Результат интеллектуальной деятельности: СИСТЕМА ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА
Вид РИД
Изобретение
Изобретение относится к области космической техники, а точнее к способу ориентации навигационных спутников Земли.
В процессе штатного функционирования спутника на орбите осуществляется его пространственная ориентация на Землю, Солнце, в плоскости орбиты: одновременно по двум или трем вышеперечисленным направлениям [1].
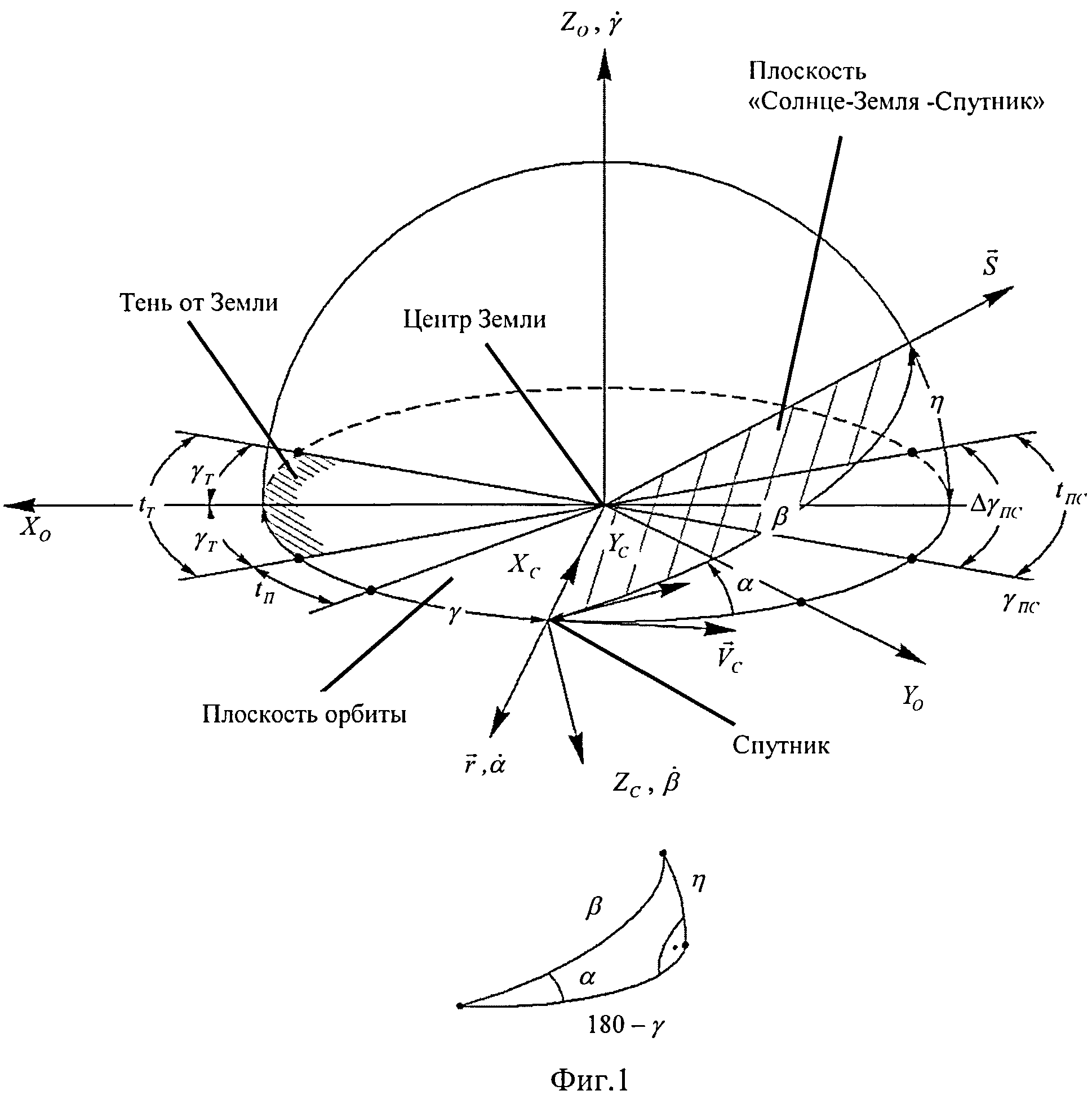
Пространственное положение связанной с центром масс спутника системой координат XcYcZc в зависимости от углового движения спутника по орбите (угол γ) в наземной орбитальной системе координат X0Y0Z0 определяется из решения сферического треугольника (см. фиг.1):


где β - угол «Солнце - Земля - Спутник», рассчитывается по формуле: β=180-РСОЗ, где РСОЗ - угол «Солнце - Объект (Спутник) - Земля» (в дальнейшем СОЗ) в спутниковой орбитальной системе координат; γ - угол положения спутника на орбите; η - угол склонения Солнца над плоскостью орбиты; α - угол между плоскость орбиты и плоскостью СОЗ.
За один оборот спутника на орбите (0≤γ≤360°) значения углов слежения ограничены следующими диапазонами: η≤β≤180°-η, η≤α≤90°.
Таким образом, при одновременной ориентации антенн спутника на Землю и панелей солнечных батарей (ПСБ) на Солнце необходимо вводить кинематическую связь, обеспечивающую слежение по углам β и α с помощью одностепенного или двухстепенного приводов.
Угловые скорости слежения определяются дифференцированием уравнений (1) и (2):
 ,
, 

где Kβ, Kα - коэффициенты трансформации скорости слежения;  - угловая скорость движения спутника, для круговых орбит имеющая постоянное значение, равное
- угловая скорость движения спутника, для круговых орбит имеющая постоянное значение, равное  (здесь Т - период обращения спутника по орбите).
(здесь Т - период обращения спутника по орбите).
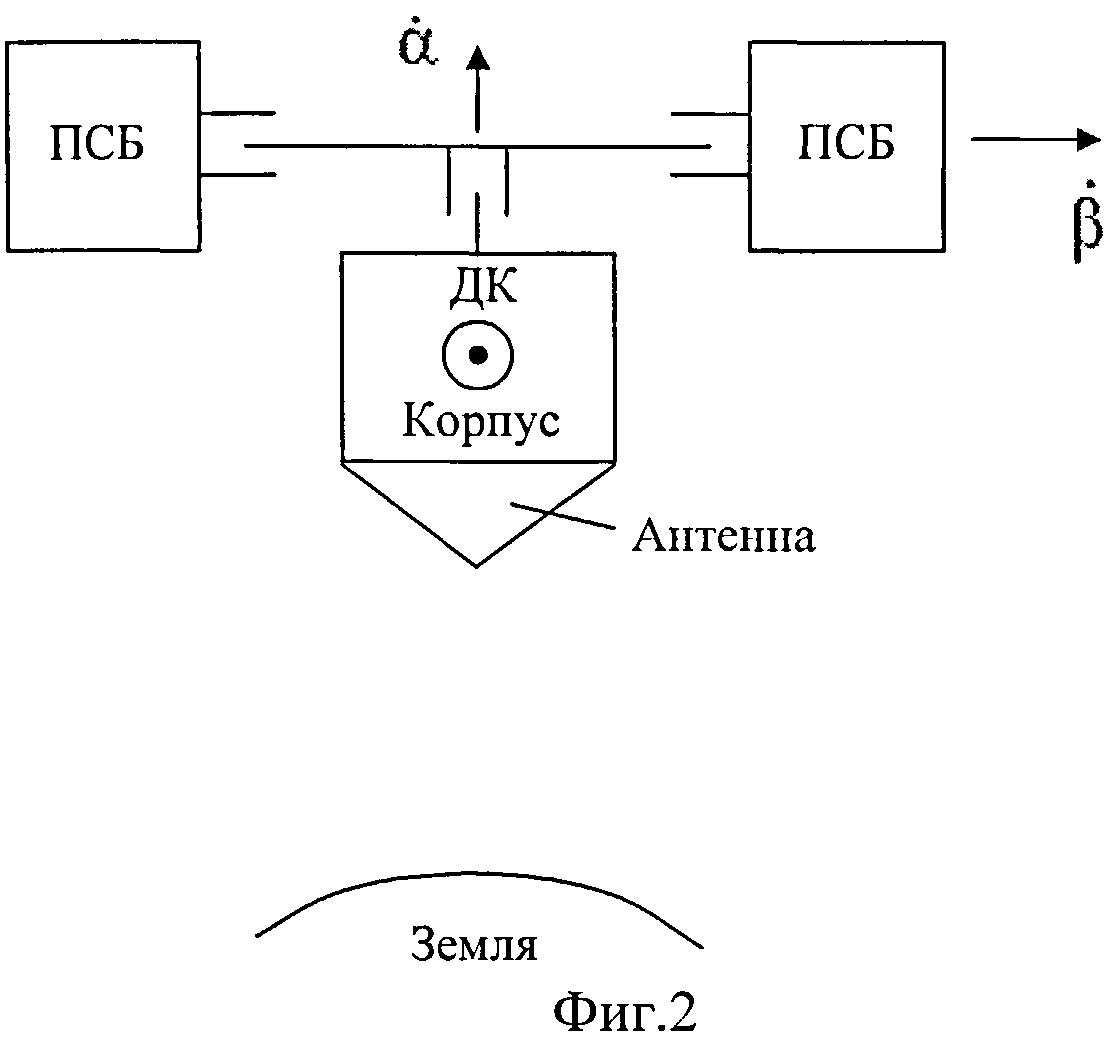
Известен способ ориентации спутника [1], предусматривающий непрерывную трехосную ориентацию корпуса спутника вместе с жестко установленными на нем антеннами и двигателями коррекции (ДК) в орбитальной системе координат (на Землю и в плоскости орбиты) и ориентацию панелей солнечных батарей на Солнце с помощью привода, кинематически связанного с корпусом спутника (см. фиг.2). Такая схема ориентации нашла применение на связных спутниках, требующих непрерывного слежения узконаправленных диаграмм антенн на выбранную зону поверхности Земли, поддержание орбиты выдачей импульсов коррекции при одновременной работе спутника по целевому назначению с организацией непрерывного слежения ПСБ на Солнце разворотом с помощью привода вокруг бинормали к орбите с угловой скоростью  (для геостационарных спутников с одностепенным приводом) и дополнительно вокруг ортогонального направления к бинормали с угловой скоростью
(для геостационарных спутников с одностепенным приводом) и дополнительно вокруг ортогонального направления к бинормали с угловой скоростью  (для спутников с любым наклонением орбиты при наличии двухстепенного привода).
(для спутников с любым наклонением орбиты при наличии двухстепенного привода).
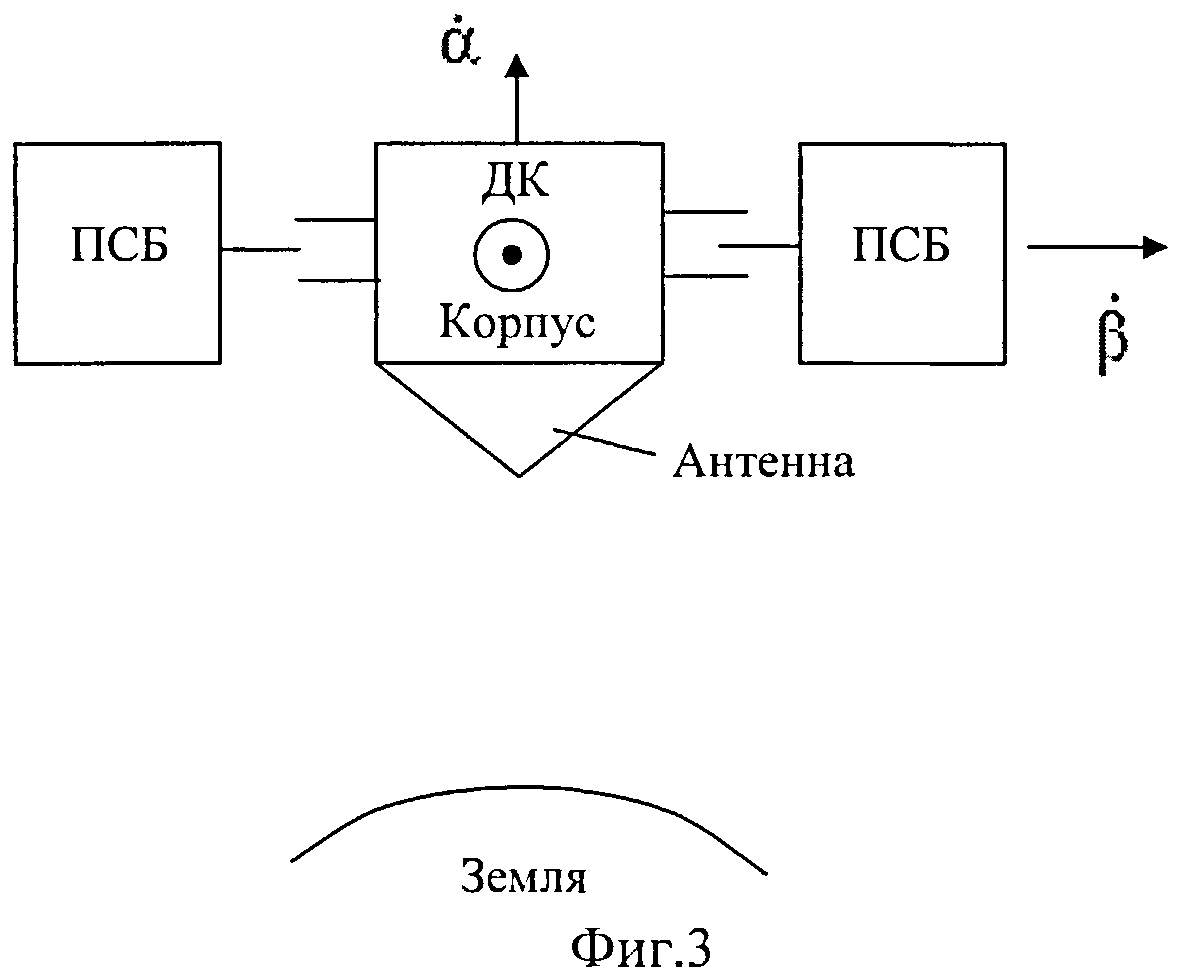
На навигационных спутниках используется антенна с широкой диаграммой направленности, охватывающей всю Землю (глобальная зона обслуживания), а в процессе целевого функционирования не допускается выдача импульсов коррекции. Для этих спутников более приемлема солнечно-земная схема ориентации [1], способ реализации которой наиболее близок к заявляемому техническому решению по технической сущности и достигаемому техническому результату (см. фиг.3).
Известный способ ориентации навигационного спутника включает ориентацию первой оси спутника вместе с антенной на Землю (по радиусу-вектору орбиты) и ориентацию панелей солнечных батарей на Солнце разворотом спутника вместе с панелями солнечных батарей относительно первой оси спутника до совмещения нормали к панелям солнечных батарей с плоскостью «Солнце - Спутник - Земля» и разворотом панелей солнечных батарей вокруг второй оси вращения, перпендикулярной первой, до совмещения нормали к панелям солнечных батарей с направлением на Солнце. Описанный способ принят за прототип изобретения.
В процессе функционирования навигационного спутника на орбите в течение года угол склонения Солнца (угол η) изменяется в диапазоне +90°, что приводит к появлению ситуаций с неопределенностью в ориентации спутника, обусловленных наличием теневых орбит (тень от Земли пересекает орбиту спутника в зоне малых значений угла СОЗ), а также возникновение в зоне больших значений угла СОЗ высоких угловых скоростей слежения по углу α, превышающих возможности исполнительных органов.
Условия возникновения периода теневых орбит определяются неравенством:

где βT - угловой размер теневого участка орбиты спутника от Земли (в дальнейшем - ТУЗ); R - радиус Земли; H - высота круговой орбиты спутника.
Длительность ТУЗ для круговых орбит, используемых навигационными спутниками, определяется из уравнения (1):

где γT - угловая зона теневого участка в плоскости орбиты.
Так, для круговой орбиты навигационного спутника высотой Н≈20000 км угловая скорость  ≈0,5°/мин, значение угла βT≈14,5°, а период времени существования теневых орбит может достигать 25% в течение каждого полугода. При этом максимальная длительность ТУЗ составляет около 8% длительности периода обращения спутника Т [1].
≈0,5°/мин, значение угла βT≈14,5°, а период времени существования теневых орбит может достигать 25% в течение каждого полугода. При этом максимальная длительность ТУЗ составляет около 8% длительности периода обращения спутника Т [1].
На время прохождения ТУЗ слежение ПСБ по углам β и α не осуществляется ввиду отсутствия ориентира (Солнца), в то время как ориентация первой оси XC спутника и, соответственно, электрической оси антенны на Землю поддерживается по информации прибора ориентации на Землю. Поэтому после прохождения ТУЗ начинается восстановление штатной ориентации ПСБ на Солнце путем разворота по углу α вокруг первой оси XC спутника с поисковой скоростью WП1 до совмещения нормали к ПСБ с плоскостью СОЗ и разворота ПСБ по углу β вокруг второй оси ZC спутника с поисковой скоростью WПСБ до совмещения нормали к ПСБ с направлением на Солнце  .
.
Длительность восстановления ориентации зависит от величины рассогласования по углу слежения αП на момент выхода из ТУЗ и включает две операции: совмещение с плоскостью СОЗ (длительность t1) и доразворот ПСБ в плоскости СОЗ (длительность t2) до совмещения нормали к ПСБ с направлением на Солнце: 
где WПСБ - угловая скорость вращения ПСБ.
Начальное значение угла αП, с которого начинается восстановление ориентации, зависит от разворота спутника в тени Земли вокруг первой оси за счет наличия остаточных (случайных) угловых скоростей и является непрогнозируемой величиной, находясь в пределах 0°…180°. Поэтому длительность разворота вокруг первой оси tП является случайной величиной.
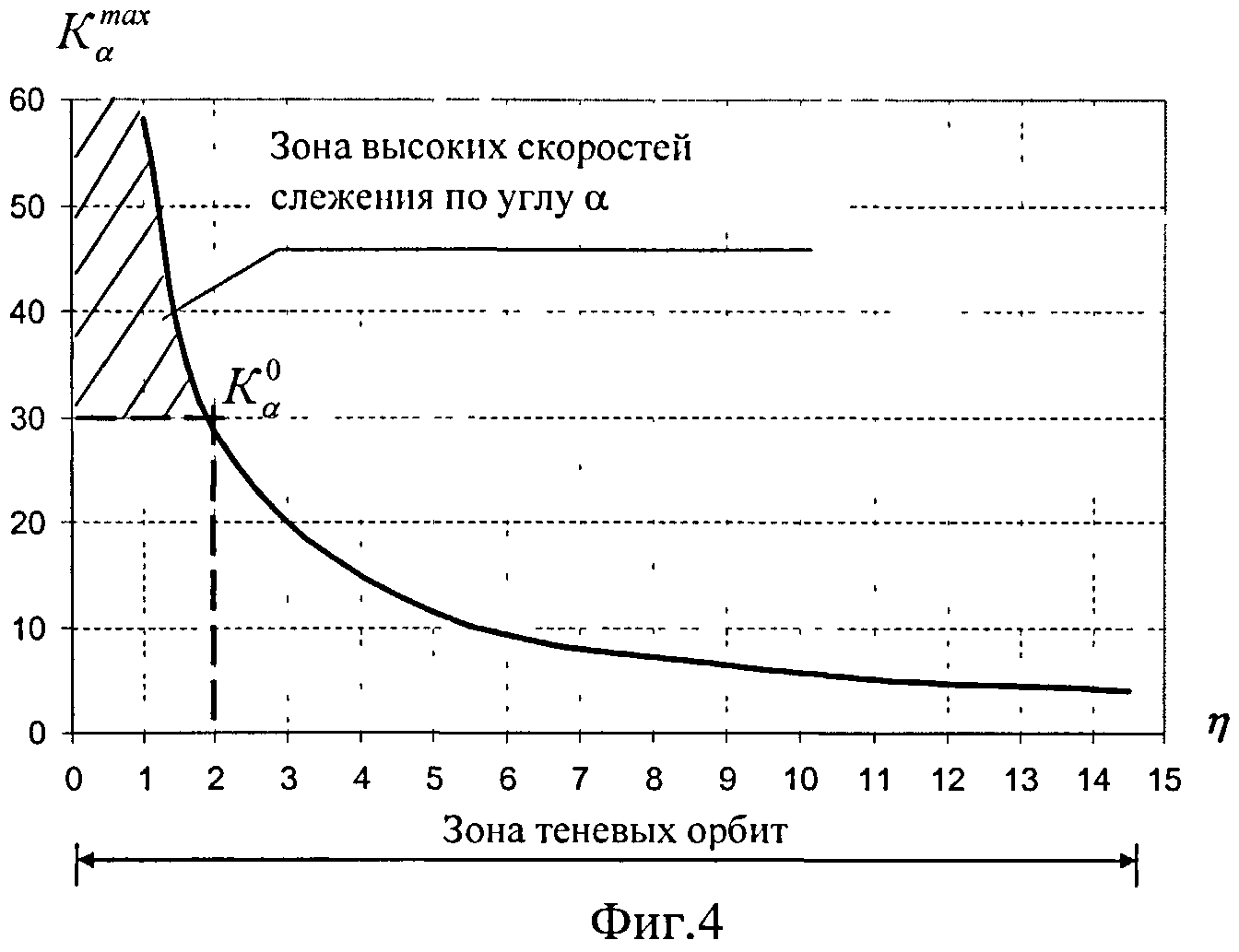
Кроме того, на теневых орбитах в зависимости от положения Солнца относительно плоскости орбиты угловые скорости слежения изменяются в широком диапазоне и достигают максимальных значений в следующих точках орбиты:

Так, для теневых орбит навигационного спутника (H≈20000 км), в соответствии с формулами (8) и (9), этот диапазон равен 0,97≤ ≤1,0, 3,9≤
≤1,0, 3,9≤ <∞. Т.е. на теневых орбитах, удовлетворяющих условию
<∞. Т.е. на теневых орбитах, удовлетворяющих условию  в зонах малых и больших углов СОЗ могут возникать ситуации, когда максимальная скорость слежения вокруг первой оси спутника (угол α) может превысить возможности исполнительных органов слежения
в зонах малых и больших углов СОЗ могут возникать ситуации, когда максимальная скорость слежения вокруг первой оси спутника (угол α) может превысить возможности исполнительных органов слежения  (см. фиг.4).
(см. фиг.4).
Интервалы участка орбиты спутника, где угловая скорость слежения превышает скорость слежения исполнительных органов, определяются из решения квадратного уравнения (4) относительно cos γ:

где γПС - значение угла γ, с которого  ;
;  - реализуемое значение коэффициента трансформации,
- реализуемое значение коэффициента трансформации,  .
.
В зоне орбиты спутника с малыми значениями углов СОЗ, где  , происходит рассогласование программы совмещения второй оси спутника с фактической плоскостью СОЗ, что приводит к увеличению погрешности ориентации ПСБ на Солнце в течение следующего времени:
, происходит рассогласование программы совмещения второй оси спутника с фактической плоскостью СОЗ, что приводит к увеличению погрешности ориентации ПСБ на Солнце в течение следующего времени:

где αП - угол разворота вокруг первой оси в процессе восстановления ориентации, являющийся случайной величиной, распределенной в диапазоне 0<αП≤2(90°-η);
ДγПС - зона углов неопределенности слежения.
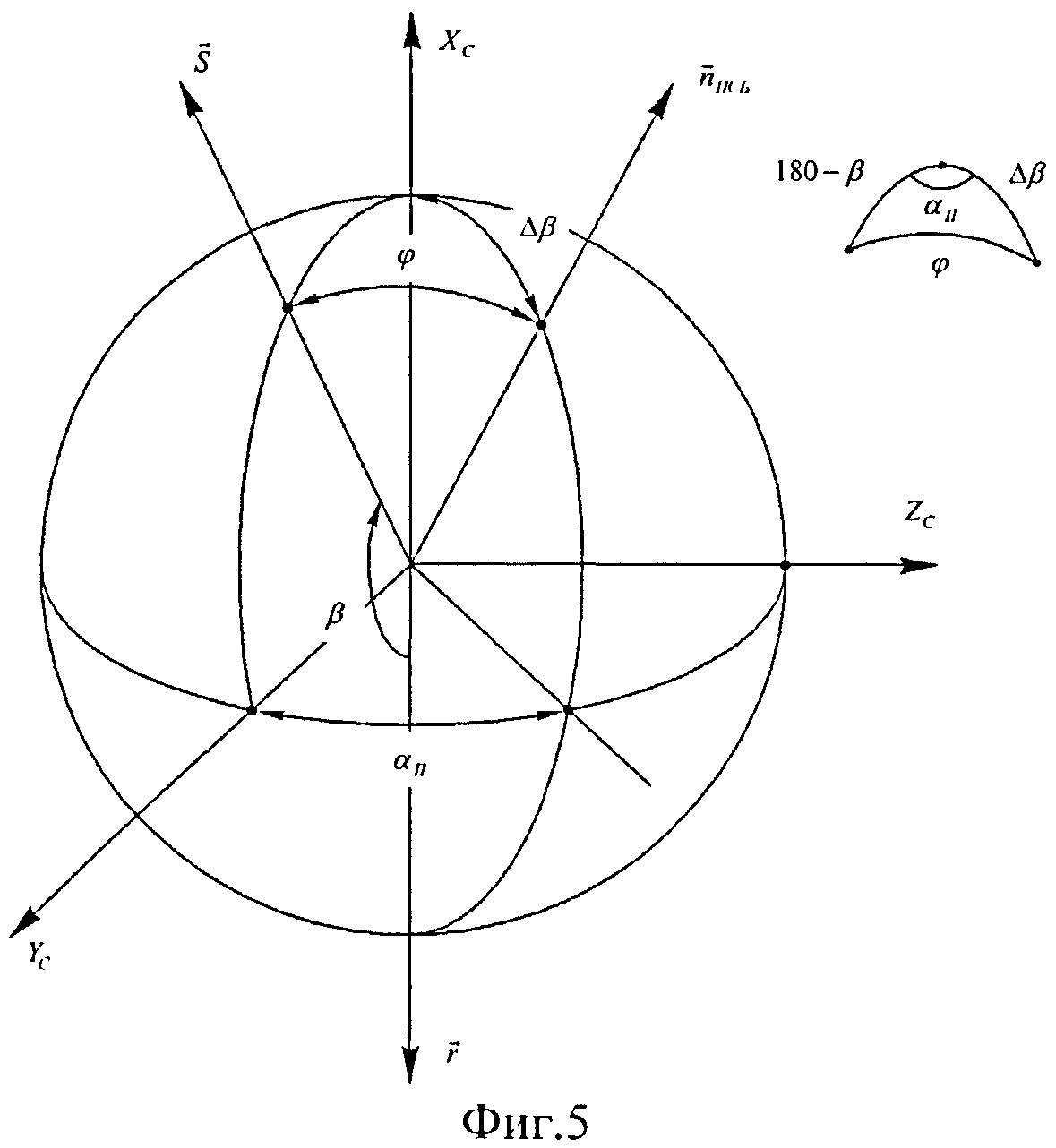
На период неопределенности ориентации ПСБ при прохождении спутником теневой орбиты угол между нормалью к ПСБ и направлением на Солнце определяется следующей зависимостью (см. фиг.5):

где Δβ - угол отклонения нормали к ПСБ от оси ХС на момент входа спутника в ТУЗ; ΔγH - зона неопределенности ориентации, равная γT или ΔγПС.
Вследствие появления непрогнозируемых положений нормали к ПСБ относительно направления на Солнце на интервалах неопределенности (вблизи минимальных и максимальных значений углов СОЗ) возрастают непрогнозируемые составляющие ускорения от силы светового давления, действующего на спутник, что приводит к ухудшению точности прогнозирования параметров движения навигационного спутника на теневых орбитах и, как следствие, повышает погрешность обсервации потребителя по навигационному спутнику.
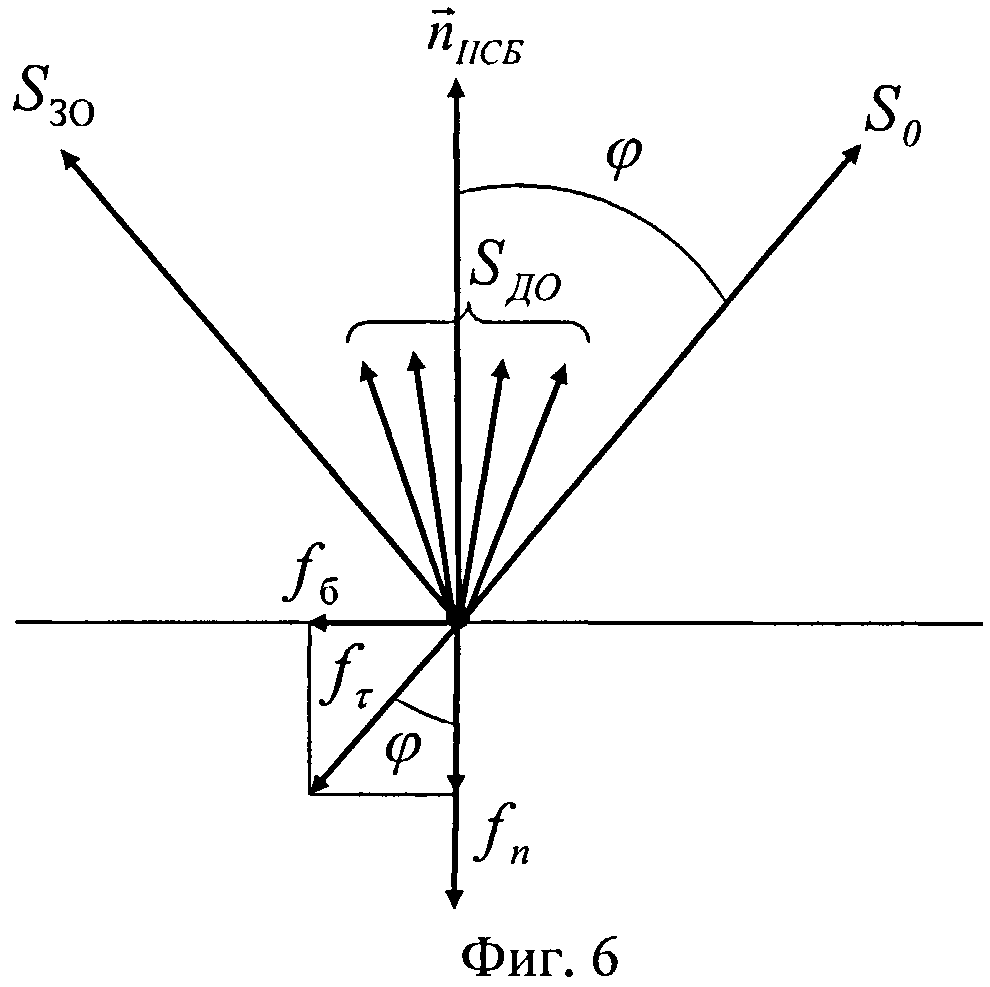
Расчет воздействия сил светового давления на единичную площадку ПСБ проводится по известным формулам [1, 2], учитывающим составляющие от поглощенного (SП), зеркального (SЗО) и диффузно-отраженного (SДО) суммарного солнечного потока (см. фиг.6) и представленных двумя способами:
а) в виде двух векторов, развернутых на угол φ:
fτ - составляющая светового давления, параллельная падающему световому потоку;
fn - составляющая светового давления, параллельная нормали к площадке  ;
;
б) в виде двух ортогональных векторов:
- параллельно нормали к площадке 
- в боковом направлении (в плоскости площадки) 
В интервалах неопределенности боковая составляющая может занимать произвольное положение относительно вектора скорости спутника (угол αП), что вносит погрешность в расчете этих сил ≤2fδ.
Расчеты по формулам (12…13) сил светового давления для спутника ГЛОНАСС в интервале неопределенности tn=15 мин, tПС=40 мин показали, что они отличаются от прогнозируемых значений до 10% по радиусу-вектору и до 30% по вектору скорости.
Это приводит к росту погрешности прогнозирования положения спутника на орбите на суточном интервале до 10% (подтверждено результатами натурных испытаний спутника системы ГЛОНАСС).
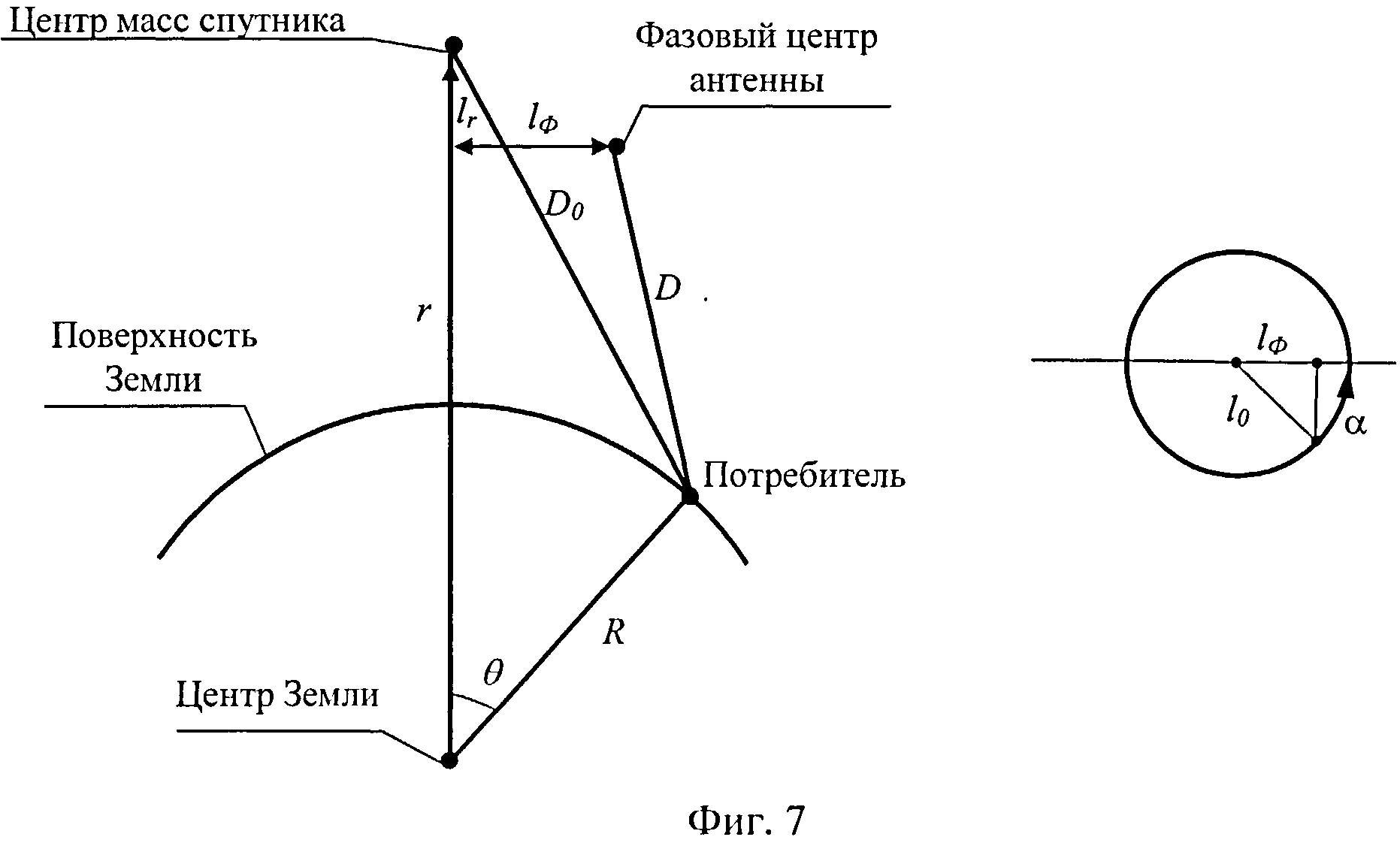
Кроме того, наличие непрогнозируемых разворотов спутника вокруг первой оси (угол α) в зоне малых и больших значений СОЗ вносит дополнительную погрешность в измерениях дальности от спутника до потребителей (ΔD) в случае смещения фазового центра навигационной антенны относительно центра масс спутника (см. фиг.7):
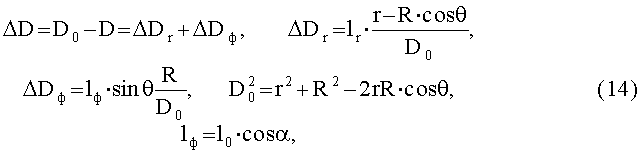
где D0 - дальность до центра масс спутника; D - дальность до фазового центра; ΔDr, ΔDф - составляющие погрешности дальности от смещения фазового центра антенны относительно центра масс спутника; lr - линейное смещение фазового центра антенны вдоль первой оси спутника; R - радиус Земли; θ - угловое положение потребителя относительно радиуса-вектора орбиты спутника r; l0 - линейное смещение фазового центра антенны относительно первой оси спутника.
Необходимо отметить, что смещение фазового центра антенны вдоль первой оси спутника (lr) приводит к появлению постоянной составляющей погрешности измерения дальности, не зависящей от разворотов спутника (ΔDr=const).
Расчеты по формуле (14) максимальной погрешности измерений дальности для спутника ГЛОНАСС для второй составляющей при l0≈0,5 м и 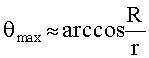 дают величину 0≤ΔDr≤0,13 м, что вносит существенный вклад в определение местоположения потребителя и в расчетах ухода бортового времени спутника [1, 3].
дают величину 0≤ΔDr≤0,13 м, что вносит существенный вклад в определение местоположения потребителя и в расчетах ухода бортового времени спутника [1, 3].
Таким образом, на теневых орбитах штатная ориентация спутника осуществляется при всех углах слежения за исключением интервалов неопределенности вблизи максимальных и минимальных значений углов СОЗ, что является недостатком известного способа.
Технической задачей данного изобретения является повышение точности навигационно-временных определений потребителей по навигационным спутникам.
Данная техническая задача решается за счет того, что в способе ориентации навигационного спутника, включающем ориентацию первой оси спутника вместе с антенной на Землю и ориентацию панелей солнечных батарей на Солнце разворотом спутника вместе с панелями солнечных батарей относительно первой оси спутника до совмещения нормали к панелям солнечных батарей с плоскостью «Солнце - Спутник - Земля» и разворот панелей солнечных батарей вокруг второй оси вращения, перпендикулярной первой, до совмещения нормали к панелям солнечных батарей с направлением на Солнце, осуществляют в заданных интервалах орбиты, охватывающих интервалы неопределенности ориентации спутника на теневых орбитах, независимые упреждающие программные развороты вокруг первой и второй осей спутника на расчетную величину с промежуточным удержанием заданной ориентации.
Независимые упреждающие программные развороты могут быть реализованы различными способами.
Способ ориентации навигационного спутника в интервалах неопределенности, а именно ориентация ПСБ на Солнце, реализуется за счет упреждающего программного разворота вокруг второй оси спутника до совмещения нормали к панелям солнечных батарей с направлением, параллельным первой оси спутника, удержания в этом положении и последующего совмещения нормали к панелям солнечных батарей с направлением на Солнце на заданных интервалах орбиты, охватывающих интервалы неопределенности ориентации спутника и расположенных симметрично относительно максимальных и минимальных значений углов «Солнце - Спутник - Земля».
Совмещение нормали к ПСБ с направлением первой оси ХС спутника (Δβ=0) и удержание в этом положении (ортогональное положение ПСБ) приводит к тому, что при развороте спутника вокруг первой оси (угол αП) величина угла φ не изменяется и равна углу β (см. формулу (11)), а значит, величина ускорения от силы светового давления тоже не изменяется (см. формулы (12)…(13)). То есть для заданного положения ПСБ при заранее заданных величинах интервалов, охватывающих интервалы неопределенности, величина ускорения от силы светового давления является прогнозируемой величиной, определяемой значением угла β и угла γ при заданном значении угла склонения η.
При этом необходимо отметить, что максимальное смещение спутника под воздействием сил светового давления создается ее боковой составляющей, которая меняет свой знак при переходе спутника через точки орбиты γ=0° и γ=180°. Поэтому организация интервалов с ортогональным положением ПСБ симметрично относительно максимального и минимального значений углов СОЗ приведет к взаимной компенсации составляющих сил светового давления по вектору скорости (вносящих максимальный вклад в смещение спутника по орбите) и позволит исключить погрешность прогнозирования из-за погрешностей ориентации в знании оптических характеристик солнечных батарей вследствие их деградации, а также упростить расчеты, так как отпадает необходимость в вычислении сил светового давления по вектору скорости на интервале неопределенности.
Реализация предложенного способа на навигационном спутнике может быть осуществлена следующим способом.
Разворот и удержание ПСБ может быть осуществлен с использованием штатной схемы разворота ПСБ, дополненной в части совмещения нормали к ПСБ с направлением, параллельным первой оси спутника, удержания ПСБ в этом положении и перехода к штатной ориентации.
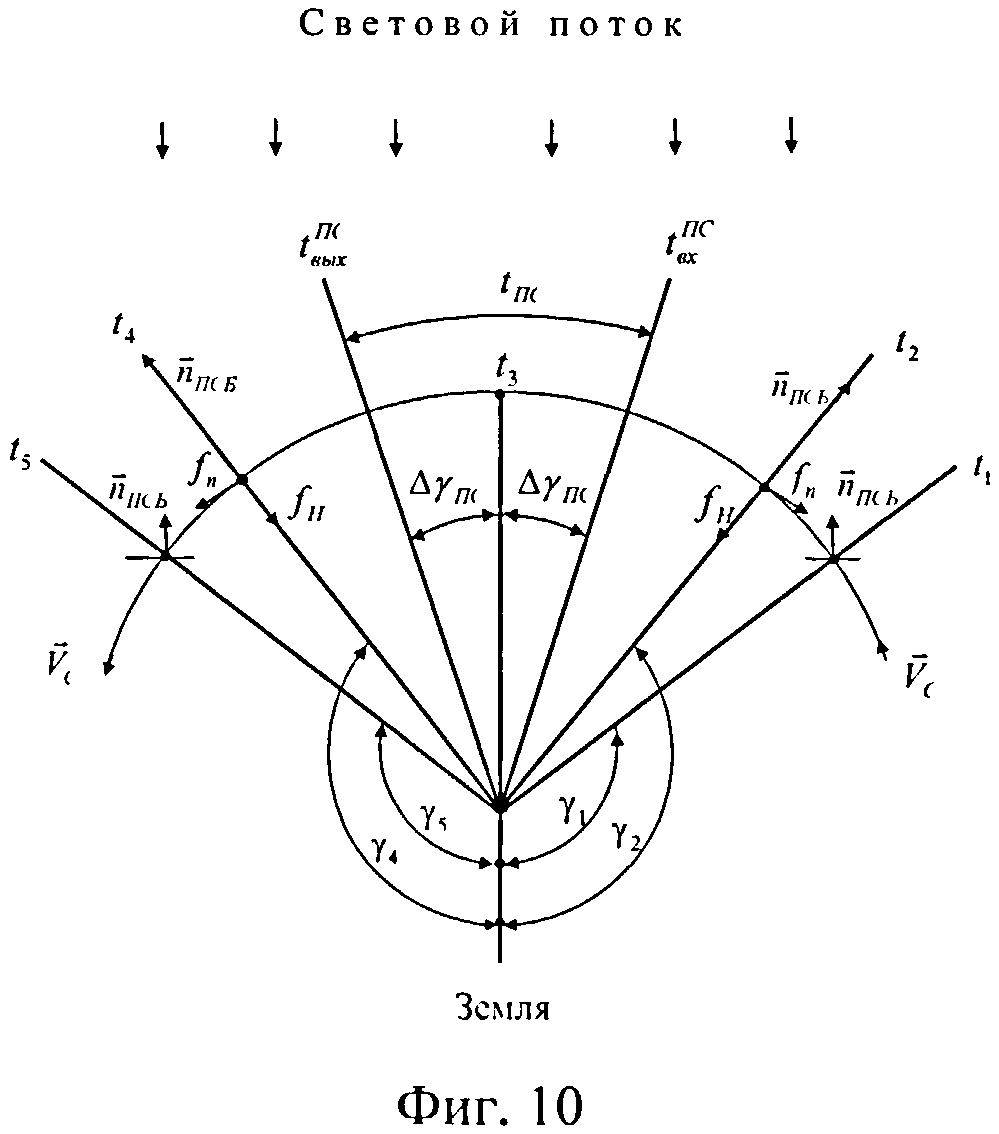
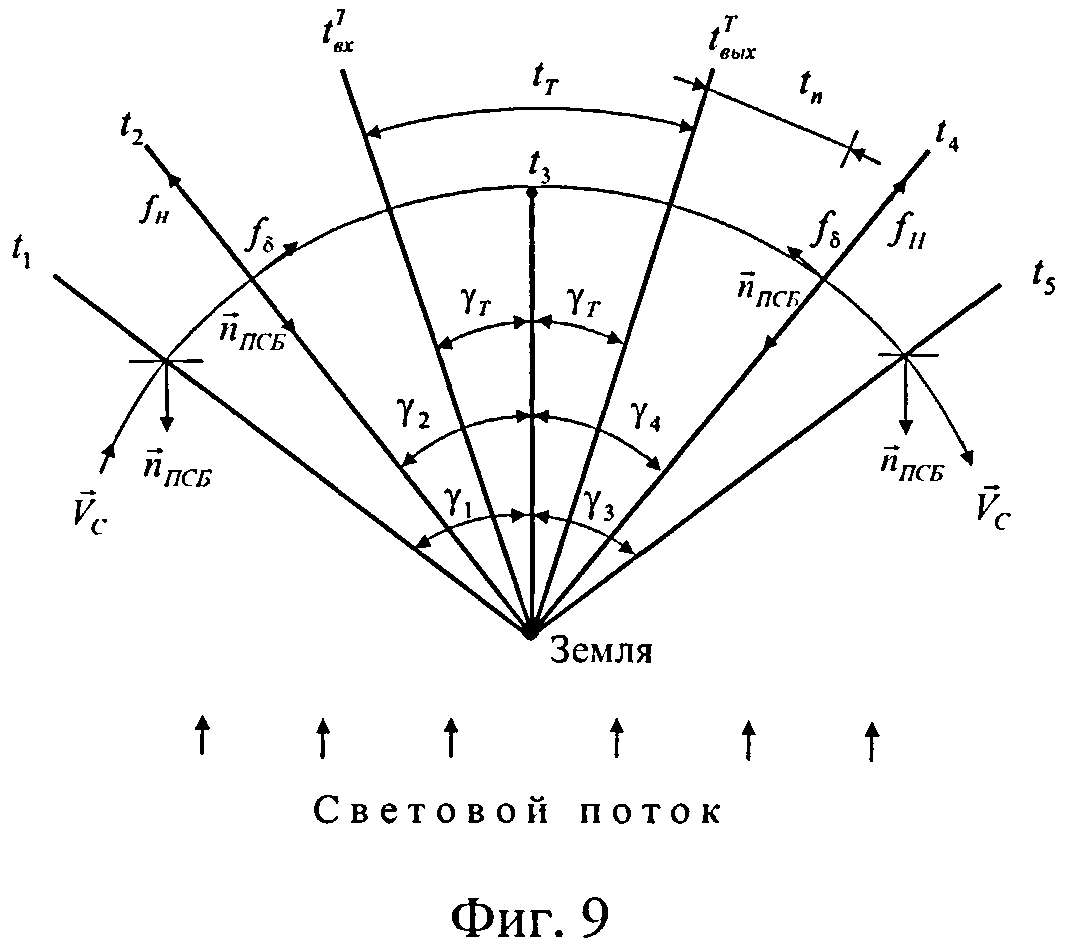
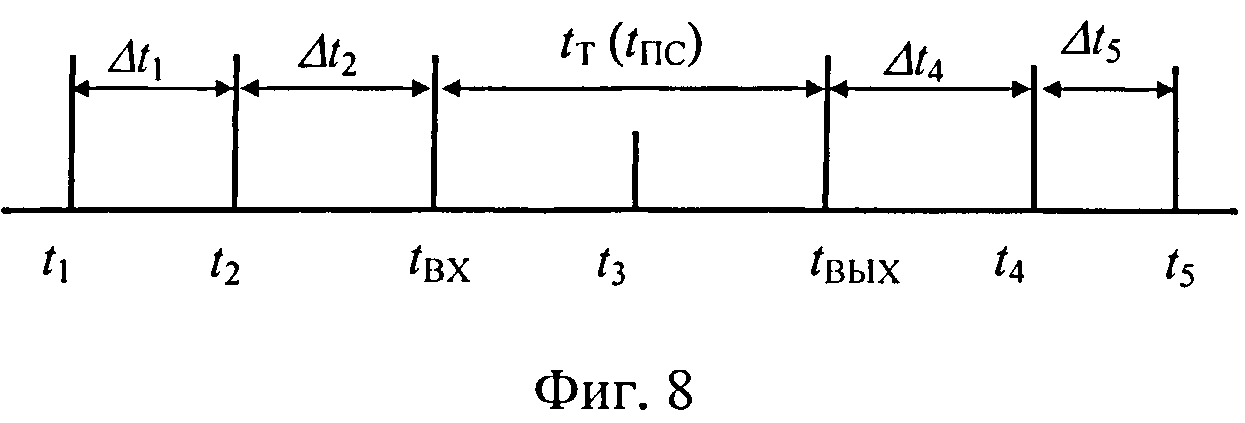
Расчет положений спутника на орбите, охватывающих интервалы неопределенности ориентации ПСБ и размещаемых симметрично относительно максимального и минимального значений углов СОЗ, может осуществляться с использованием следующих зависимостей (см. фиг.8-10):
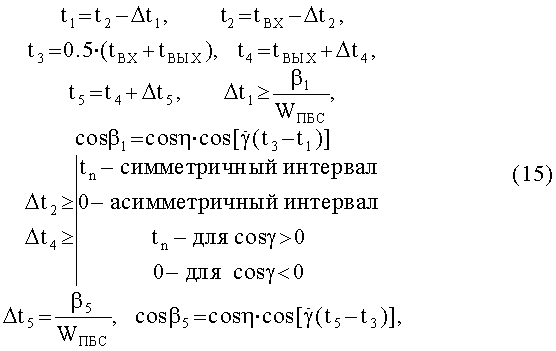
где tВХ, tВЫХ - моменты времени входа и выхода из тени Земли или из зоны неопределенности ориентации при малых углах СЗС (больших углах СОЗ); t1 - момент выдачи команды на установку ПСБ в ортогональное положение и блокировка штатной схемы слежения ПСБ за Солнцем по углу β1; t2 - момент фиксации ПСБ в ортогональном положении; t4 - момент снятия блокировки слежения ПСБ за Солнцем; t5 - начало штатного слежения ПСБ за Солнцем.
Команды управления режимами работы спутника, выдаваемые на моменты времени t1, t2, t4, t5, могут формироваться как от временной программы спутника, так и автономно.
Значения tВХ, tВЫХ,  , η определяются по общеизвестным уравнениям, на основании данных о параметрах орбиты спутника на начало каждого следующего витка и положения Солнца относительно плоскости орбиты.
, η определяются по общеизвестным уравнениям, на основании данных о параметрах орбиты спутника на начало каждого следующего витка и положения Солнца относительно плоскости орбиты.
Значение WПСБ определяется из конструктивных параметров системы ориентации данного спутника.
Наличие интервалов перехода от штатного слежения ПСБ к ортогональному ее положению (t2-t1, t5-t4) не вносит погрешности в расчеты. Составляющие сил светового давления по вектору скорости взаимно исключаются (ввиду симметрии), а по радиусу-вектору рассчитываются по формулам (12)…(13) при следующих условиях: φ=180°-β при cosγ≥0 и φ=β при cosγ<0, т.е. эти величины прогнозируемые.
Способ ориентации спутника в интервалах неопределенности, а именно ориентации антенн спутника на Землю, может быть реализован по двум схемам в зависимости от конструктивного исполнения спутника в части размещения излучательного радиатора системы терморегулирования.
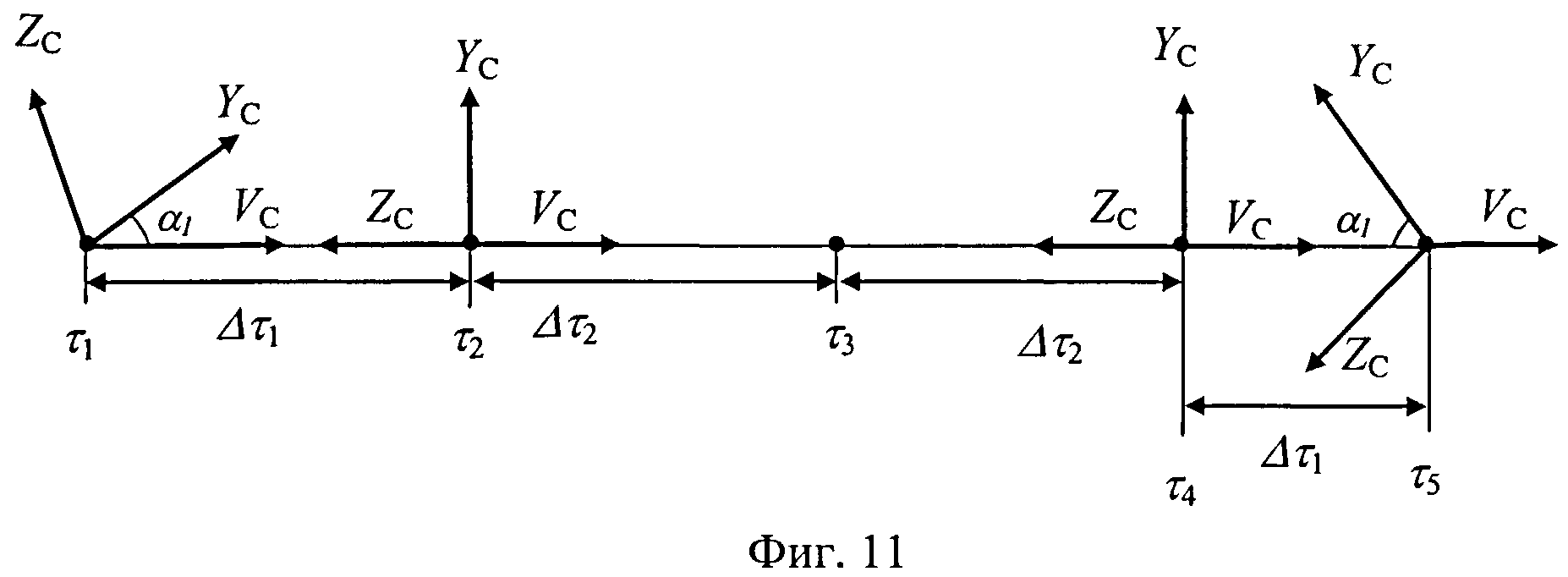
По первой схеме (см. фиг.11) упреждающий программный разворот вокруг первой оси спутника осуществляется до совмещения второй оси спутника с плоскостью орбиты с удержанием в этом положении и последующим совмещением второй оси спутника с нормалью к плоскости «Солнце - Спутник - Земля» на заданных интервалах орбиты, охватывающих интервалы неопределенности ориентации панелей солнечных батарей и расположенных симметрично относительно максимальных и минимальных значений углов «Солнце - Спутник - Земля». В этой схеме величина угла разворота в интервале τ1-τ2 и τ3-τ4 составляет α=90°|α1|, где α1 - значение угла α (формула (2)) на момент времени τ1. Вследствие выбранной схемы разворотов Солнце освещает поверхность спутника вне интервалов неопределенности только с одной стороны, совпадающей с положительным направлением оси YC. Это позволяет организовать радиационные поверхности спутника со стороны, совпадающей с отрицательным направлением оси YC, т.е. не освещаемой Солнцем.
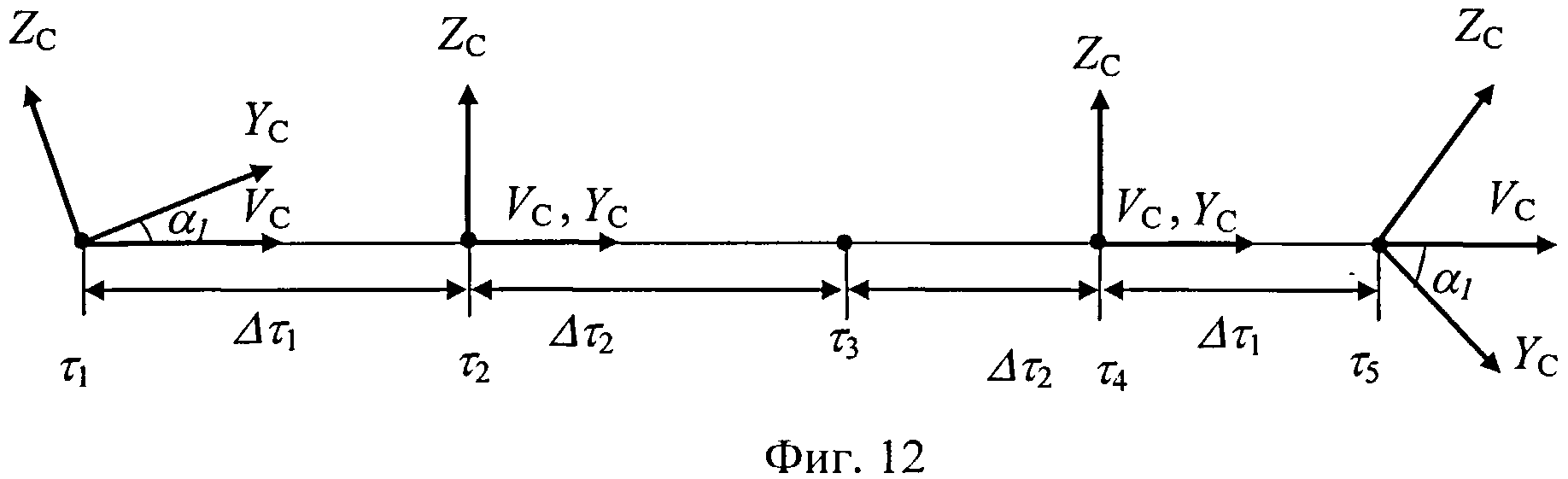
По второй схеме (см. фиг.12) упреждающий программный разворот вокруг первой оси спутника осуществляется до совмещения второй оси спутника с нормалью к плоскости орбиты с удержанием в этом положении и последующим совмещением второй оси спутника с нормалью к плоскости «Солнце - Спутник - Земля» на заданных интервалах орбиты, охватывающих интервалы неопределенности ориентации панелей солнечных батарей и расположенных симметрично относительно максимальных и минимальных значений углов «Солнце - Спутник - Земля». В этой схеме величина угла разворота в интервале τ1-τ2 и τ3-τ4 составляет αРАЗ=|α1|. Вследствие выбранной схемы разворотов Солнце освещает поверхность спутника вне интервалов неопределенности первой половины витка со стороны положительного направления оси YC, а вторую половину витка - со стороны отрицательного направления оси YC, что делает нецелесообразным организацию радиационных поверхностей спутника на этих сторонах спутника, т.к. они освещаются Солнцем.
Расчет положений спутника на орбите, охватывающих интервалы неопределенности положения фазовых центров антенн и размещаемых симметрично относительно максимального и минимального значений углов СОЗ, может осуществляться с использованием следующих зависимостей (фиг.11, 12):
τ1=τ2-Δτ1; τ2=τ3-Δτ2; τ4=τ1+Δτ2; τ5=τ4+Δτ1
где α1 - значение угла α на момент времени τ1, рассчитываемой по формуле (2), Δτ2 - длительность фиксированного положения, задаваемая из технических возможностей контура управления, Δτ2≥0.
Команды управления режимами работы спутника, выдаваемые на моменты времени τ1, τ2, τ4, τ5, могут формироваться как от временной программы спутника, так и автономно.
Значения τ3,  , η, θ определяются по общеизвестным уравнениям на основании данных о параметрах орбиты спутника на начало каждого следующего витка и положения Солнца относительно плоскости орбиты, положения потребителя в географической системе координат.
, η, θ определяются по общеизвестным уравнениям на основании данных о параметрах орбиты спутника на начало каждого следующего витка и положения Солнца относительно плоскости орбиты, положения потребителя в географической системе координат.
Значение WП1, l0 определяется из конструктивных параметров данного спутника. Наличие интервалов перехода от штатной ориентации спутника к ортогональному положению его осей относительно плоскости орбиты (τ2-τ1, τ5-τ4) не вносит погрешности в расчеты. Расчет поправок дальности на этих интервалах проводится потребителями по формулам (14) при известном положении потребителя относительно спутника (угол θ) и известным (прогнозируемым) законом изменения угла программного разворота спутника вокруг первой оси (угол α).
Таким образом, техническим результатом заявленного способа является:
- повышение точности прогнозирования движения спутника на теневых орбитах вследствие снижения непрогнозируемых составляющих ускорения от сил светового давления;
- повышение точности измерения дальности вследствие снижения непрогнозируемых значений углов разворота спутника вокруг первой оси.
Источники информации
1. Чеботарев В.Е. Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие/В.Е.Чеботарев, В.Е.Косенко; Сиб. гос. аэрокосмич. ун-т. - Красноярск, 2011. - 488 с.[24] с ил.
2. Эльясберг П.Е. Введение в теорию полета ИСЗ. - 2-е изд. - М.: Либроком, 2011. - 544 с.
3. w.w.w.elsevier.com/locate/asr. The GLONASS - М satellite yaw-attitude model/. F.Dilssner, T.Springer, G.Gienger, I.Dow. ESOC, 2010.
Гайковерт
Способ изоляции поверхностей деталей, не подлежащих анодному окислению
Космический аппарат
Частотно-фазовая система регулирования скорости вращения электродвигателя
Датчик постоянного тока с развязкой
Многофункциональный композиционный материал
Быстрозажимной цанговый патрон
Циклотронный плазменный двигатель
Космический измеритель приращения скорости
Устройство обнаружения и коррекции ошибок в параллельной магистрали
Гайковерт
Способ изоляции поверхностей деталей, не подлежащих анодному окислению
Космический аппарат
Частотно-фазовая система регулирования скорости вращения электродвигателя
Датчик постоянного тока с развязкой
Многофункциональный композиционный материал
Быстрозажимной цанговый патрон
Циклотронный плазменный двигатель
Космический измеритель приращения скорости
Устройство обнаружения и коррекции ошибок в параллельной магистрали

