Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ КАМЕРЫ
Вид РИД
Изобретение
Изобретение относится к оптико-электронным приборам, предназначенным для осуществления автоматической фокусировки объективов и может быть использовано в кино-, фото- и телевизионных камерах и направлено на повышение точности фокусировки, преимущественно в таких случаях, как съемка малоразмерных объектов с низким контрастом.
Известны различные способы автоматической фокусировки камеры, как активные, включающие в себя излучающие дальномеры (пат. US №4367027 от 12.03.1980), так и пассивные. Пассивная автоматическая фокусировка бывает двух типов: фазовая (пат. US №5589909 от 31.12.1996) и контрастная (пат. US №5170202 от 08.12.1992).
Наиболее близким к предлагаемому изобретению является способ автоматической фокусировки, включающий в себя:
- вычисление множества различных значений параметров резкости, каждое из которых соответствует различному положению фокусирующего устройства, при помощи проведения дискретного вейвлет-преобразования над множеством изображений, захваченных при различных положениях фокусирующего устройства и приведенных из RGB представления в яркостное представление;
- перемещение фокусирующего устройства в положение, соответствующее максимальному значению параметра резкости, определяемому путем сравнений множества вычисленных различных значений параметров резкости (пат. РФ №2389050 от 10.05.2010).
Однако недостатком этого способа является сложность выполнения автоматической фокусировки камеры на малоразмерных объектах с низкой контрастностью.
Технической задачей, на решение которой направлено изобретение, является повышение точности фокусировки камеры на малоразмерных объектах с низким контрастом.
Для решения указанной технической задачи в известном способе автоматической фокусировки, включающем:
- вычисление множества различных значений параметров резкости, каждое из которых соответствует различному положению фокусирующего устройства, при помощи проведения дискретного вейвлет-преобразования над множеством изображений, захваченных при различных положениях фокусирующего устройства и приведенных из RGB представления в яркостное представление;
- перемещение фокусирующего устройства в положение, соответствующее максимальному значению параметра резкости, определяемому путем сравнений множества вычисленных различных значений параметров резкости, согласно изобретению предложен следующий алгоритм вычисления значения параметра резкости:
- для каждого пикселя изображения выполняется преобразование RGB сигналов основных цветов в равноконтрастное пространство;
- вычисляется оценка цветовых различий мелких деталей, заметных для глаза, относительно цветовых координат пикселей окружающего фона в нормированной равноконтрастной системе координат;
- выполняется оценка контраста и распознавания мелких деталей, с этой целью выполняется сканирование изображения с помощью скользящего окна с размерами 3×3 пикселя, на каждой итерации, в окне выполняется алгоритм распознавания изображения мелкой структуры, с этой целью в процессе анализа распознается объект - является ли он точечным объектом или фрагментом тонкой линии, для распознавания применяются бинарные изображения мелких структур, по которым определяются пространственные координаты пикселей объекта и фона, анализ производится по всем типам мелких структур, начиная с первой (точечный объект), вычисляются средние значения цветовых координат фона и объекта, проверяются условия цветового различия между соседними пикселями фона и между соседними пикселями объекта, заметными для глаза, вычисляется контраст объекта относительно фона, при котором мелкие детали различаются глазом, и при этом точечный объект считается распознанным и фиксируются его пространственные координаты центра, выполняется перемещение окна на три пикселя и анализируются следующие блоки изображения;
- оценивается параметр резкости изображения подсчетом общего количества распознанных блоков в процентном отношении к общему числу пикселей изображения.
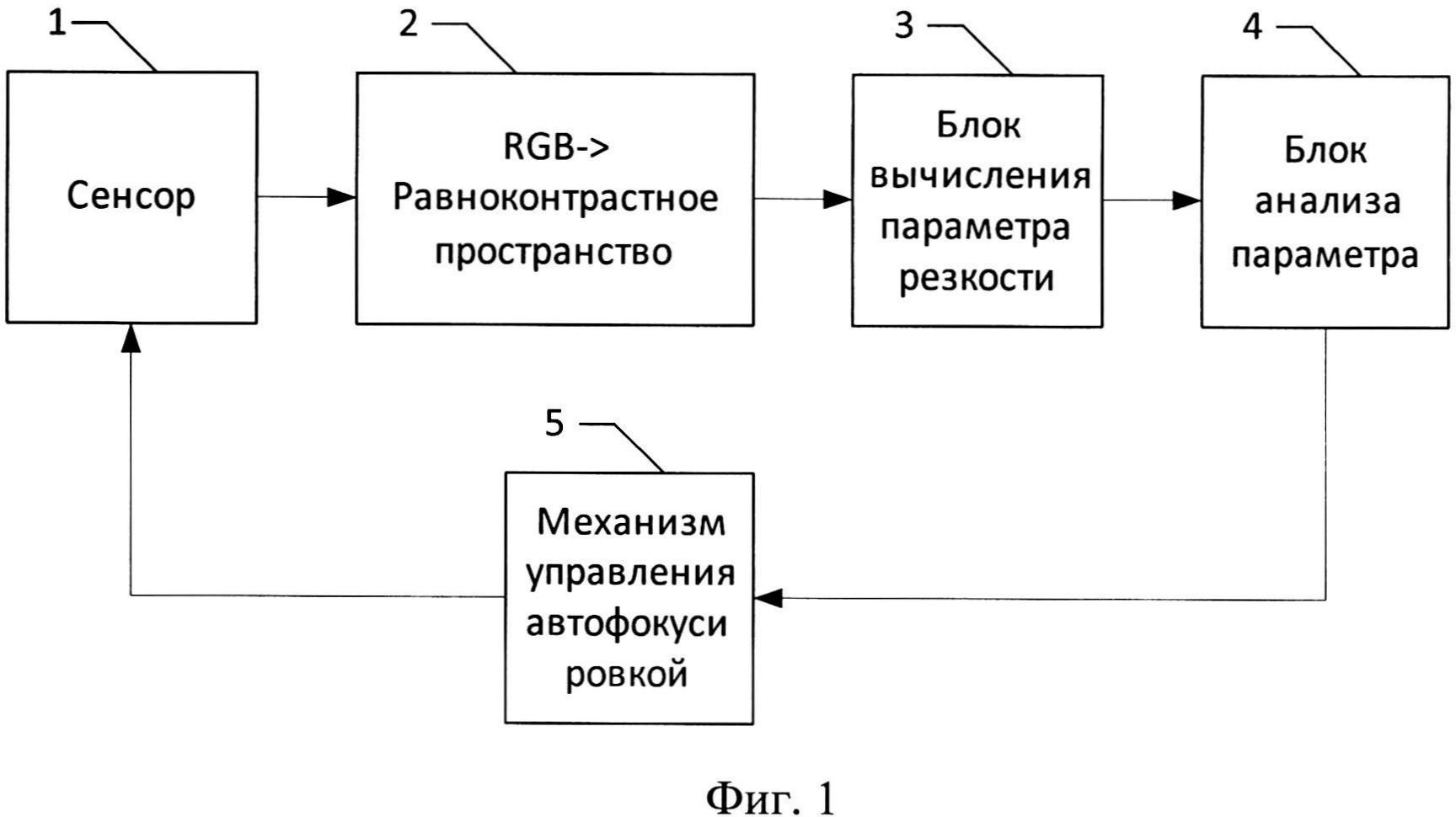
На фиг.1 приведена блок-схема устройства, в котором может быть реализован заявляемый способ. Устройство содержит следующие блоки, где 1 - сенсор захвата изображения, связанный с блоком преобразования изображения из RGB представления в равноконтрастное представление; 2 - блок преобразования изображения из RGB представления в равноконтрастное представление, связанный с сенсором и блоком вычисления параметра резкости; 3 - блок вычисления параметра резкости, связанный с блоком изображения из RGB представления в равноконтрастное представление и с блоком анализа параметра резкости; 4 - блок анализа параметра резкости, связанный с блоком вычисления параметра резкости и с механизмом управления автофокусировкой; 5 - механизм управления автофокусировкой, связанный с блоком анализа параметра резкости и с сенсором для захвата изображения.
Пример реализации способа.
1. При начальном значении расстояния, на которое производится наводка на резкость (Li), выполняется попиксельное преобразование RGB сигналов основных цветов в равноконтрастную систему координат. Используется равноконтрастная система координат W*U*V*:
W*=25 Y1/3-17, U*=13W*(u-uo), V*=13W*(ν-νo),
где W* - светлота (индекс яркости); U* и V* - координаты цветности (индексы цветности); u и ν - координаты цветности диаграммы Мак-Адама; uo и νo - координаты цветности опорного белого uo=0,201, νo=0,307.
2. Выполняется распознавание малоразмерных объектов изображения с помощью скользящего окна с размерами 3×3 пикселя.
Устанавливается счетчик распознанных блоков в значение NR=0.
На каждой итерации, в окне выполняется распознавание по следующему алгоритму.
а) Вычисляется контраст блока

где  ,
,  и
и  - максимальные и минимальные значения цветовых координат по индексам яркости и цветности в скользящем окне изображения 3×3 пикселя. Значения
- максимальные и минимальные значения цветовых координат по индексам яркости и цветности в скользящем окне изображения 3×3 пикселя. Значения  ,
,  ,
,  - пороговые значения зрительного контраста мелких деталей по индексам яркости и цветности, полученные экспериментальным путем, и определены числом минимальных цветовых порогов зрения (МЦП):
- пороговые значения зрительного контраста мелких деталей по индексам яркости и цветности, полученные экспериментальным путем, и определены числом минимальных цветовых порогов зрения (МЦП):  и
и  .
.
б) Проверяется условие: если ΔK<2 принимается решение о том, что изменение контраста в блоке незаметно для глаза, далее блок исключается из анализа и окно перемещается на один пиксель; иначе полагается, что в окне присутствует различимый для глаза элемент изображения, который может быть: точечным объектом; фрагментом тонкой линии; фрагментом текстуры; фрагментом контурного перепада.
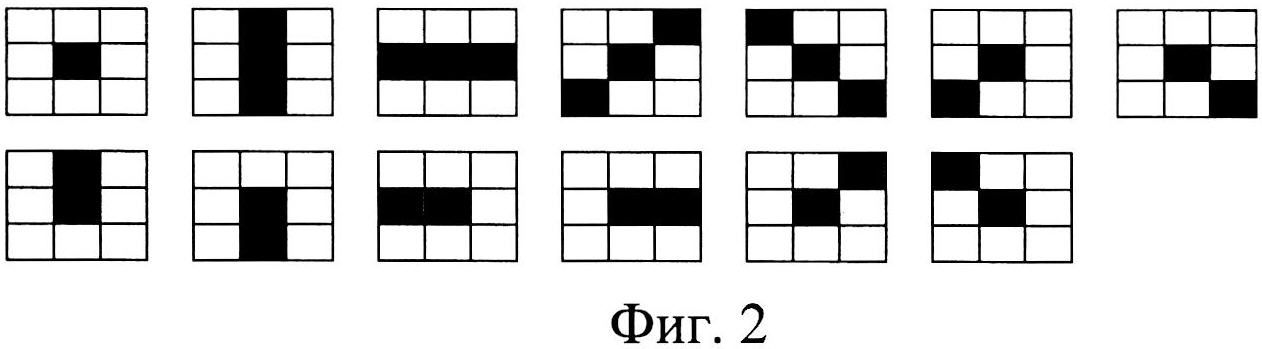
Для распознавания объекта применяются бинарные изображения (эталоны) мелких деталей. На фиг.2 представлены эталоны точечного объекта и фрагментов тонких линий с вертикальной, горизонтальной и наклонной ориентацией, а также фрагменты их окончаний.
Распознавание начинается с первой структуры и устанавливается счетчик эталона Kэ в значение 0. Зная пространственные координаты объекта и фона эталонного изображения, в текущем окне (3×3), вычисляется средние значения цветовых координат объекта  и фона
и фона  . Средние значения для индекса ярости:
. Средние значения для индекса ярости:
 и
и  ,
,
где n и m - пространственные координаты объекта и фона эталона в окне (3×3) анализируемого блока изображения; No - число пикселей объекта; Mb - число пикселей фона. Аналогично вычисляются средние значения по индексам цветности.
в) Вычисляется цветовой контраст ΔKo(n) каждого пикселя объекта с пространственной координатой n, относительно среднего значения:

и цветовой контраст ΔKb(m) каждого пикселя фона с пространственной координатой m:

г) Проверяются условия:
 и
и 
Выполнение этих условий означает, что в среднем цветовые различия между пикселями фона и между пикселями объекта незаметны для глаза и, принимается решение о том, что объект распознан. Следовательно, инкрементируется счетчик распознанных блоков: NR=NR+1.
д) Фиксируются пространственные координаты его блока (i, j) и перемещается окно на три пикселя с целью анализа следующего блока изображения. Если условия (2) не выполняются, то осуществляется переход к распознаванию следующей структуры (фиг.2) и устанавливается счетчик эталона Kэ в значение Kэ+1. Если после анализа всех деталей Kэ=0…12, условия (2) так и не выполнены, считается, что в текущем окне объект не распознан.
е) Выполняется смещение окна на один элемент и осуществляется переход к этапу 2.
3. Подсчитывается количество распознанных блоков и вычисляется среднее значение для заданного расстояния, на которое производится наводка на резкость Li
 ,
,
где Nx·Ny - формат изображения (общее количество пикселей).
4. Изменяется расстояние, на которое производится наводка на резкость Li, на Li+1=Li±ΔL, где ΔL - шаг расстояния, на которое производится наводка на резкость, и повторяются этапы 2-3.
5. Вычисляется функция  , находится значение максимума
, находится значение максимума  , определяется значение i и, следовательно, Li - требуемое расстояние, на которое производится наводка на резкость.
, определяется значение i и, следовательно, Li - требуемое расстояние, на которое производится наводка на резкость.
На фиг.3 приведена зависимость параметра резкости от перемещения фокусирующего устройства при поиске максимального значения параметра резкости при съемке малоразмерного изображения объекта с низким контрастом. Локальный максимум на фиг.3 соответствует фокусировке на объекте.
Таким образом, заявленный способ позволяет повысить точность фокусировки камеры на малоразмерных объектах с низким контрастом.
Способ автоматической пассивной фокусировки камеры на малоразмерных объектах изображения с низким контрастом, включающий вычисление множества различных значений параметров резкости, каждое из которых соответствует различному положению фокусирующего устройства, при помощи проведения дискретного вейвлет-преобразования над множеством изображений, захваченных при различных положениях фокусирующего устройства и приведенных из RGB представления в яркостное представление; перемещение фокусирующего устройства в положение, соответствующее максимальному значению параметра резкости, определяемому путем сравнений множества вычисленных различных значений параметров резкости, отличающийся тем, что вычисление значения параметра резкости производится следующим образом: для каждого пикселя изображения выполняется преобразование RGB сигналов основных цветов в равноконтрастное пространство; вычисляется оценка цветовых различий мелких деталей, заметных для глаза, относительно цветовых координат пикселей окружающего фона в нормированной равноконтрастной системе координат; выполняется оценка контраста и распознавания мелких деталей, с этой целью выполняется сканирование изображения с помощью скользящего окна с размерами 3×3 пикселя, на каждой итерации, в окне выполняется алгоритм распознавания изображения мелкой структуры, с этой целью в процессе анализа распознается объект - является ли он точечным объектом или фрагментом тонкой линии, для распознавания применяются бинарные изображения мелких структур, по которым определяются пространственные координаты пикселей объекта и фона, анализ производится по всем типам мелких структур, начиная с первой (точечный объект), вычисляются средние значения цветовых координат фона и объекта, проверяются условия цветового различия между соседними пикселями фона и между соседними пикселями объекта, заметными для глаза, вычисляется контраст объекта относительно фона, при котором мелкие детали различаются глазом, и при этом точечный объект считается распознанным и фиксируются его пространственные координаты центра, выполняется перемещение окна на три пикселя и анализируются следующие блоки изображения; оценивается параметр резкости изображения подсчетом общего количества распознанных блоков в процентном отношении к общему числу пикселей изображения.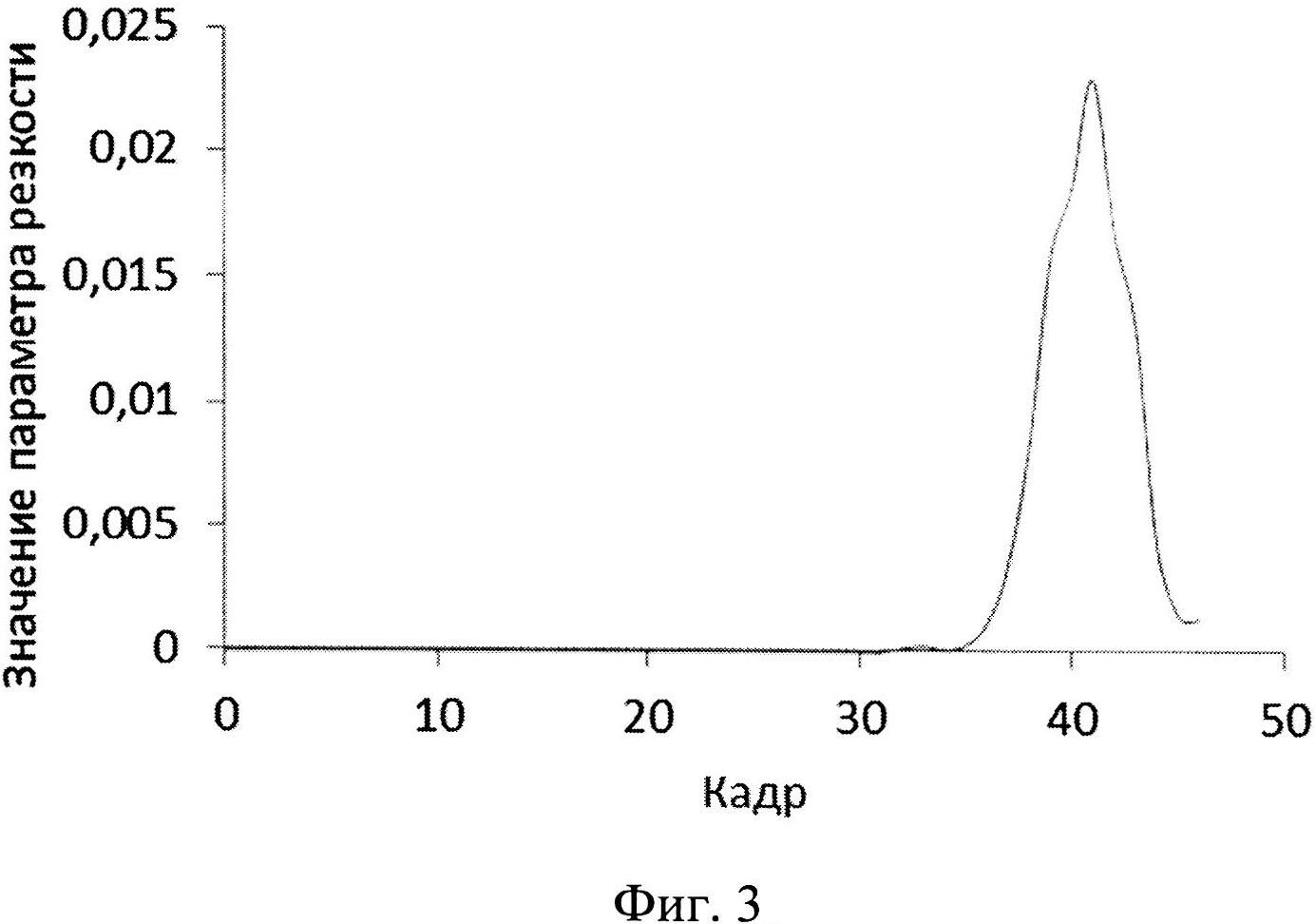
Устройство для лесопользования
Способ ускорения отверждения полимерных покрытий на основе лака этиноль
Устройство для формования изделий из эпоксидной смолы
Адаптивно-робастная система управления для априорно неопределенных нестационарных динамических объектов
Трансмиссия легкого колесного вездехода с бортовым поворотом
Способ изготовления подшипника скольжения
Способ изготовления подшипника скольжения
Гайка
Способ поиска неисправностей в непрерывной динамической системе на основе введения пробных отклонений
Способ поиска неисправного блока в дискретной динамической системе на основе анализа знаков передач сигналов
Аэростатно-канатная система для воздушной заготовки и транспортировки древесины
Смеситель
Водоочиститель
Водоочиститель
Водоочиститель
Водоочиститель
Водоочиститель
Антикоррозионное защитное полимерное покрытие
Радиально-осевой подшипник скольжения
Способ лесопользования

