СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано при построении различных радиолокационных систем, предназначенных для управления движением летательных аппаратов.
Для обеспечения навигации летательных аппаратов (ЛА) используют радиоволны, применяемые в радиолокационных системах навигации.
Известны радиолокационные системы навигации для определения угловой ориентации ЛА, использующие прием сигналов навигационных искусственных спутников земли (НИСЗ) в двух разнесенных точках, жестко связанных с ЛА [1].
Для угловой ориентации используют зондирующие (излучаемые) сигналы НИСЗ глобальных навигационных спутниковых систем и прием этих сигналов на две разнесенные антенны, расположенные параллельно одной или двум осям ЛА, измерение фазового сдвига между принятыми сигналами на разнесенные антенны от каждого НИСЗ и определение углового положения осей ЛА путем решения системы уравнений [1].
Недостатком способа [1] является низкая точность определения углов, связанная с тем, что антенны необходимо располагать на малом расстоянии (меньше длины волны принимаемых сигналов). Увеличение расстояния между антеннами снижает погрешность определения углов, однако появляется неоднозначность фазовых измерений, ведущая к неоднозначному определению углового положения ЛА. Для устранения последнего применяют сложную обработку сигналов с использованием ряда НИСЗ для исключения ложных результатов. При этом существенное значение имеет время определения угловой ориентации (время сходимости решения задачи), которое, например, для четырех НИСЗ составляет несколько минут.
С другой стороны, возможен сбой способа, когда происходит работа в сложной помеховой обстановке.
Известен способ навигации летательных аппаратов [2], выбранный за прототип.
Реализация способа [2] заключается в следующем.
Используют информацию эталонной карты местности, установленной на ЛА до начала движения, о навигационном поле земли. Эталонная карта представляет собой массив данных о рельефе местности и массив данных о типе подстилающей поверхности.
Выбирают необходимый участок местности эталонной карты, который представляет собой мерный участок и определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Используют базу данных об интегральных параметрах (ИП) эталонных отраженных сигналов, представляющую собой массив данных, элементы которого в цифровом виде хранят значения ИП эталонных отраженных импульсов с учетом типа подстилающей поверхности и диапазона углов, под которым может производиться измерение наклонных дальностей до подстилающей поверхности.
Составляют текущую карту с помощью многолучевых измерений с использованием трех лучей радиоволн, расположенных в одной плоскости, которая находится под углом к плоскости горизонта мерного участка.
Лучи радиоволн излучают последовательно в следующем порядке: первым - центральный луч (по направлению движения ЛА), вторым - левый луч и третьим - правый луч относительно центрального луча.
Измеряют наклонные дальности и интегральные параметры отраженных сигналов (измеренных сигналов) по каждому лучу.
Вычисляют по измеренным наклонным дальностям координаты точек измерений в системе координат, связанной с ЛА.
Определяют поправки к координатам местоположения ЛА по плановым координатам мерного участка и высоте.
Необходимо отметить, что наличие погрешностей измерений за счет угловых колебаний ЛА по тангажу приводит к дополнительной погрешности при определении поправок к координатам, для устранения которой выполняют следующие операции.
При последнем измерении запоминают интегральные параметры (ИП) измеренных отраженных сигналов по всем трем лучам.
Определяют на эталонной карте по определенным ранее точкам измерений в местной системе координат средний угол наклона поверхности и тип подстилающей поверхности для каждого из лучей при последнем измерении.
Используют базу данных об интегральных параметрах эталонных отраженных сигналов для трех лучей с учетом отклонения луча от вертикали и среднего угла наклона поверхности, а также типа подстилающей поверхности для каждого луча.
Определяют величину дополнительного угла отклонения от вертикали по тангажу каждого из лучей за счет погрешности измерения угловых колебаний ЛА по тангажу, используя интегральные параметры эталонных и измеренных отраженных сигналов по каждому лучу.
Уточняют поправки к координатам ЛА по плановым координатам и высоте на основе определения дополнительного угла отклонения от вертикали по тангажу каждого луча.
Выдают поправки к координатам местоположения ЛА в плановых координатах мерного участка по трем координатам.
Управляют движением ЛА путем коррекции его местоположения по мере прохождения мерного участка.
Недостатком способа [2] является недостаточная точность определения поправок к координатам местоположения ЛА, поскольку определяют угловые колебания ЛА только по тангажу с точностью измерения до единиц градусов.
Техническим результатом предлагаемого изобретения является повышение точности навигации летательных аппаратов путем определения результирующего вектора угловых колебаний летательных аппаратов (суммарного по тангажу и по крену) для управления их движением.
Технический результат достигается тем, что в способе навигации летательных аппаратов, заключающемся в измерении наклонных дальностей с использованием многолучевых измерений отраженных сигналов при помощи радиоволн, излучаемых в виде лучей, определении интегральных параметров отраженных сигналов, определении угловых колебаний летательных аппаратов по тангажу относительно вертикали на основе анализа интегральных параметров отраженных сигналов для управления движением летательных аппаратов, для определения угловых колебаний летательных аппаратов определяют результирующий вектор угловых колебаний летательных аппаратов, характеризующий суммарный угол отклонения по тангажу и по крену. Лучи многолучевых измерений расположены в двух ортогональных плоскостях, одна из которых совпадает с направлением движения и к которой принадлежат первый луч центральный, второй луч боковой, расположенный сзади центрального луча, и третий луч боковой, расположенный впереди центрального луча, другая плоскость лучей перпендикулярна направлению движения летательного аппарата, и к которой принадлежат первый луч центральный, четвертый луч боковой, расположенный слева от центрального луча, и пятый луч боковой, расположенный справа от центрального луча по направлению движения, причем углы отклонения всех боковых лучей относительно центрального луча одинаковы. Анализ интегральных параметров отраженных сигналов многолучевых измерений проводят путем сравнения интегральных параметров отраженных сигналов по боковым лучам многолучевых измерений над плоским участком поверхности. Сравнивают интегральные параметры отраженных сигналов попарно для каждой плоскости. Получают составляющую угла отклонения нормальной оси летательного аппарата от вертикали по тангажу, находящуюся в плоскости, совпадающей с направлением движения летательного аппарата, значение которой определяют путем сравнения интегральных параметров второго луча бокового и третьего луча бокового. Получают составляющую угла отклонения нормальной оси летательного аппарата от вертикали по крену, находящуюся в плоскости, перпендикулярной направлению движения летательного аппарата, значение которой определяют путем сравнения интегральных параметров четвертого луча бокового и пятого луча бокового. Определяют результирующий вектор угловых колебаний летательного аппарата, характеризующий суммарный угол отклонения нормальной оси летательного аппарата от вертикали по тангажу и по крену в связанной системе координат летательного аппарата для управления движением летательного аппарата. Определение результирующего вектора угловых колебаний летательного аппарата в связанной системе координат летательного аппарата проводят последовательно через равные промежутки времени для выявления изменений угловых колебаний по тангажу и по крену летательного аппарата при его движении.
Способ навигации ЛА поясняют следующие чертежи:
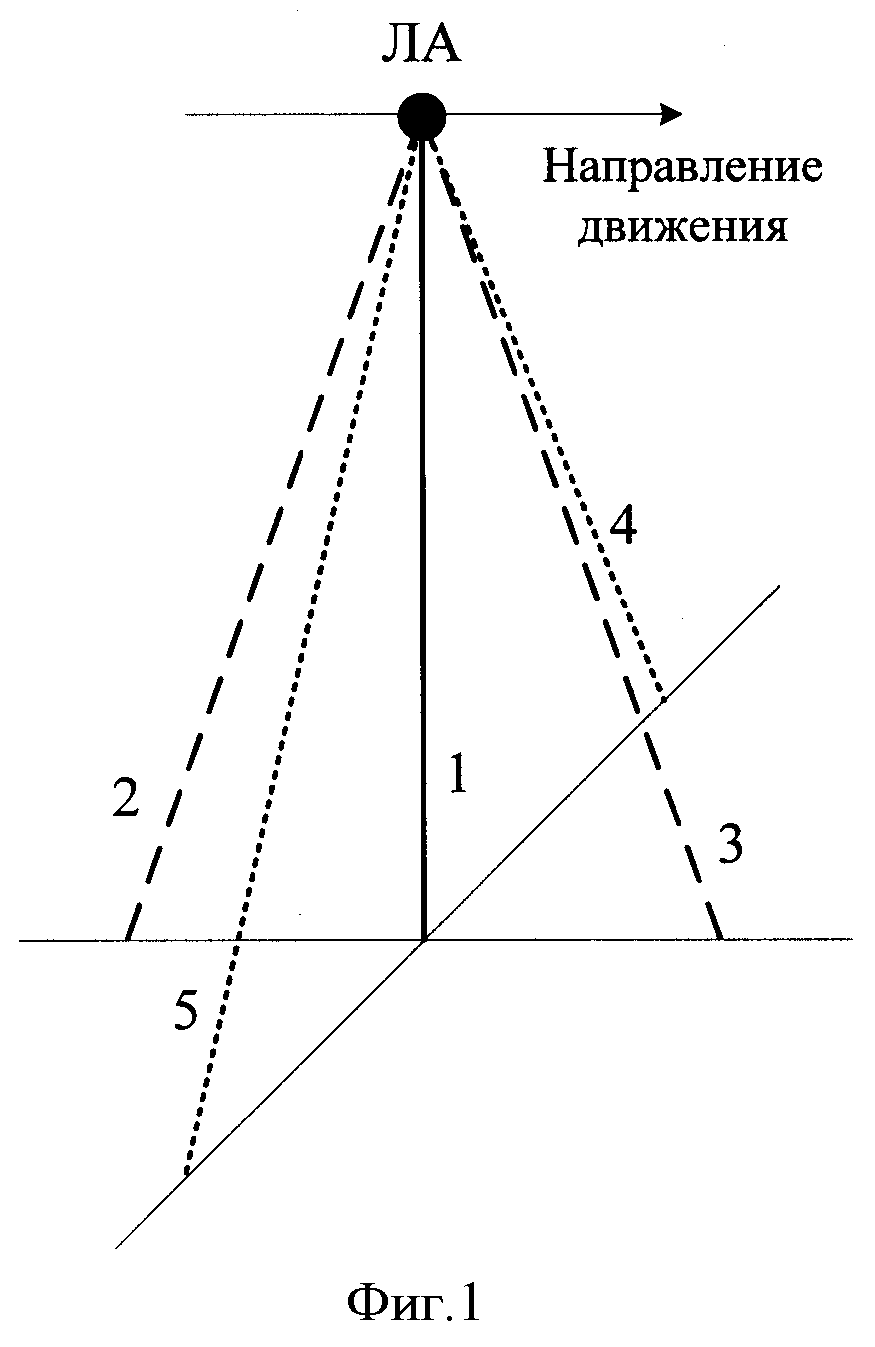
- на фигуре 1 показано взаимное расположение лучей радиоволн при определении формы отраженных сигналов по отдельным лучам: 1 - первый луч центральный; 2 - второй луч боковой; 3 - третий луч боковой; 4 - четвертый луч боковой; 5 - пятый луч боковой; лучи 1, 2 и 3 расположены в одной плоскости (плоскость B, фиг.3), а лучи 1, 4 и 5 расположены в другой плоскости (плоскость C, фиг.3);
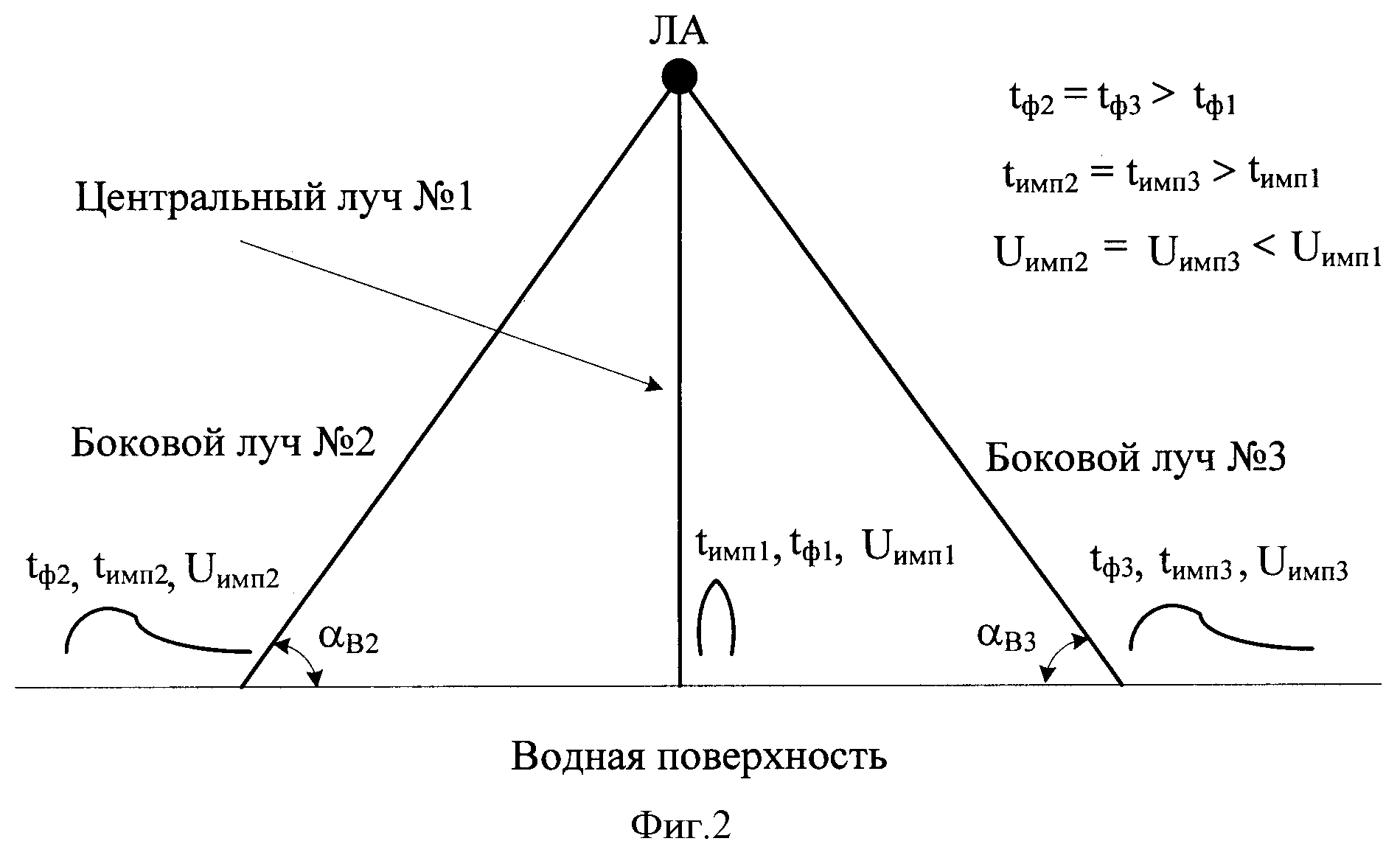
- на фигуре 2 приведены формы отраженных сигналов (импульсов) для плоскости, в которой расположены 1, 2 и 3 лучи. Для центрального луча 1 (перпендикулярно плоской поверхности) отраженный импульс будет иметь амплитуду (Uимп1), длительность фронта по уровню 0,1-0,9 от амплитуды (tф1) и длительность импульса на уровне 0,5 от амплитуды (tимп1). Для бокового луча №2 (под углом αB2 к плоской поверхности) отраженный импульс будет иметь амплитуду (Uимп2), длительность фронта по уровню 0,1-0,9 от амплитуды (tф2) и длительность импульса на уровне 0,5 от амплитуды (tимп2). Для бокового луча №3 (под углом αB3 к плоской поверхности) отраженный импульс будет иметь амплитуду (Uимп3), длительность фронта по уровню 0,1-0,9 от амплитуды (tф3) и длительность импульса на уровне 0,5 от амплитуды (tимп3);
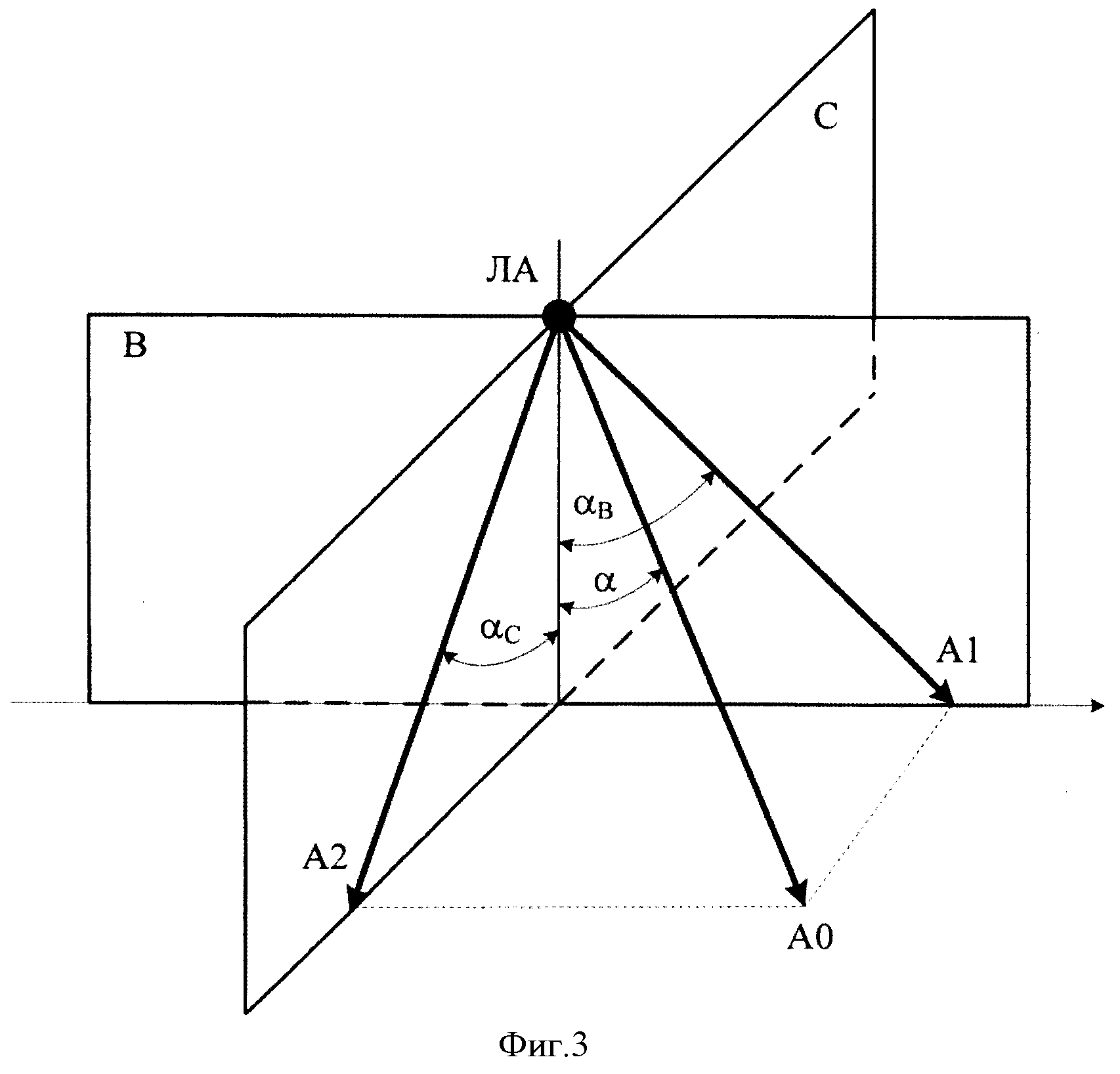
- на фигуре 3 показано взаимное расположение ортогональных плоскостей лучей: расположение плоскости B совпадает с направлением движения ЛА, расположение плоскости C перпендикулярно направлению движения ЛА; A1 - вектор, характеризующий угловые колебания ЛА в плоскости B (одна ортогональная составляющая угла отклонения нормальной оси ЛА от вертикали по тангажу в связанной системе координат ЛА), A2 - вектор, характеризующий угловые колебания ЛА в плоскости C (другая ортогональная составляющая угла отклонения нормальной оси ЛА от вертикали по крену в связанной системе координат ЛА), А0 - результирующий вектор, характеризующий пространственные угловые колебания ЛА; αB - угол, определяющий положение вектора A1 в плоскости B (отклонение по тангажу); αC - угол, определяющий положение вектора A2 в плоскости C (отклонение по крену); α - пространственный угол отклонения результирующего вектора А0 от вертикали (угол отклонения нормальной оси ЛА от вертикали и по тангажу и по крену в связанной системе координат ЛА, характеризующий угловые колебания ЛА);
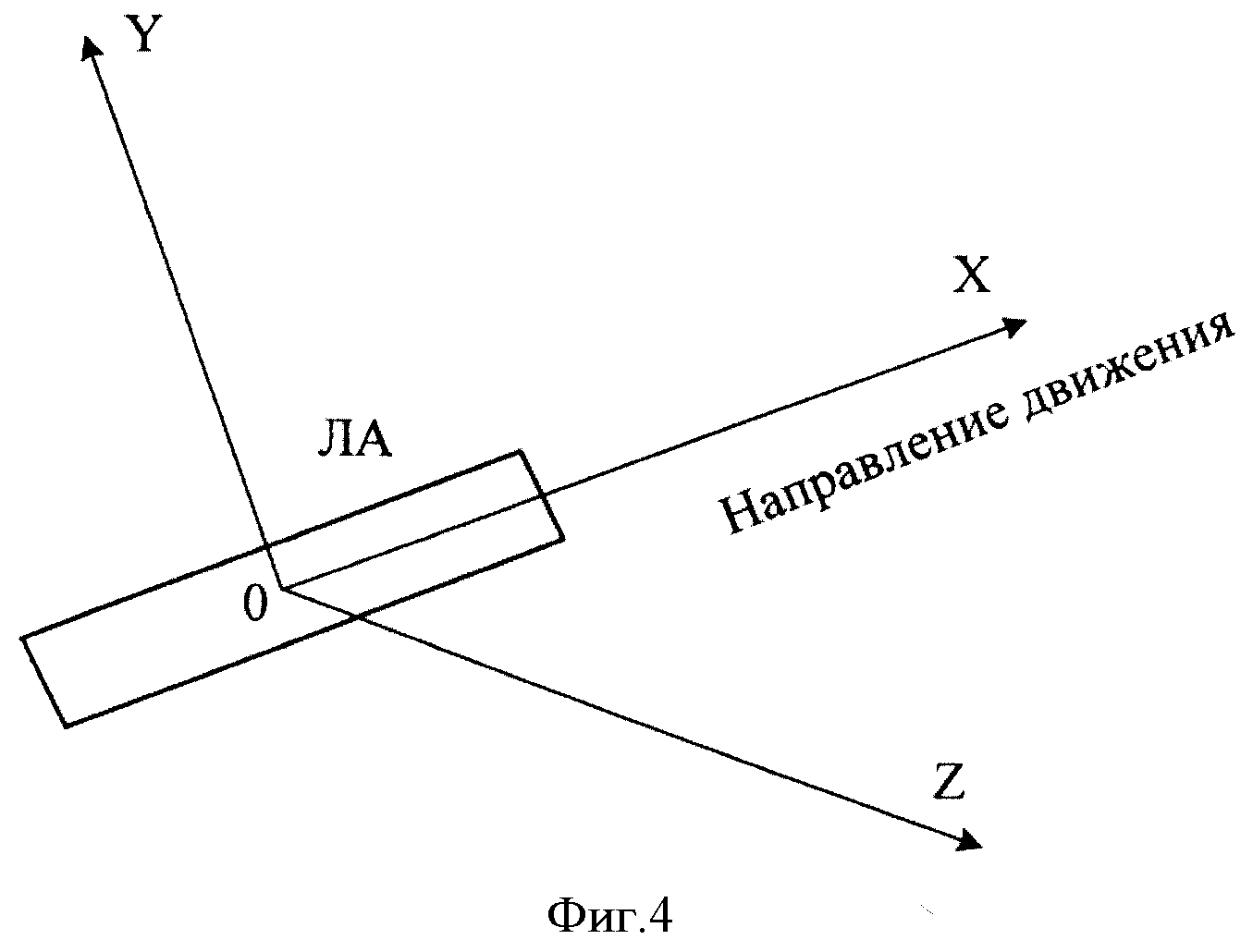
- на фигуре 4 показана связанная система координат летательного аппарата согласно ГОСТ 20058-80 [3], OY - нормальная ось связанной системы координат ЛА;
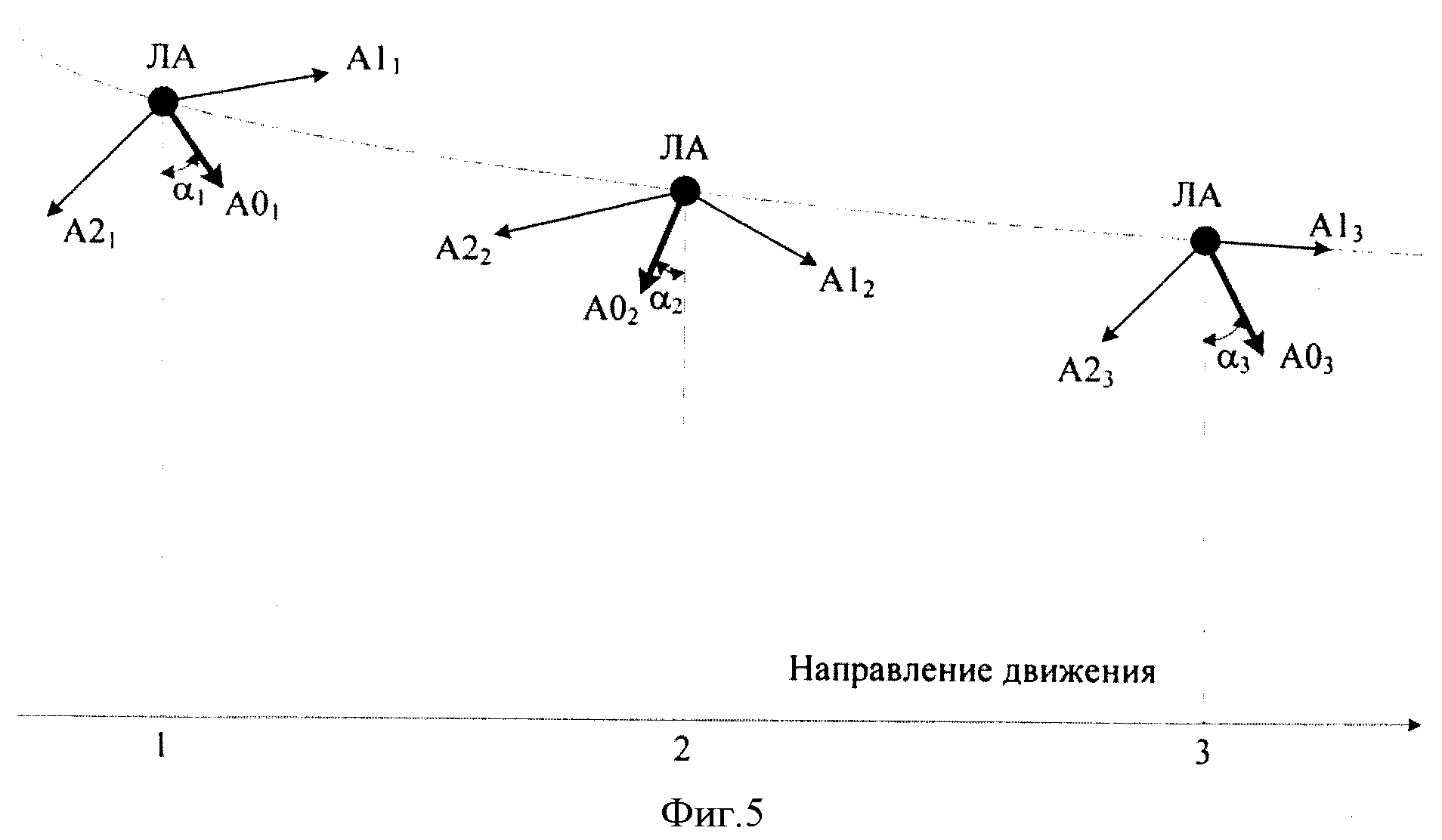
- на фигуре 5 представлена зависимость последовательности временных положений ЛА (три положения: 1, 2 и 3) по траектории движения и пространственные углы отклонения нормальной оси ЛА от вертикали: угол α1 для положения «1», угол α2 для положения «2» и угол α3 для положения «3» (положения указаны по направлению движения ЛА);
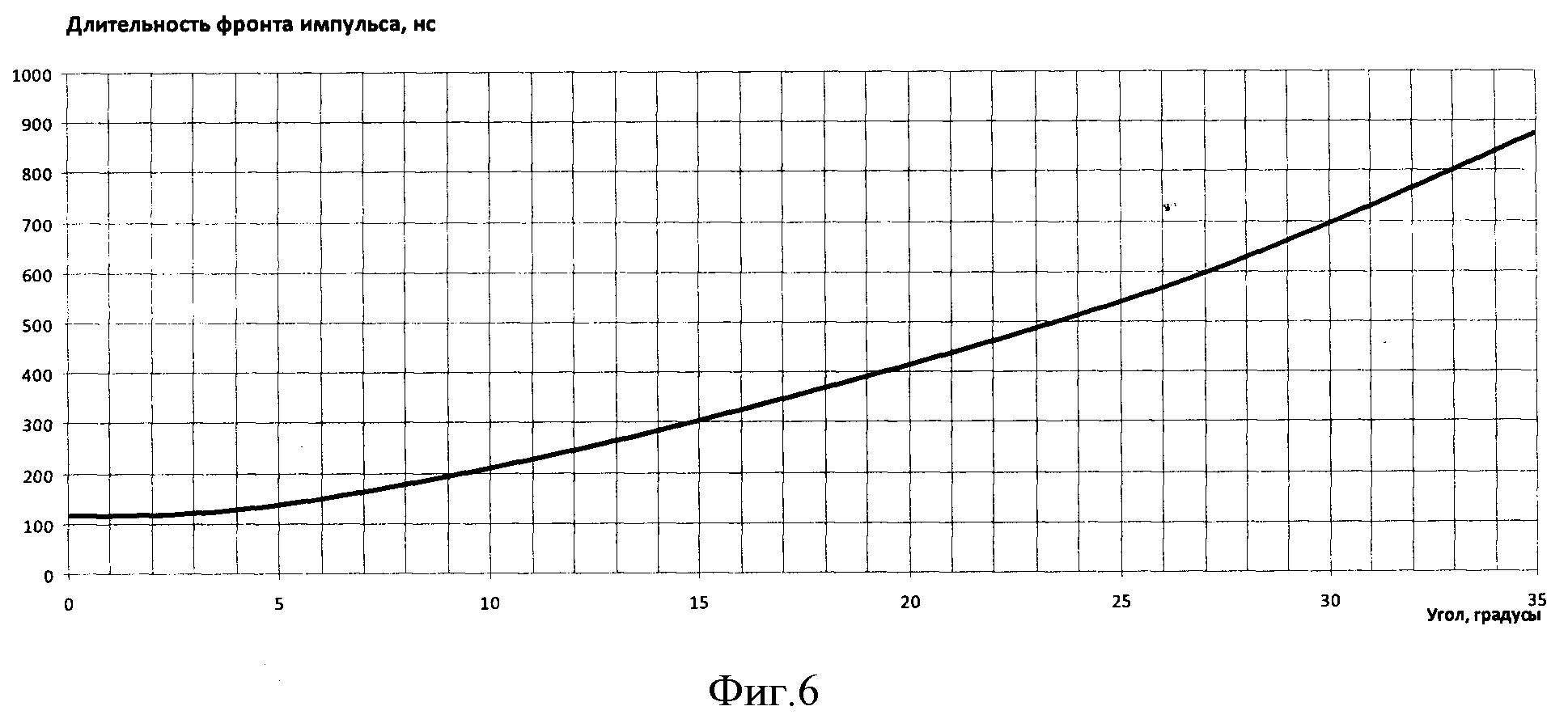
- на фигуре 6 показана зависимость длительности фронта отраженного импульса при изменении результирующего вектора угловых колебаний ЛА (его значения и пространственного положения);
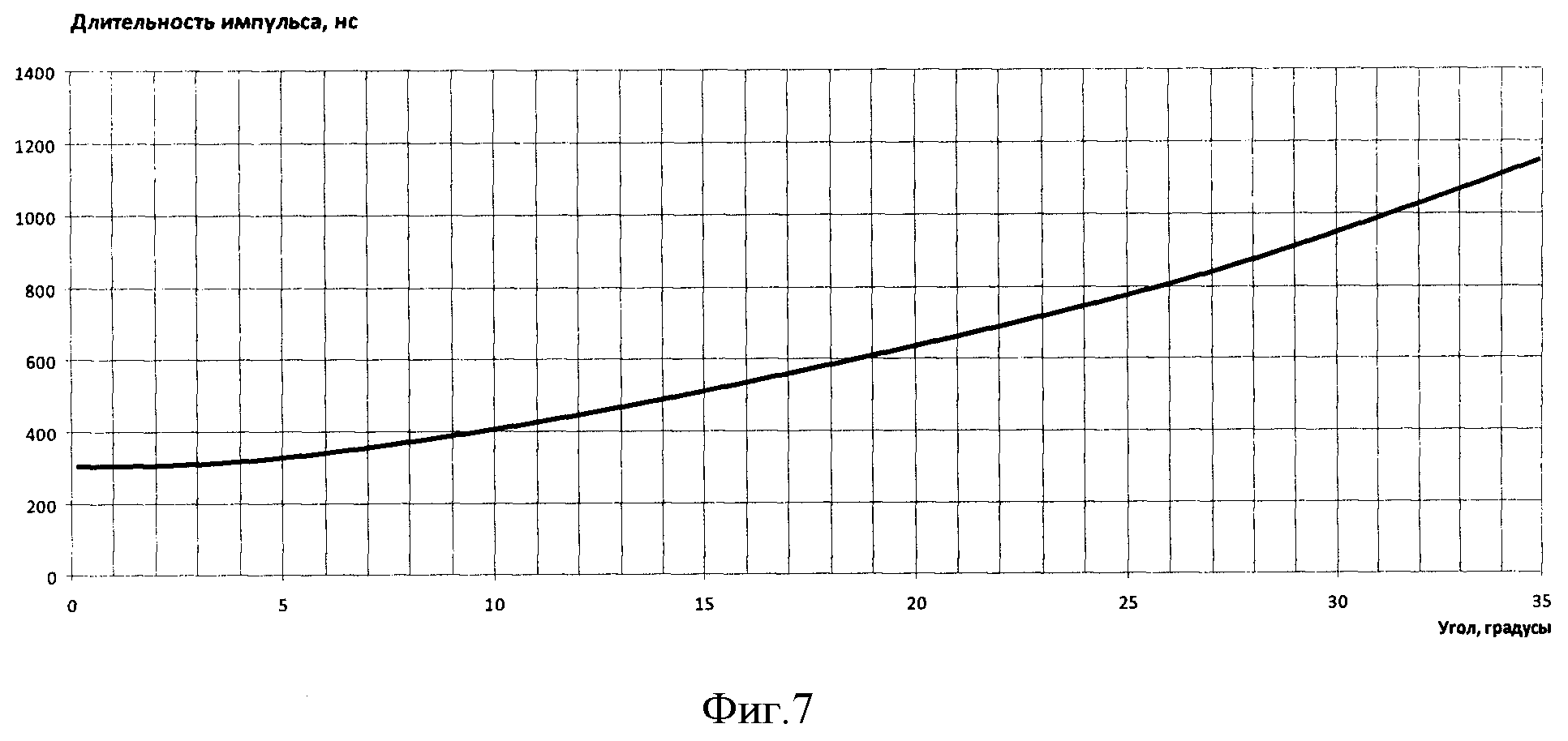
- на фигуре 7 представлена зависимость длительности отраженного импульса при изменении результирующего вектора угловых колебаний ЛА (его значения и пространственного положения).
Способ навигации реализуется следующим образом.
Реализацию способа навигации ЛА рассмотрим на примере определения угловых колебаний ЛА с помощью лучей радиоволн, три из которых расположены в плоскости, совпадающей с направлением движения ЛА, а три луча находится в плоскости, перпендикулярной направлению движения ЛА.
Реализация способа заключается в следующем.
Выбирают необходимый участок подстилающей поверхности, который представляет собой плоскую поверхность - гладкие поверхности типа: бетон, асфальт, вода. Для примера рассмотрим водную поверхность.
Измерения формы отраженных сигналов (импульсов) от подстилающей поверхности проводят при помощи многолучевых измерений с помощью радиоволн. Лучи радиоволн излучают следующим образом.
Вначале излучают лучи, расположенные в ортогональной плоскости В (фиг.3), положение которой совпадает с направлением движения ЛА. Первым излучают центральный луч, перпендикулярный подстилающей поверхности (первый луч, фиг.1). Далее излучают лучи 2 и 3 (фиг.1): второй луч боковой, расположенный сзади центрального луча (по направлению движения ЛА), третий луч боковой, расположенный впереди центрального луча (по направлению движения ЛА).
Излучают лучи, расположенные в ортогональной плоскости С (фиг.3), расположенной перпендикулярно направлению движения ЛА (плоскости С принадлежит первый луч центральный). Излучают лучи 4 и 5: четвертый луч боковой, расположенный слева от центрального луча (по направлению движения ЛА), пятый луч боковой, расположенный справа от центрального луча (по направлению движения).
Углы отклонения всех боковых лучей относительно центрального луча одинаковы.
При определении результирующего вектора угловых колебаний ЛА, характеризующего суммарные угловые колебания ЛА по тангажу и по крену, проводят анализ интегральных параметров (ИП) отраженных сигналов многолучевых измерений путем сравнения ИП отраженных сигналов по боковым лучам многолучевых измерений над водной поверхностью.
Измеряют форму огибающих отраженных сигналов для боковых лучей, усредненных за такт многолучевых измерений, принадлежащих ортогональным плоскостям B (фиг.3) (угловые колебания по тангажу) и C (фиг.3) (угловые колебания по крену).
Определяют интегральные параметры каждого отраженного сигнала. Например, как показано на фиг.2 для плоскости B.
Фиксируют полученные результаты измерений.
Сравнивают интегральные параметры отраженных сигналов попарно для плоскостей B и C.
Получают две ортогональные составляющие результирующего вектора угловых колебаний ЛА в связанной системе координат ЛА (фиг.3).
Составляющая угла отклонения αB нормальной оси ЛА от вертикали по тангажу определяется вектором A1 (фиг.3), который расположен в плоскости B, совпадающей с направлением движения ЛА, а значение αB определяют путем сравнения интегральных параметров второго луча бокового и третьего луча бокового.
Составляющая угла отклонения αC нормальной оси ЛА от вертикали по крену определяется вектором A2 (фиг.3), который расположен в плоскости C, перпендикулярной направлению движения ЛА, а значение αC определяют путем сравнения интегральных параметров четвертого луча бокового и пятого луча бокового.
Получают результирующий вектор АО, определяющий угол отклонения α нормальной оси ЛА от вертикали и по тангажу и по крену в связанной системе координат ЛА (ось OY, фиг.4).
Определяют угол отклонения α результирующего вектора угловых колебаний ЛА в связанной системе координат ЛА (фиг.3).
Фиксируют результаты измерений угла α для управления движением ЛА.
Полученное значение угла α представляет собой мгновенное значение результирующего вектора угловых колебаний ЛА, характеризующего суммарные угловые колебания ЛА по тангажу и по крену. Для выявления динамики изменений угловых колебаний ЛА при его движении значения угла α результирующего вектора угловых колебаний ЛА определяют последовательно через равные промежутки времени. На фигуре 5 выбраны три положения ЛА по траектории движения, обозначенные как: «1», «2» и «3». Каждому положению ЛА соответствуют свои значения векторов A1 (для положения «1» вектора: A11, А12, А13), A2 (для положения «2» вектора: А21, A22, A23) и А0 (для положения «3» вектора: A01, A02, A03) и свои значения углов отклонения α. При этом получают последовательные значения углов α1, α2, α3 (по тангажу и по крену) по направлению движения ЛА. Причем в общем случае

Рассмотрим более подробно указанный алгоритм.
При определении результирующего вектора угловых колебаний ЛА выбирают в качестве подстилающей поверхности водную поверхность (фиг.2), поскольку она позволяет исключить из рассмотрения средний угол наклона подстилающей поверхности, который будет равен нулю для водной поверхности. Кроме этого используют связанную систему координат ЛА согласно ГОСТ 20058-80 [3] (фиг.4).
Измеряют форму отраженных сигналов по двум лучам (фиг.2, боковые лучи 2 и 3) и определяют ИП импульсов, усредненных за такт многолучевых измерений, по лучам 2 и 3.
Отраженный импульс первого луча имеет максимальную амплитуду, минимальные длительности фронта и длительность импульса по отношению к амплитуде, длительностям фронта и длительностям отраженных импульсов второго и третьего (боковых) лучей (фиг.2)

При равенстве углов отклонения второго и третьего лучей относительно центрального луча формы отраженных импульсов второго и третьего лучей совпадают (фиг.2).
При отсутствии угловых колебаний ЛА в плоскости, совпадающей с направлением движения ЛА, боковые углы αВ2 и αB3 равны между собой (фиг.2)

На практике

Это означает, что существуют угловые колебания ЛА в плоскости В (по тангажу). При этом формы отраженных импульсов второго и третьего лучей различны, что ведет к различию ИП второго и третьего лучей.
Измеряют ИП отраженных импульсов лучей 2 и 3 (фиг.2).
Используют базу данных об ИП отраженных сигналов и определяют значение угла отклонения нормальной оси ЛА от вертикали в связанной системе координат ЛА в плоскости B - αB (по тангажу) (фиг.3).
Аналогичная ситуация существует и для угловых колебаний ЛА в плоскости C (по крену). Исходно полагаем

Наличие угловых колебаний по крену дает различия ИП четвертого и пятого боковых лучей. Используя ИП отраженных импульсов лучей 4 и 5 и базу данных об ИП отраженных сигналов, определяют угол отклонения нормальной оси летательного аппарата от вертикали в связанной системе координат ЛА в плоскости С - αC (по крену) (фиг.3).
Определив углы αB (по тангажу) и αC (по крену), находят результирующий вектор угловых колебаний ЛА в связанной системе координат ЛА (фиг.3).
Результирующий вектор угловых колебаний ЛА, характеризующий суммарный угол отклонения нормальной оси ЛА от вертикали по тангажу и по крену в связанной системе координат ЛА (угол α), определяется совокупностью углов, возникающих при движении ЛА и дающих вклад в угловые колебания ЛА.
Определяют значение угловых колебаний ЛА в виде значения угла α, которое используют для управления движением ЛА (фиг.3).
При необходимости определяют последовательность значений результирующего вектора угловых колебаний ЛА (значения и пространственные положения), который характеризуется набором углов αi, где i=1, 2, 3, … для ряда значений временных положений ЛА через равные промежутки времени (фиг.5).
Управляют движением ЛА с учетом полученных значений углов колебаний αi ЛА (фиг.5).
При проведении многолучевых измерений отраженных сигналов при помощи радиоволн, излучаемых в виде лучей, существует зависимость длительности отраженных импульсов и изменения длительности их фронтов от результирующего вектора угловых колебаний ЛА (его значения и пространственные положения) в связанной системе координат ЛА. Изменения формы отраженных импульсов получаются существенные. Поэтому можно точно измерить, зафиксировать ИП отраженных сигналов и создать на их основе базу данных об ИП отраженных сигналов.
Таким образом, база данных об ИП отраженных сигналов содержит информацию о зависимости ИП отраженных сигналов (длительности отраженных импульсов и изменения длительности их фронтов) при изменении значения и пространственного положения результирующего вектора угловых колебаний ЛА.
Для определения работоспособности рассмотренного способа навигации ЛА было проведено его моделирование. В результате были получены зависимости, приведенные на фиг.6 и фиг.7.
На фиг.6 представлена зависимость длительности фронта отраженного импульса по уровню 0,1-0,9 при изменении результирующего вектора угловых колебаний ЛА (его значения и пространственного положения) при использовании в качестве заданного участка водной поверхности.
Общая зависимость изменения длительности фронта отраженного импульса при изменении угла характеризуется крайне малой нелинейностью и плавностью. Максимальное изменение длительности фронта составляет порядка 175 не при углах отклонения 30°-35°, а минимальное - порядка 100 не при углах 5°-10°.
На фиг.7 представлена зависимость длительности импульса на уровне 0,5 при изменении результирующего вектора угловых колебаний ЛА (его значения и пространственного положения) при использовании в качестве заданного участка водной поверхности
Общая зависимость изменения длительности фронта отраженного импульса при изменении угла характеризуется крайне малой нелинейностью и плавностью. Максимальное изменение длительности фронта составляет порядка 200 не при углах отклонения 30°-35°, а минимальное - порядка 50 не при углах 5°-10°.
При проведении измерений сравнивают интегральные параметры отраженных импульсов, полученных по лучам 2 и 3, по лучам 4 и 5. Определяют результирующий вектор угловых колебаний ЛА (его значения и пространственного положения) в связанной системе координат ЛА, используя зависимости, представленные на фиг.6 и фиг.7 (базу данных об ИП отраженных сигналов).
Полученные изменения длительности отраженных импульсов и длительности их фронта в рассмотренном диапазоне изменения углов имеют достаточно большую величину (от 50 до 200 нс), их можно измерить и зафиксировать на практике, обеспечив точность измерения суммарного угла отклонения нормальной оси ЛА от вертикали по тангажу и по крену в связанной системе координат ЛА порядка десяти угловых минут.
Учет угловых колебаний при движении ЛА по тангажу и по крену в виде двух ортогональных составляющих позволяет проводить навигацию ЛА с более высокой точностью. Так, если в прототипе угловые колебания по тангажу определялись с точностью до единиц градусов, то данный способ позволяет определять угловые колебания по тангажу и по крену с точностью порядка десяти минут.
Данный способ навигации ЛА имеет существенные отличия от известных способов навигации, поскольку обеспечивается управление движением ЛА с учетом угловых колебаний по тангажу и по крену при движении ЛА, измеренных с точностью порядка десяти угловых минут.
Литература
1. Абросимов В.Н., Алексеева В.И., Гребенко Ю.А. и др. Использование системы NAVSTAR для определения угловой ориентации объектов // Зарубежная радиоэлектроника. - 1989. - N1. - С.46-53.
2. Патент №2471152, МПК G01C 23/00 (2006.01), G01S 5/02 (2010.01). Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В. // Изобретения. Полезные модели. - 2012. - Опубл. 27.12.2012. - Бюл. №36. (прототип).
3. ГОСТ 20058-80. Динамика летательного аппарата в атмосфере. Термины, определения и обозначения. - М.: Госкомитет по стандартам, 1980. - 54 с.
Устройство для облучения изделий потоком атомов водорода с тепловыми скоростями
Способ получения открытопористого наноструктурного металла
Способ определения коэффициента относительной эффективности и эквивалентной дозы источника рентгеновского излучения
Способ навигации движущихся объектов
Устройство для ограничения интенсивности лазерного излучения
Устройство резервирования
Способ переработки фосфатного редкоземельного концентрата, выделенного из апатита
Способ снижения заброса частоты вращения вала нагнетателя газоперекачивающего агрегата при помпаже нагнетателя
Система для пневматической транспортировки тритийвоспроизводящих детекторов в канале наработки трития бланкета термоядерного реактора
Способ предотвращения воспламенения, горения и взрыва водородовоздушных смесей
Устройство для облучения изделий потоком атомов водорода с тепловыми скоростями
Способ получения открытопористого наноструктурного металла
Способ определения коэффициента относительной эффективности и эквивалентной дозы источника рентгеновского излучения
Способ навигации движущихся объектов
Устройство для ограничения интенсивности лазерного излучения
Устройство резервирования
Способ переработки фосфатного редкоземельного концентрата, выделенного из апатита
Способ снижения заброса частоты вращения вала нагнетателя газоперекачивающего агрегата при помпаже нагнетателя
Система для пневматической транспортировки тритийвоспроизводящих детекторов в канале наработки трития бланкета термоядерного реактора
Способ предотвращения воспламенения, горения и взрыва водородовоздушных смесей

