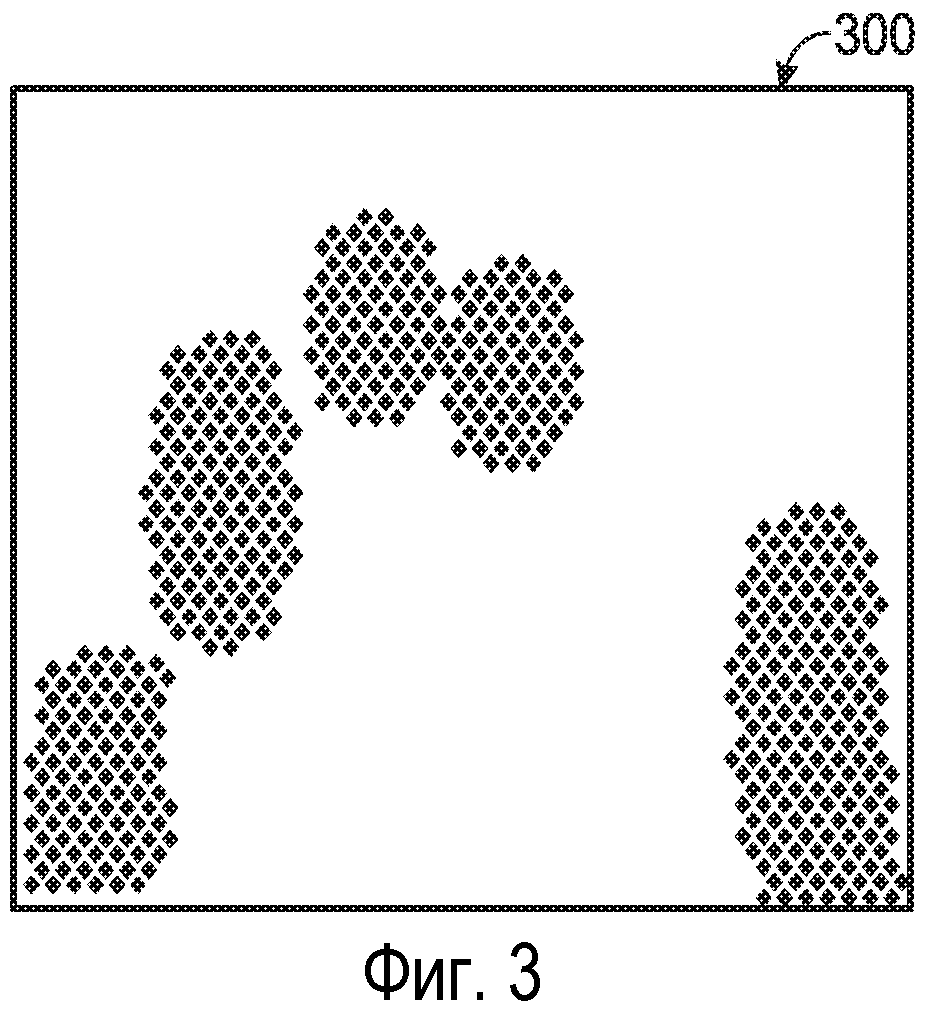
[0007] Фиг.3 изображает схематическое представление сигнала, обнаруженного датчиком касания из варианта осуществления согласно Фиг.1, когда удерживается, как изображено на Фиг.2.
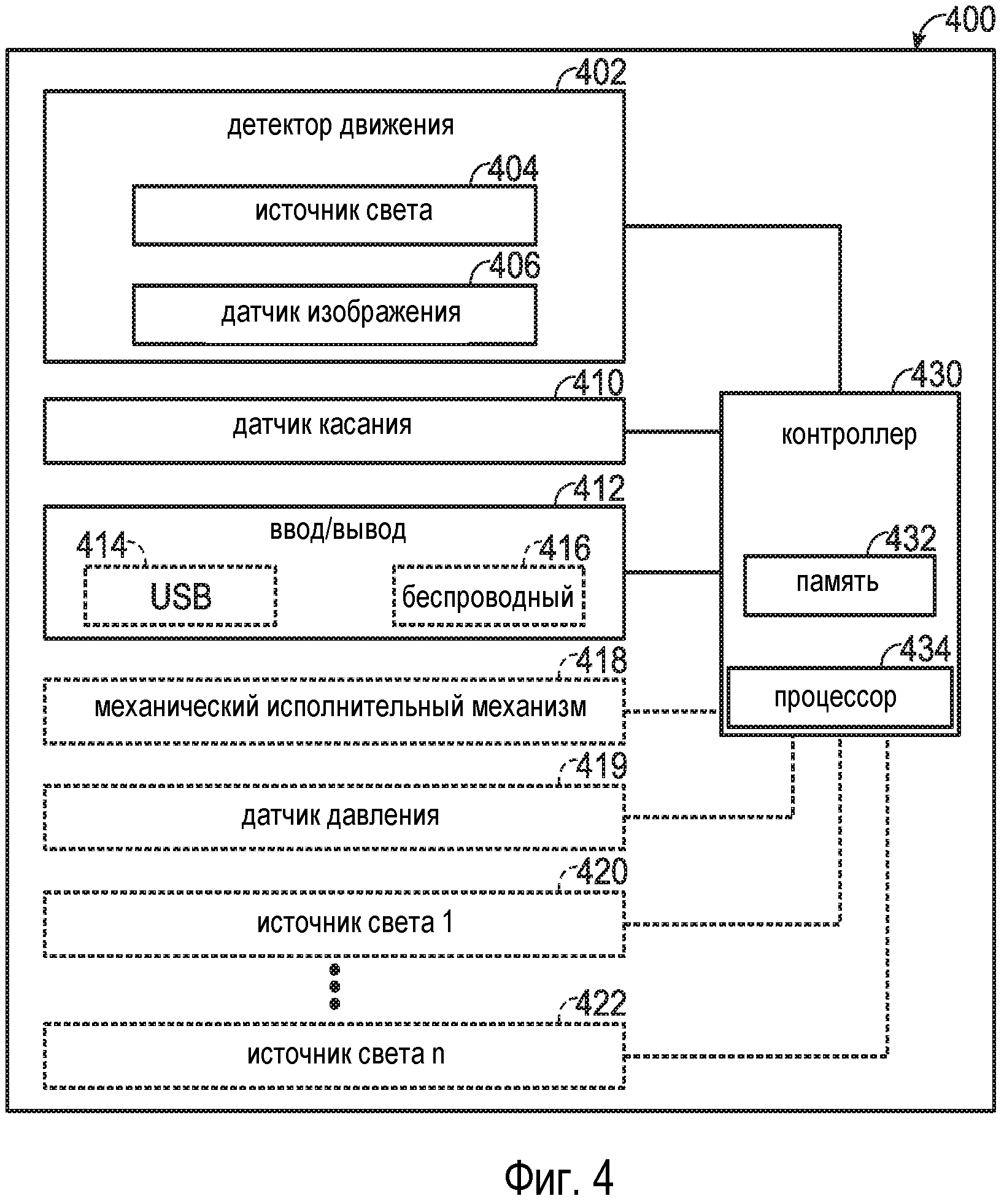
[0008] Фиг.4 показывает блок-схему варианта осуществления мыши, содержащей чувствительную к касанию поверхность.
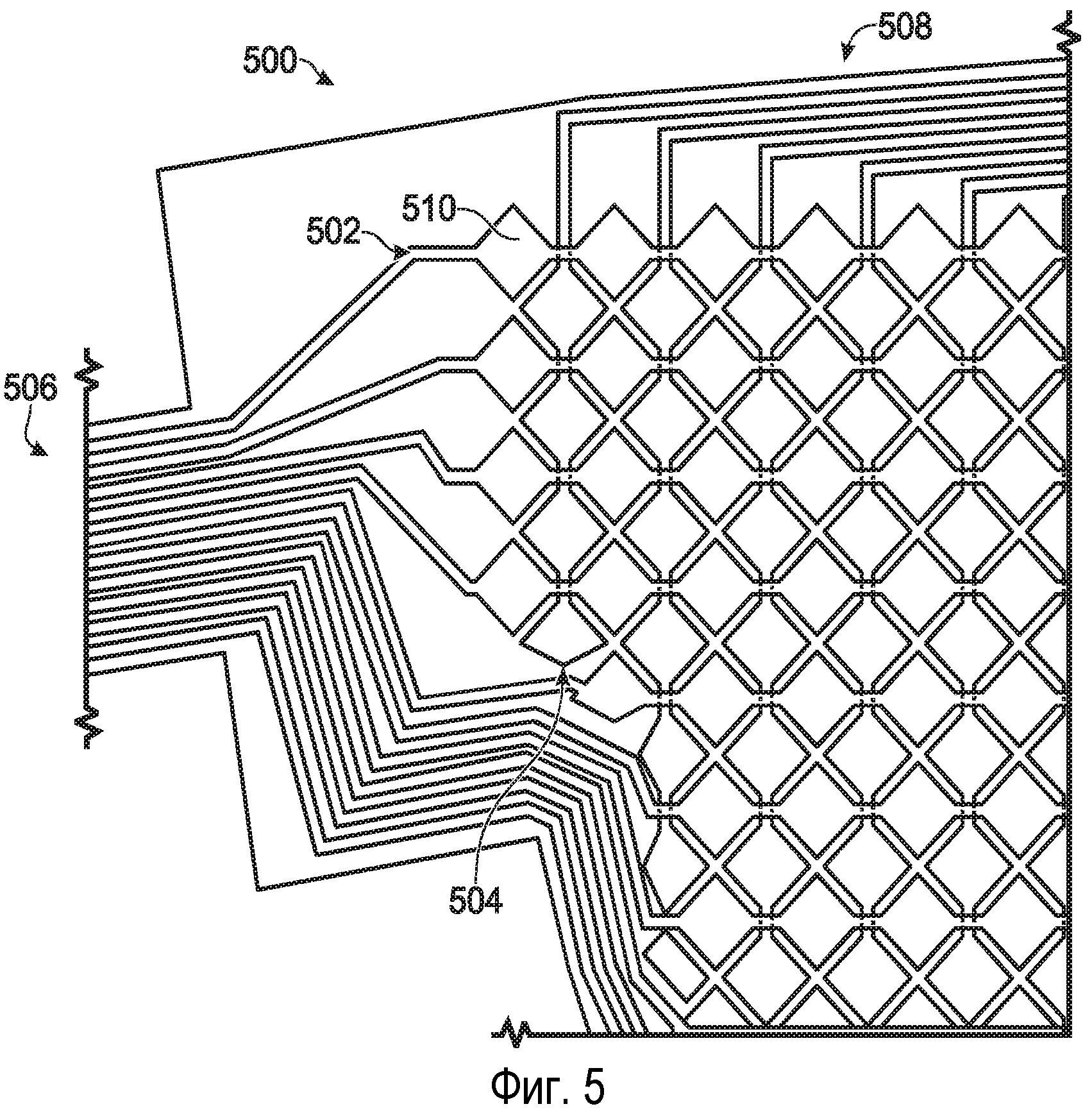
[0009] Фиг.5 показывает вариант осуществления расположения элемента датчика для емкостного механизма восприятия касания.
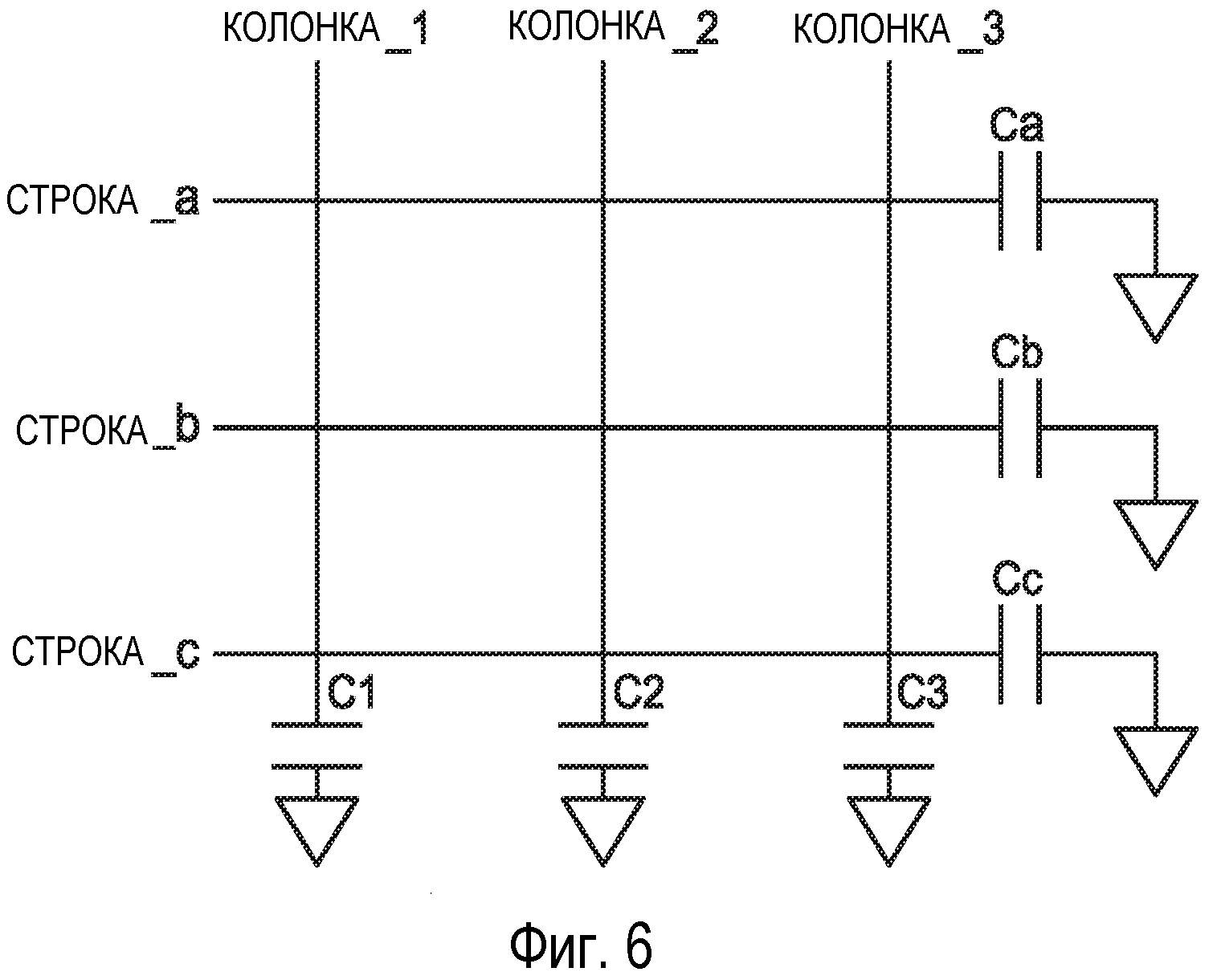
[0010] Фиг.6 показывает вариант осуществления конфигурации емкостной чувствительной к касанию схемы.
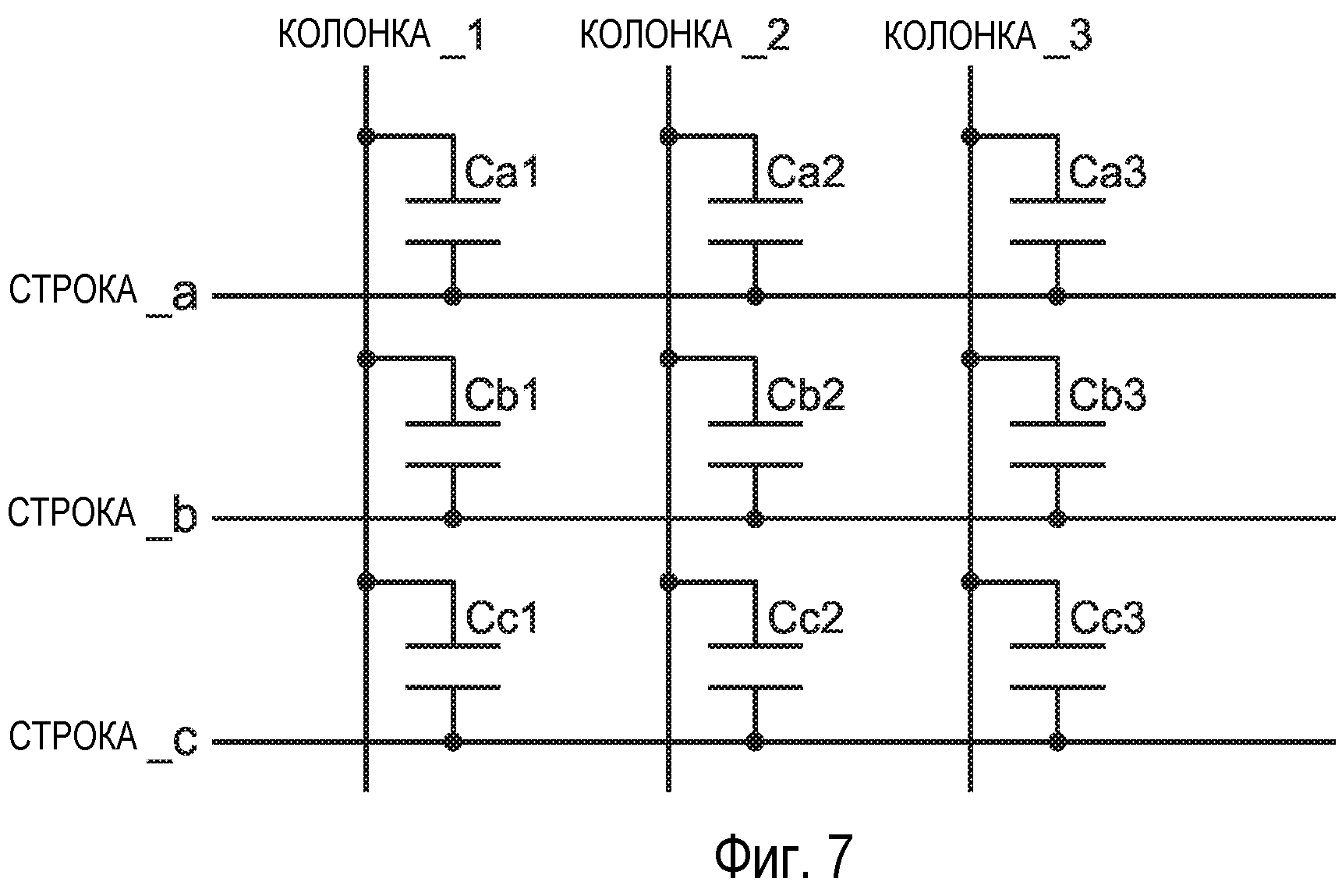
[0011] Фиг.7 показывает вариант осуществления другой конфигурации емкостной чувствительной к касанию схемы.
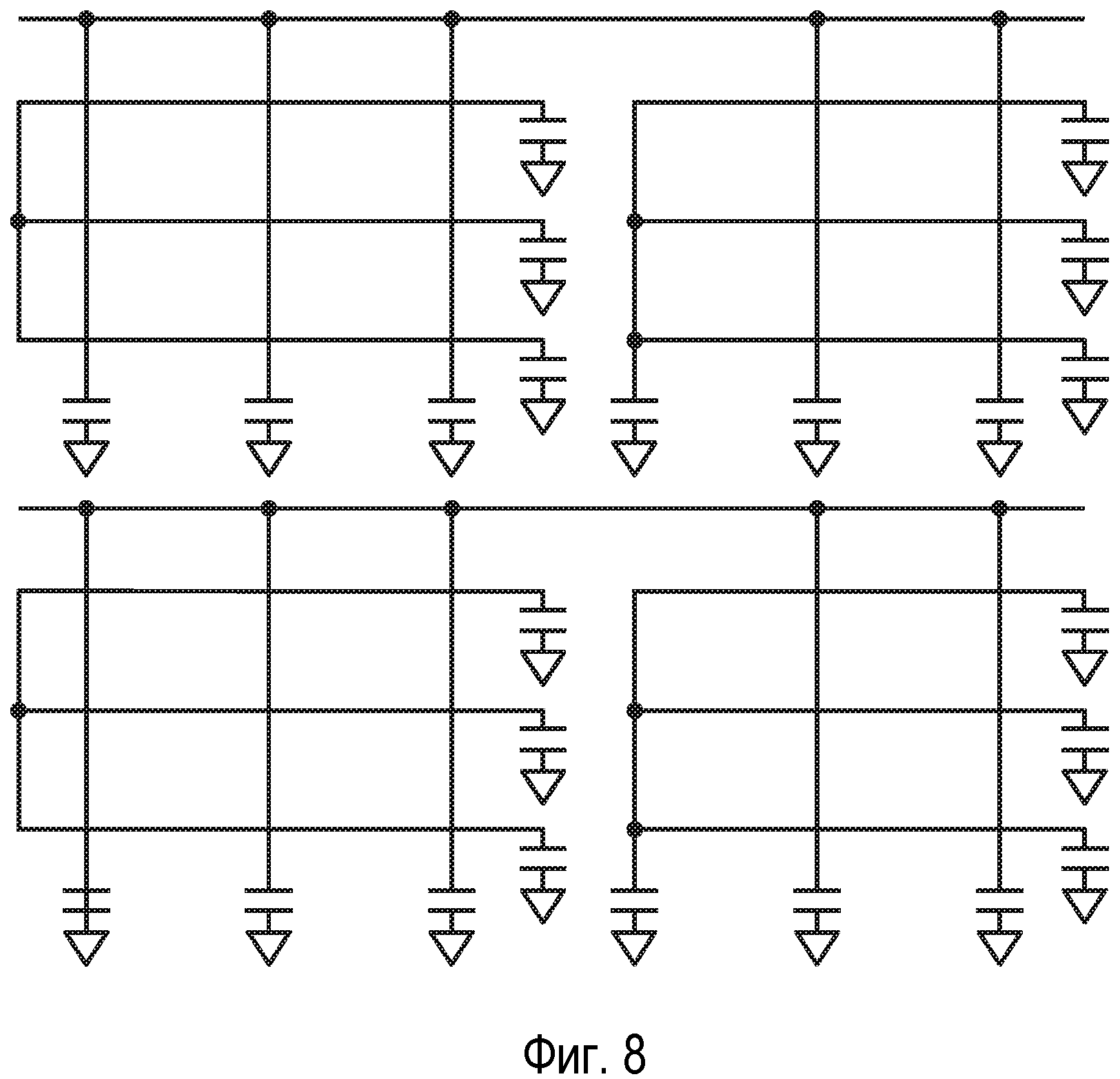
[0012] Фиг.8 показывает вариант осуществления другой конфигурации емкостной чувствительной к касанию схемы.
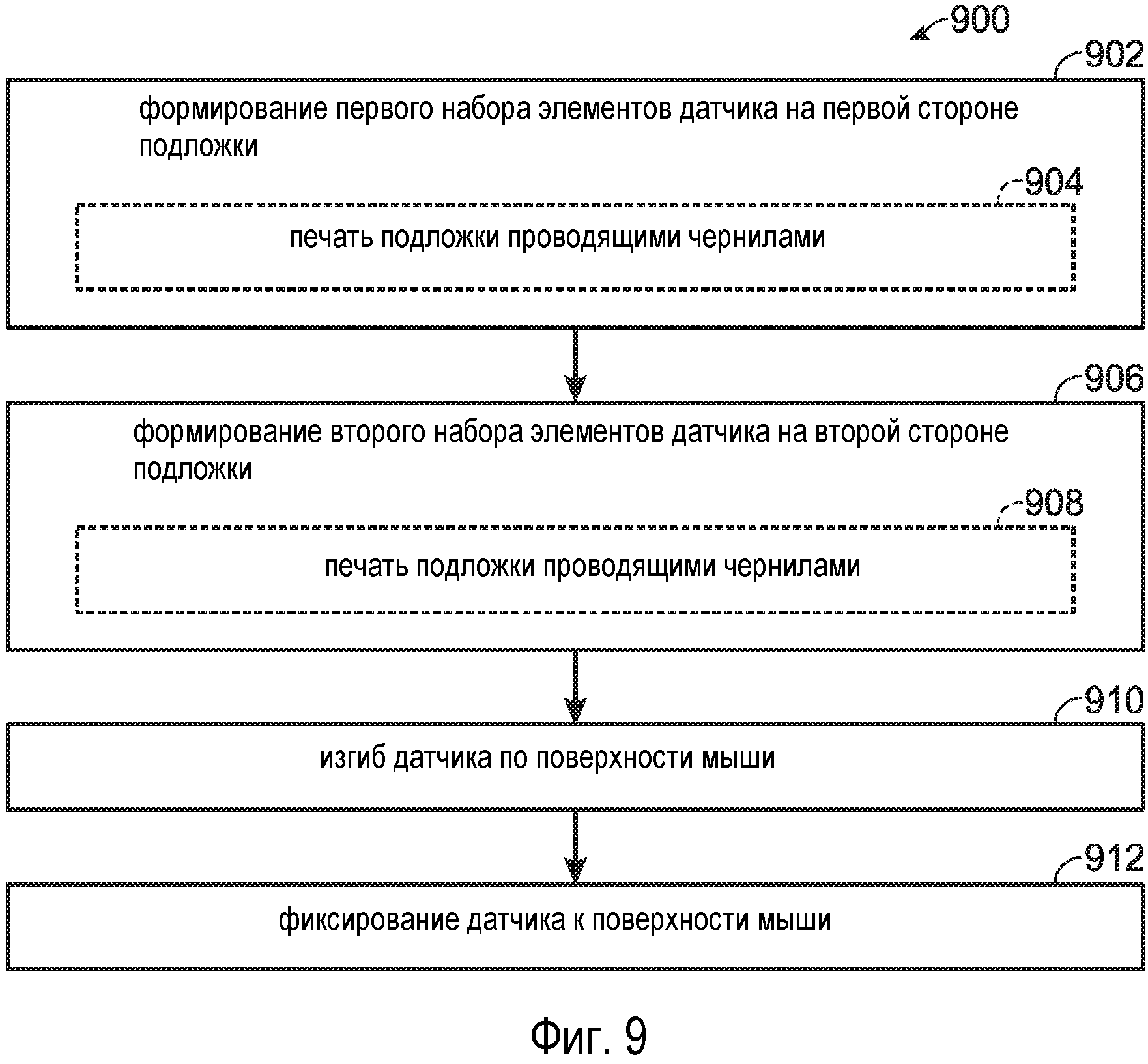
[0013] Фиг.9 показывает вариант осуществления способа изготовления компьютерной мыши с поверхностью множественных касаний.
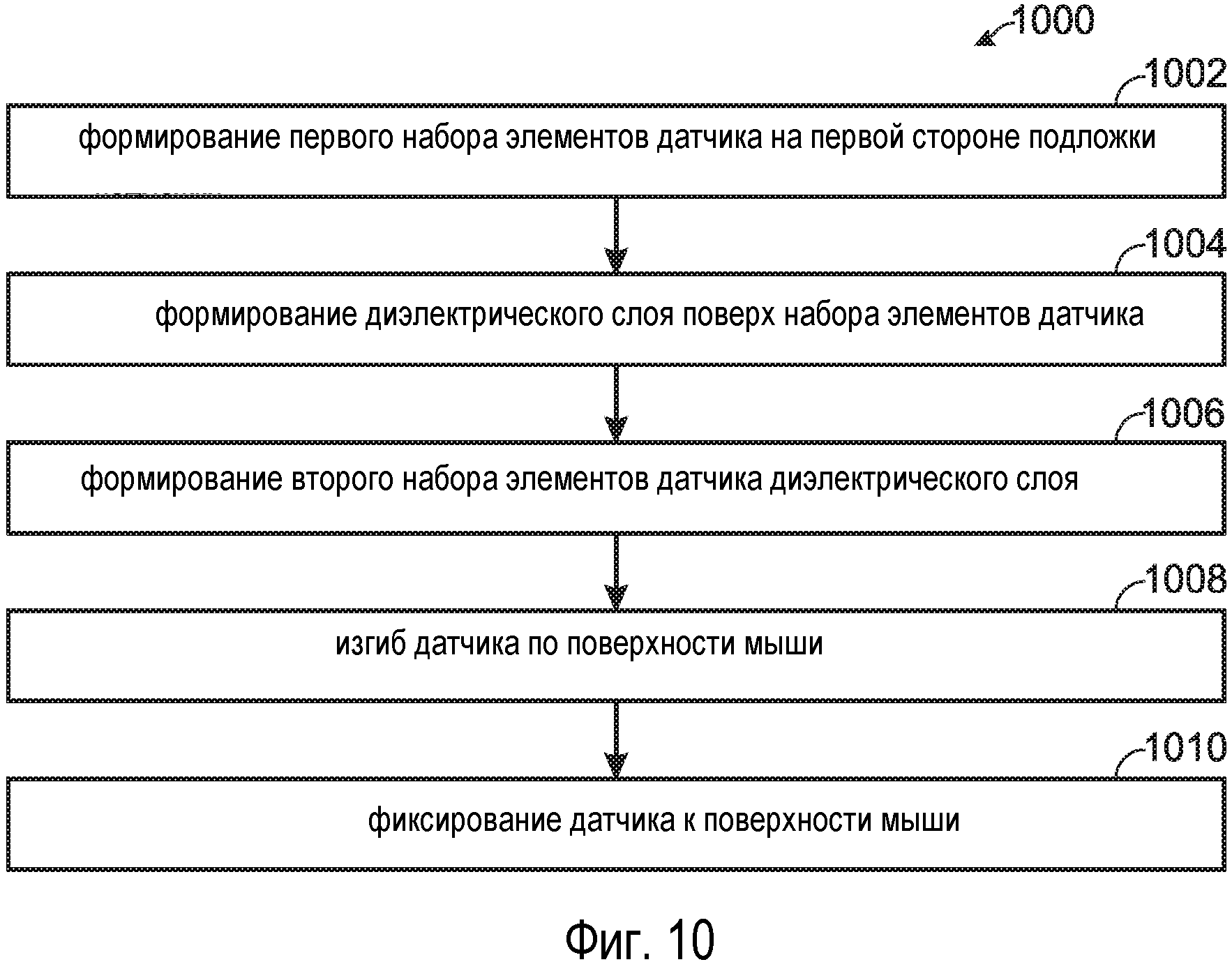
[0014] Фиг.10 показывает другой вариант осуществления способа изготовления компьютерной мыши с поверхностью множественных касаний.
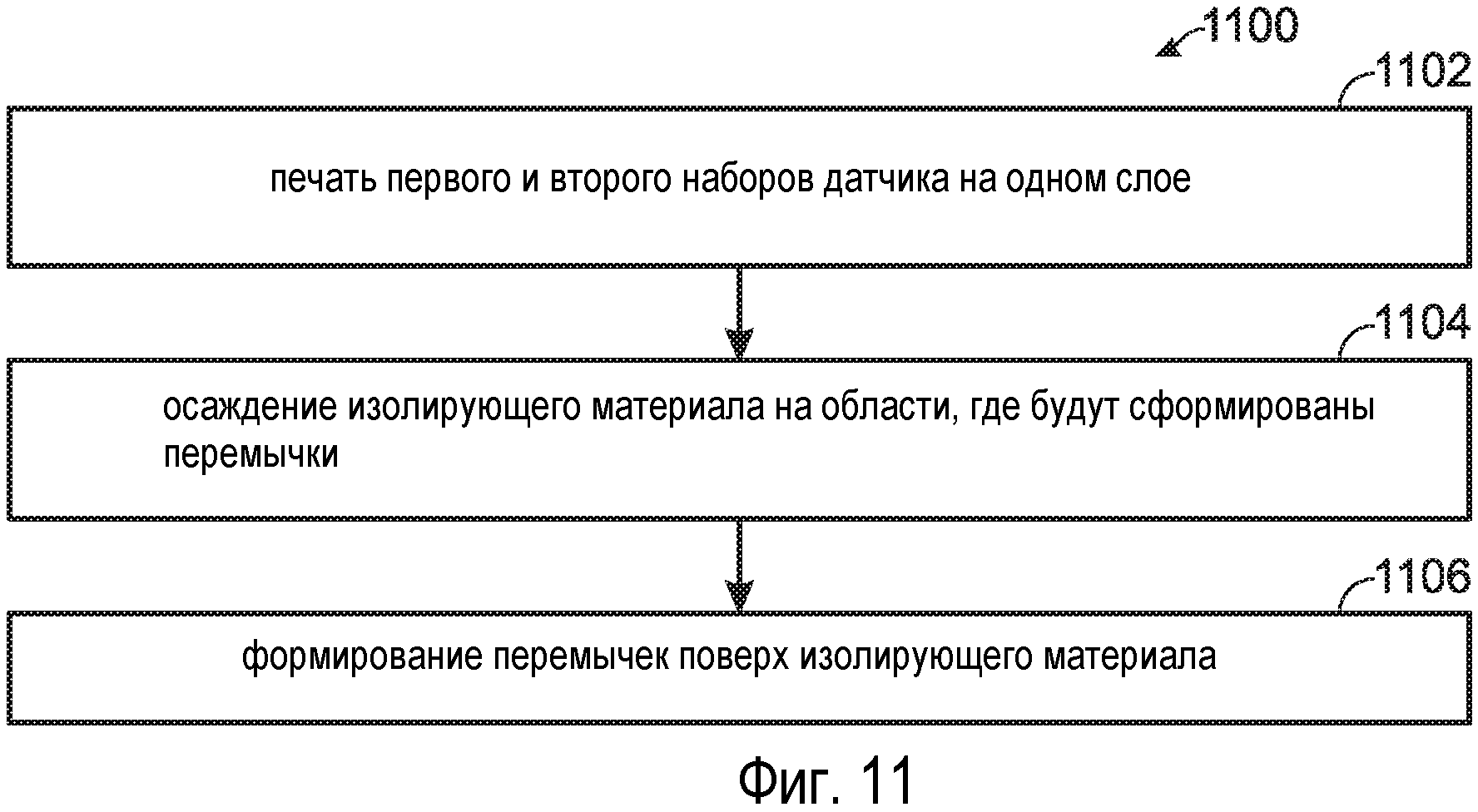
[0015] Фиг.11 показывает другой вариант осуществления способа изготовления компьютерной мыши с поверхностью множественных касаний.
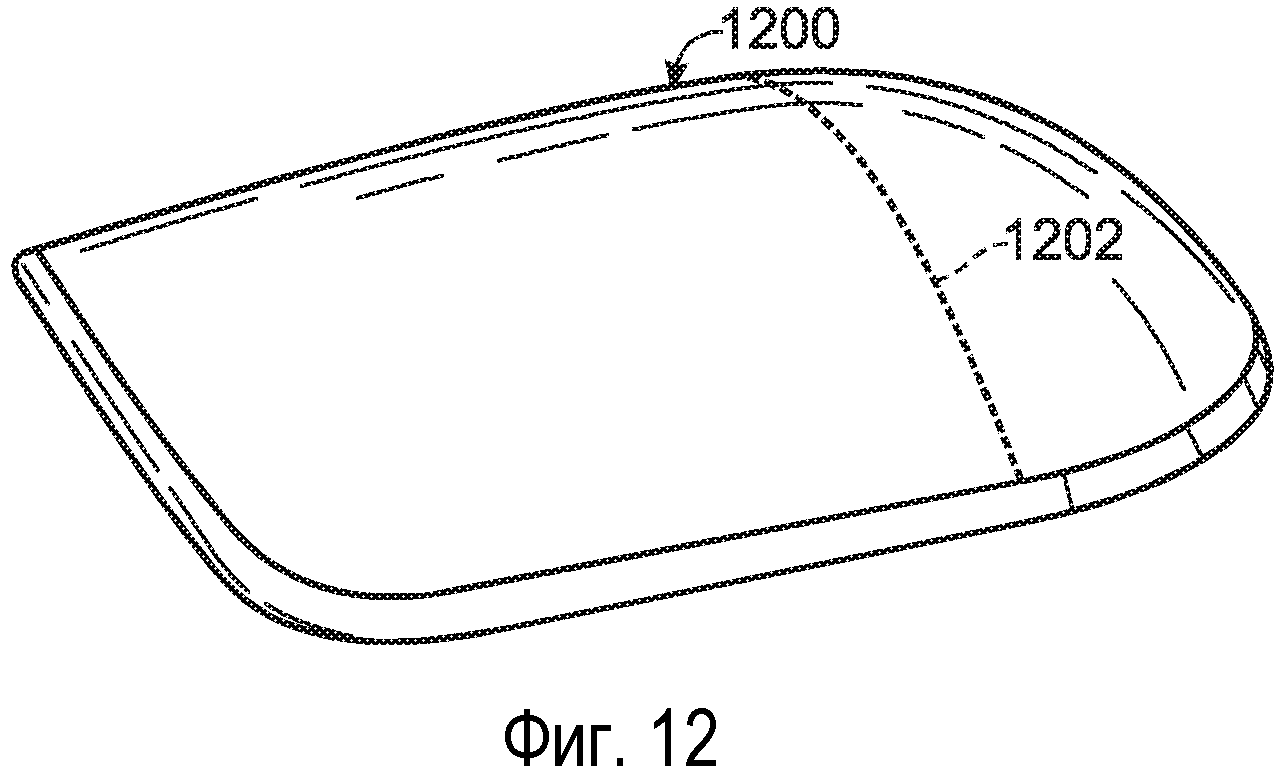
[0016] Фиг.12 показывает вариант осуществления мыши с развертываемой поверхностью, подходящий для использования с вариантами осуществления на Фиг.9-11.
[0017] Фиг.13 показывает вариант осуществления способа изготовления компьютерной мыши с поверхностью множественных касаний, имеющей сложную кривизну.
[0018] Фиг.14 показывает другой вариант осуществления способа изготовления компьютерной мыши с поверхностью множественных касаний, имеющей сложную кривизну.
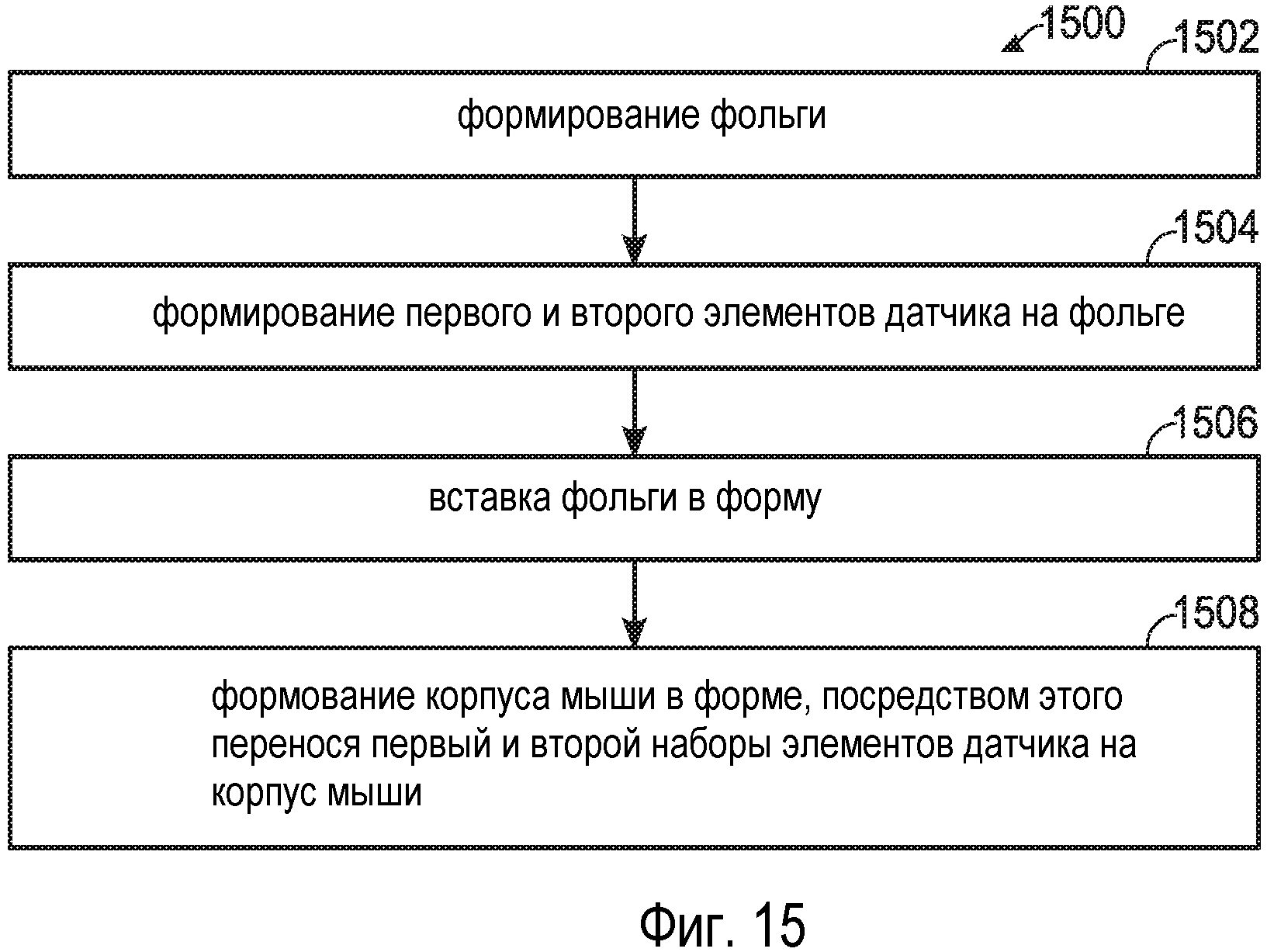
[0019] Фиг.15 показывает другой вариант осуществления способа изготовления компьютерной мыши с поверхностью множественных касаний, имеющей сложную кривизну.
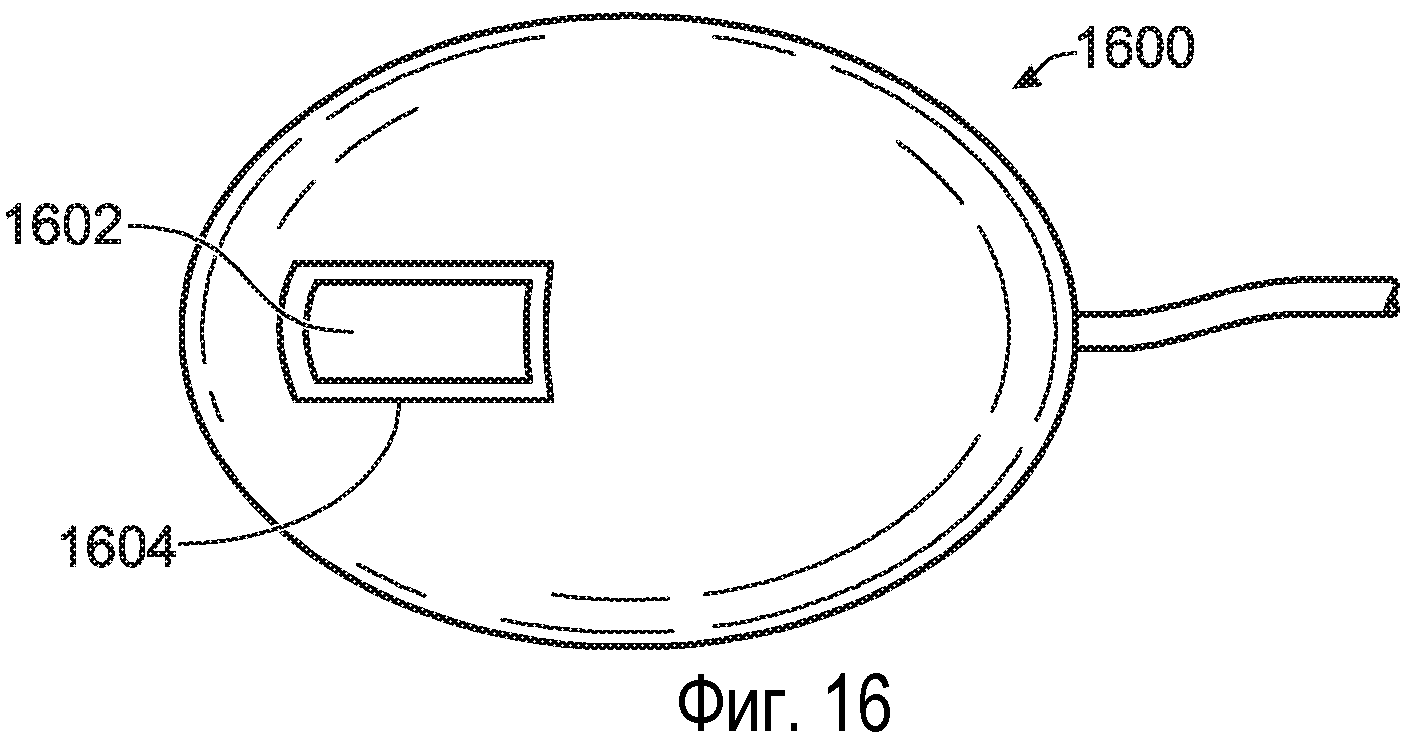
[0020] Фиг.16 показывает вариант осуществления компьютерной мыши, имеющей свет индикатора, который указывает границу области, чувствительной к касанию поверхности, которая отображается на конкретную функцию.
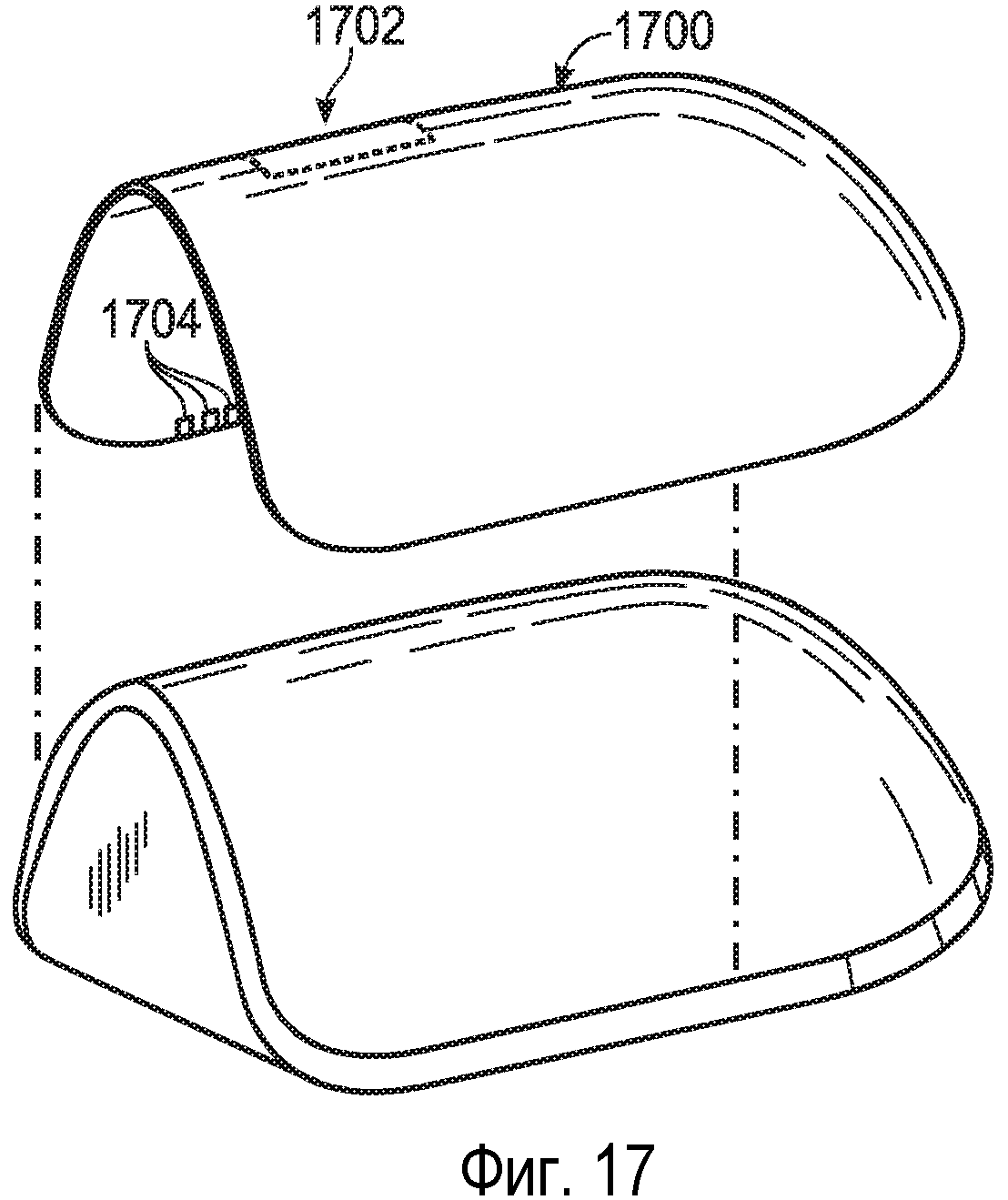
[0021] Фиг.17 показывает вариант осуществления крышки для компьютерной мыши, которая конфигурируется, чтобы отобразить конкретные функциональные возможности на одну или более областей датчика касания на компьютерной мыши.
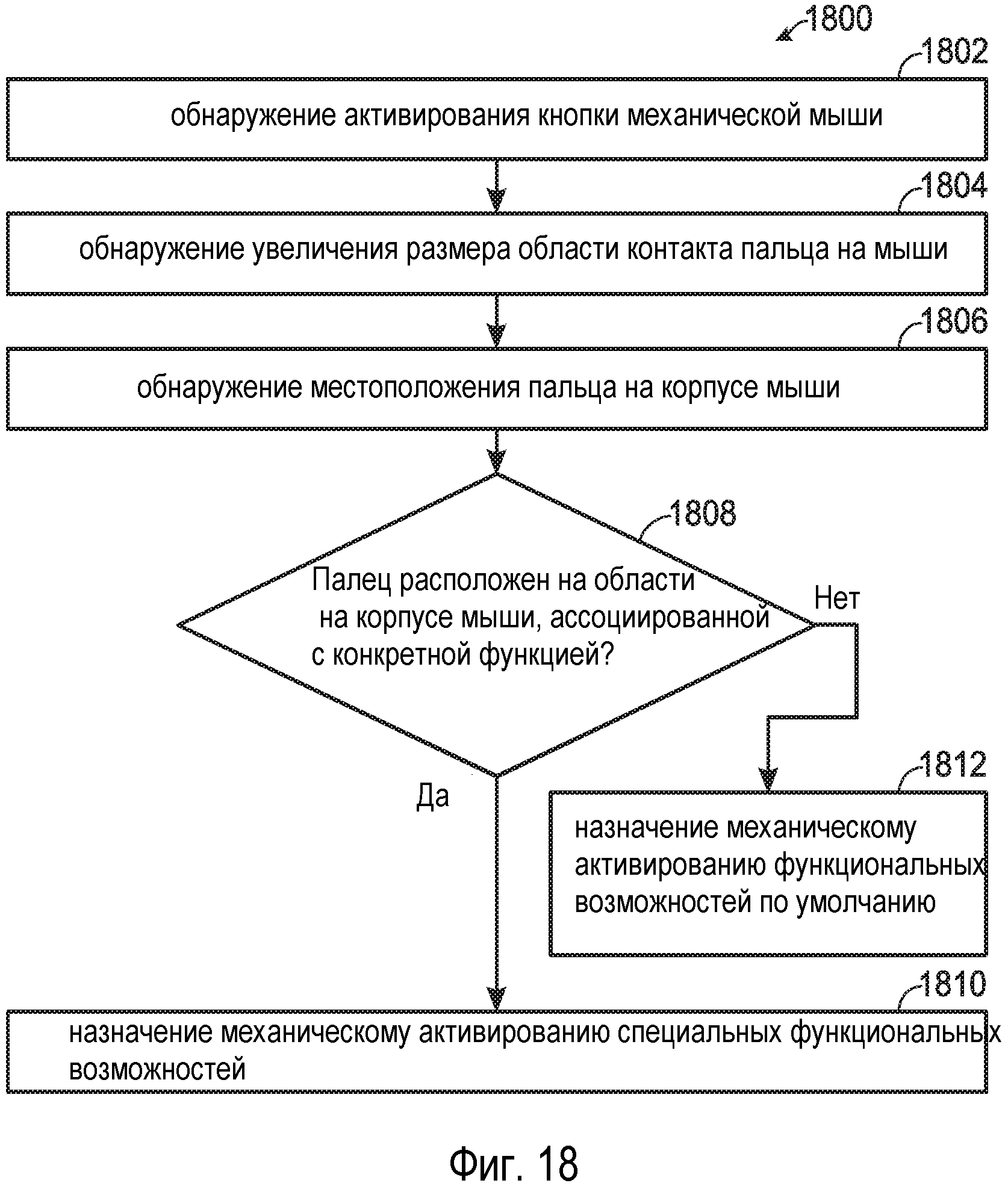
[0022] Фиг.18 показывает вариант осуществления способа для обнаружения области датчика касания на мыши, которая ассоциирована с активированием механического исполнительного механизма.
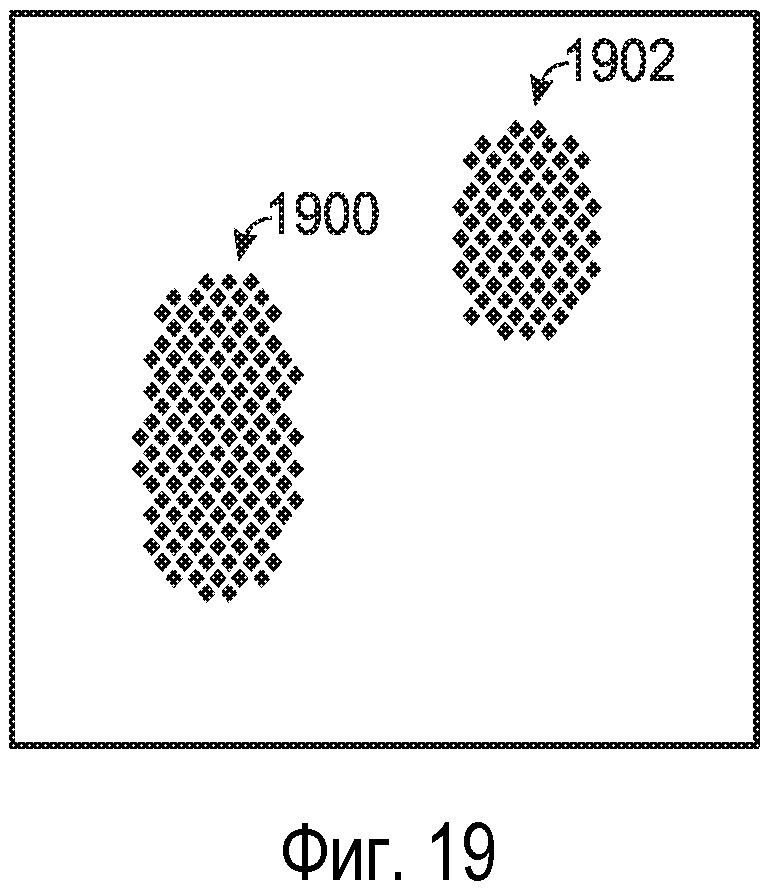
[0023] Фиг.19 показывает вариант осуществления сигнала, обнаруженного датчиком касания компьютерной мыши перед активированием механического исполнительного механизма.
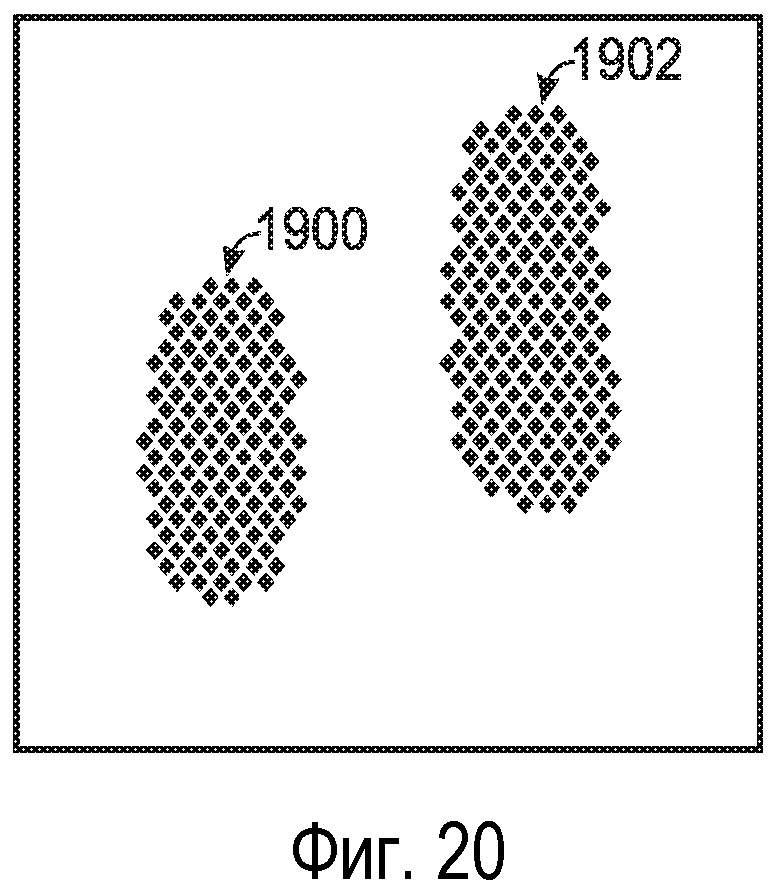
[0024] Фиг.20 показывает вариант осуществления сигнала, обнаруженного датчиком касания компьютерной мыши после приведения в действие механического исполнительного механизма.
[0025] Фиг.21 показывает варианты осуществления емкостного датчика касания и пьезорезистивного датчика давления, которые совместно используют общую совокупность электродов.
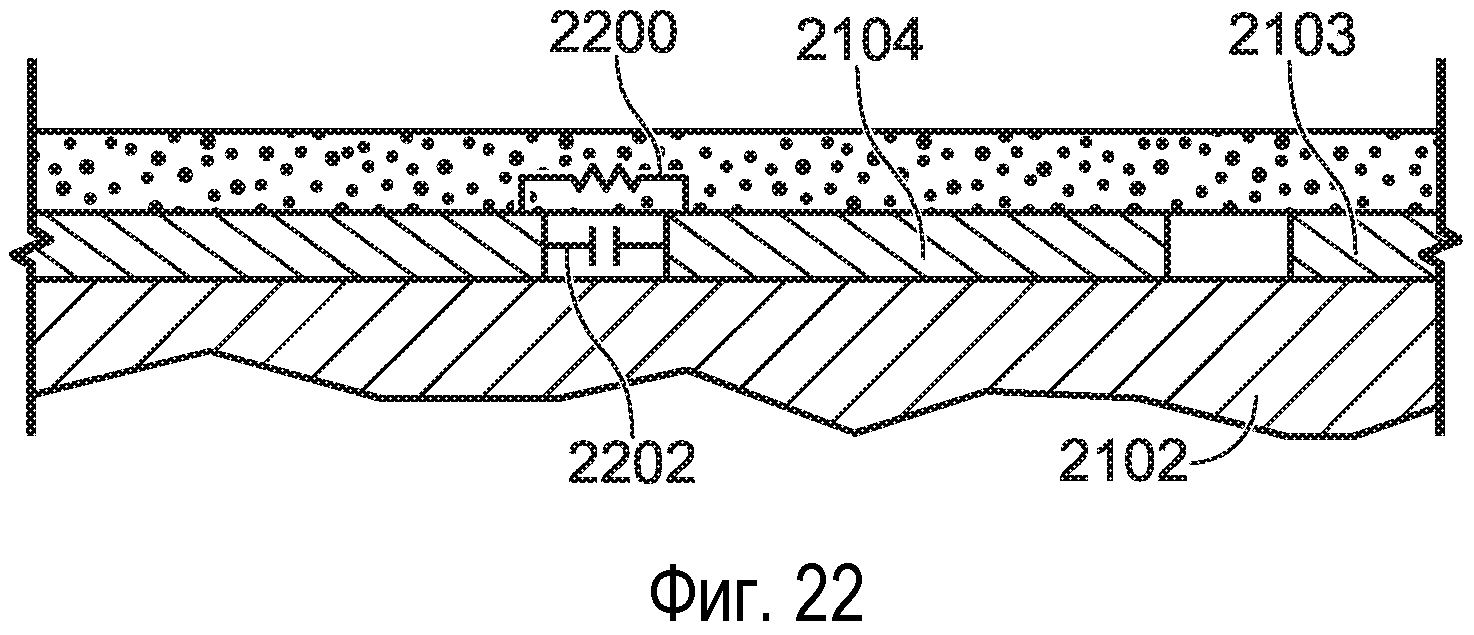
[0026] Фиг.22 показывает сечение варианта осуществления согласно Фиг.21 по линии 22-22 на Фиг.21.
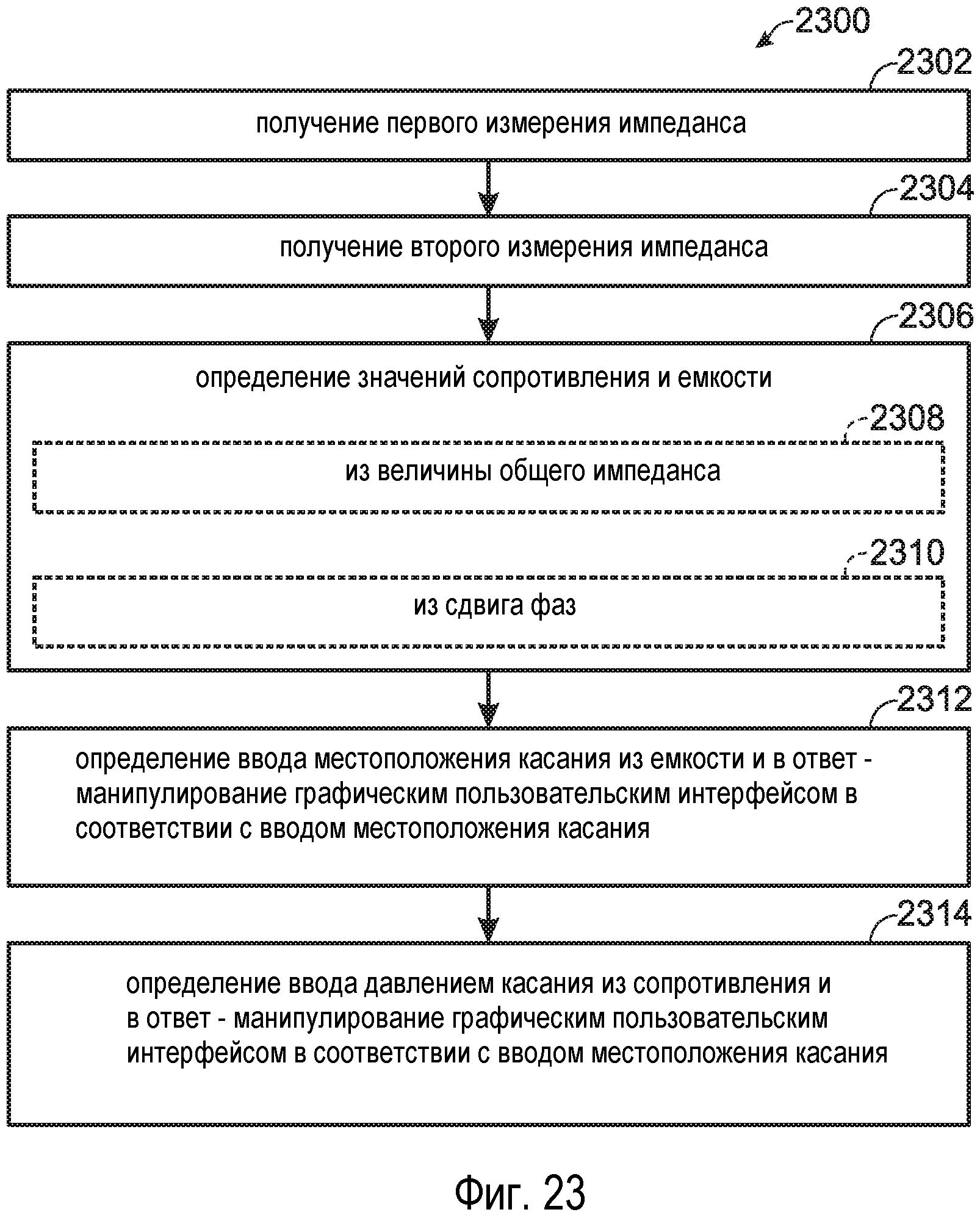
[0027] Фиг.23 показывает блок-схему, изображающую вариант осуществления способа измерения местоположения касания и давления касания с помощью варианта осуществления согласно Фиг.21.
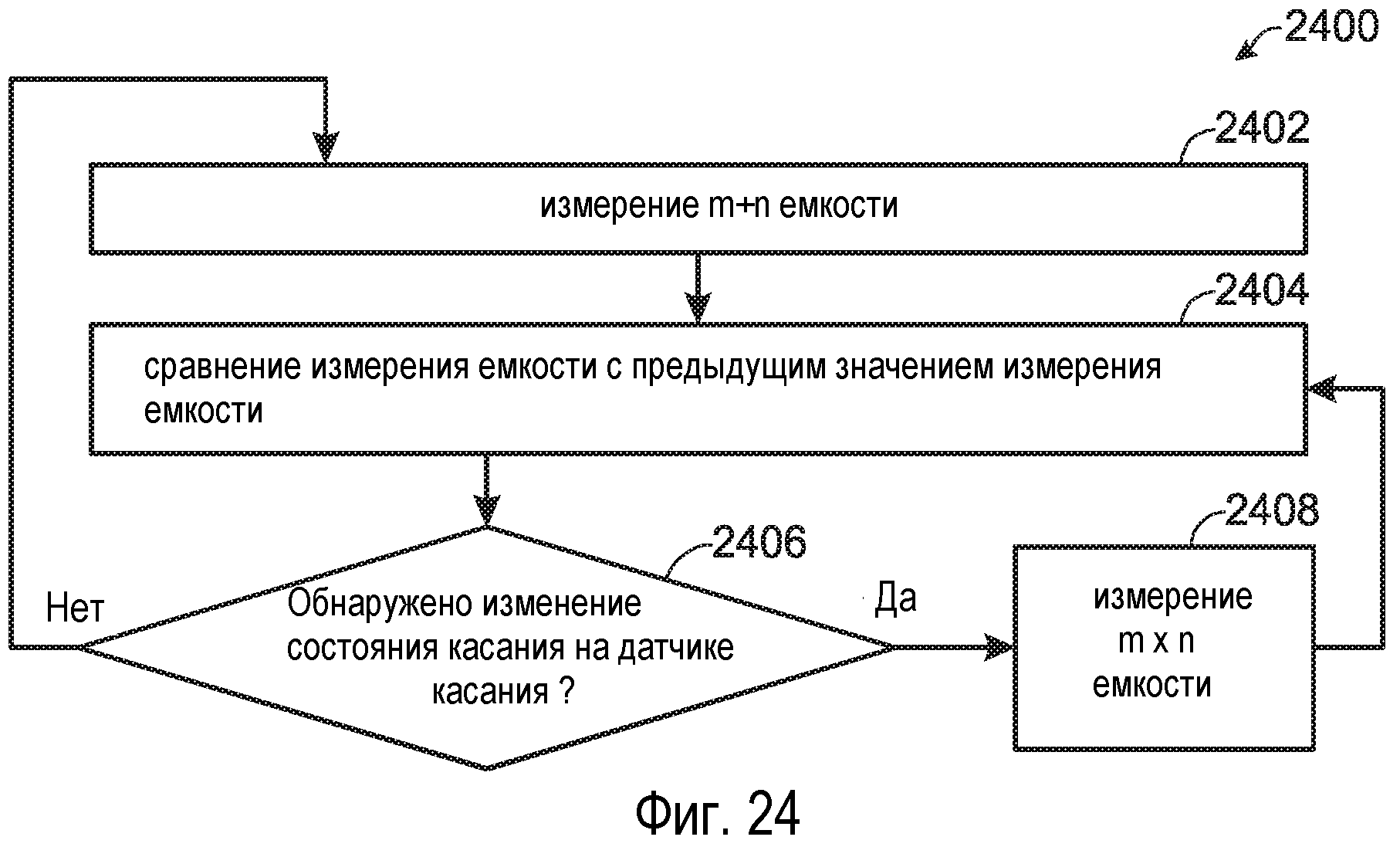
[0028] Фиг.24 показывает блок-схему, изображающую вариант осуществления способа работы емкостного датчика касания.
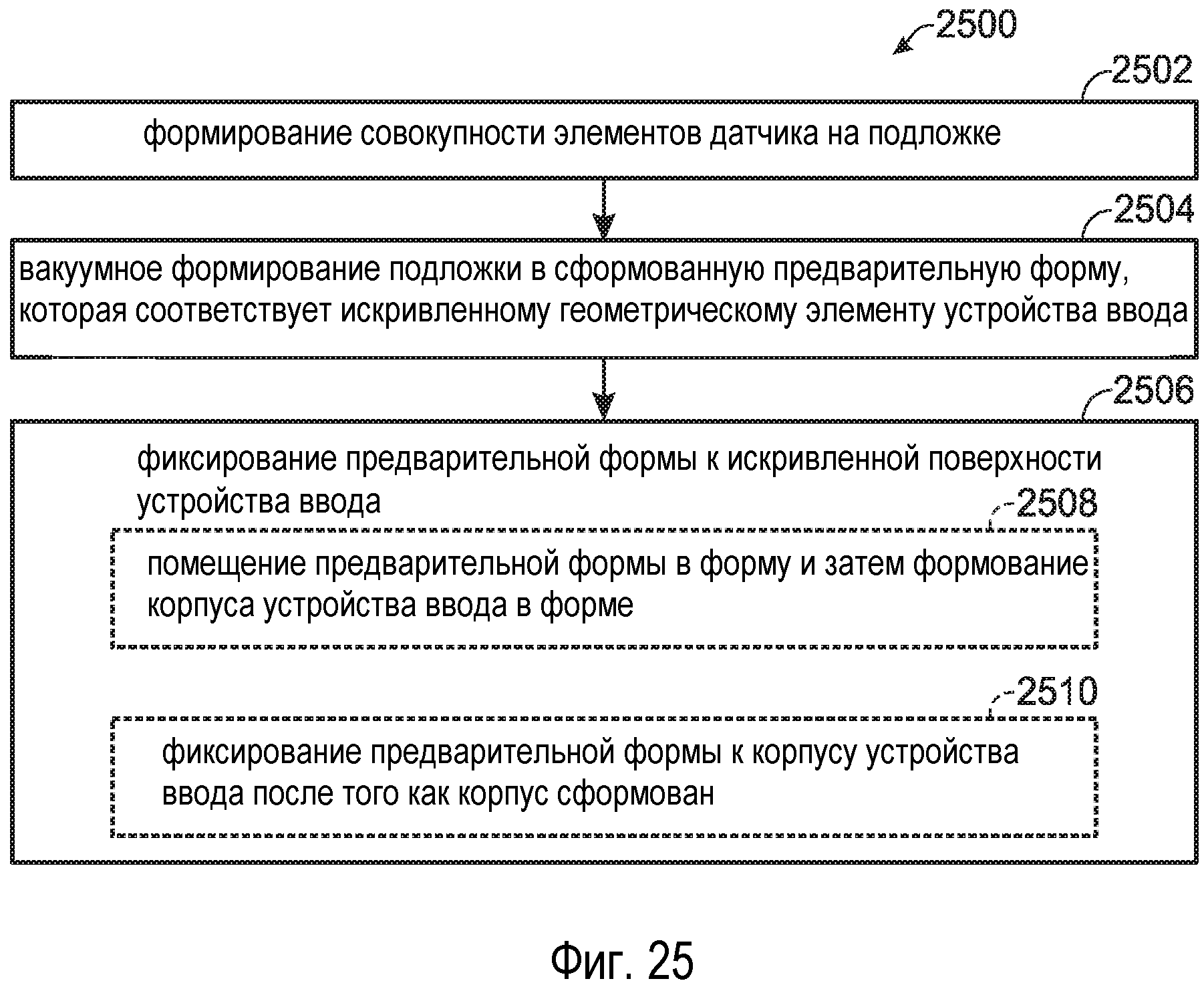
[0029] Фиг.25 показывает блок-схему, изображающую другой вариант осуществления способа формирования устройства ввода, содержащего датчик касания.
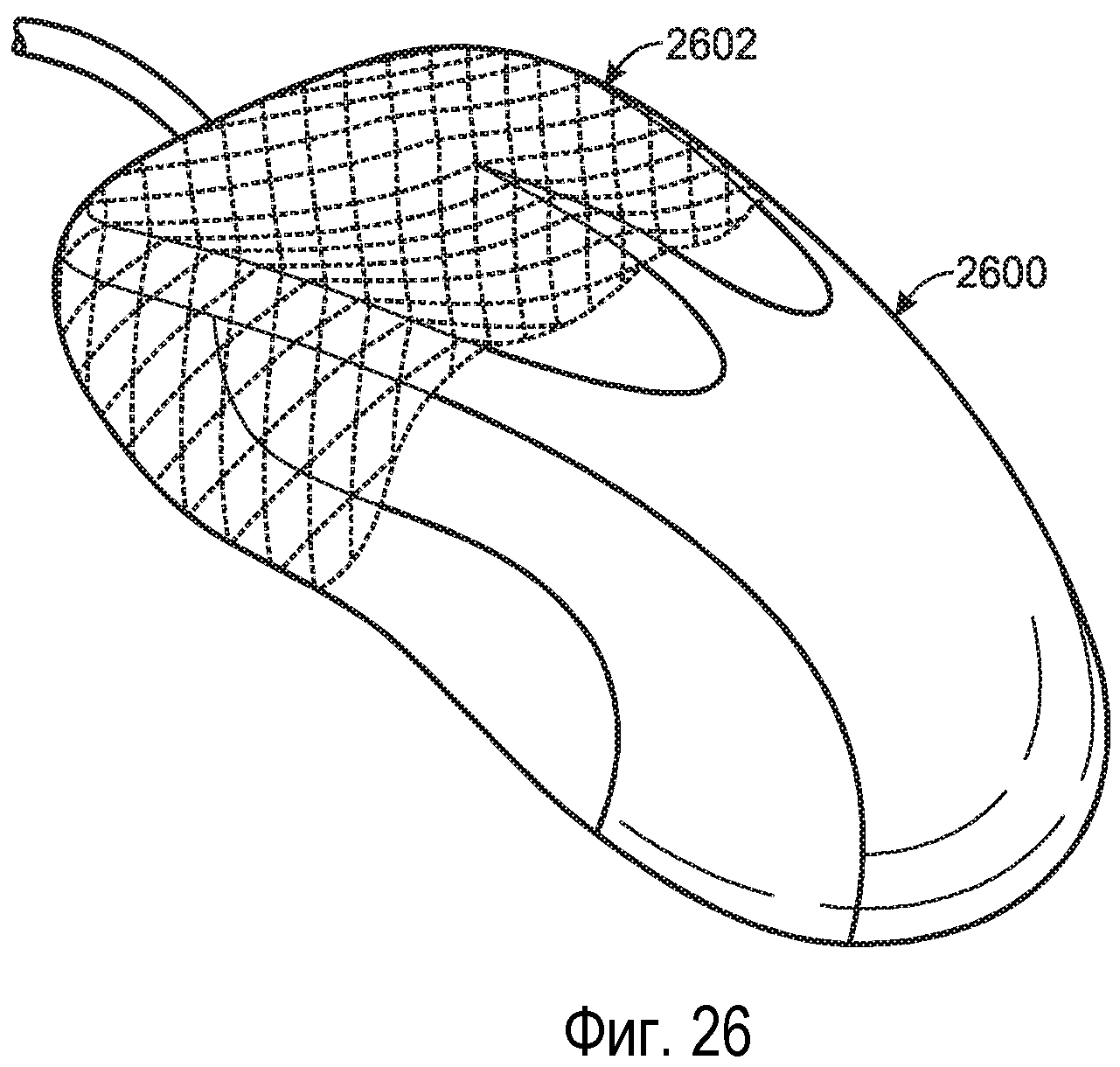
[0030] Фиг.26 показывает вариант осуществления компьютерной мыши, содержащей емкостный датчик касания, расположенный на неразворачиваемой поверхности мыши.
ПОДРОБНОЕ ОПИСАНИЕ
[0031] Варианты осуществления раскрыты в настоящем описании, которые относятся к устройствам ввода с кривыми поверхностями (для) множественных касаний. Например, некоторые варианты осуществления относятся к основанным на обнаружении местоположения вводам касанием на поверхности компьютерной мыши для использования в качестве ввода для вычислительного устройства. Термин "основанный на обнаружении местоположения ввод касанием" относится к любому вводу касанием, который включает в себя изменение в обнаруженном местоположении и/или области ввода касанием на датчике касания, а также присутствие и/или отсутствие касания в конкретной области датчика касания, и может включать в себя жесты, изменения в области касания и т.д. В некоторых вариантах осуществления механизм обнаружения касания может быть сконфигурирован, чтобы обнаружить множественные временно накладывающиеся касания (то есть, "множественные касания"), таким образом позволяя обнаружить жесты множества пальцев, сделанных на поверхности мыши. Дополнительно, в настоящем описании раскрыты варианты осуществления, которые относятся к конструкции датчика касания, который может использоваться на неплоских поверхностях, включая, но не ограничиваясь, искривленную поверхность компьютерной мыши. Эти варианты осуществления описаны более подробно ниже.
[0032] Фиг.1 показывает вариант осуществления компьютерной мыши 100, содержащей датчик 102 касания, который располагается на искривленном геометрическом элементе в форме передней части корпуса компьютерной мыши 100 (то есть, части мыши, сконфигурированной, чтобы контактировать с пальцами пользователя во время обычного использования). Изображенный датчик 102 касания занимает по существу всю выпуклость от одной стороны до другой стороны верхней поверхности компьютерной мыши 100 и может быть расположен на внутренней поверхности корпуса, внешней поверхности корпуса и/или встроен в корпус. Датчик 102 касания конфигурируется, чтобы обнаруживать позицию одного или более касаний датчика 102 касания. Этим способом датчик 102 касания может позволить отследить движение ввода касанием на датчике, таким образом позволяя обнаружить основанные на жесте вводы касанием. Должно быть понятно, что конкретная конфигурация и местоположение датчика 102 касания, показанного на Фиг.1, представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом, поскольку датчик касания или датчики касания могут быть обеспечены в любом желательном местоположении на компьютерной мыши. Например, в некоторых вариантах осуществления датчик касания может охватывать по существу всю поверхность компьютерной мыши. В других вариантах осуществления в некоторых вариантах осуществления датчик касания может простираться вдоль части выпуклости от стороны к стороне компьютерной мыши. В еще других вариантах осуществления отдельные датчики касания могут использоваться в различных местоположениях на поверхности компьютерной мыши. В еще других вариантах осуществления устройства ввода, отличные от компьютерной мыши, могут иметь искривленные геометрические элементы с воспринимающими касание возможностями.
[0033] Фиг.2 изображает пользователя, сжимающего компьютерную мышь 100 согласно Фиг.1, и Фиг.3 показывает результирующий сигнал 300, обнаруженный датчиком 102 касания пальцев пользователя, контактирующих с компьютерной мышью 100. Как может быть видно на Фиг.3, местоположение и область каждого из пальцев пользователя на датчике 102 касания обнаруживаются датчиком касания. Поэтому, периодически делая выборку выходного сигнала датчика 102 касания с подходящей частотой, движение каждого из пальцев пользователя на датчике 102 касания может быть прослежено. Такое движение затем может быть сравнено с ожидаемыми движениями, которые определяют распознанные жесты касания, чтобы определить, сделал ли пользователь ввод жестом касания. В то время как Фиг.3 изображает выходной сигнал датчика множественных касаний, должно быть понятно, что другие варианты осуществления могут использовать датчик касания, конфигурируемый, чтобы обнаружить одиночные касания. Кроме того, в других вариантах осуществления датчик касания может быть сконфигурирован, чтобы обнаружить "почти касания" (то есть, когда палец удерживается в непосредственной близости к, но не в прямом контакте, с датчиком касания). Это может позволить распознать состояние "почти контакта" и реализовать в ассоциированном программном обеспечении. Дополнительно, различие между состоянием "почти касание" и состоянием "касание" может быть определено, например, с помощью разности в измеренной интенсивности сигнала в местоположении касания/парения, и/или из присутствия или отсутствия сигнала давления от датчика давления, когда сигнал касания обнаружен от емкостного датчика касания.
[0034] Как упомянуто выше, изображенный датчик 102 касания может позволить обнаружить местоположения касания (и потенциально область) в противоположность простому присутствию/отсутствию касания. Поэтому, в дополнение к разрешению обнаружения статических позиций руки и пальца, датчик 102 касания позволяет обнаружить жесты касания. Термин "жест", как используется в настоящем описании, обозначает движение одного или более пальцев с целью сообщения системе намерения. Могут быть использованы различные типы жестов. Например, некоторые варианты осуществления могут распознать мгновенные жесты и непрерывные жесты. Мгновенные жесты могут содержать жесты, которые выполняются способом "от начала к концу" таким образом, что жест распознается после завершения жеста (например, после завершения движения и подъема пальца от датчика касания). Один пример таких мгновенных жестов - жест резкого движения (например, быстрое линейное движение одного или более пальцев через датчик касания), конфигурируемый, чтобы вызвать пролистывание списка, навигацию по истории браузера и т.д. Мгновенные жесты также могут содержать движение во множественных направлениях, например вдоль множественных линий и/или изогнутых путей. Например, пользователь может "тащить" редакторскую метку вставки ("ˬ"), чтобы вставить скопированный текст в текущем местоположении курсора в текстовом выборе. Подразумевается, что эти примеры мгновенных жестов представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом.
[0035] Непрерывные жесты, в противоположность мгновенным жестам, содержат жесты, которые позволяют пользователю задавать один или более параметров непрерывно и с отображением обратной связи, пока намерение пользователя не будет достигнуто. Одним примером непрерывного жеста является жест "движение двумя пальцами в разные стороны", в котором изменение расстояния между двумя пальцами на датчике множественных касаний может использоваться в качестве ввода, чтобы выполнить соответствующее сокращение размера фотографии или другого манипулируемого объекта, изменение в уровне звука, издаваемого вычислительным устройством, и т.д. Аналогично, жест "растяжения", при котором увеличивается расстояние между двумя пальцами на датчике множественных касаний, может использоваться, чтобы выполнить соответствующее увеличение размера фотографии или другого объекта. Другие примеры непрерывных жестов включают в себя, но не ограничены, пролистывание списка посредством перемещения пальца по списку в направлении пролистывания, вращение объекта посредством изменения ориентации двух пальцев относительно друг друга над объектом и т.д.
[0036] Является ли жест непрерывным, мгновенным или другим типом жеста, датчик 102 касания на изображенной компьютерной мыши 100 обеспечивает преимущество разрешения пользователю выполнить основанные на жесте вводы, не имея необходимости снимать руку с компьютерной мыши 100, чтобы перемещать ее к клавиатуре чувствительному к касанию дисплею или другому такому устройству ввода.
[0037] Компьютерная мышь 100 может предложить различные преимущества перед использованием чувствительного к касанию дисплея, чтобы выполнить вводы касанием, поскольку компьютерная мышь 100 позволяет поддерживать многие из преимуществ чувствительного к касанию устройства ввода, в то же время избегая различных проблем с чувствительными к касанию дисплеями. Например, чувствительные к касанию дисплеи, используемые в качестве мониторов для вычислительных устройств, часто содержат вертикально ориентируемый экран дисплея, конфигурируемый, чтобы быть обращенным к пользователю, сидящему перед дисплеем. В то время как такие чувствительные к касанию дисплеи предлагают выгоду прямого соответствия между пальцами пользователя и графическим объектом, которым манипулируют на чувствительном к касанию дисплее, взаимодействие с таким чувствительным к касанию дисплеем может вовлечь намного большее количество физических усилий, чем основанное на мыши взаимодействие. Например, расширенное использование вертикально ориентируемого чувствительного к касанию дисплея может вызвать существенную усталость в руке, используемой для выполнения вводов касанием.
[0038] Напротив, компьютерная мышь 100 позволяет пользователю перемещать местоположение взаимодействия (например, курсор, указатель и т.д.) на большие расстояния на экране с небольшим усилием и также позволяет выполнять жесты ввода касанием в этом местоположении, поддерживая контакт руки с компьютерной мышью 100. Дополнительно, увеличенная стоимость добавления датчика касания к компьютерной мыши может быть меньшей, чем увеличенная стоимость добавления датчика касания к устройству отображения, поскольку более простые производственные процессы (например, печать (фотолитография) проводящих чернил в зависимости от осаждения окиси индия и олова) и менее дорогие материалы могут использоваться, чтобы изготовить датчик касания для мыши, чем для устройства отображения. Дополнительно, датчик касания для компьютерной мыши может быть значительно меньшим, чем датчик касания для устройства отображения, что может помочь дополнительно уменьшить производственные затраты на датчик касания для компьютерной мыши по сравнению с таковыми для устройства отображения.
[0039] Фиг.4 показывает блок-схему варианта осуществления компьютерной мыши 400, который включает признаки различных вариантов осуществления, описанных в настоящем описании, включая, но не ограничиваясь, компьютерную мышь 100. Компьютерная мышь 400 содержит детектор 402 движения, который позволяет компьютерной мыши 400 отслеживать движение на поверхности отслеживания, такой как коврик для мыши, стол и т.д. Изображенный детектор 402 движения включает в себя источник 404 света, такой как лазер или светоизлучающий диод, конфигурируемый, чтобы испускать свет к поверхности отслеживания, а также датчик 406 изображения, конфигурируемый, чтобы принимать свет, отраженный от поверхности отслеживания, чтобы периодически захватывать изображения поверхности отслеживания для обнаружения движения.
[0040] Компьютерная мышь 400 дополнительно содержит датчик 410 касания, расположенный на поверхности компьютерной мыши 400, с которой контактируют пальцы пользователя во время обычного использования. В некоторых вариантах осуществления компьютерная мышь 400 может содержать единственный емкостный датчик множественных касаний, в то время как в других вариантах осуществления компьютерная мышь 400 может содержать более чем один датчик касания, расположенные в различных местоположениях на поверхности компьютерной мыши. В некоторых вариантах осуществления датчик 410 касания может содержать емкостной датчик касания, в то время как в других вариантах осуществления датчик касания может содержать резистивный или другой подходящий датчик касания. Кроме того, в некоторых вариантах осуществления датчик касания может быть сконфигурирован, чтобы обнаружить множественные перекрывающиеся во времени касания, в то время как в других вариантах осуществления датчик касания может быть сконфигурирован, чтобы обнаружить одиночные касания.
[0041] Кроме того, компьютерная мышь 400 включает в себя систему 412 ввода/вывода, чтобы обеспечить связь с вычислительным устройством. Примеры подходящих систем ввода/вывода включают в себя, но не ограничиваются, интерфейс 414 USB и/или систему 416 беспроводной связи, которая обеспечивает беспроводную передачу информации через подходящий протокол, такой как Bluetooth, и т.д.
[0042] В некоторых вариантах осуществления компьютерная мышь 400 может необязательно содержать одну или более механических кнопок, как показано механическим исполнительным механизмом 418. Как объяснено более подробно ниже, компьютерная мышь 400 может быть сконфигурирована, чтобы отобразить касания, жесты, положения руки и т.п., используемые в соединении с механическим активированием, на специфические функции мыши, включая, но не ограничиваясь, обычные действия мыши, такие как "щелчок правой клавишей". В то время как изображенный вариант осуществления включает в себя единственный механический исполнительный механизм, подразумевается, что другие варианты осуществления могут включать в себя множественные механические исполнительные механизмы. Например, в вариантах осуществления мышь может включать в себя левую и правую механические кнопки (как обычная мышь), где каждая кнопка содержит датчик касания, способный к обнаружению вводов касанием, сделанных на поверхности кнопки.
[0043] В других вариантах осуществления другие механизмы обратной связи и обнаружения могут быть обеспечены в дополнение или вместо механического исполнительного механизма. Например, относительно механизмов обратной связи, мышь может быть сконфигурирована, чтобы вибрировать в ответ на обнаружение выбранного ввода (например, ввод касанием, соответствующий функциональным возможностям щелчка правой клавишей). Кроме того, мышь может включать в себя звуковой выход таким образом, что мышь может выдавать "щелкающий" звук после обнаружения щелчка правой клавишей или другого такого ввода. Дополнительно, контроллер может быть сконфигурирован, чтобы выводить сигнал, который конфигурируется, чтобы инициировать звуковую обратную связь от вычислительного устройства, соединенного с мышью, в ответ на выбранный ввод касанием. Должно быть понятно, что эти механизмы обратной связи представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом.
[0044] Аналогично, относительно механизмов обнаружения, вместо или в дополнение к механическому исполнительному механизму, мышь также может включать в себя один или более датчиков 419 давления, таких как резистивный датчик давления. Например, такой датчик давления может быть помещен на внутреннюю поверхность корпуса мыши. Когда пользователь надавливает на корпус мыши (например, чтобы выполнить ввод "щелчком правой клавишей"), датчик давления может обнаружить это надавливание, например, посредством небольшой деформации поверхности мыши. Это, наряду с вводом от датчика касания, может использоваться, чтобы отличить различные действия, такие как "щелчок правой клавишей" и т.д.
[0045] Продолжая со ссылкой на Фиг.4, в некоторых вариантах осуществления компьютерная мышь 400 может необязательно содержать один или более источников света, иллюстрированных как "источник света 1" 420 и "источник света n" 422, где n - целое число, имеющее значение ноль или более. Как описано более подробно ниже, источники света 420, 422 могут использоваться, чтобы очертить конкретные области датчика 410 касания, когда эти области отображены на конкретные функции. Например, когда компьютерная мышь 400 используется, чтобы пролистать список, часть датчика 410 касания может быть отображена, чтобы иметь конкретную функцию колесика прокрутки. Часть датчика 410 касания, отображенная на функцию колесика прокрутки, может быть затем ограничена посредством активирования соответствующего источника света 420, 422 для подсветки этой области, например, оконтуривая эту область, посредством освещения всей этой области, или любым другим подходящим образом.
[0046] Продолжая со ссылкой на Фиг.4, компьютерная мышь 400 содержит контроллер 430, имеющий память 432 и различные логические компоненты, представленные процессором 434. Память 432 может содержать считываемые компьютером инструкции, сохраненные в ней, которые выполнимы процессором 434, чтобы разрешить работу компьютерной мыши 400. Например, инструкции могут быть выполнимыми, чтобы принять ввод от детектора 402 движения, датчика 410 касания и механического исполнительного механизма 418, обработать эти сигналы и выдать соответствующие управляющие сигналы к источникам света 420, 422 и на вычислительное устройство для взаимодействия с графическим пользовательским интерфейсом.
[0047] В некоторых вариантах осуществления инструкции являются выполнимыми процессором 434, чтобы обеспечить управляющие сигналы, которые распознаются обычным драйвером мыши, запущенным на вычислительном устройстве. В этом случае компьютерная мышь 400 может использоваться совместно с вычислительными устройствами, выполняющими традиционные драйверы мыши, таким образом обеспечивая обратную совместимость компьютерной мыши 400. В качестве более конкретного примера, когда часть датчика 410 касания отображена на функциональные возможности колесика прокрутки, сигналы касания, принятые в отображенной части датчика 410 касания, могут быть преобразованы в обычные сигналы колесика прокрутки, которые выдаются в вычислительное устройство. Аналогично, приведение в действие механического исполнительного механизма 418 и/или датчика 419 давления, которое обнаруживается как "щелчок левой клавишей" или "щелчок правой клавишей" (например, нажатие обычной левой или правой кнопки мыши) посредством сигналов от датчика 410 касания, может быть преобразовано в обычные сигналы "щелчок левой клавишей" или "щелчок правой клавишей" в соответствии с обычной мышью. Должно быть понятно, что эти примеры преобразования сигналов от датчика 410 касания, механического исполнительного механизма 418 и/или датчика 419 давления в сигналы обычной мыши представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом.
[0048] Емкостной датчик 410 касания может иметь любую подходящую конфигурацию, чтобы обнаружить касание посредством емкости. Фиг.5 показывает пример одной подходящей конфигурации 500 для емкостного датчика 410 касания, который содержит множество строк (рядов) элементов датчика, один пример которых обозначен 502, и множество колонок элементов датчика, один пример которых обозначен 504, которые вместе формируют множество пикселей, каждый конфигурируемый, чтобы обнаруживать касание в местоположении на корпусе над пикселем. Строки элементов 502 датчика отделены от колонок элементов 504 датчика посредством диэлектрического слоя. Первое множество выводов 506 соединяют строки элементов 502 датчика к электропитанию и/или заземлению (в противоположном конце строки, не показано), и второе множество выводов 508 соединяют колонки элементов 504 датчика к электропитанию и/или заземлению (в противоположном конце колонки, не показано). В изображенном варианте осуществления каждый элемент датчика, один из которых обозначен 510, имеет прямоугольную форму, которая соединена со смежными элементами датчика в одной и той же строке или колонке в противоположных углах. Однако, очевидно, что элемент датчика может иметь любую другую подходящую форму, чем та, которая показана.
[0049] Любая подходящая схема может использоваться, чтобы обнаружить касание с помощью датчика 410 касания. Человеческое тело является отчасти электрически проводящим, и люди обычно находятся в хорошем контакте с электрическим заземлением через их окружение. Емкость от пальцев пользователя на землю типично составляет приблизительно 1000 пикофарад. Влияние этой емкости на измеренную емкость местоположения датчика 410 касания в контакте с или вблизи к пальцу пользователя может быть измерена различными способами. Например, в некоторых вариантах осуществления емкость от элемента 510 датчика на землю может быть измерена, как показано на Фиг.6. Когда пользователь приближается и касается элемента датчика, емкость на землю этого элемента датчика будет увеличиваться. Информация относительно изменений емкости строк и колонок позволяет контакту быть отображенным (поставленным в соответствие) на область датчика, соответствующую пересечению между воздействуемой строкой и воздействуемой колонкой.
[0050] В других вариантах осуществления емкость может быть измерена посредством измерения между элементами датчика строки и элементами датчика колонки, как показано на Фиг.7. Когда пользователь подходит близко к границе между элементами датчика, емкость пользователя на землю разрушает поле в этом местоположении и измеренная емкость между элементами датчика уменьшается.
[0051] В других вариантах осуществления емкость может быть измерена от элемента датчика на землю, как описано выше для Фиг.6, но используя элементы датчика, которые расширяют часть колонки и/или часть строки. Это иллюстрируется на Фиг.8. В этом способе местоположение касания может быть более точно определено вдоль строки 800 и/или длины колонки 802. В изображенном варианте осуществления каждая строка 800 и каждая колонка 802 имеют два соединения на землю, но должно быть понятно, что каждая строка и/или каждая колонка может иметь любое подходящее количество соединений на землю. Использование меньшего количества элементов датчика между электропитанием и землей может обеспечить более точное определение местоположения касания для заданного размера датчика. В других вариантах осуществления каждый "пиксель" датчика может содержать индивидуальную схему емкости со своим собственным соединением с электропитанием и землей.
[0052] Ссылаясь кратко опять на Фиг.5, емкостные элементы 510 датчика могут иметь любой подходящий интервал. Например, в некоторых вариантах осуществления элементы 510 датчика имеют интервал приблизительно 1-5 миллиметров между центрами смежных элементов датчика. Элементы датчика этого размера являются достаточно малыми, чтобы палец, касающийся датчика касания, был в зоне по меньшей мере двух элементов датчика, поскольку указательный палец взрослого человека имеет область касания приблизительно 10 мм в диаметре при касании датчика касания. С таким датчиком очевидно, что полезное разрешение может быть более мелким, чем размер датчика, поскольку более точная позиция может быть интерполирована, когда палец охватывает множественные элементы датчика. В других вариантах осуществления элементы датчика могут иметь более мелкий интервал, чем 5 мм. Однако это может увеличить стоимость датчика касания, поскольку количество строк и колонок может увеличиться. Аналогично, в некоторых вариантах осуществления элементы датчика могут иметь больший интервал, чем 5 мм. Однако в этом случае датчики могут быть достаточно большими, чтобы палец мог коснуться единственного элемента датчика, что может затруднить определить позицию пальца, и поэтому может привести к ухудшению разрешения датчика.
[0053] Любой подходящий размер датчика и количество элементов 510 датчика могут использоваться. Например, в некоторых вариантах осуществления может использоваться область датчика приблизительно 100 мм × 50 мм. В варианте осуществления согласно Фиг.6 такой датчик, имеющий m×n строк, может иметь количество колонок и строк, равное m+n, и m+n измерений емкости приводит к полному считыванию датчика. Однако в этом варианте осуществления, если пользователь касается множественных строк и/или множественных колонок одновременно, некоторая двусмысленность может существовать о местоположении касания. Например, если пользователь касается строк A и B и колонок 2 и 3, то может быть трудно определить, касается ли пользователь в позиции (A, 2) и (B, 3) или в позициях (A, 3) и (B, 2). Как описано в контексте Фиг.8, эта двусмысленность может быть преодолена до некоторой степени при помощи множественных соединений на землю в каждой строке и/или каждой колонке элементов датчика.
[0054] Напротив, и ссылаясь снова на Фиг.7, если касаются емкости от одного элемента датчика к другому элементу датчика, то m×n измерений может быть сделано, поскольку емкость может быть измерена от каждой строки к каждой колонке. В этом случае возможно разрешить (определить) каждое местоположение касания независимо, где касание происходит по множественным колонкам и/или множественным строкам.
[0055] Использование варианта осуществления с m×n измерениями может предложить преимущества перед использованием варианта осуществления с m+n измерениями в некоторых ситуациях. Например, вероятны множественные случайные касания, когда пользователь захватывает компьютерную мышь во время использования. Из-за двусмысленностей определения точного местоположения ввода касанием со способом m+n, описанным выше, эвристика для отказа от таких излишних контактов может быть более трудной для разработки для m+n способа по сравнению с m×n способом, поскольку m×n может принять решение о емкости в каждом элементе датчика независимо.
[0056] С другой стороны, m+n способ может предложить другие преимущества, так как он потенциально может быть реализован с более низкой стоимостью и мощностью. Чтобы улучшить способность однозначно определять местонахождение контактов в m+n способе, может использоваться вариант осуществления согласно Фиг.8. Этот вариант осуществления может позволить выполнить измерение двух независимых точек касания, пока одно было к одной стороне разделения в строке или колонке и другое было к другой стороне.
[0057] В других вариантах осуществления датчик может использовать как m+n, так и m×n способы обнаружения. Например, m×n измерение, предлагая больше деталей, также может потреблять больше мощности устройства из-за большего количества сделанных измерений. Поэтому, датчик может быть считан, используя m+n способ обнаружения, пока изменение в состоянии касания не будет обнаружено. Затем m×n измерение может быть выполнено, чтобы собрать больше подробной информации об измененном состоянии касания, прежде чем возобновить m+n измерения. Это описано более подробно ниже в контексте Фиг.24.
[0058] Датчик 410 касания может быть сконструирован любым подходящим способом и из любых подходящих материалов. Например, обычные емкостные датчики касания для чувствительных к касанию устройств отображения могут быть сделаны из прозрачного проводника, такого как оксид индия и олова (ITO), осажденного на изолирующую стеклянную или пластиковую подложку. Такой датчик может быть сформирован, например, посредством формирования строк на лицевой поверхности подложки и колонок на обратной поверхности подложки (или наоборот) или из единственного слоя ITO, который содержит и колонки и строки, с металлическими или ITO перемычками.
[0059] Однако в случае чувствительной к касанию компьютерной мыши или другой такой среды использования для датчика касания, датчик может быть непрозрачным. Дополнительно, датчик касания для компьютерной мыши имеет искривленную поверхность в противоположность датчику касания, используемому для чувствительного к касанию дисплея. Поэтому, емкостный датчик касания для компьютерной мыши может быть изготовлен посредством других процессов. Например, в одном варианте осуществления искривленный емкостный датчик касания может быть сделан посредством печати (например, растровой печати, струйной печати или другого подходящего метода печати) колонок и строк датчика касания на гибкой изолирующей подложке, используя проводящие чернила. В качестве более конкретного примера, серебряная полимерная толстая пленка может быть выполнена посредством печати на подложке из полиэфира. Должно быть понятно, что этот пример представлен с целью иллюстрации и не предназначен, чтобы быть ограничивающим каким-либо образом.
[0060] Фиг.9 иллюстрирует вариант осуществления способа 900 для формирования объекта с искривленным геометрическим элементом, имеющим емкостной датчик множественных касаний. В то время как показано в контексте компьютерной мыши, должно быть понятно, что эти концепции могут быть применены к любому другому подходящему искривленному объекту. Во-первых, способ 90 содержит на этапе 902 формирование первого набора элементов датчика на первой стороне гибкой изолирующей подложки. Как обозначено на этапе 904, в еще одном конкретном варианте осуществления первый набор элементов датчика может быть сформирован посредством печати проводящих чернил на гибкую подложку в качестве толстой пленки. Дорожки контактов могут быть сформированы таким же способом. Затем способ 900 содержит на этапе 906 формирование второго набора элементов датчика на второй стороне подложки. Как обозначено на этапе 908, в еще одном конкретном варианте осуществления второй набор элементов датчика может быть сформирован посредством печати проводящих чернил на второй стороне подложки, таким образом формируя датчик. Дорожки контактов могут снова быть сформированы таким же способом. Затем датчик может быть согнут по искривленной поверхности мыши, как обозначено на этапе 910, и затем прикреплен к поверхности мыши (например, с помощью адгезива или другого подходящего механизма), как обозначено на этапе 912, чтобы сформировать чувствительную к касанию компьютерную мышь. Должно быть понятно, что любые электрические подключения датчика к электропитанию, контроллеру и т.д. могут быть сделаны любым подходящим способом. Например, основание может включать в себя гибкий "шлейф", на котором напечатаны дорожки и который может быть введен внутрь для соединения с другой схемой.
[0061] Фиг.10 показывает другой вариант осуществления способа для формирования компьютерной мыши с емкостным датчиком множественных касаний. Способ 10 содержит на этапе 1002 формирование первого набора элементов датчика (и дорожек) на первой стороне подложки, например, посредством печати и затем на этапе 1004 формирование диэлектрического слоя над первым набором элементов датчика. Затем способ 1000 содержит на этапе 1006 формирование второго набора элементов датчика (и дорожек) поверх диэлектрического слоя, чтобы сформировать датчик. Затем на этапе 1008 способ 1000 содержит сгибание датчика по поверхности мыши и затем крепление датчика к поверхности мыши, чтобы сформировать чувствительную к касанию компьютерную мышь.
[0062] Фиг.11 показывает другой вариант осуществления способа 1100 формирования датчика множественных касаний для компьютерной мыши. Сначала на этапе 1102 первый и второй наборы элементов датчика печатают в единственном слое, в котором соединители сформированы для первого набора датчиков. Затем на этапе 1104 изоляционный материал осаждают в областях, где будут сформированы перемычки, то есть поверх соединителей для первого набора датчиков. Затем на этапе 1106 проводящие перемычки осаждают поверх изоляционного материала, чтобы сформировать соединители для второго набора датчиков, чтобы получить датчик. Этот процесс иллюстрируется на Фиг.21, описанной ниже. Датчик затем может быть прикреплен к компьютерной мыши, как описано выше. Должно быть понятно, что эти варианты осуществления представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом.
[0063] Любая подходящая подложка может использоваться как подложка для печати проводящих чернил. Один пример подходящей подложки содержит лист полиэфира, имеющий толщину приблизительно 0,003 дюйма. В других вариантах осуществления подложка может быть сделана из любого другого подходящего гибкого изоляционного материала и может иметь любую другую подходящую толщину. Аналогично, проводящие чернила могут иметь любую подходящую толщину. В одном конкретном варианте осуществления проводящие чернила, формирующие каждый элемент датчика, имеют толщину приблизительно 0,001 дюйма. В других вариантах осуществления проводящие чернила могут иметь любую другую подходящую толщину.
[0064] Электрические свойства толстых пленок полимерных проводящих чернил в таких датчиках могут иметь более низкое поверхностное сопротивление, чем таковое у ITO на стекле. Например, толстая пленка серебряных чернил имеет более низкое поверхностное сопротивление (~40 миллиом для серебряных проводящих чернил против десятков или сотен ом для ITO). Это может уменьшить RC-задержку вдоль колонок и строк датчика, и поэтому может разрешить более быстрые измерения на более длинных дорожках с меньшей ошибкой. Дополнительно, в некоторых вариантах осуществления углеродистые проводящие чернила могут использоваться вместо серебряных чернил. Углеродистые чернила могут быть менее дорогими, чем серебряные чернила, и также могут иметь подходящее низкое сопротивление.
[0065] Способы, показанные на Фиг.9-11, являются подходящими для формирования датчика множественных касаний для "развертываемой (в плоскость) поверхности" мыши или другого объекта. Термин "развертываемая поверхность", как используется в настоящем описании, относится к поверхности, которая может быть разглажена на плоскости без искажения (например, сжатия и/или растяжения). Фиг.12 показывает вариант осуществления примера компьютерной мыши 1200 с такой развертываемой поверхностью. В частности, развертываемая поверхность простирается от левого края компьютерной мыши (относительно ориентации компьютерной мыши на Фиг.12), вдоль длинной оси мыши к местоположению (обозначенному пунктирной линией 1202), где мышь начинает изгибаться в направлении вниз к правому нижнему краю. Датчик касания, наложенный на эту часть мыши 1200, находится в местоположении, которой касаются пальцы пользователя во время обычного использования, и поэтому может обнаружить жесты касания, сделанные пальцами пользователя.
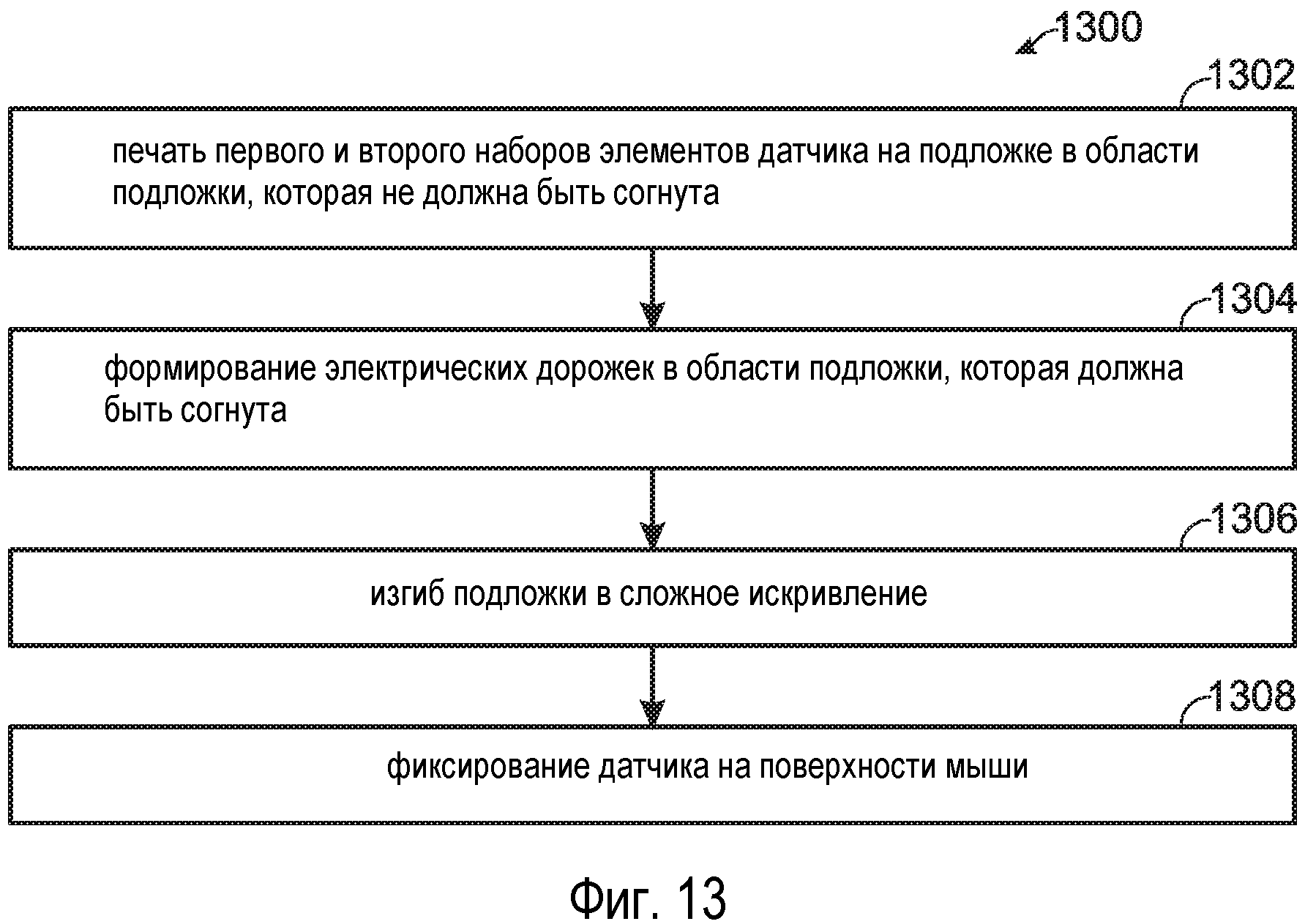
[0066] В других вариантах осуществления компьютерная мышь может содержать датчик касания, расположенный на неразвертываемой поверхности со сложной кривизной. Фиг.13 показывает вариант осуществления способа 1300 для формирования компьютерной мыши с датчиком множественных касаний для использования на неразвертываемой поверхности, в котором способ содержит изгибание датчика перед наложением на неразвертываемую поверхность. Способ 1300 содержит на этапе 1302 формирование первого и второго наборов элементов датчика на подложке в области подложки, которая не должна быть согнута. Первый и второй наборы элементов датчика могут быть сформированы, как описано в любом из способов 900-1100 выше, или любым другим подходящим способом.
[0067] Затем способ 1300 может содержать на этапе 1304 формирование электрических дорожек в области подложки, которая должна быть согнута. Такие дорожки могут быть сформированы, например, чтобы соединить элементы датчика, которые пространственно отделены областью подложки, которая должна быть согнута. Способ 1300 затем содержит на этапе 1306 изгибание подложки в форму, которая соответствует сложной кривизне поверхности мыши, на которую она должна быть наложена, и затем на этапе 1308 фиксацию датчика к поверхности мыши. В этом способе подложка, которая является первоначально плоской во время изготовления, может быть сформирована, чтобы соответствовать неразвертываемой поверхности. Датчик может быть затем соединен с электронными средствами на печатной плате, расположенными в мыши, через гибкий "шлейф", который также напечатан, используя проводящие полимерные толстопленочные чернила, на гибкой пластиковой подложке. Такой шлейф может быть соединен с печатной платой, используя ZIF или другой гибкий соединитель, или просто посредством прижима его к контактам на плате.
[0068] Должно быть понятно, что в дополнение к изгибанию подложки подложка также может быть отрезана, чтобы позволить ей быть изогнутой или иначе сформированной на неразвертываемой поверхности. Однако в небольшом количестве сред использования изгибание может быть более практичным, чем отрезание, поскольку электрическая связность может быть поддержана в изогнутой области по сравнению с отрезанной областью. Аналогично, должно быть понятно, что полимерные толстопленочные чернила могут рассматриваться для острой складки без отслаивания или в ином случае будут не в состоянии поддерживать контакт через сгиб.
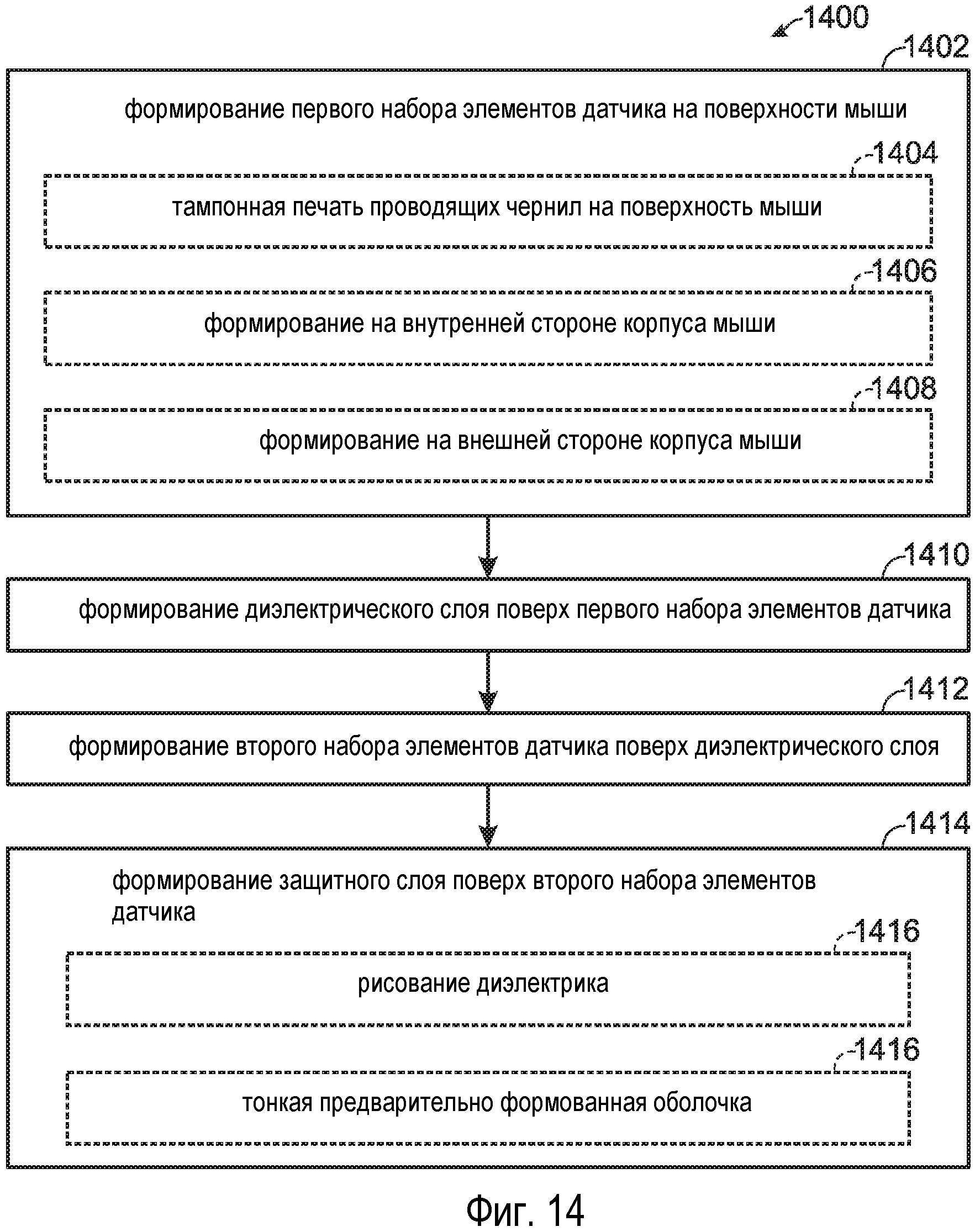
[0069] Фиг.14 показывает другой вариант осуществления способа 1400 для формирования компьютерной мыши с емкостным датчиком множественных касаний, расположенным на неразвертываемой поверхности компьютерной мыши. Способ 144 содержит на этапе 1402 формирование первого набора элементов датчика непосредственно на поверхности компьютерной мыши. Первый набор элементов датчика может быть сформирован, например, тампонной печатью проводящих чернил на поверхность компьютерной мыши, как обозначено на этапе 1404. Тампонная печать является процессом, в котором рисунок сначала печатают на гибкую прокладку и затем гибкую прокладку прижимают к другой поверхности, чтобы перенести рисунок на эту поверхность. В некоторых вариантах осуществления проводящие чернила могут быть напечатаны на внутренней поверхности корпуса мыши, как обозначено на этапе 1406, в то время как в других вариантах осуществления проводящие чернила могут быть напечатаны на внешней поверхности корпуса мыши, как обозначено на этапе 1408. Когда проводящие чернила напечатаны на внутренней поверхности корпуса мыши, корпус мыши может быть достаточно тонким (например, приблизительно 0,5 мм), чтобы обнаружить с помощью датчика эффект касания пальцем корпуса мыши.
[0070] Продолжая со ссылками на Фиг.14, способ 1400 затем содержит на этапе 1410 формирование диэлектрического слоя над первым набором элементов датчика и затем на этапе 1412 формирование второго набора элементов датчика над первым набором элементов датчика. В других вариантах осуществления первый и второй наборы элементов датчика могут быть сформированы на внутренней поверхности и внешней поверхности корпуса мыши, соответственно.
[0071] Сила может дополнительно и/или альтернативно быть измерена посредством использования пьезорезистивных чернил. Например, слой пьезорезистивных чернил может быть вставлен между строками и колонками датчика, которые созданы на различных подложках. В такой компоновке ток может тогда течь по нормали к плоскости датчика. В качестве другого примера, слой пьезорезистивных чернил может быть наложен на верх датчика, когда строки и колонки датчика созданы на одной и той же подложке (с перемычками, чтобы соединить строки и колонки в матрице). В такой компоновке ток может течь в плоскости датчика. Импеданс между строкой и колонкой ожидается, является параллельной комбинацией сопротивления и емкости. Выполняя измерения на двух отдельных частотах, емкость и сопротивление могут быть измерены независимо. Это описано более подробно ниже в контексте Фиг.21-23.
[0072] Затем способ 1400 содержит на этапе 1414 формирование защитного слоя над вторым набором элементов датчика. Такой защитный слой может быть сформирован, например, накладывая диэлектрическую краску над вторым набором элементов датчика, как обозначено на этапе 1416, накладывая тонкую предварительно сформованную оболочку поверх второго набора элементов датчика, как обозначено на этапе 1418, или любым другим подходящим процессом. В этом способе емкостной датчик множественных касаний может быть сформирован непосредственно на корпусе мыши, вместо подложки, которая затем фиксируется к корпусу мыши. Межсоединения для такого варианта осуществления могут быть сформированы любым подходящим способом. Один пример подходящего способа формирования межсоединений на этом датчике может содержать использование соответствующего материала с анизотропной проводимостью, подобного материалу «полосы зебры», используемому на некоторых жидкокристаллических дисплеях, чтобы сформировать межсоединения.
[0073] Фиг.15 показывает другой вариант осуществления способа 1500 для формирования емкостного датчика множественных касаний на неразвертываемой поверхности компьютерной мыши посредством так называемого процесса "декорирование в форме". Способ 1500 содержит на этапе 1502 формирование "фольги" и затем на этапе 1504 печать первого и второго наборов элементов датчика на фольге. Фольга является вставкой, которая должна быть помещена в форму во время процесса формования корпуса мыши таким образом, чтобы рисунок, напечатанный на фольге, переносился на сформованное изделие во время формования. Таким образом, способ 1500 затем содержит на этапе 1506 вставку фольги с первым и вторым наборами элементов датчика, напечатанными на ней, в форму и на этапе 1508 формование корпуса мыши в форме, таким образом перенося рисунок к корпусу мыши. Фольга может быть или может не быть включена в формованное изделие во время формования. Электрические дорожки могут быть сформированы на корпусе мыши во время процесса формования таким же образом.
[0074] В некоторых вариантах осуществления проводящий материал, напечатанный на поверхности мыши, может быть материалом, который сублимирует. В таких вариантах осуществления совокупность датчиков может быть сублимирована в объемный материал корпуса мыши, таким образом встраивая совокупность датчиков непосредственно в корпус мыши.
[0075] Датчики, описанные выше в контексте способов 900, 1000, 1100, 1300, 1400 и 1500, конфигурируются, чтобы воспринимать емкость. Это позволяет датчику обнаруживать, находится ли человеческий палец в непосредственной близости к заданной точке на датчике, но непосредственно не обнаруживает силу, с которой нажимает этот палец. Как описано более подробно ниже, эта сила может быть измерена косвенно, измеряя область участка контакта ввода касанием. Эта область будет увеличиваться, когда палец нажимает с большей силой, из-за уплощения ткани пальца. В некоторых вариантах осуществления измерение силы может быть получено посредством покрытия датчика преобразователем, который преобразует силу в электрическую емкость. Примером такого преобразователя является материал с диэлектрической постоянной, которая чувствительна к давлению, например жидкокристаллический материал. Должно быть понятно, что этот пример датчика давления представлен с целью примера и не предназначен, чтобы быть ограничивающим каким-либо образом.
[0076] Как упомянуто выше, мышь с чувствительной к касанию поверхностью может содержать один или более источников света, которые могут быть выборочно освещены, чтобы обозначить границы областей чувствительной к касанию поверхности, которые отображены на конкретные функции. Например, Фиг.16 показывает вариант осуществления компьютерной мыши 1600, которая содержит область 1602, отображенную на функцию в качестве колесика прокрутки. Пользователь может пролистывать список, например, посредством щелчка или протаскивания пальца вперед и назад относительно длинной оси компьютерной мыши 1600 вдоль области 1602.
[0077] Однако, так как компьютерная мышь 1600 может иметь гладкую, без характерных черт поверхность, которая иначе не указывает эти функциональные возможности, когда она активна, компьютерная мышь 1600 может содержать один или более источников света, которые могут быть освещены, чтобы очертить область 1602, когда эта область отображена на функцию колесика прокрутки. В изображенном варианте осуществления граница 1604 области 1602 освещена, но должно быть понятно, что в других вариантах осуществления область может быть обозначена любым другим подходящим способом. Например, в других вариантах осуществления вся область 1602 (а не только периметр области) может быть освещена. В то время как показано в контексте области, отображенной на функциональные возможности колесика прокрутки, должно быть понятно, что любая подходящая область компьютерной мыши 1600, отображенная на любые конкретные функциональные возможности, может быть указана посредством источника света аналогичным образом.
[0078] Любой подходящий тип источника света может использоваться, чтобы осветить область 1602. Например, в некоторых вариантах осуществления один или более световодов (то есть проводников света с полным внутренним отражением) может использоваться, чтобы транспортировать свет от светодиода или другого светоизлучателя в мыши на поверхность мыши в местоположении выше датчика касания. В других вариантах осуществления источники света могут содержать электрофоретические чернила. В других вариантах осуществления источник света может быть сконфигурирован, чтобы испускать свет из-под датчика касания. В таких вариантах осуществления датчик касания может использовать прозрачный проводник, такой как ITO, который позволяет свету проходить через датчик, в противоположность полимерной толстой пленке проводящих чернил. Альтернативно, датчик касания может быть изготовлен, чтобы оставить области, через которые свет проходит, свободными от любых дорожек или элементов датчика, чтобы позволить свету проходить через датчик.
[0079] Конкретные функциональные возможности могут быть указаны любым другим подходящим способом, чем тот, который показан на Фиг.16. Например, в некоторых вариантах осуществления тонкое пластмассовое пристегивающееся покрытие может быть обеспечено, которое содержит разграничения в конкретных местоположениях, которые отображены на конкретные функциональные возможности. Фиг.17 показывает пример такого покрытия мыши 1700, где расположенное в центре разграничение 1702 в покрытии 1700 соответствует области мыши, отображенной на функции колесика прокрутки. Покрытие 1700 мыши может содержать код, который считывается мышью, чтобы позволить мыши идентифицировать покрытие и искать заранее заданное отображение датчика касания для этого покрытия. Такое покрытие может поставляться, например, с игрой или другим программным обеспечением, чтобы автоматически отобразить датчик касания на функции игры или другого программного обеспечения. В одном варианте осуществления код содержит один или более проводящих элементов 1704, которые считываются датчиком касания мыши. В других вариантах осуществления код может содержать оптически считываемый код (например, штриховой код), который считывается оптическим детектором в мыши, или любой другой подходящий тип кода.
[0080] Очевидно, что любая другая подходящая функция или функции могут быть отображены на конкретные области на датчике касания мыши. Например, как описано выше, правая сторона датчика касания компьютерной мыши может быть отображена на функциональные возможности "щелчка правой клавишей", и левая сторона может быть отображена на функциональные возможности "щелчка левой клавишей". Дополнительно, функция двумерного панорамирования может быть отображена на квадратную область датчика касания для использования во время навигации в приложениях электронных таблиц. Дополнительно, функция "очистка" может быть отображена на кольцевую область датчика касания для перемещения по оси времени в приложении редактирования видео. Должно быть понятно, что эти конкретные функциональные возможности представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом.
[0081] Поскольку ассоциация между областью и функцией может быть изменена произвольно в программном обеспечении, отображение конкретных областей датчика касания может быть приспособлено к пользовательскому предпочтению или текущей задаче. Например, пользователи-новички вычислительных устройств могут быть смущены потенциально большим количеством кнопок на обычной мыши. Поэтому, для такого пользователя мышь с единственным механическим исполнительным механизмом (таким образом, что весь корпус мыши действует как механическая кнопка), а также датчик касания могут первоначально действовать как простая однокнопочная мышь, которая предоставляет функциональные возможности, когда комфорт пользователя и опыт увеличиваются.
[0082] В такой мыши с единственным механическим исполнительным механизмом намерение для механического исполнительного механизма выполнить конкретную функцию может быть определено вводом касания, ассоциированным с механическим активированием. Например, намерения вызвать функциональные возможности "щелчок левой клавишей" и "щелчок правой клавишей" посредством единственного механического исполнительного механизма можно отличить посредством изменений во вводах касанием на соответствующих правой и левой сторонах датчика касания.
[0083] Фиг.18 показывает вариант осуществления способа 1800 различения намерений щелчка левой и правой клавишами посредством ввода датчиком касания. Сначала на этапе 1802 способ 1800 содержит обнаружение приведения в действие механического исполнительного механизма. Затем на этапе 1804 способ 1800 содержит обнаружение увеличения области касания пальца на мыши. Такое увеличение может быть вызвано, например, пальцем, начинающим касание на корпусе мыши, или ранее помещенным пальцем, увеличивающим давление на корпус мыши. Когда пользователь увеличивает величину давления, с которым пользователь надавливает на мышь пальцем, область касания этого пальца на датчике касания может увеличиться. Фиг.19 и 20 иллюстрируют эту концепцию. Сначала, ссылаясь на Фиг.19, касание на левой стороне датчика касания мыши показано в выходном сигнале датчика касания как 1900 и касание на правой стороне датчика касания показано как 1902. Затем, ссылаясь на Фиг.20, если пользователь намеревается сделать ввод "щелчком правой клавишей", пользователь может оказать больше давления правым пальцем, чтобы вызвать активирование механического исполнительного механизма. В этом случае область контакта касания 1902 правой стороны увеличивается.
[0084] Продолжая со ссылками на Фиг.18, способ 1800 затем содержит на этапе 1806 обнаружение местоположения пальца, соответствующего увеличению области касания на корпусе мыши, с помощью местоположения на датчике касания и затем на этапе 1808 определение, был ли этот палец расположен на области корпуса мыши, ассоциированной с конкретной функцией. Если это касание не происходит в области корпуса мыши, ассоциированной с конкретной функцией, то способ 1800 содержит на этапе 1810 назначение механическому исполнительному механизму функциональных возможностей по умолчанию. С другой стороны, если касание произошло в области корпуса мыши, ассоциированной с конкретно отображенными функциональными возможностями, то способ 1800 содержит на этапе 1812 назначение механическому исполнительному механизму функциональных возможностей, отображенных на эту область.
[0085] Как упомянуто выше, некоторые варианты осуществления могут содержать датчик давления, сконфигурированный, чтобы обнаружить давление ввода касанием на поверхности мыши. Такое восприятие давления касания может позволить контроллеру компьютерной мыши обнаруживать сигналы давления, которые соответствуют активации "щелчка левой клавишей", "щелчка правой клавишей" и другим таким действиям "виртуальной кнопки", которые приводятся в действие механическими кнопками на некоторых мышах. Дополнительно, восприятие давления касания также может использоваться, чтобы отличить различные действия, такие как движение активации "колесика прокрутки" на поверхности мыши, от идентичных касаний на поверхность мыши, игнорируя такие вводы, когда вводы касанием не удовлетворяют заранее определенному порогу давления. Должно быть понятно, что эти примеры использования для датчиков давления в чувствительной к касанию мыши представлены с целью примера и не предназначены, чтобы быть ограничивающими каким-либо образом.
[0086] Любой подходящий датчик давления или компоновка датчиков давления могут использоваться в мыши совместно с емкостным датчиком множественных касаний. Например, в некоторых вариантах осуществления мышь с емкостным датчиком касания может содержать два датчика давления: один, расположенный в позиции, конфигурируемой, чтобы обнаружить ввод "щелчком левой клавишей" (то есть местоположении, в котором левая кнопка мыши обычно находится на механических мышах), и один, расположенный в позиции, конфигурируемой, чтобы обнаружить ввод "щелчком правой клавишей".
[0087] В других вариантах осуществления датчик давления может быть сконфигурирован, чтобы иметь более мелкое разрешение таким образом, что давление может быть воспринято на основе "пиксель за пикселем". Любой подходящий датчик давления может использоваться, чтобы определить давление касания на пиксельной основе. Например, в некоторых вариантах осуществления пьезорезистивный лист (то есть лист, содержащий слой пьезорезистивных чернил) может использоваться совместно с совокупностью датчиков, чтобы обнаружить давление касания. Такой пьезорезистивный лист является листом гибкого материала, который содержит дисперсию малых проводящих элементов. Когда давление прилагается к листу, компоновка проводящих элементов изменяется. Это заставляет сопротивление листа изменяться в области, на которую оказывают давление. Помещая пьезорезистивный лист против совокупности датчиков, содержащей электроды с различными потенциалами, сопротивление пьезорезистивного листа может быть измерено между элементами датчика, чтобы обнаружить величину давления, приложенного к листу. Должно быть понятно, что другие чувствительные к давлению материалы с переменным сопротивлением могут использоваться подобным образом.
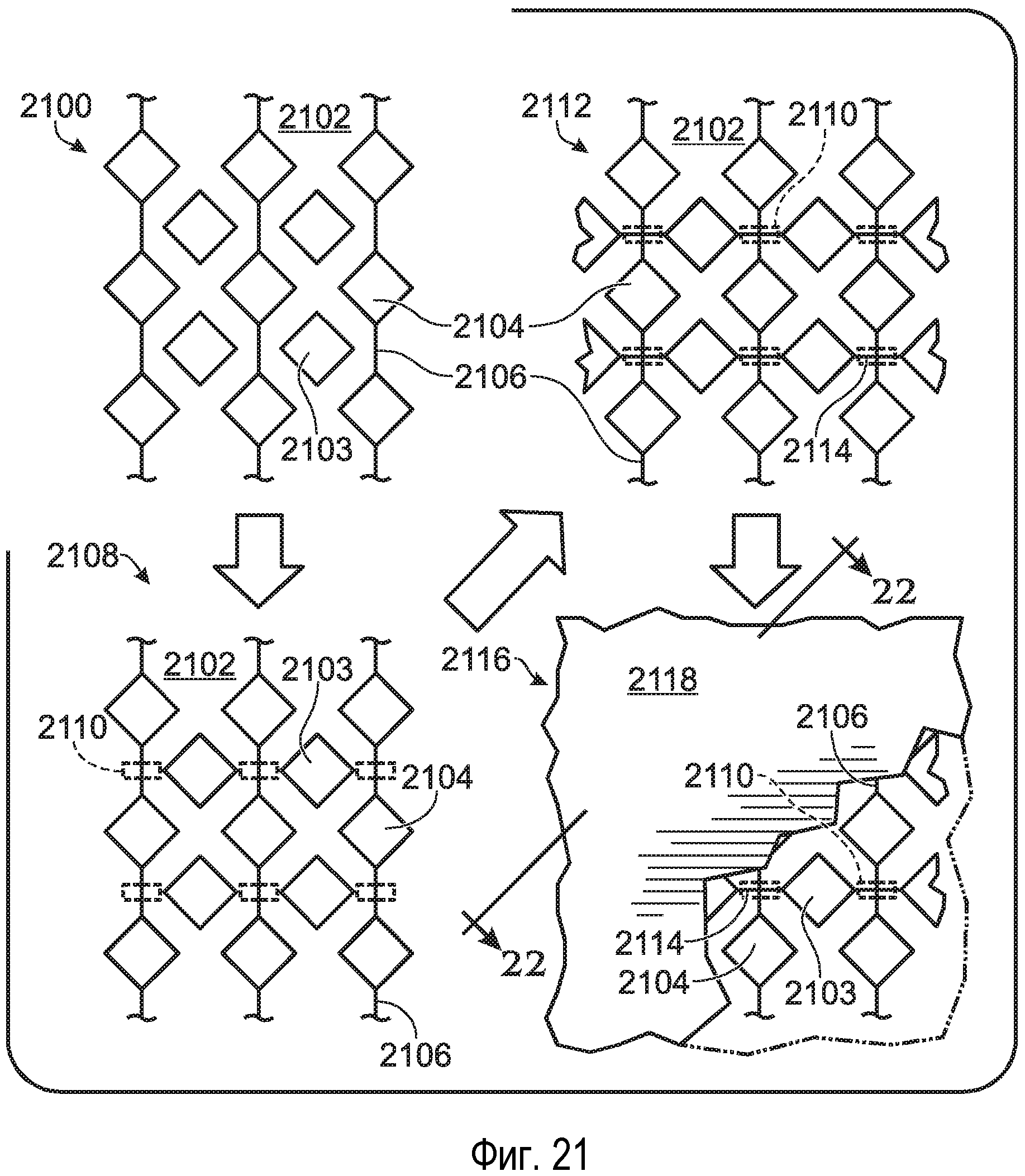
[0088] В некоторых вариантах осуществления отдельные совокупности датчиков могут использоваться для емкостного датчика касания и резистивного датчика давления. Например, резистивный датчик давления, содержащий пьезорезистивный лист и совокупность датчиков, может быть помещен над или под емкостным датчиком касания, имеющим отдельную совокупность датчиков. В других вариантах осуществления емкостный датчик касания и резистивный датчик давления могут совместно использовать общую совокупность датчиков. Фиг.21 и 22 иллюстрируют конструкцию емкостного датчика множественных касаний и резистивного датчика давления, которые совместно используют общее множество электродов. Сначала ссылаясь на Фиг.21, совокупность датчиков формируется 2100 посредством печати полимерной толстой проводящей пленки на подложке 2102 в совокупности элементов 2103 датчика строки и элементов 2104 датчика колонки. Как изображено посредством 2100, соединители 2106 первоначально наносят печатью в одном направлении (изображено как направление колонки). Затем, как показано 2108, диэлектрический материал 2110 осаждают поверх соединителей 2106 колонки, и затем, как указано посредством 2112, соединители 2114 строки наносят печатью поверх диэлектрического материала, чтобы закончить совокупность датчиков. Наконец, как указано посредством 2116, пьезорезистивный лист 2118 накладывают поверх датчика. Пьезорезистивный лист 2118 показан в частично разобранном виде на Фиг.21, чтобы проиллюстрировать нижележащую структуру.
[0089] Как показано на Фиг.22, пьезорезистивный лист соединяет смежные элементы 2103 датчика строки и элементы 2104 датчика колонки с резистивной дорожкой, иллюстрированной схематично как 2200. Емкостное соединение смежных элементов датчика (в m×n компоновке) иллюстрируется схематично как 2202. Как таковой, каждый элемент датчика подсоединен и резистивно и емкостным образом к соседним элементам датчика. Поэтому значения сопротивления и емкости могут быть вычислены из измерений импеданса, проведенных на различных частотах. В этом способе местоположение касания и измерения давления касания могут быть сделаны при одном том же разрешении.
[0090] Соответственно, Фиг.23 показывает вариант осуществления способа 2300 для измерения местоположения касания и давление касания с помощью датчика касания, который содержит емкостный датчик множественных касаний и резистивный датчик давления, которые используют одну совокупность датчиков, например, в варианте осуществления согласно Фиг.21-22. Способ 2300 содержит на этапе 2302 получение первого измерения импеданса и затем на этапе 2304 получение второго измерения импеданса на другой частоте. Должно быть понятно, что термин "измерение импеданса" в этом контексте содержит полное считывание датчика, то есть измерение импеданса для каждого пикселя совокупности датчиков.
[0091] Затем на этапе 2306 значения сопротивления и емкости определяют на основании этих двух сделанных измерений. В некоторых вариантах осуществления, как обозначено на этапе 2308, два значения могут быть определены из величины полных измеренных импедансов. Вклады емкостного реактивного сопротивления и сопротивления в величину полного измеренного импеданса заданы следующим уравнением, где |Z| является величиной полного измеренного импеданса и Xc - емкостное реактивное сопротивление:
[0092]  , где
, где
[0093] 
[0094] Два измерения импеданса могут быть сделаны в достаточно близком временном интервале, чтобы разрешить предположение, что резистивный компонент полного импеданса является постоянным в обоих случаях, так же как емкость C (то есть давление и местоположение пальца не изменялись по существу во время измерения). При этих предположениях изменение в полном импедансе является функцией частот, при которых были сделаны эти два измерения. Таким образом C и R могут быть определены из этих двух измерений.
[0095] В других вариантах осуществления, как показано посредством 1210, реактивная емкость и сопротивление могут быть определены из угловой разности фаз между двумя измеренными импедансами. В этих вариантах осуществления следующее отношение может использоваться, чтобы определить сопротивление и емкостное реактивное сопротивление:
[0096] 
[0097] Снова предполагая, что эти два измерения сделаны во время достаточно короткого временного интервала, чтобы предположить, что R (то есть давление касания) и C (то есть местоположение касания) являются постоянными, измеренный сдвиг фазы является функцией реактивной емкости, и поэтому частот, на которых были сделаны измерения. Таким образом, R и C могут быть определены из сдвига фаз.
[0098] Продолжая со ссылкой на Фиг.23, способ 2300 также содержит на этапе 2312 обнаружение ввода касанием из определенного емкостного реактивного сопротивления, и, в ответ, управление графическим пользовательским интерфейсом в соответствии с вводом касания. Например, если обнаруженный ввод касанием соответствует сделанному жесту "движение двумя пальцами в разные стороны" или "растяжению", в то время как управляемый мышью курсор расположен над фотографическим объектом, отображенным на графическом пользовательском интерфейсе, размер объекта фотографии может быть изменен в ответ на обнаруженный ввод касанием.
[0099] Аналогично, способ 2300 содержит на этапе 2314 обнаружение давления касания из определенного сопротивления и, в ответ, управление графическим пользовательским интерфейсом в соответствии с давлением. Например, если обнаруженное давление касания расположено в пределах левого переднего квадранта корпуса мыши и превышает заранее определенный пороговый уровень давления, то этот конкретный ввод касанием рассматривается как являющийся вводом "щелчком левой клавишей". Таким образом, действие пользовательского интерфейса может быть предпринято в ответ. В качестве более конкретного примера, когда курсор мыши расположен над иконкой, обнаружение ввода "щелчком левой клавишей" может вызвать открытие файла, представленного иконкой, и показ на пользовательском интерфейсе.
[00100] В небольшом количестве сред использования может быть желательно обнаружить события «почти касания» над корпусом мыши, а также касания корпуса мыши, поскольку обнаружение состояния "почти касания" может разрешить дополнительные функциональные возможности. С вариантом осуществления совокупности датчиков, описанным в настоящем описании, в котором эта совокупность содержит мозаичную сеть элементов датчика в колонках и строках ромбовидной формы, m+n измерение емкости может предложить большую чувствительность к почти касаниям, чем m×n измерение емкости. Это имеет место потому, что m+n измерение емкости измеряет емкость от элемента датчика на землю вместо измерения между краями смежных элементов датчика строки и колонки, как сделано в m×n измерении. Поэтому емкость каждого элемента датчика больше в m+n компоновке, чем в m×n компоновке, обеспечивая большую чувствительность для обнаружения «почти касаний».
[00101] Однако, как описано выше, m+n измерение предлагает более низкое разрешение, чем m×n измерение, и поэтому может привести к некоторой неопределенности относительно местоположения ввода касанием, особенно когда касание по меньшей мере частично не охватывает элемент датчика как строки, так и колонки. Поэтому Фиг.24 показывает блок-схему, изображающую вариант осуществления способа 2400 считывания емкостного датчика множественных касаний, который обеспечивает увеличенную чувствительность к почти касанию, предлагаемую m+n способом измерения, в то же время также обеспечивая более высокое разрешение m×n способа измерения. Способ 2400 содержит на этапе 2402 измерение m+n емкости и определение сигнала ввода касанием из этого измерения и затем на этапе 2404 сравнение сигнала ввода касанием с предыдущим сигналом ввода касанием, чтобы определить на этапе 2406, имело ли место какое-нибудь изменение между сигналами ввода касанием. Если никакое изменение не обнаружено, то способ 2400 возвращается к этапу 2402, где выполняют другое m+n измерение емкости.
[00102] С другой стороны, если определено на этапе 2406, что изменение в состоянии касания произошло между измерениями емкости (например, новое касание обнаружено, текущее касание перемещено или удалено, и т.д.), то способ 2400 переходит к этапу 2408, где берут m×n измерение и сигнал ввода касанием определяют из m+n измерения. Затем способ 2400 возвращается к этапу 2402 таким образом, что получают больше m+n измерений, до тех пор пока не будут снова обнаружены изменения в состоянии касания. В этом способе чувствительность к состояниям почти касания может быть увеличена исключительно относительно использования m×n измерения. Дополнительно, m+n измерения могут потреблять меньше мощности, чем m×n измерения. Поэтому способ 2400 также может помочь сэкономить мощность, и поэтому повысить срок службы батареи в устройствах, имеющих батарейное питание.
[00103] Фиг.25 показывает другой вариант осуществления способа 2500 создания объекта, такого как мышь, имеющей искривленный неразворачиваемый геометрический элемент, который содержит емкостную поверхность множественных касаний. Способ 2500 содержит на этапе 2502 формирование на подложке множества элементов датчика, определяющих множество пикселей датчика множественных касаний, и затем на этапе 2504 вакуумное формирование подложки в сформированную предварительную форму, которая соответствует поверхности искривленного геометрического элемента корпуса устройства ввода. При выборе подходящего материала подложки процесс вакуумного формирования позволяет сформовать подложку и напечатанную совокупность в сложную неразворачиваемую форму без использования каких-либо сгибов и/или отрезов в подложке, как описано выше. Примеры подходящих материалов подложки включают в себя, но не ограничиваются, поликарбонат, PET (полиэтилентерефталат) и ABS (акрилонитрилбутадиенстирол). Аналогично, датчик давления может быть включен способом, описанным выше, в котором подходящий выбор материала для поддержки пьезорезистивных чернил может позволить вакуумно сформовать структуру датчика давления наряду с датчиком касания. В некоторых вариантах осуществления формирование датчика давления может содержать помещение пьезорезистивного листа (например, пьезорезистивных чернил, поддерживаемых на подходящей подложке) в контакт с совокупностью элементов датчика способом, описанным выше, или до или после формования предварительной формы.
[00104] Затем после формирования предварительной формы способ 2500 далее содержит на этапе 2506 фиксирование предварительной формы к искривленному геометрическому элементу. В некоторых вариантах осуществления, как обозначено на этапе 2508, это может содержать помещение предварительной формы в форму (опоку), и затем введение пластичного материала в форму (опоку), чтобы сформовать предварительную форму в корпус устройства ввода. В других вариантах осуществления, как обозначено на этапе 2510, предварительная форма может быть фиксирована к корпусу устройства ввода после того, как корпус устройства ввода был создан. Этим способом совокупность датчиков может быть обеспечена на сложных неразворачиваемых поверхностях. Фиг.26 показывает пример мыши 2600 с совокупностью 2602 датчиков, сформированной на неразворачиваемой поверхности, имеющей сложную кривизну.
[00105] Должно быть понятно, что варианты осуществления, раскрытые в настоящем описании, могут использоваться с другими объектами, отличными от компьютерной мыши. Например, искривленный датчик касания также может использоваться с интерактивным шаром, искривленным дисплеем и/или другими такими искривленными поверхностями. Дополнительно, должно быть понятно, что варианты осуществления, раскрытые в настоящем описании, могут предоставить платформу изготовителю, чтобы разработать мыши с многочисленными различными функциональными возможностями с помощью одной конструкции. Например, когда различные кнопки и другие средства управления реализованы аппаратными средствами мыши, каждая новая конструкция мыши может использовать конструкцию и изготовление новых форм (опок) и другой набор инструментов для новой конструкции аппаратных средств. Напротив, включение датчика касания и/или датчика давления на корпус мыши позволяет отобразить новые функциональные возможности на конкретные области касания корпуса мыши, таким образом позволяя использовать одну конструкцию аппаратных средств, чтобы реализовать новые функциональные возможности.
[00106] Различные варианты осуществления компьютерных мышей, функциональных возможностей компьютерных мышей, способы изготовления компьютерных мышей, способы изготовления датчиков касания и другие искривленные чувствительные к касанию устройства раскрыты с целью примера и не предназначены, чтобы быть ограничивающими в каком-либо смысле, так как возможны многочисленные изменения. Конкретные процедуры и способы, описанные в настоящем описании, могут представить одну или более из любого количества стратегий обработки, такие как управляемые событием, управляемые прерыванием, многозадачное управление, многопоточная обработка и т.п. Также различные проиллюстрированные действия могут быть совершены в иллюстрированной последовательности параллельно или в некоторых случаях опущены. Аналогично, порядок любого из вышеописанных процессов не обязательно обязан достигать признаков и/или результатов вариантов осуществления, описанных в настоящем описании, но предоставлены для простоты иллюстрации и описания.
[00107] Предмет настоящего описания включает в себя все новые и неочевидные комбинации и подкомбинации различных процессов, систем и конфигураций и другие признаки, функции, действия и/или свойства, раскрытые в настоящем описании, а также любые и все его эквиваленты.
Архитектура для онлайновых коллективных и объединенных взаимодействий
Интеллектуальное редактирование реляционных моделей
Создание и развертывание распределенных расширяемых приложений
Использование устройства флэш-памяти для препятствования несанкционированному использованию программного обеспечения
Гибкое редактирование гетерогенных документов
Доверительная среда для обнаружения вредоносных программ
Интеграция рекламы и расширяемые темы для операционных систем
Перемещение сущностей, обладающих учетными записями, через границы безопасности без прерывания обслуживания
Криптографическое управление доступом к документам
Предоставление цифровых удостоверений
Архитектура для онлайновых коллективных и объединенных взаимодействий
Интеллектуальное редактирование реляционных моделей
Создание и развертывание распределенных расширяемых приложений
Использование устройства флэш-памяти для препятствования несанкционированному использованию программного обеспечения
Гибкое редактирование гетерогенных документов
Доверительная среда для обнаружения вредоносных программ
Интеграция рекламы и расширяемые темы для операционных систем
Перемещение сущностей, обладающих учетными записями, через границы безопасности без прерывания обслуживания
Криптографическое управление доступом к документам
Предоставление цифровых удостоверений

