СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и к модулю для управления скоростью транспортного средства на основании его спрогнозированной скорости согласно вводной части независимых пунктов формулы изобретения.
Уровень техники
Современные традиционные системы автоматического поддержания скорости (круиз-контроль) поддерживают постоянную опорную скорость, которую обычно устанавливает водитель. Значение опорной скорости изменяется только тогда, когда сам водитель подстраивает ее при вождении. Опорная скорость затем передается системе управления, которая управляет транспортным средством так, чтобы транспортное средство поддерживало опорную скорость, если это возможно. Если транспортное средство оснащено автоматической системой переключения передач, то ее передачи изменяются так, что она может поддерживать желательную скорость.
Когда система автоматического поддержания скорости используется на холмистой местности, то система автоматического поддержания скорости пытается поддерживать установленную скорость как на подъеме, так и на спуске. Это иногда приводит к ускорению транспортного средства после переезда через вершину холма и, возможно, при последующем спуске, на котором оно затем должно быть приторможено во избежание превышения установленной скорости, что является неэкономичным с точки зрения расхода топлива способом эксплуатации транспортного средства. Даже в тех случаях, когда транспортное средство не ускоряется после переезда через вершину, само собой разумеется, что транспортному средству может потребоваться торможение на спуске во избежание превышения установленной скорости.
Для уменьшения расхода топлива, в частности, на холмистых дорогах были разработаны экономичные системы автоматического поддержания скорости, такие как, например, система Ecocruise® фирмы «Скания» (Scania). Система автоматического поддержания скорости пытается оценить текущую скорость транспортного средства и также имеет сведения о предыстории сопротивления движению. Экономичная система автоматического поддержания скорости также может быть обеспечена картографическими данными с топографической информацией. В этом случае определяют местоположение транспортного средства на карте, например, посредством Глобальной системы определения местоположения (GPS), и оценивают сопротивление движению впереди по маршруту. Таким образом, опорная скорость транспортного средства может быть оптимизирована для различных типов дороги для экономии топлива.
Пример системы автоматического поддержания скорости, в которой используют топографическую информацию, описан в документе, озаглавленном «Explicit use of road topography for model predictive cruise control in heavy trucks», Erik Hellström, ISRN: LiTH-ISY-EX-05/3660-SE. Здесь автоматическое поддержание скорости реализовано на основе оптимизации в реальном масштабе времени, и для задания критериев оптимизации использована функция стоимости. Производят вычисление и оценку большого количества различных решений, и используют решение, приводящее к наименьшей стоимости. Значительное количество задействованных вычислений вызывает необходимость использования для этой цели процессора с соответственно большой производительностью.
В других формах системы автоматического поддержания скорости количество возможных решений сокращают за счет того, что вместо этого выбрано выполнение итераций из одного решения по запланированному пути транспортного средства. Однако топография проезжей части, масса транспортного средства и характеристики двигателя могут приводить к расхождениям относительно требуемой производительности процессора для определения опорной скорости. Например, в случае тяжелогруженого грузовика с умеренно высокой мощностью двигателя, движущегося по холмистой дороге, требуется больше вычислений, чем в случае легкогруженого грузовика с высокой мощностью двигателя, движущегося по относительно ровной дороге. Это объясняется тем, что в первом случае грузовик, вероятно, ускоряется на каждом спуске и замедляется на каждом подъеме, тогда как во втором случае грузовик будет двигаться почти равномерно.
Следовательно, к процессору, входящему в состав системы, предъявляются относительно высокие требования, поскольку нагрузка на процессор может сильно изменяться в зависимости от ситуации. Например, его производительность должна быть достаточно высокой для того, чтобы быстро справиться с теми ситуациями, когда необходимо выполнить большое количество вычислений. Следовательно, она должна быть рассчитана так, чтобы справиться с такими ситуациями, несмотря на то, что они возникают только лишь в течение ограниченной доли используемого времени процессора.
Задача настоящего изобретения состоит в том, чтобы предложить такую усовершенствованную систему для управления скоростью транспортного средства, чтобы можно было минимизировать объем используемого топлива, и, в частности, таким образом, чтобы нагрузка на процессор стала меньшей и более равномерной. Дополнительная задача настоящего изобретения состоит в том, чтобы предложить упрощенную систему автоматического поддержания скорости, имеющую прогнозируемое поведение по сравнению с другими экономичными системами автоматического поддержания скорости.
Сущность изобретения
По меньшей мере одна из вышеупомянутых задач достигнута посредством способа для управления скоростью транспортного средства, который содержит этапы, на которых:
- принимают желательную скорость vset для транспортного средства;
- посредством картографических данных и данных местоположения определяют горизонт для запланированного пути, который составлен из сегментов маршрута по меньшей мере с одной характеристикой для каждого сегмента;
- во время каждого из некоторого количества циклов (s) моделирования, каждый из которых содержит некоторое количество N шагов моделирования, выполняемых с предопределенной частотой f, осуществляют следующее:
- делают первое прогнозирование скорости vpred_cc транспортного средства по горизонту с использованием обычной системы автоматического поддержания скорости, когда в качестве опорной скорости подана vset, причем прогнозирование зависит от характеристик упомянутого сегмента;
- сравнивают спрогнозированную скорость vpred_cc транспортного средства с vmin и vmax, которые разграничивают диапазон, в пределах которого запланирована скорость транспортного средства;
- делают второе прогнозирование скорости vpred_Tnew транспортного средства по горизонту, когда крутящий момент T двигателя транспортного средства представляет собой значение, которое зависит от результата упомянутого сравнения в последнем предыдущем цикле (s-1) моделирования;
- определяют по меньшей мере одно опорное значение, которое на основании по меньшей мере одного из упомянутых сравнений в этом цикле (s) моделирования и спрогнозированной (скорости) vpred_Tnew транспортного средства указывает, как следует воздействовать на скорость транспортного средства;
- отправляют системе управления в транспортном средстве упомянутое по меньшей мере одно опорное значение, относительно которого затем регулируют транспортное средство.
Согласно другому аспекту, эта задача или задачи достигнуты посредством модуля для управления скоростью транспортного средства, который содержит блок ввода, приспособленный для приема желательной скорости vset для транспортного средства, блок горизонта, приспособленный для определения посредством картографических данных и данных местоположения горизонта для запланированного пути, который составлен из сегментов маршрута по меньшей мере с одной характеристикой для каждого сегмента, и вычислительный блок, приспособленный для осуществления следующего во время каждого из некоторого количества циклов (s) моделирования, каждый из которых содержит некоторое количество N шагов моделирования, выполняемых с предопределенной частотой f,
- делают первое прогнозирование скорости vpred_cc транспортного средства по горизонту с использованием обычной системы автоматического поддержания скорости, когда в качестве опорной скорости подана vset, причем прогнозирование зависит от характеристик упомянутого сегмента;
- сравнивают спрогнозированную скорость vpred_cc транспортного средства с vmin и vmax, которые ограничивают диапазон, в пределах которого запланирована скорость транспортного средства;
- делают второе прогнозирование скорости vpred_Tnew транспортного средства по горизонту, когда крутящий момент T двигателя транспортного средства представляет собой значение, которое зависит от результата упомянутого сравнения в последнем предыдущем цикле (s-1) моделирования;
- определяют по меньшей мере одно опорное значение, которое указывает, как на основании по меньшей мере одного из упомянутых сравнений в этом цикле (s) моделирования и спрогнозированной (скорости) vpred_Tnew транспортного средства следует воздействовать на скорость транспортного средства. Этот модуль дополнительно приспособлен для отправки системе управления в транспортном средстве упомянутого по меньшей мере одного опорного значения, относительно которого затем регулируют транспортное средство.
Описанный способ приводит, по существу, к постоянной нагрузке на процессор, поскольку во время каждого цикла моделирования делают одинаковое количество прогнозирований с постоянной частотой. Нагрузка на процессор не зависит от выходной мощности двигателя транспортного средства, массы транспортного средства и топографии маршрута. Таким образом, рассматриваемый процессор имеет сведения о том, какая производительность процессора будет необходима, которую, следовательно, сообразно распределить. Таким образом, нагрузка на процессор будет одинаковой в различных ситуациях изменения топологии и не будет зависеть от крутящего момента двигателя транспортного средства. Таким образом, производительность рассматриваемого процессора также может быть рассчитана без необходимости учета каких-либо экстремальных наихудших сценариев, а, наоборот, с учетом равномерной нагрузки на процессор. Следовательно, может быть уменьшена стоимость процессора.
Изменения скорости впереди по горизонту прогнозируют только для двух различных режимов вождения транспортного средства, что приводит к относительно малой нагрузке на процессор. В этом случае опорное значение, к которому необходимо стремиться, выбирают на основании результата спрогнозированных режимов вождения. Путем прогнозирования скорости транспортного средства при каком-либо ином крутящем моменте, например минимальном или максимальном крутящем моменте, можно оценить, необходимо ли стремиться к некоторому крутящему моменту для транспортного средства. Согласно варианту осуществления изобретения то, что подают, представляет собой vset, максимальный крутящий момент или минимальный крутящий момент. Опорное значение, к которому стремятся, не изменяют, если скорость vpred_cc остается в рамках некоторых пределов.
Предпочтительные варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения и в подробном описании.
Краткое описание приложенных чертежей
Ниже приведено описание изобретения со ссылкой на приложенные чертежи, на которых изображено следующее:
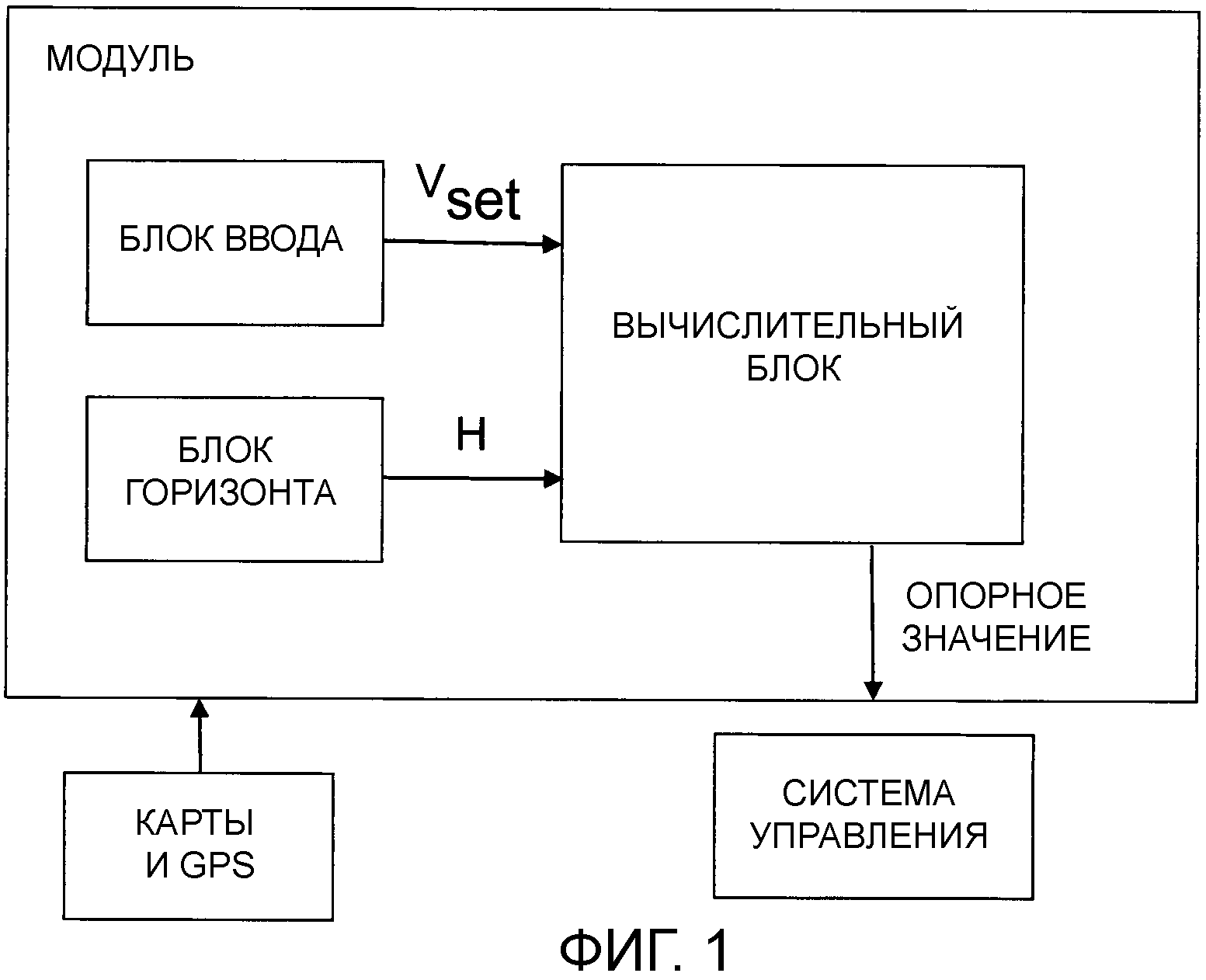
на фиг.1 изображен модуль согласно варианту осуществления настоящего изобретения.
На фиг.2 изображена схема последовательности способа согласно варианту осуществления настоящего изобретения.
На фиг.3 проиллюстрирована спрогнозированная скорость во время цикла моделирования согласно варианту осуществления настоящего изобретения.
На фиг.4 проиллюстрировано некоторое количество циклов моделирования согласно варианту осуществления настоящего изобретения.
На фиг.5 проиллюстрированы спрогнозированные скорости транспортного средства согласно варианту осуществления настоящего изобретения.
На фиг.6 изображена схема последовательности операций способа согласно другому варианту осуществления настоящего изобретения.
На фиг.7 проиллюстрирован альтернативный вариант осуществления настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.1 изображен модуль для управления скоростью транспортного средства согласно варианту осуществления настоящего изобретения. Этот модуль содержит блок ввода, приспособленный для получения желательной скорости vset для транспортного средства. Водитель может, например, устанавливать желательную скорость vset, которую поддерживало бы транспортное средство по его или ее желанию. Модуль также содержит блок горизонта, приспособленный для определения горизонта для запланированного пути посредством картографических данных и данных местоположения. Горизонт составлен из сегментов маршрута по меньшей мере с одной характеристикой для каждого сегмента. Примером характеристик сегмента может являться его уклон в радианах.
В описании настоящего изобретения указана Глобальная система определения местоположения (GPS) для определения данных местоположения для транспортного средства, но следует понимать, что также возможны другие виды глобальных или региональных систем позиционирования для предоставления в транспортное средство данных местоположения, например системы, в которых для определения местоположения транспортного средства используют радиоприемник. В транспортном средстве также могут использоваться датчики для сканирования окрестностей и для определения посредством этого его местоположения.
На фиг.1 проиллюстрировано то, как модуль воспринимает информацию о запланированном пути посредством карт (картографических данных) и GPS (данных местоположения). Путь передают побитно в модуль, например, через CAN. Модуль может быть отдельным от или формировать часть системы или систем управления, которые должны использовать опорные значения для регулирования. Примером системы управления является система управления двигателем транспортного средства. В качестве альтернативы карта и блок системы позиционирования также могут являться частью системы, которая должна использовать опорные значения для регулирования. В модуле биты собирают вместе в блоке горизонта для формирования горизонта и обрабатывают процессором для создания внутреннего горизонта, относительно которого система управления может регулироваться. Затем горизонт непрерывно дополняется новыми битами из GPS и блока картографических данных для поддержания желательной длины горизонта. Таким образом, горизонт непрерывно обновляют, когда транспортное средство находится в движении.
CAN (локальная сеть контроллеров) представляет собой систему последовательной шины, специально разработанную для использования в транспортных средствах. Шина данных CAN обеспечивает возможность обмена цифровыми данными между датчиками, регулирующими компонентами, приводами, управляющими устройствами и т.д. и гарантирует, что два или более управляющих устройств могут осуществлять доступ к сигналам от заданного датчика для того, чтобы использовать их для управления компонентами, соединенными с ними.
Модуль также содержит вычислительный блок, приспособленный для того, чтобы во время каждого из некоторого количества циклов (s) моделирования каждый из которых содержит некоторое количество N шагов моделирования, выполняемых с предопределенной частотой f, сделать первое прогнозирование скорости vpred_cc транспортного средства по горизонту с использованием обычной системы автоматического поддержания скорости, когда в качестве опорной скорости подана vset, причем прогнозирование зависит от характеристик упомянутого сегмента. Вычисленную скорость vpred_cc транспортного средства сравнивают с vmin и vmax, которые разграничивают диапазон, в пределах которого запланирована скорость транспортного средства, и делают второе прогнозирование скорости vpred_Tnew транспортного средства по горизонту, когда крутящий момент T двигателя транспортного средства представляет собой значение, которое зависит от результата упомянутого сравнения в последнем предыдущем цикле (s-1) моделирования. Определяют по меньшей мере одно опорное значение, которое, на основании по меньшей мере одного из упомянутых сравнений в этом цикле (s) моделирования и спрогнозированной скорости vpred_Tnew транспортного средства, указывает, как следует воздействовать на скорость транспортного средства. Модуль дополнительно приспособлен для отправки системе управления в транспортном средстве упомянутого по меньшей мере одного опорного значения, относительно которого затем регулируют транспортное средство. Более подробное объяснение того, как делают прогнозирования, приведено ниже.
Модуль и/или вычислительный блок содержат, по меньшей мере, процессор и память, приспособленные для выполнения всех описанных в данном документе вычислений, прогнозирований и т.д.
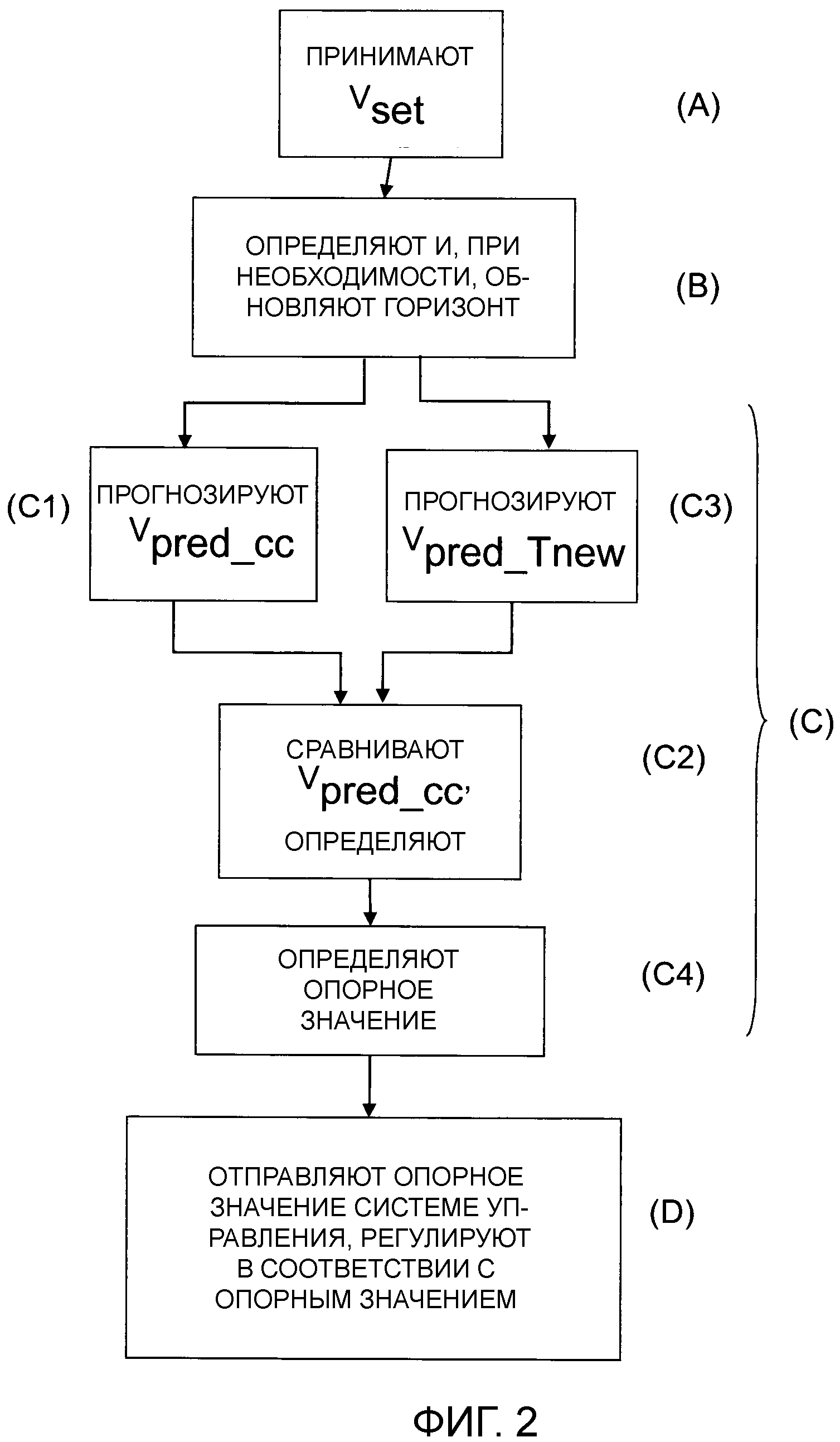
На фиг.2 изображена схема последовательности этапов, вовлеченных в способ для управления скоростью транспортного средства согласно варианту осуществления изобретения. Способ содержит в качестве первого этапа этап A), при котором принимают vset в качестве желательной скорости транспортного средства для поддержания, и в качестве второго этапа этап B), при котором посредством картографических данных и данных местоположения определяют горизонт для запланированного пути, составленного из сегментов маршрута по меньшей мере с одной характеристикой для каждого сегмента. Согласно способу затем выполняют некоторое количество циклов (s) моделирования во время длины горизонта. Цикл (s) моделирования содержит C) некоторое количество N шагов моделирования, выполняемых с предопределенной частотой f, и влечет за собой C1) где делают первое прогнозирование скорости vpred_cc транспортного средства по горизонту с использованием обычной системы автоматического поддержания скорости, когда в качестве опорной скорости подана vset, причем прогнозирование зависит от характеристик упомянутого сегмента, C2) где сравнивают спрогнозированную скорость vpred_cc транспортного средства с vmin и vmax, которые разграничивают диапазон, в пределах которого запланирована скорость транспортного средства, C3) где делают второе прогнозирование скорости vpred_Tnew транспортного средства по горизонту, когда крутящий момент T двигателя транспортного средства представляет собой значение, которое зависит от результата упомянутого сравнения в последнем предыдущем цикле (s-1) моделирования, и C4) где определяют по меньшей мере одно опорное значение, которое, на основании, по меньшей мере, некоторых из упомянутых сравнений в этом цикле (s) моделирования и спрогнозированной скорости vpred_Tnew транспортного средства, указывает, как следует воздействовать на скорость транспортного средства. В качестве дополнительного этапа D) упомянутое по меньшей мере одно опорное значение, относительно которого следует отрегулировать транспортное средство, отправляют системе управления в транспортном средстве. В этом способе добиваются постоянной и предопределенной нагрузки на процессор при определении и регулировке опорной скорости транспортного средства.
Во время цикла (s) моделирования прогнозирование согласно C1) и прогнозирование согласно C3) делают параллельно, как проиллюстрировано на фиг.2. Результат сравнения vpred_cc с vmin и vmax в последнем предыдущем цикле (s-1) моделирования определяет крутящий момент T, при котором должна быть спрогнозирована vpred_Tnew в цикле (s) моделирования. Например, если каждый цикл моделирования содержит 100 шагов моделирования с частотой 100 Гц, то каждый цикл моделирования занимает 1 секунду.
Следовательно, vset представляет собой входной сигнал водителя желательной скорости системы автоматического поддержания скорости, а опорное значение представляет собой значение, относительно которого регулируют транспортное средство. Опорным значением предпочтительно является любое из: опорной скорости vref транспортного средства, опорного крутящего момента Tref или опорной частоты ωref вращения двигателя. vref подают в регулятор скорости блока управления двигателем. Для традиционных систем автоматического поддержания скорости vref=vset. В этом случае регулятор скорости управляет скоростью транспортного средства в соответствии с vref, требуя обеспечения необходимого крутящего момента от регулятора крутящего момента двигателя. Когда вместо этого опорным значением является опорный крутящий момент Tref, то Tref может быть отправлен непосредственно в регулятор крутящего момента двигателя, а когда опорным значением является опорная частота ωref вращения двигателя, то ωref может быть отправлена непосредственно в регулятор скорости двигателя. Если vpred_cc при сравнении с vmin и vmax не выходит за эти пределы, то, согласно варианту осуществления изобретения, в качестве опорного значения подают vset. В этом случае опорное значение полностью зависит от этого сравнения. Ниже приведено объяснение того, какому опорному значению следуют в других случаях.
Теперь будет объяснено то, как получают различные спрогнозированные скорости.
Суммарная сила  , действующая на транспортное средство со стороны окружающей среды, состоит из сопротивления
, действующая на транспортное средство со стороны окружающей среды, состоит из сопротивления  качению, силы
качению, силы  тяжести и аэродинамического сопротивления
тяжести и аэродинамического сопротивления  . Силу тяжести вычисляют следующим образом:
. Силу тяжести вычисляют следующим образом:
 , (1)
, (1)
где  - масса транспортного средства и
- масса транспортного средства и  - уклон дороги, выраженный в радианах. Поскольку обычно рассматриваются только лишь малые углы, то
- уклон дороги, выраженный в радианах. Поскольку обычно рассматриваются только лишь малые углы, то  аппроксимирован
аппроксимирован  . Аэродинамическое сопротивление вычисляют как коэффициент
. Аэродинамическое сопротивление вычисляют как коэффициент  , умноженный на квадрат скорости транспортного средства, следующим образом:
, умноженный на квадрат скорости транспортного средства, следующим образом:
 (2)
(2)
 , (3)
, (3)
где  - оцененная площадь лобовой поверхности транспортного средства,
- оцененная площадь лобовой поверхности транспортного средства,  - коэффициент сопротивления, который зависит от обтекаемой формы объекта,
- коэффициент сопротивления, который зависит от обтекаемой формы объекта,  - плотность воздуха и
- плотность воздуха и  - масса транспортного средства, оцененная его системой оценки массы как
- масса транспортного средства, оцененная его системой оценки массы как  . Текущее сопротивление
. Текущее сопротивление  качению также непрерывно оценивается в транспортном средстве как
качению также непрерывно оценивается в транспортном средстве как  . Для вычисления и , пожалуйста, см. публикацию диссертации, озаглавленной «Fuel Optimal Powertrain Control for Heavy Trucks Utilizing Look Ahead», Maria Ivarsson, Linkoping 2009, ISBN 978-91-7393-637-8.
. Для вычисления и , пожалуйста, см. публикацию диссертации, озаглавленной «Fuel Optimal Powertrain Control for Heavy Trucks Utilizing Look Ahead», Maria Ivarsson, Linkoping 2009, ISBN 978-91-7393-637-8.  представляет собой спрогнозированную скорость транспортного средства на предыдущем шаге моделирования.
представляет собой спрогнозированную скорость транспортного средства на предыдущем шаге моделирования.
Сила  , которая двигает транспортное средство вперед, зависит от сделанного прогнозирования. Согласно варианту осуществления изобретения в качестве нее берут либо максимально возможную мощность (максимальный крутящий момент), либо минимальную возможную мощность (минимальный крутящий момент, например, тормозящий момент). Однако может быть взята любая желательная сила в пределах диапазона
, которая двигает транспортное средство вперед, зависит от сделанного прогнозирования. Согласно варианту осуществления изобретения в качестве нее берут либо максимально возможную мощность (максимальный крутящий момент), либо минимальную возможную мощность (минимальный крутящий момент, например, тормозящий момент). Однако может быть взята любая желательная сила в пределах диапазона
 , (4)
, (4)
и, следовательно, скорость vpred_Tnew транспортного средства может быть спрогнозирована при крутящих моментах, отличных от максимального или минимального крутящего момента.  вычисляют как максимально доступный крутящий момент двигателя, зависящий от частоты вращения двигателя, умноженный на общее передаточное число и деленный на эффективный радиус
вычисляют как максимально доступный крутящий момент двигателя, зависящий от частоты вращения двигателя, умноженный на общее передаточное число и деленный на эффективный радиус  шины.
шины.  получают таким же самым образом как и , но с использованием взамен минимального крутящего момента:
получают таким же самым образом как и , но с использованием взамен минимального крутящего момента:
 (5)
(5)
 , (6)
, (6)
где  - частота вращения двигателя транспортного средства, а
- частота вращения двигателя транспортного средства, а  - общее передаточное число транспортного средства.
- общее передаточное число транспортного средства.
Ускорение  транспортного средства задается следующим уравнением:
транспортного средства задается следующим уравнением:
 (7)
(7)
Согласно варианту осуществления изобретения шаги моделирования во время цикла моделирования из N шагов имеют постоянную длину шага, которая зависит от скорости транспортного средства. Длина  каждого шага моделирования задается посредством:
каждого шага моделирования задается посредством:
 , (8)
, (8)
где  - постоянная времени, например, 0,9 с, а
- постоянная времени, например, 0,9 с, а  - преобладающая скорость транспортного средства в начале моделирования.
- преобладающая скорость транспортного средства в начале моделирования.
Время  для шага моделирования задается посредством:
для шага моделирования задается посредством:
 , (9)
, (9)
где  - спрогнозированная скорость на предыдущем шаге (
- спрогнозированная скорость на предыдущем шаге ( ) моделирования.
) моделирования.
Разность  скоростей равна:
скоростей равна:
 (10)
(10)
Расход энергии  для шага моделирования задается посредством:
для шага моделирования задается посредством:
 (11)
(11)
Скорость  на текущем шаге моделирования становится равной:
на текущем шаге моделирования становится равной:
 (12)
(12)
Общее время  для текущего шага моделирования равно:
для текущего шага моделирования равно:
 (13)
(13)
Общий расход энергии  для текущего шага моделирования равен:
для текущего шага моделирования равен:
 (14)
(14)
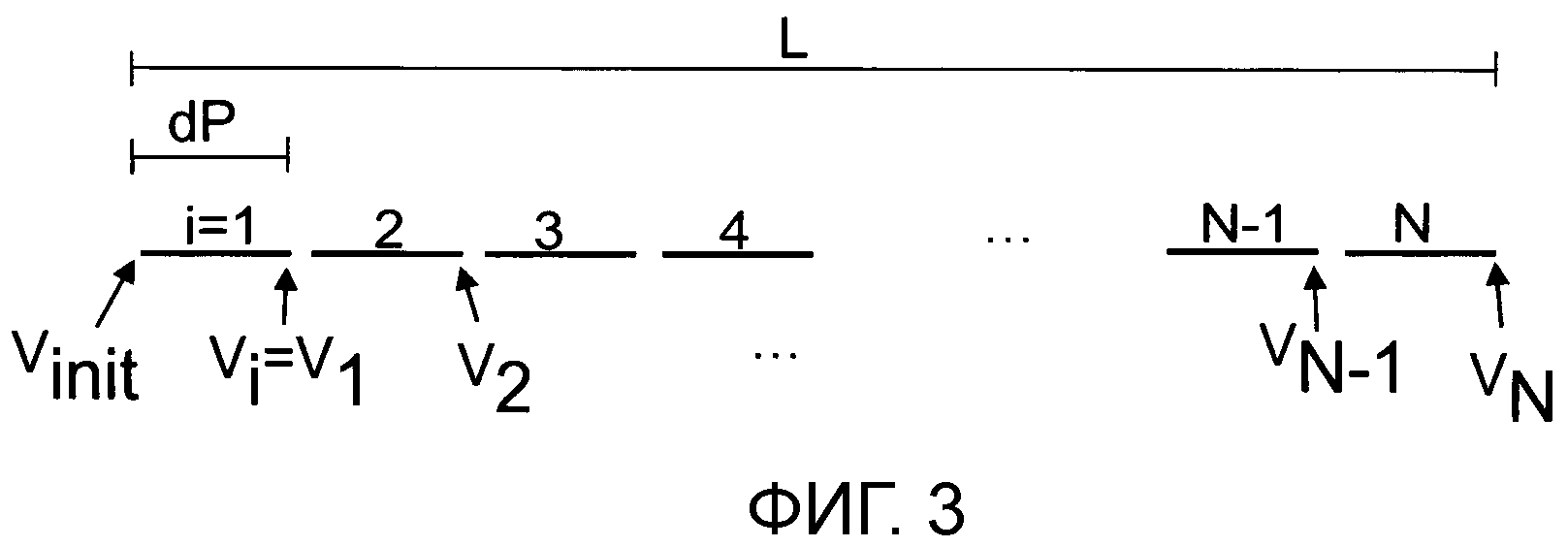
На фиг.3 проиллюстрировано то, как прогнозируют скорость транспортного средства во время цикла моделирования из N шагов моделирования с горизонтом, длина которого равна L метрам. Прогнозирование прекращают после N шагов моделирования, то есть после цикла моделирования. Затем начинается новый цикл моделирования в следующей временной выборке. Каждый цикл моделирования имеет предопределенную частоту f. Например, с частотой 100 Гц выполняют 100 шагов моделирования в секунду. Поскольку длина каждого шага моделирования зависит от скорости  транспортного средства в начале прогнозирования, длина спрогнозированной секции горизонта меняется со скоростью транспортного средства. Например, при 80 км/ч (22,22 м/с) горизонт становится имеющим длину 2 км, если f=100 Гц и K=0,9 с, поскольку в этом случае длина каждого шага
транспортного средства в начале прогнозирования, длина спрогнозированной секции горизонта меняется со скоростью транспортного средства. Например, при 80 км/ч (22,22 м/с) горизонт становится имеющим длину 2 км, если f=100 Гц и K=0,9 с, поскольку в этом случае длина каждого шага  моделирования становится равной 20 м, и через 100 шагов длина горизонта становится равной 2 км. На фиг.3 показана новая скорость
моделирования становится равной 20 м, и через 100 шагов длина горизонта становится равной 2 км. На фиг.3 показана новая скорость  , спрогнозированная на каждом
, спрогнозированная на каждом  -м шаге моделирования. Поскольку на каждом шаге моделирования делают одно и то же количество прогнозирований (vpred_cc и vpred_Tnew), то нагрузка на процессор полностью зависит от количества шагов моделирования в пределах горизонта. Количество шагов моделирования определяется частотой f, которая представляет собой предопределенное значение. Следовательно, максимальная нагрузка на процессор всегда может быть определена заранее, что является целесообразным, поскольку производительность процессора может быть, соответственно, рассчитана заранее. Следовательно, нагрузка на процессор не зависит от топографии дороги, от массы транспортного средства и от типа двигателя. vpred_cc и vpred_Tnew могут представлять собой векторы с N значениями, или в качестве альтернативы в каждом цикле моделирования сохраняют лишь максимальные и минимальные значения для vpred_cc и vpred_Tnew, как более подробно объяснено ниже.
-м шаге моделирования. Поскольку на каждом шаге моделирования делают одно и то же количество прогнозирований (vpred_cc и vpred_Tnew), то нагрузка на процессор полностью зависит от количества шагов моделирования в пределах горизонта. Количество шагов моделирования определяется частотой f, которая представляет собой предопределенное значение. Следовательно, максимальная нагрузка на процессор всегда может быть определена заранее, что является целесообразным, поскольку производительность процессора может быть, соответственно, рассчитана заранее. Следовательно, нагрузка на процессор не зависит от топографии дороги, от массы транспортного средства и от типа двигателя. vpred_cc и vpred_Tnew могут представлять собой векторы с N значениями, или в качестве альтернативы в каждом цикле моделирования сохраняют лишь максимальные и минимальные значения для vpred_cc и vpred_Tnew, как более подробно объяснено ниже.
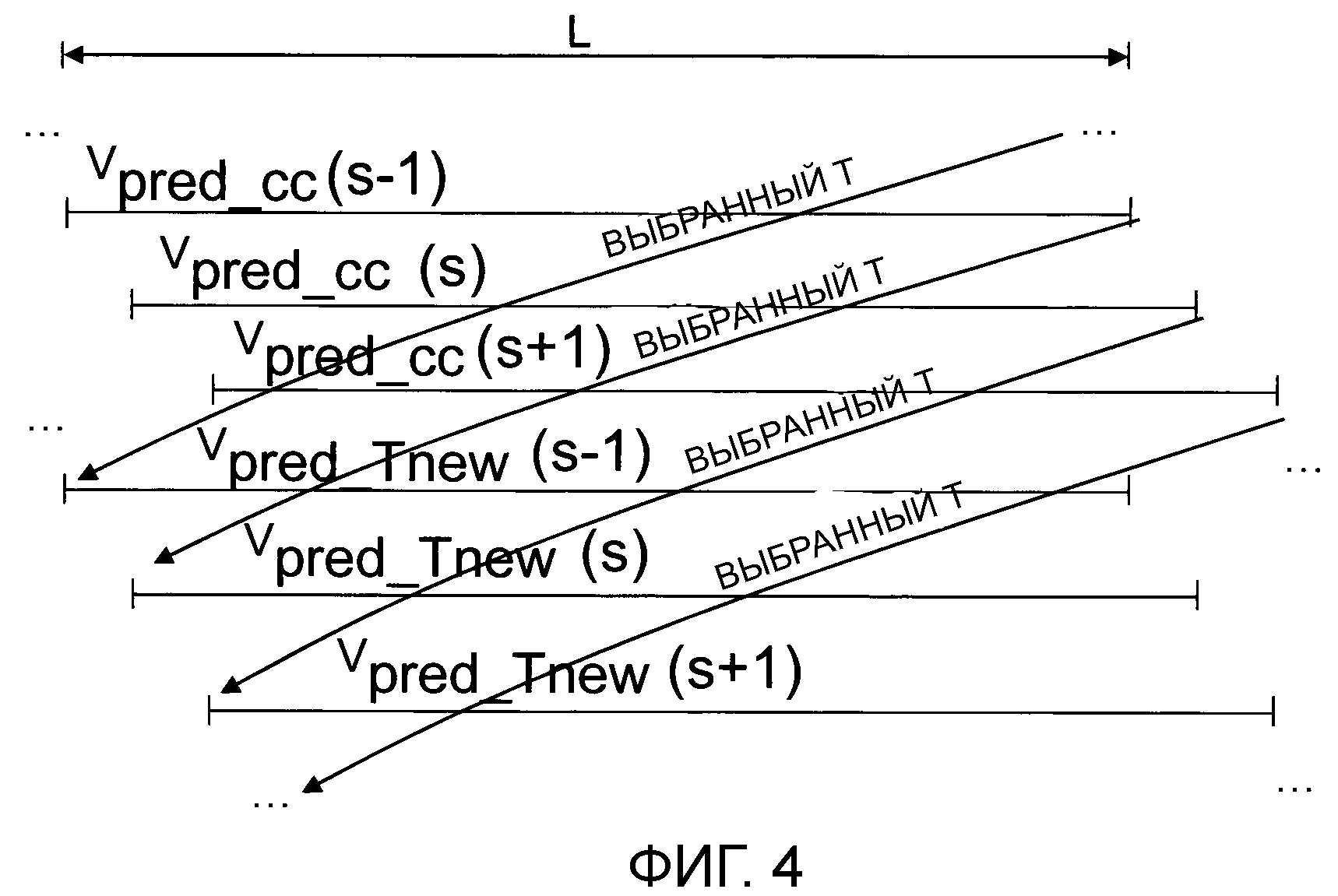
На фиг.4 проиллюстрированы три цикла (s-1), (s) и (s+1) моделирования и прогнозы, сделанные во время каждого цикла. В каждом цикле делают прогнозирование vpred_cc и прогнозирование vpred_Tnew. После каждого цикла vpred_cc сравнивают с vmin и vmax, и результат этого сравнения служит в качестве основания для определения предпочтительно крутящего момента T для vpred_Tnew для следующего цикла, как объяснено выше и проиллюстрировано на фиг.4 стрелками, обозначенными «ВЫБРАННЫЙ T». Это проиллюстрировано на схеме последовательности операций, показанной на фиг.2, как этап C2. Таким образом, во время каждого цикла моделирования прогнозируют две различных скорости транспортного средства. Согласно варианту осуществления изобретения после цикла моделирования vpred_Tnew сравнивают с vmin и vmax, и если vpred_Tnew ниже, чем vmin, или выше, чем vmax, то управление транспортным средством необходимо осуществлять по vset. Если vpred_Tnew≥vmin и ≤vmax, то взамен управление транспортным средством необходимо осуществлять по крутящему моменту, определенному для vpred_Tnew. Таким образом, каждый цикл моделирования сопровождается определением того, какой именно параметр, vpred_cc или vpred_Tnew, должен влиять на скорость транспортного средства. В этом случае в блок управления подают опорные значения, представляющие определенные скорости, которыми, следовательно, может являться любое из: опорной скорости транспортного средства, опорного крутящего момента или опорной частоты вращения двигателя.
Таким образом, опорные значения, к которым должна стремиться система управления транспортного средства, определяют непрерывно, когда транспортное средство находится в движении. Их предпочтительно определяют, начиная с некоторого предопределенного расстояния перед транспортным средством, и затем синхронизируют в блоке управления, чтобы вычисленное опорное значение для конкретной ситуации было установлено в нужный момент времени. Примером такого расстояния является расстояние 50 метров, которое затем учитывает блок управления при регулировании транспортного средства.
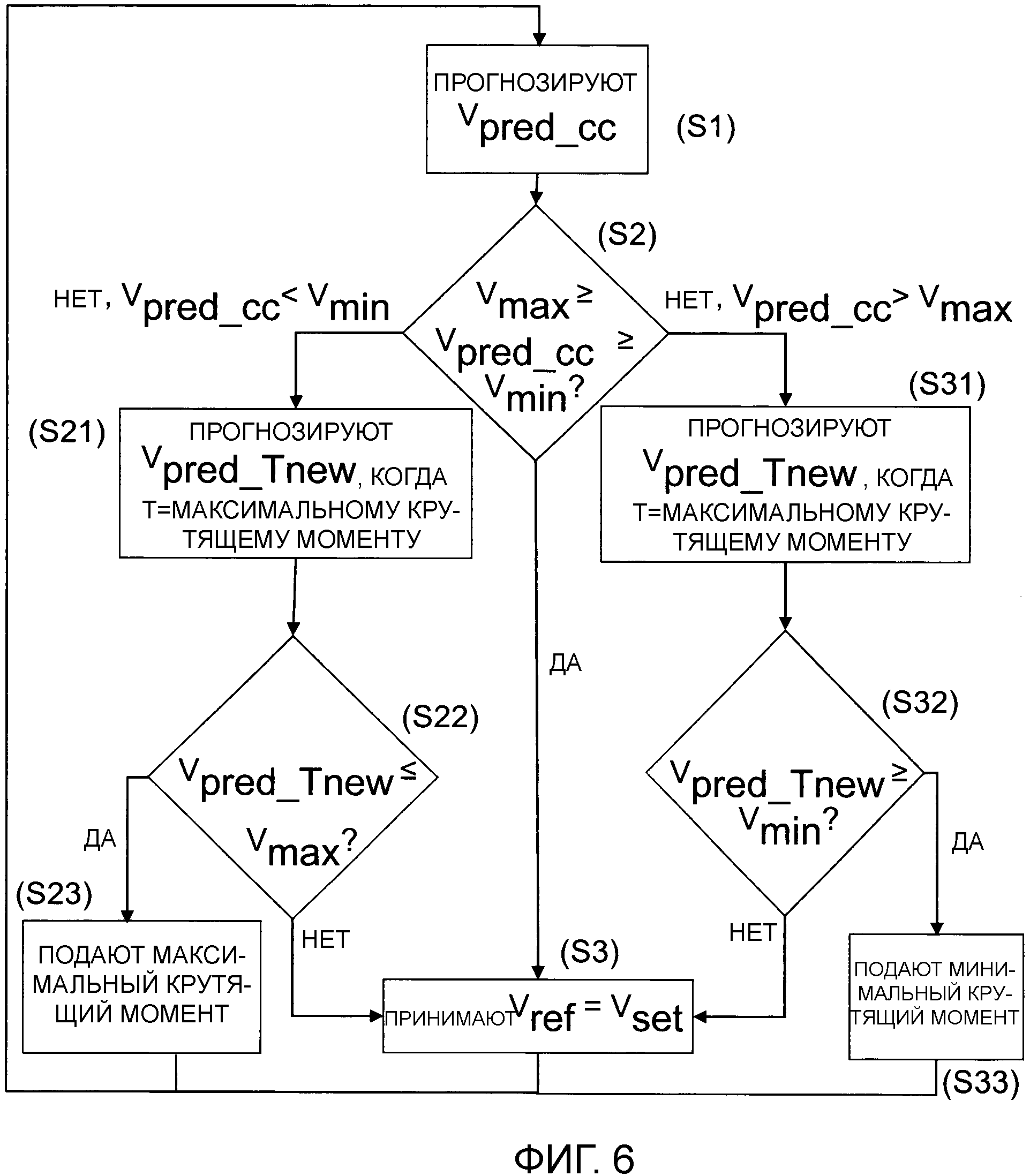
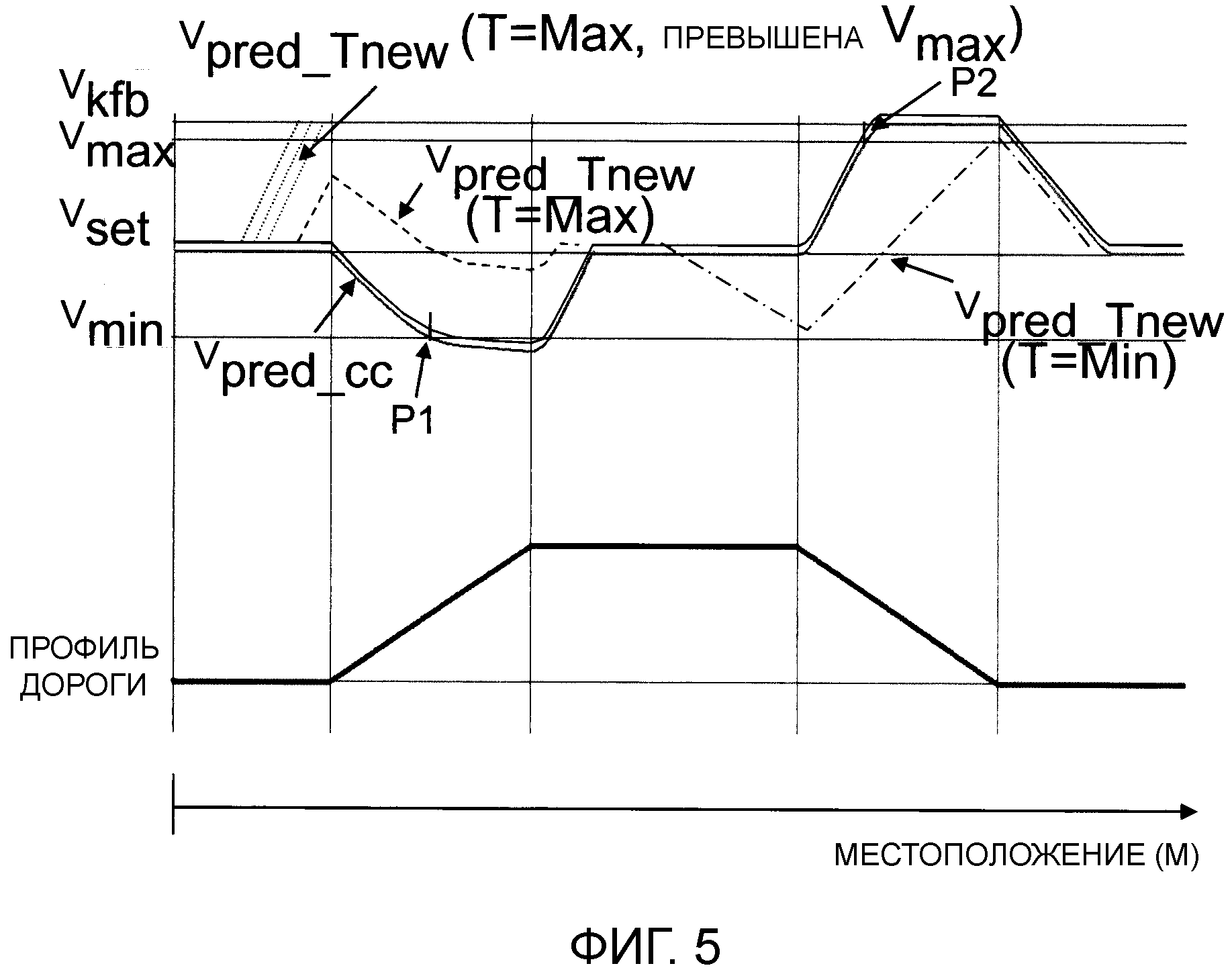
Теперь будет приведено объяснение варианта осуществления настоящего изобретения со ссылкой на фиг.5 и фиг.6. В верхней части фиг.5 проиллюстрирована спрогнозированная скорость vpred_cc при использовании обычной системы автоматического поддержания скорости вдоль горизонта с профилем дороги, который изображен в нижней части схемы. На схеме последовательности операций, изображенной на фиг.6, показано, как прогнозируют vpred_cc в качестве первого этапа S1. После того как vpred_cc была четко спрогнозирована в течение N шагов, при следующем этапе S2 ее сравнивают с vmin и vmax, что проиллюстрировано на чертеже. Если vpred_cc ниже, чем vmin, то идентифицируют подъем. Если vpred_cc выше, чем vmax, то идентифицируют спуск. Если идентифицирован подъем, и, следовательно, vpred_cc ниже, чем vmin, как в P1 на фиг.5, то крутящий момент T двигателя транспортного средства во втором прогнозировании vpred_Tnew берут в качестве максимального крутящего момента в следующем цикле моделирования. Это проиллюстрировано на фиг.6 на этапе S21, см. также формулу (5), и представлено пунктирной линией на фиг.5. Однако это предполагает, что vpred_cc была ниже, чем vmin, перед возможным становлением выше vmax. Если идентифицирован спуск, и, следовательно, vpred_cc выше, чем vmax, как в P2 на фиг.5, то крутящий момент T двигателя транспортного средства во втором прогнозировании vpred_Tnew берут в качестве минимального крутящего момента в следующем цикле моделирования. Это проиллюстрировано на фиг.6 как этап S31, см. также формулу (6), и представлено пунктирной линией на фиг.5. Однако это предполагает, что vpred_cc была выше, чем vmax, перед возможным становлением ниже vmin. Согласно варианту осуществления изобретения, вычислительный блок, описанный со ссылкой на фиг.1, приспособлен для выполнения описанных выше вычислений и т.д.
Если vpred_cc выше или равна vmin и ниже или равна vmax, то в качестве опорного значения берут vref, которое представляет vset, что проиллюстрировано на фиг.6 как этап S3. В этом случае в качестве опорного значения предпочтительно берут vset. Например, это означает, что холм не идентифицирован, и, следовательно, что vpred_cc вышла за пределы скоростного диапазона, или что транспортное средство будет перемещаться по ровной дороге. Следовательно, в этом случае vset становится опорной скоростью, относительно которой система управления транспортного средства должна выполнять регулировки. vpred_Tnew предпочтительно по-прежнему прогнозируют при максимальном или минимальном крутящем моменте для того, чтобы добиться равномерной нагрузки на процессор.
Если идентифицирован холм, то в предпочтительном варианте осуществления изобретения применяют правила для определения опорного значения, относительно которого должно быть отрегулировано транспортное средство. В этом случае вычислительный блок приспособлен к применению правил для определения опорного значения. Одно правило содержит сравнение скорости vpred_Tnew транспортного средства во втором прогнозировании с vmin и vmax, которые разграничивают диапазон, в пределах которого запланирована скорость транспортного средства. Другое правило состоит в следующем: если vpred_Tnew во втором прогнозировании находится между vmin и vmax или равна vmin или vmax, то опорное значение, которому следует транспортное средство, определяют как значение, которое представляет собой спрогнозированную скорость vpred_Tnew. Таким образом, можно гарантировать, что скорость транспортного средства не поднимется выше или не опустится ниже скоростных пределов, если подан максимальный или минимальный крутящий момент. На фиг.5 три пунктирные линии на верхней диаграмме иллюстрируют то, как vpred_Tnew спрогнозирована при максимальном крутящем моменте, а затем спрогнозирована превышающей vmax. Поскольку этот сценарий является нежелательным, то в качестве опорного значения подают vset. Только когда спрогнозированная vpred_Tnew не превышает vmax, может быть подано опорное значение, представляющее эту скорость.
Это проиллюстрировано в схеме последовательности операций на фиг.6 так, что если vpred_Tnew спрогнозирована при максимальном крутящем моменте, то на этапе S22 ее сравнивают с vmax. Если vpred_Tnew ниже или равна vmax, то в качестве опорного значения должен быть подан максимальный крутящий момент транспортного средства (этап S23). Максимальный крутящий момент предпочтительно подают в тот момент времени, когда vpred_cc становится ниже vmin, при условии что спрогнозированная vpred_Tnew не превышает vmax. Аналогичным образом, если vpred_Tnew спрогнозирована при минимальном крутящем моменте, то на этапе S32 ее сравнивают с vmin. Если vpred_Tnew выше или равна vmin, то в качестве опорного значения должен быть подан минимальный крутящий момент транспортного средства (этап S33). Следовательно, минимальный крутящий момент предпочтительно подают в тот момент времени, когда vpred_cc превышает vmax, при условии что спрогнозированная vpred_Tnew не становится ниже, чем vmin.
Для того чтобы в транспортном средстве был достигнут минимальный или максимальный крутящий момент, опорная скорость vref может быть подана со смещением. Минимальный крутящий момент может быть, например, подан путем подачи опорной скорости vref как низкого значения ниже vmin, например, как vmin-k1, где k1 находится в пределах диапазона от 1 км/ч до 10 км/ч. В этом случае блок управления двигателем будет создавать тормозной момент для двигателя. Максимальный крутящий момент может быть достигнут путем подачи опорной скорости как высокой скорости выше vmax, например, как vmax+k2, где k2 находится в пределах диапазона от 1 км/ч до 10 км/ч.
Другое правило состоит в том, что если во втором прогнозировании vpred_Tnew выше vmax или ниже vmin, то в качестве опорного значения транспортного средства берут vset. Это проиллюстрировано этапом S3 на фиг.6.
При следующей выборке, например, каждую секунду, способ снова начинают с S1. Время, затрачиваемое на выполнение вычислений, адаптировано так, чтобы во время цикла моделирования был прогнан весь способ.
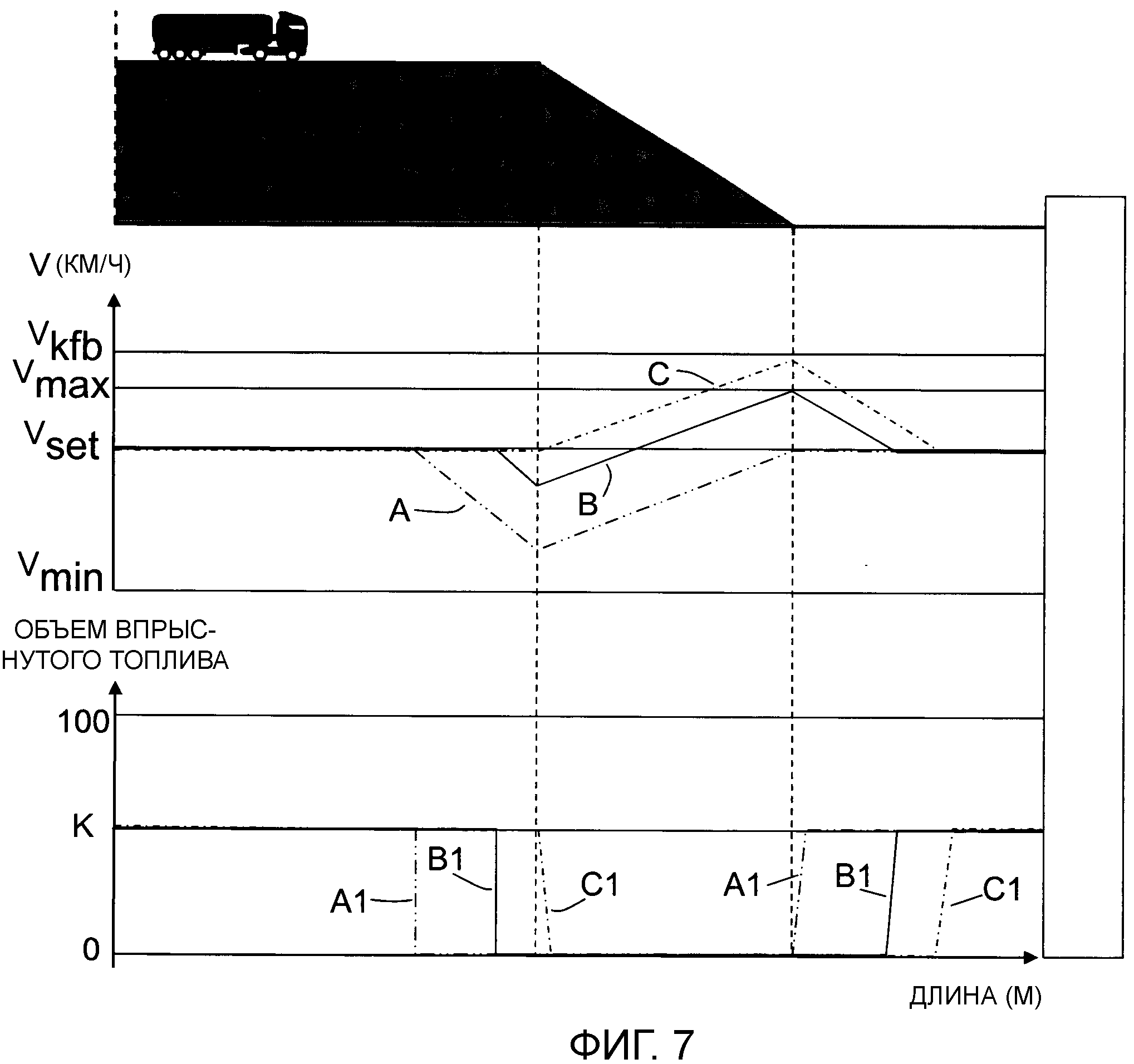
На фиг.7 проиллюстрированы три различных профиля A, B и C скорости и объем A1, B1 и C1 впрыснутого топлива в течение соответствующих периодов, когда спрогнозировано движение транспортного средства вниз с холма. Профиль A скорости иллюстрирует альтернативный вариант осуществления настоящего изобретения, в соответствии с которым vref непрерывно падает насколько это возможно, но не ниже vmin, для дополнительной экономии топлива за счет более длительного времени пробега. Таким образом, объем топлива уменьшен или дросселирован на более ранней стадии, чем в других проиллюстрированных режимах вождения. Однако после спуска желательно возвратиться к vset, как проиллюстрировано на диаграмме. Таким образом, уменьшенный расход топлива является приоритетным в том смысле, что уменьшения имеют место при условии, что после этого скорость транспортного средства может вернуться к vset. Этот вариант осуществления изобретения может быть, например, реализован в способе, проиллюстрированном в схеме последовательности операций, показанной на фиг.6 следующим образом: посредством взятия vmax в качестве vset на этапе S2 и/или посредством взятия vref в качестве vmin на этапе S3. Это не приводит ни к превышению скорости, ни к какому-либо увеличению потерь вследствие, например, аэродинамического сопротивления. Поскольку снижение скорости транспортного средства происходит раньше и до более низкой скорости, то результатом является уменьшенный расход топлива. Это также позволяет более легким транспортным средствам с полной массой менее приблизительно 30 тонн экономить топливо в большей степени. Профиль B скорости на фиг.7 иллюстрирует режим вождения согласно более ранним вариантам осуществления настоящего изобретения, а профиль C скорости иллюстрирует режим вождения, в соответствии с которым транспортное средство движется с использованием традиционной системы автоматического поддержания скорости. vkfb представляет собой предел скорости для вождения с традиционной системой автоматического поддержания скорости. B1 и C1 иллюстрируют объемы топлива, впрыснутого в течение соответствующих периодов. K представляет собой значение объема впрыснутого топлива, выраженное в процентах.
Согласно варианту осуществления изобретения, определяют наибольшую скорость vpred_cc,max и наименьшую скорость vpred_cc,min во время первого прогнозирования скорости vpred_cc транспортного средства с использованием обычной системы автоматического поддержания скорости и затем используют их в сравнении с vmax и vmin для определения крутящего момента T двигателя транспортного средства во втором прогнозировании. В этом случае вычислительный блок приспособлен для выполнения этих вычислений. Следовательно, необходимо сохранять только скаляры вместо целых векторов, что приводит к экономии объема памяти. Также отсутствует необходимость в сохранении значений после их использования в цикле моделирования, поскольку отсутствует подстройка опорных значений в горизонте сзади и их снова не используют для вычислений. Эта разница по сравнению с какими-либо другими алгоритмами вычисления экономит производительность процессора и помогает добиться постоянной нагрузки на процессор. Таким же самым образом во время цикла моделирования также могут быть определены наибольшая и наименьшая скорости для прогнозирования vpred_Tnew.
Согласно варианту осуществления изобретения к опорному значению, например, vref, добавляют гистерезис во избежание регулирования с тряской и во избежание пропуска некоторой экономии топлива. В этом варианте вычислительный блок приспособлен для добавления этого гистерезиса к опорному значению vref. Во избежание изменения опорной скорости vset, к которой стремятся, в каждом цикле моделирования, например, каждую секунду, разрешено, чтобы vref немного выходила за пределы диапазона скоростей, ограниченного vmin и vmax. Это отклонение может составлять, например, 1 км/ч или 2 км/ч за пределами vmin или vmax. Например, когда крутящий момент транспортного средства определен как минимальный крутящий момент, то может быть разрешено, чтобы vref немного выходила за пределы vmin, как проиллюстрировано в приведенном ниже примере:
|
В этом примере можно заметить, что vpred_cc,min становится ниже скоростного предела vmin, равного 70 км/ч, за 5 секунд. В этом случае vpred_cc,min равна 69 км/ч. В этом случае vref должна быть в действительности подана при максимальном крутящем моменте, а это вызывает то, что vref становится равной 80 км/ч за 5 секунд. Однако в следующей временной выборке vpred_cc,min становится обратно выше предела vmin, а это означает, что подана другая vref. Во избежание сильного изменения vref за короткие интервалы времени взамен подают значение vref, которое в некоторой степени ниже vmin.
Согласно другому варианту осуществления изобретения, (скоростям) vmin и vmax следуют в качестве опорных значений. Этот вариант осуществления изобретения является альтернативой использованию гистерезиса или добавления константы k1 или k2 к опорному значению, и, следовательно, он может использоваться для предотвращения регулирования с трясками или для достижения некоторого низкого или высокого крутящего момента. Этот вариант осуществления приводит к меньшей чувствительности к любым погрешностям в прогнозированиях скорости и избегает раздражения водителя вследствие того, что скорость не становится ниже vmin или выше vmax.
В варианте осуществления изобретения при выборе того, какие стратегии управления следует прогнозировать (то есть что приводит к vpred_Tnew), учитывают коэффициент полезного действия двигателя и комфорт/дорожные качества автомобиля. Принимая в качестве величины и/или момента времени крутящий момент, который приводит к тому, что vpred_Tnew по-разному зависит от коэффициента полезного действия двигателя, или на основании требований, предъявляемых к комфорту, это позволяет добиться создания удобной и экономичной системы автоматического поддержания скорости. Это может быть реализовано на основании правил, в соответствии с которыми, например, существует некоторый крутящий момент при некоторой частоте вращения двигателя, или в соответствии с которыми никогда не разрешен крутящий момент, приводящий к большему ускорению, чем некоторое предельное значение.
Изобретение также включает в себя компьютерный программный продукт, содержащий программные инструкции для разрешения компьютерной системе в транспортном средстве выполнять этапы согласно описанному способу при исполнении этих инструкций в упомянутой компьютерной системе. Изобретение также включает в себя компьютерный программный продукт, в котором инструкции хранятся на носителе, который может быть считан компьютерной системой.
Настоящее изобретение не ограничено вариантами его осуществления, которые описаны выше. Могут использоваться различные альтернативные варианты, модификации и эквиваленты. Следовательно, описанные выше варианты осуществления изобретения не ограничивают объем настоящего изобретения, который определяется приложенной формулой изобретения.
Способ определения количеств модификатора, добавляемых в расплав чугуна
Устройство для поддержания необходимой температуры батареи в транспортном средстве
Способ и устройство, относящиеся к охлаждению дозаторов в системах scr
Способ и устройство, относящиеся к ограничению температуры дозатора в системе scr
Способ, система и устройства для установки спального места в ограниченном пространстве
Способ и модуль для управления скоростью транспортного средства
Узел трубы в канале для газообразной среды
Способ и система очистки выхлопных газов
Способ, относящийся к удалению воздуха из системы подачи жидкости, и система подачи жидкости
Активирующее устройство и способ активации для сдвоенной батарейной системы
Система управления точками переключения передач
Способ определения количеств модификатора, добавляемых в расплав чугуна
Устройство для поддержания необходимой температуры батареи в транспортном средстве
Способ и устройство, относящиеся к охлаждению дозаторов в системах scr
Способ и устройство, относящиеся к ограничению температуры дозатора в системе scr
Способ, система и устройства для установки спального места в ограниченном пространстве
Способ и модуль для управления скоростью транспортного средства
Узел трубы в канале для газообразной среды
Способ и система очистки выхлопных газов
Способ, относящийся к удалению воздуха из системы подачи жидкости, и система подачи жидкости

