Результат интеллектуальной деятельности: МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП
Вид РИД
Изобретение
Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа, в которых для повышения точности используется термокомпенсация.
Рабочий диапазон температур современных ММГ превосходит, как правило, 100°C. При изменении температуры окружающей среды могут изменяться как нулевой сигнал ММГ, так и его крутизна или масштабный коэффициент. Одним из способов повышения точности ММГ является его термостабилизация. Один из вариантов термостабилизации микромеханического датчика (ММД) описан в работе [1], в которой для поддержания температуры используется система с датчиком температуры и нагревателем.
Недостатком такого решения является повышенное потребление мощности ММД.
Другим решением является использование термокомпенсации, при которой используется датчик температуры и устройство коррекции сигнала ММД. Такое решение применяется в ряде ММГ, выпускаемых фирмой Analog Devices: например, в ММГ ADXRS150 (см. [2]) встроен датчик температуры, построенный по схеме РТАТ, описанной в работе [3].
Вариант процедуры подбора коэффициентов термокомпенсации описан в работе [4].
Другой вариант термокомпенсации с цифровым датчиком температуры, встроенным в заказную интегральную схему для ММГ, описан в работе [5]. На фиг.1 описания термокомпенсация осуществляется в цифровом процессоре 140 в блоке 145, в который поступают сигналы от демодулятора 143 и температурного датчика 185.
Варианты термокомпенсации и термостабилизации вибрационного ММГ описаны в статье [6]. В этой же работе отмечается, что температурно-зависимыми являются такие параметры резонансного подвеса подвижной массы ММГ, как добротность Q и резонансная частота fp.
Сравнивая (см. фиг.5 и 6) процентные изменения Q и fp при одном и том же диапазоне температур, можно увидеть, что изменения Q на два порядка выше, чем fp. В этой статье также отмечается, что амплитуда первичных колебаний благодаря системе стабилизации изменяется незначительно (≈1%) во всем диапазоне температур (см. фиг.10, 11).
Эта зависимость добротности Q от температуры Т отмечалась и в более ранних работах для других типов ММГ [7, 8].
В работе [9] предложено определять температуру чувствительного элемента (ЧЭ) ММГ не с помощью внешнего датчика температуры, а за счет измерения температурного изменения fp.
Наиболее близким аналогом (прототипом) предлагаемого ММГ является компенсационная система для ММГ, приведенная в работе [6].
Эта система содержит ММГ, аналого-цифровой преобразователь (АЦП), вход которого подключен к выходу ММГ, микропроцессор, к входу которого подключен выход АЦП, и термодатчик, выход которого подключен к микропроцессору. ММГ, при этом содержит систему возбуждения первичных колебаний на резонансной частоте подвеса инерционной массы (ИМ) и стабилизации амплитуды первичных колебаний, образованную последовательно включенными первым преобразователем емкость-напряжение, блок автоматического регулирования усиления (АРУ), усилитель. Эти последовательно включенные элементы соединены с электродами, расположенными по оси первичных колебаний. Кроме того, к электродам, расположенным по оси вторичных колебаний, подключен второй преобразователь емкость-напряжение, выход которого соединен с одним из входов демодулятора, а другой вход - с выходом первого преобразователя емкость-напряжение через фазовращатель.
Недостатком данного прототипа является то, что компенсация температуры осуществляется с погрешностью, обусловленной тем, что датчик расположен на некотором расстоянии от ЧЭ (см. фиг.19). Поэтому температура ЧЭ будет определяться им с погрешностью из-за наличия разности температур между ними. Эта разность может изменяться при изменении температуры окружающей среды, потребляемой системой мощности.
Задачей изобретения является снижение зависимости выходного сигнала от температуры.
Поставленная задача решается тем, что в ММГ, содержащем чувствительный элемент с резонансным подвесом инерционной массы, электроды, расположенные по двум ортогональным осям вокруг инерционной массы, электронный блок, включающий в себя последовательно соединенные первый преобразователь емкость-напряжение, блок АРУ, усилитель, и последовательно включенные второй преобразователь емкость-напряжение, демодулятор, имеющий первый и второй входы и выход, блок температурной коррекции, первый вход блока температурной коррекции соединен с выходом демодулятора, второй вход блока температурной коррекции соединен с выходом блока АРУ.
Кроме того, поставленная задача решается тем, что выход блока АРУ соединен со входом блока температурной коррекции через фазовращатель, при этом блок температурной коррекции выполнен с амплитудным детектором на входе, подключаемом к блоку АРУ.
По сравнению с прототипом в предложенном устройстве достигается повышение точности за счет того, что для компенсации влияния изменений температуры на ММГ измеряется по существу температура именно ЧЭ, а не температура в месте установки датчика температуры. Это измерение производится косвенным методом путем определения добротности Q, которая зависит от температуры Т. Как показывает проведенный теоретический анализ и экспериментальная проверка, выполненная на ЧЭ для ММГ различного типа, зависимость Q(T) носит монотонный характер.
По сравнению с аналогом [9], в котором самокомпенсация влияния температуры осуществлена за счет измерения изменений резонансной частоты (fp) подвеса ИМ, в предложенном устройстве может быть достигнута более высокая точность за счет большего относительного изменения температурно-зависимого параметра (изменения Q на два порядка выше, чем fp).
Заявляемое устройство поясняется чертежами.
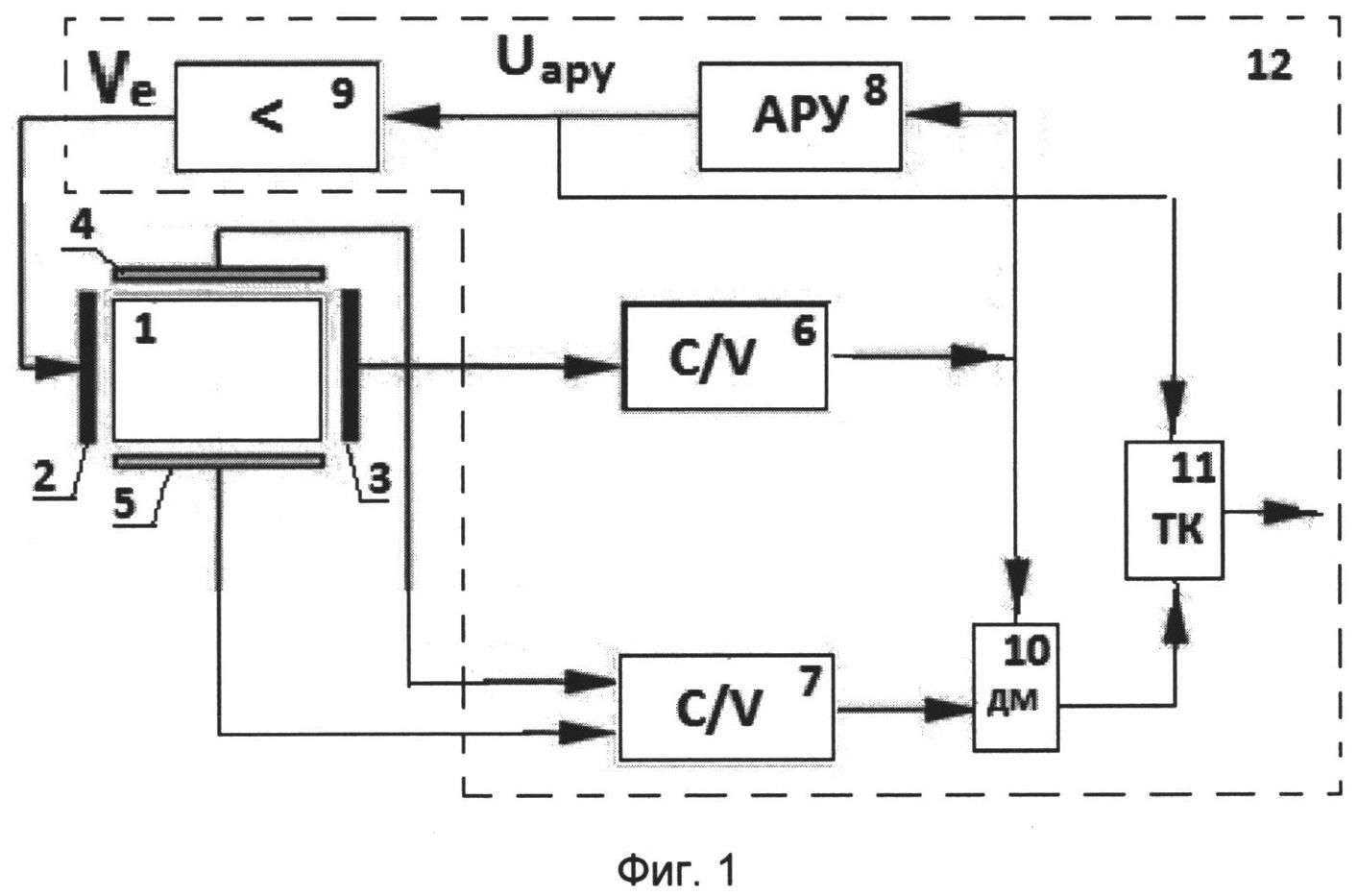
На фиг.1 показана блок-схема предложенного устройства.
На фиг.1 приняты следующие обозначения:
1 - инерционная масса,
2, 3 - электроды, расположенные по оси первичных колебаний,
4, 5 - электроды, расположенные по оси вторичных колебаний,
6, 7 - соответственно первый и второй преобразователи емкость-напряжение,
8 - блок АРУ,
9 - первый усилитель,
10 - демодулятор (ДМ),
11 - блок температурной коррекции (ТК),
12 - электронный блок, включающий устройства 6-11,
VE - сигнал управления,
Uapy - выходной сигнал блока АРУ.
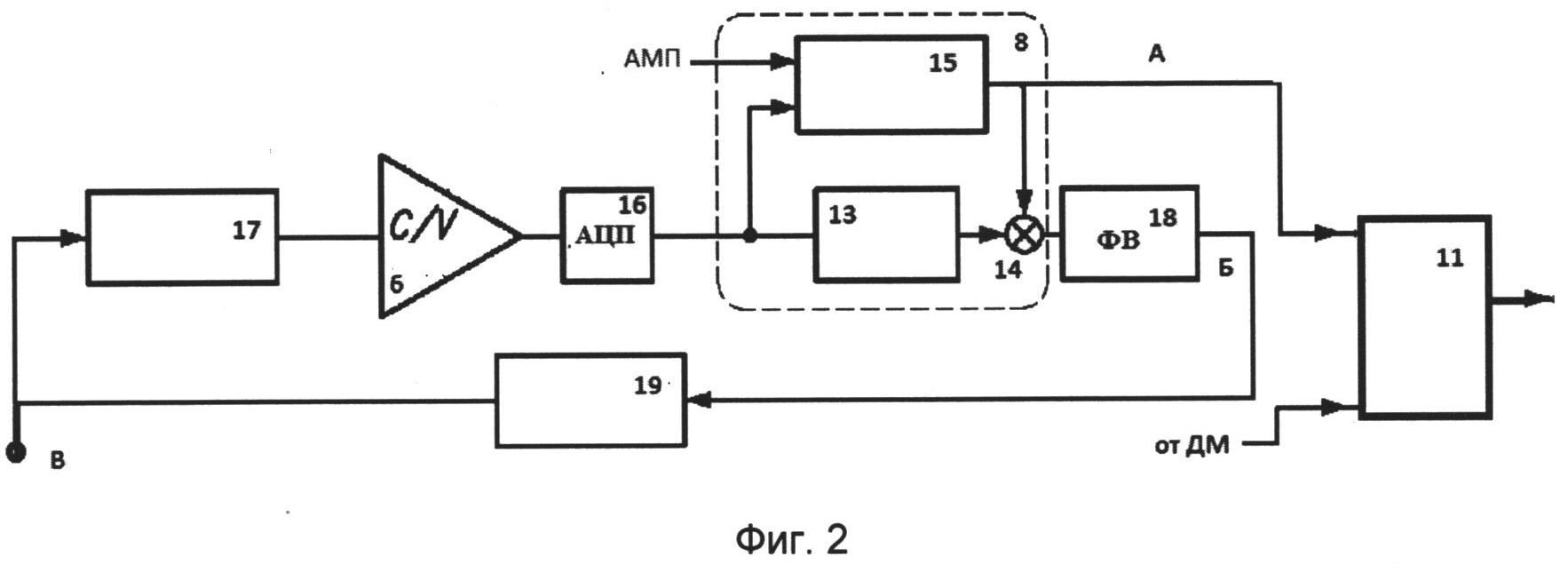
На фиг.2 приведен вариант выполнения предложенного устройства.
На фиг.2 приняты следующие обозначения:
6 - первый преобразователь емкость-напряжение,
8 - блок АРУ,
11 - блок температурной коррекции,
13 - второй усилитель,
14 - устройство умножения,
15 - блок управления амплитудой первичных колебаний,
16 - АЦП,
17 - резонансное звено,
18 - фазовращатель,
19 - третий усилитель, работающий в ключевом режиме,
АМП - сигнал управления амплитудой первичных колебаний.
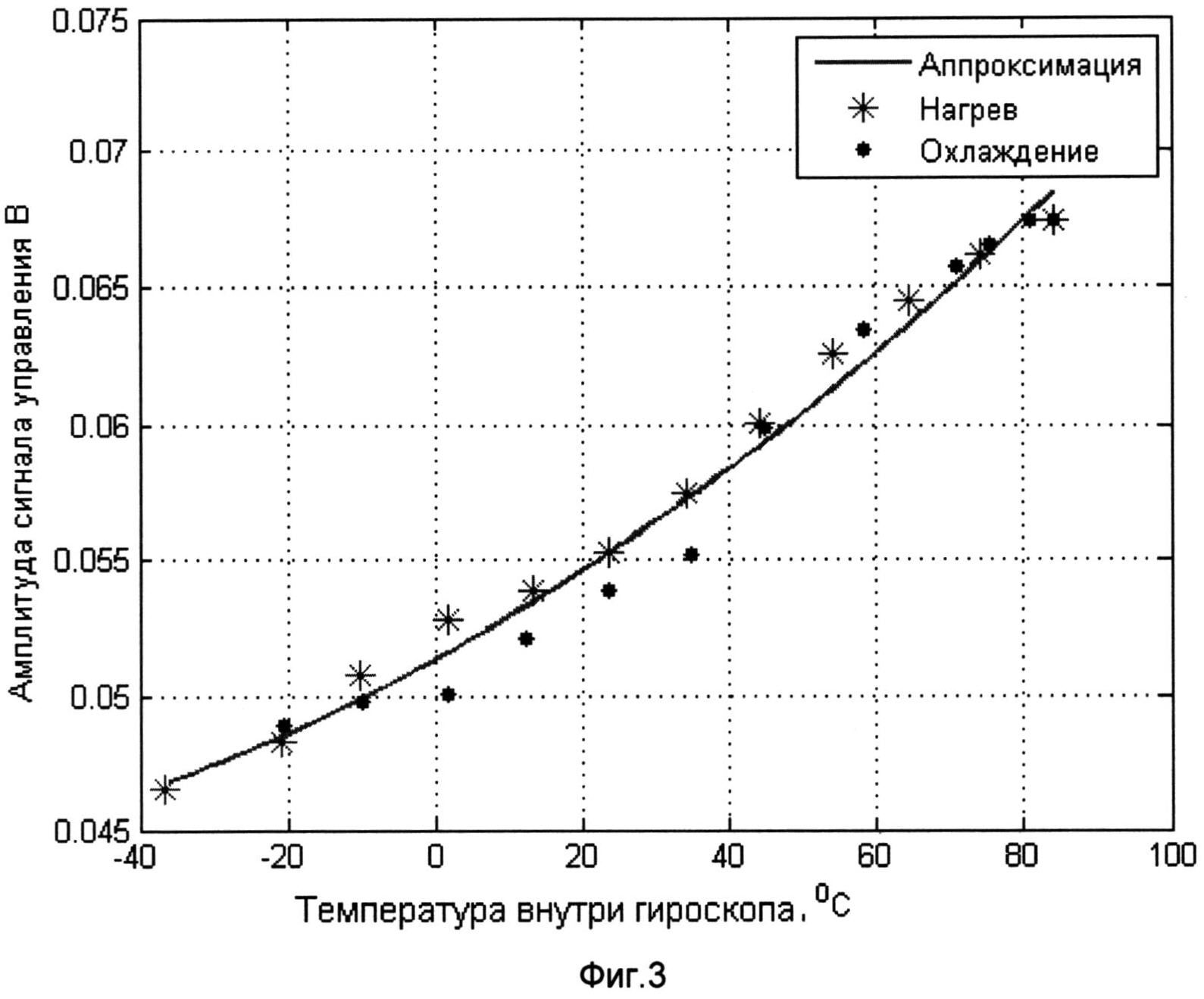
На фиг.3 приведена экспериментально полученная зависимость амплитуды сигнала управления от температуры.
Предлагаемое устройство работает следующим образом.
Инерционная масса 1 в ЧЭ подвешена с помощью торсионов к опоре (на фиг.1 не показаны) и находится между электродами 2, 3, расположенными по оси первичных колебаний, и электродами 4, 5, расположенными по оси вторичных колебаний. С электродами 2, 3, расположенными по оси первичных колебаний, соединен вход первого преобразователя емкость-напряжение 6, с электродами 4, 5, расположенными по оси вторичных колебаний, соединен вход второго преобразователя емкость-напряжение 7.
Отметим, что количество электродов, расположенных по оси первичных колебаний, может быть больше, и они имеют, как правило, гребенчатую структуру; преобразователь 6 может выполняться как устройство с дифференциальным входом. Однако эти варианты выполнения не влияют на существо предложенного решения.
Выход преобразователя 6 соединен со входом блока АРУ 8, выход которого через усилитель 9 соединен с электродом 2.
Демодулятор 10 входами соединен с выходами преобразователей 6, 7.
Входы блока температурной коррекции 11 соединены с выходом блока АРУ 8 и выходом демодулятора 10.
Элементы 6-11 представляют собой электронные узлы, которые, как правило, выполняются в современных ММГ совместно, в виде заказной интегральной схемы (ИС). Эта электронная часть ММГ показана на фиг.1 как электронный блок 12.
Блоки 6, 8, 9 совместно с резонансным подвесом ИМ 1 образуют систему возбуждения первичных колебаний, в которой за счет блока АРУ 8 амплитуда этих колебаний сохраняется постоянной. Даже при изменении температуры (Т) окружающей среды на 100-120°C, при которой добротность резонансного подвеса Q изменялась более чем в два раза (как описано в работе [6] см. фиг.6), изменения амплитуды не превышали 1% (фиг.10, 11 данной работы). При сохранении амплитуды первичных колебаний практически постоянной, амплитуда сигнала на выходе преобразователя 6 также постоянна, а сигнал на выходе блока АРУ 8 изменяется обратно пропорционально добротности подвеса Q-1.
Поскольку зависимость Q(T) изменяется монотонно, зависимость Q-1(T) также будет монотонной, что позволяет по величине Q-1 однозначно определить Т. Таким образом сигнал на выходе блока АРУ 8 оказывается зависимым от величины Т.
Это позволяет вызванные изменениями температуры изменение смещения нуля и крутизны сигнала на выходе демодулятора 10 корректировать не сигналом от датчика температуры, как это имеет место в прототипе, а сигналом с выхода блока АРУ 8.
Вариант предложенного устройства с типичным цифровым каналом первичных колебаний приведен на фиг.2анного описания. Пример цифрового канала описан в работе [5] (фиг.2а описания к данной заявке), в которой описаны состав электронных узлов, входящих в заказную ИС, и их работа.
На фиг.2 выход преобразователя 6 соединен со входом АЦП 16, блок АРУ 8 образован усилителем 13, устройством умножения 14 и блоком управления амплитудой первичных колебаний 15. Эти блоки соединены следующим образом: входы устройства умножения 14 соединены с выходами элементов 13, 15, к одному из входов элемента 15 поступает сигнал, пропорциональный задаваемой амплитуде первичных колебаний, второй вход блока 15 и вход блока 13 соединены с выходом АЦП 16.
Выход элемента 14 через фазовращатель 18 и устройство 19 соединен с электродами ЧЭ, которые могут рассматриваться в качестве входа резонансного звена 17 с передаточной функцией вида (k/(T1p2+T1Q-1p+1), где k - коэффициент передачи этого звена, а его резонансная частота равна (2πT1)-1. Один вход блока температурной коррекции 11 соединен со входом демодулятора 10, а другой вход соединен с выходом блока автоматического регулирования усиления (АРУ) 8 через фазовращатель 18.
В устройстве на фиг.2 элементы 13-15, 19 реализованы как цифровые и выполняют в совокупности ту же функцию, как и элементы 8, 9 на фиг.1, т.е. они обеспечивают возникновение и стабилизацию первичных колебаний в ММГ. Отметим, что в устройстве на фиг.1 функции фазовращателя могут выполнять либо блок АРУ 8, либо первый усилитель 9, без изменения существа работы устройства. В первом случае второй усилитель 13, входящий в блок АРУ 8, а во втором - первый усилитель 9 должны иметь на резонансной частоте сдвиг фазы, равный 90°.
Сигнал на выходе элемента 15 пропорционален амплитудам сигналов на выходе элементов 18 и 19. Коэффициенты пропорциональности между этими величинами сохраняются постоянными в процессе работы, если фазовращатель имеет постоянный коэффициент передачи в области изменения резонансной частоты резонатора. Такие фазовращатели известны, они могут быть построены по схеме, реализующей передаточную функцию вида
(1-τр)/(1+τр) или е-τр.
В этом случае вход блока температурной коррекции 11 может быть соединен с одним из выходов, обозначенных на фиг.2 буквами А, Б, В. В случае подключения к выходам Б и В входа блока температурной коррекции 11 последний должен быть выполнен с амплитудным детектором на подключаемом к этим выходам входе.
При изменении температуры резонансная частота резонатора может изменяться. Если фазовращатель 18 выполнен по схеме интегратора или дифференциатора, то в этом случае коэффициент пропорциональности между сигналом на выходе блока АРУ (выход А) и амплитудой на выходе фазовращателя 18 может изменяться, что приводит к погрешности определения добротности Q и, соответственно, к погрешности термокомпенсации.
Эти погрешности могут быть исключены, если блок температурной коррекции 11 соединить с выходом фазовращателя 18, поскольку амплитуда выходного сигнала этого элемента будет пропорционально величине Q-1. При этом в блоке температурной коррекции 11 осуществляется преобразование сигналов как функции от амплитудного значения сигнала с выхода элемента 18. Это возможно, если блок температурной коррекции 11 выполнен с амплитудным детектором на входе, реализованном программным путем или в виде отдельного устройства.
Третий усилитель 19 может быть реализован как сигма-дельта модулятор, в котором выходной каскад представляет собой ключи, подключающие к электродам (электрод 2 на фиг.1) на определенные промежутки времени источники постоянного напряжения. Длительность этих промежутков времени определяется входным сигналом усилителя 19.
Экспериментально полученная зависимость амплитуды сигнала управления от температуры при изменении температуры в обоих направлениях (нагрев, охлаждение и аппроксимация этой зависимости) представлена на фиг.3. Эта зависимость получена при исследовании ММГ, описание которого приведено в работе [10].
При использовании полиноминальной функции второго порядка от сигнала управления при коррекции смещения нуля было достигнуто уменьшение смещения в шесть раз (по сравнению со смещением нуля без коррекции).
Обобщенный вид блока температурной коррекции 11 приведен на фиг.1 работы [9]). Блок 11 может содержать звенья умножения и суммирования для реализации полиноминальной коррекции сигнала с выхода демодулятора 10 как по крутизне, так и по смещению нуля.
Возможны и другие виды коррекции сигнала, например, с использованием разного вида функций для разных диапазонов температур.
Таким образом, уменьшение температурной зависимости выходного сигнала ММГ в предложенном устройстве достигается не за счет использования специального датчика температуры, а за счет выделения сигнала управления первичными колебаниями ИМ, который вследствие зависимости добротности резонансного подвеса от температуры позволяет фактически определять фактическую температуру ЧЭ ММГ.
Эффект повышения точности температурной компенсации ММГ в предложенном устройстве может проявиться в тех случаях, когда по условиям применения может иметь место значительная скорость изменения температуры окружающей среды. В этом случае разница между текущей температурой ЧЭ и внешним термодатчиком может быть значительной и соответственно компенсация по сигналу термодатчика неэффективна в отличие от термокомпенсации в предложенном устройстве.
Достигаемый технический эффект - повышение точности ММГ.
Список литературы
1. Патент РФ №2244936.
2. http://www.analog.com/static/imported-files/data_sheets/ADXRS150.pdf.
3. http://en.wikipedia.org/wiki/Bandgap_voltage_reference.
4. http://www.analog.com/static/imported-files/application_notes/AN-1049.pdf.
5. Международная заявка WO 2012/035439 A2.
6. Dunzhu Xia, Shilling Chen, Shourong Wang and Hongsheng Li. Microgyroscope Temperature Effects and Compensation-Control Methods // Sensors, 2009, №9, p.8349-8376.
7. Shcheglov К., Evans С., Gutierrez R., Tang Т.К. Temperature dependent characteristics of the JPL silicon MEMS gyroscope // Aerospace Conference Proceedings, 2000 IEEE, Volume: 11, 18-25 March 2000, p.403-411, vol.1.
8. Ferguson M.I., Keymeulen D., Peay C., Yee K. Effect of temperature on MEMS vibratory rate gyroscope // IEEE Aerospace Conference, Big Sky, Montana, 2005, p.1-6.
9. I.P. Prikhodko et al. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing, Sens.Actuators A: Phys. (2013), http://dx.doi.org/10.1016/j.sna2012.12.024.
10. Пешехонов В.Г. и др. Результаты испытаний установочной партии микромеханических гироскопов RR-типа // Гироскопия и навигация, 2011, №1, с.37-48.
Гидроакустическая антенна и способ обработки сигналов в ней
Астронавигационная система
Микромеханический гироскоп rr-типа
Гидроакустическая антенна
Микромеханический гироскоп вибрационного типа
Градиентометрический сейсмоприемник
Двухстепенной стенд для задания угловых колебаний
Микромеханический гироскоп
Способ компенсации синфазной помехи в микромеханическом гироскопе

