Результат интеллектуальной деятельности: УСТАНОВКА ДЛЯ МОДЕЛИРОВАНИЯ ЗАКОНА СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА
Вид РИД
Изобретение
Изобретение относится к учебным приборам и может быть использовано в лабораторном практикуме в высших и средних специальных учебных заведениях по курсу физики для получения и углубления знаний физических законов и явлений.
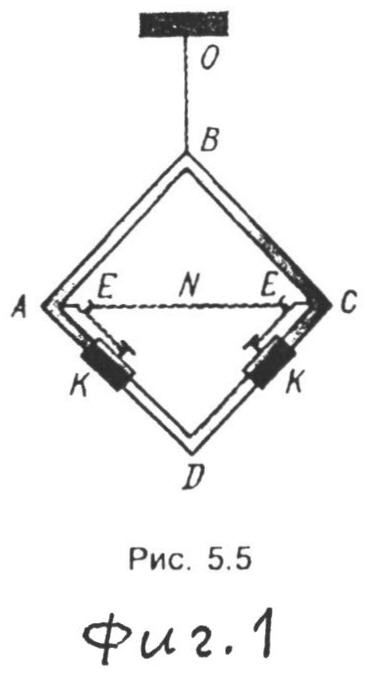
Известна установка для демонстрации закона сохранения момента импульса (фиг.1), (А.А. Детлаф, Б.М. Яворский. Курс физики. М.: Высшая школа, 1999, рис 5.5, стр 66), содержащая квадратную рамку ABCD, изготовленную из тонких стержней. На стержни AD и CD надеты одинаковые цилиндрические грузы K, имеющие возможность свободно скользить по этим стержням. Грузы К удерживаются в верхнем положении прикрепленной к ним ниткой N, перекинутой через крючки E в рамке. Рамка подвешена на неупругой нити OB. Если рамку привести во вращение вокруг вертикальной оси OB с угловой скоростью ω1, a затем нить N пережечь, то грузы K опустятся по стержням AD и CD вниз, приближаясь к оси вращения, а угловая скорость вращения рамки заметно возрастет (ω2>ω1). Поэтому произведение момента инерции рамки с грузами относительно оси OB на угловую скорость рамки до и после пережигания нити должно остаться неизменным: I1ω1=I2ω2. Так как I1>I2, то ω2>ω1. На этой установке можно продемонстрировать закон сохранения момента импульса, вычислить моменты инерции I1 и I2, но нельзя точно измерить ω1 и ω2, так как момент внешних сил (реакции нити OB, тяжести и трения о воздух), приложенных к рамке с грузом, не равен нулю. Следовательно, I1ω1≠I2ω2.
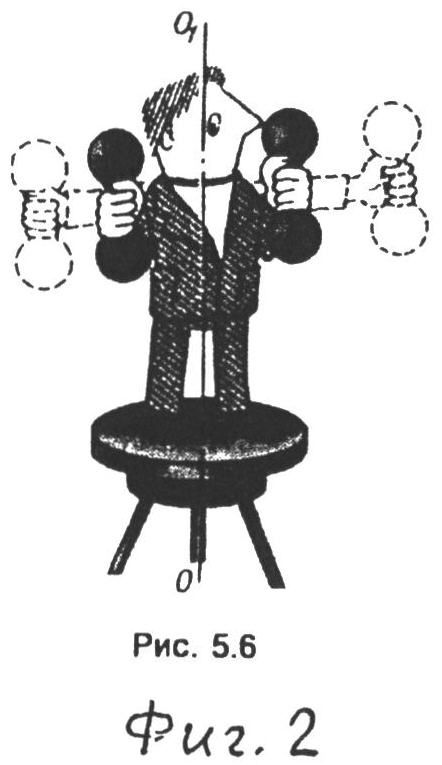
Известна скамья Жуковского (фиг.2), (А.А. Детлаф, Б.М. Яворский. Курс физики. М.: Высшая школа, 1999, рис 5.6, стр.67). Приближая гантели к груди, человек уменьшает момент инерции системы, при этом угловая скорость его вращения возрастает. Поскольку момент внешних сил (трения в подшипнике и о воздух) относительно оси вращения не равен нулю, поэтому на этой установке можно только продемонстрировать закон сохранения момента импульса, но невозможно точно измерить ω1 и ω2, так как I1ω1≠I2ω2.
Наиболее близким к предлагаемой установке является регулятор Уатта (фиг.3), (Элементарный учебник физики, том 1. Под редакцией Г.С. Ландсберга. М.: 1971, стр.270, рис.203). Он содержит: подставку 3, втулку 2, вал установки 1, установленный во втулке 2 перпендикулярно подставке 3; подвижную муфту 4, насаженную на вал установки 1; две тяги 5, которые первыми концами шарнирно соединены на противоположных сторонах подвижной муфты 4.
На этой установке можно определить угловую скорость ω в зависимости от положения грузов, вращающихся на валу установки. Можно численным методом рассчитать моменты инерции грузов I, вращающихся на валу установки с угловой скоростью ω, определить в произвольный момент времени момент импульса L=Iω. Однако, на ней нельзя моделировать закон сохранения момента импульса.
На регуляторе Уатта можно реализовать основной закон динамики вращательного движения, по которому производная по времени от момента импульса равна сумме моментов силы вращательного движения М и силы трения Мтр:
где L=Iω, ω - угловая скорость, I - момент инерции системы.
За счет момента силы вращения M двигателя можно добиться того, чтобы правая часть выражения (1) была равна нулю. В этом случае будем иметь модель замкнутой системы, когда внешние силы отсутствуют. Однако у регулятора Уатта (фиг.3) за счет работы двигателя происходит одновременное увеличение угловой скорости ω и момента инерции системы I, т.к. грузы массой m удаляются от оси вращения. И, наоборот, с уменьшением ω момент инерции системы I также уменьшается, т.к. грузы m приближаются к оси вращения. Для того чтобы моделировать на этой установке закон сохранения момента импульса, надо реализовать равенство L=Iω=const. Этого можно добиться, например, если рассматривать два состояния системы. В первом состоянии, когда грузы m находятся на минимальном расстоянии от оси вращения, момент инерции будет минимальным и равным I1, угловая скорость в этом состоянии должна быть максимальной ω1. Во втором состоянии, когда грузы m находятся на максимальном расстоянии от оси вращения, момент инерции будет максимальным I2, угловая скорость должна быть в этом случае минимальной ω2, тогда будет обеспечиваться закон сохранения момента импульса I1ω1=I2ω2. Для реализации этого равенства в первом состоянии в известную установку (фиг.3) следует ввести фиксатор положение грузов m. Когда момент инерции системы будет равен I1 (не дать грузам m разойтись), при помощи двигателя обеспечиваем максимальную угловую скорость ω1. Для реализации закона сохранения момента импульса во втором состоянии также следует грузы зафиксировать. В этом случае момент инерции будет максимальным и равным I2, а при помощи двигателя обеспечиваем минимальную угловую скорость ω2.
Величины I1 и I2 можно заранее рассчитать численным методом и определить их отношение  . Обороты двигателя надо сделать такими, чтобы
. Обороты двигателя надо сделать такими, чтобы  , следовательно, двигатель должен быть с регулятором оборотов.
, следовательно, двигатель должен быть с регулятором оборотов.
Техническим результатом изобретения является расширения функциональных возможностей прототипа (фиг.3). На предлагаемой установке можно моделировать закон сохранения момента импульса в двух состояниях системы, когда грузы прижаты к валу установки (I1ω1) и когда грузы расположены на максимальном расстоянии от вала установки (I2ω2) для N разнообразных угловых скоростей ω1 и ω2.
Указанный технический результат достигается тем, что в известную установку для моделирования закона сохранения момента импульса, содержащую подставку, втулку, вал установки, установленный во втулке перпендикулярно подставке, подвижную муфту, насаженную на вал установки, две тяги, первыми концами шарнирно соединенные на противоположных сторонах подвижной муфты, согласно изобретению введены тумблер, первая группа N резисторов, вторая группа N резисторов, электродвигатель, установленной на подставке, вал которого соединен с валом установки, горизонтальный стержень, неподвижно закрепленный симметрично и перпендикулярно валу установки, два подвижных стержня с грузами, первыми концами шарнирно соединенные с концами горизонтального стержня, а на вторых концах их размещены равные по весу грузы, при этом середины подвижных стержней с грузами шарнирно соединены со вторыми концами обеих тяг, источник постоянного тока, отрицательная клемма которого через тумблер соединена с отрицательной клеммой электродвигателя, переключатель на N положений, содержащий две платы, при этом общий контакт первой платы соединен с положительной клеммой электродвигателя, а подвижные контакты первой платы соединены с первыми выводами соответствующих резисторов первой группы N резисторов, а общий контакт второй платы соединен с положительной клеммой источника постоянного тока, а подвижные контакты второй платы соединены с первыми выводами соответствующих резисторов второй группы N резисторов, контактная пара, установленная на одном из концов горизонтального стержня, размыкающий стержень, установленный на первом конце подвижного стержня с грузом напротив контактной пары, два токоприемника, закрепленные неподвижно на валу установки, при этом подвижные контактные кольца токоприемников соединены с контактной парой, а неподвижный контакт первого токоприемника соединен со вторыми выводами резисторов первой и второй групп N резисторов, а неподвижный контакт второго токоприемника соединен с положительной клеммой источника постоянного тока, магнитные фиксаторы двух подвижных стержней с грузами, магниты которых расположены на противоположных концах горизонтального стержня, а металлические пластинки магнитного фиксатора - на первых концах подвижных стержней с грузами, шарообразная рукоятка, имитирующая голову вращающегося человека, трубка, один конец которой неподвижно закреплен на подвижной муфте таким образом, что вал установки может свободно перемещаться внутри нее, а другой конец трубки подвижно соединен с шарообразной рукояткой.
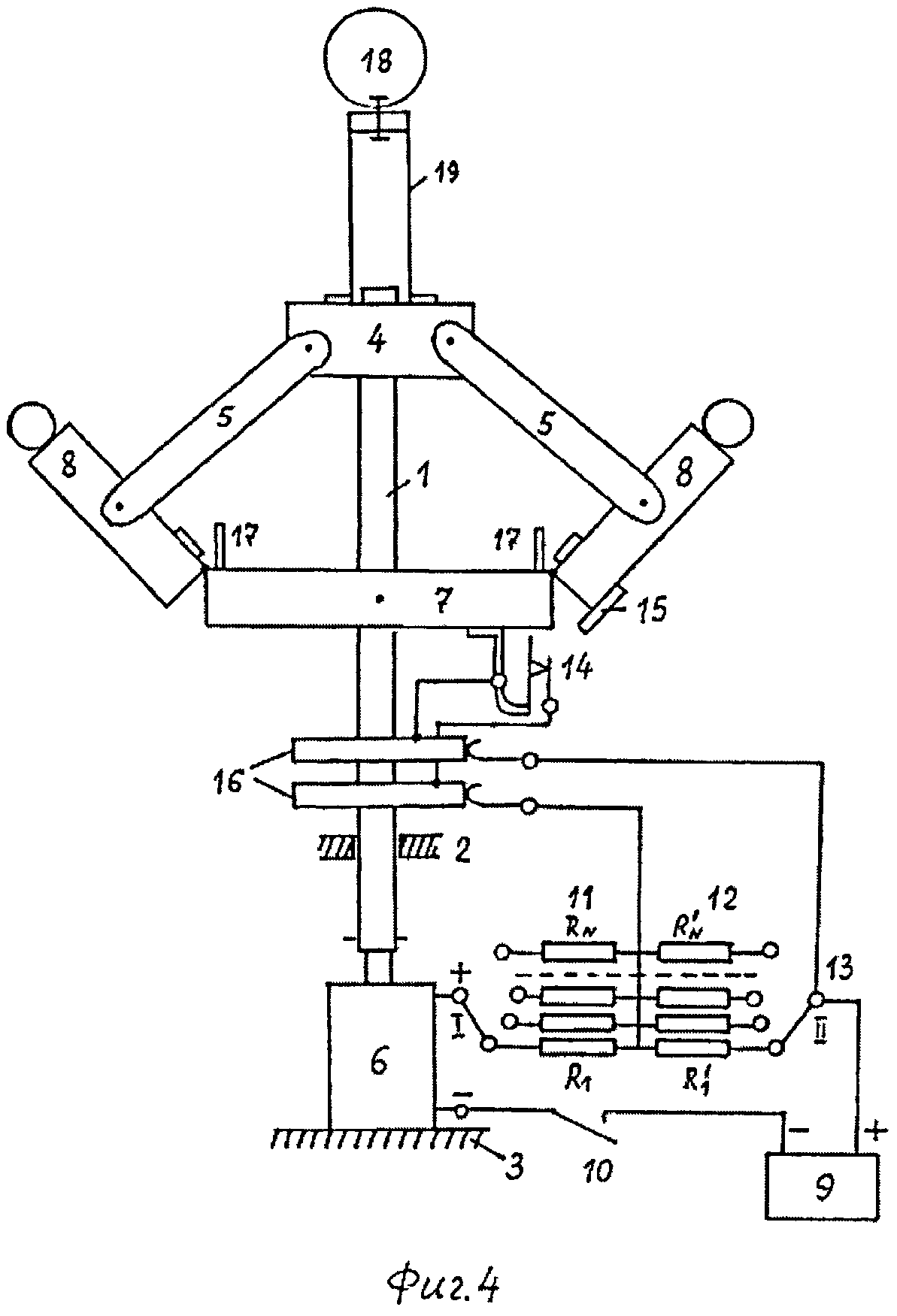
На фиг.1, 2 и 3 изображены известные установки; на фиг.4 показан общий вид предлагаемой установки. Предлагаемая установка (фиг.4) содержит: 1 - вал установки; 2 - втулку; 3 - подставку; 4 - подвижную муфту; 5 - тяги; 6 - электродвигатель; 7 - горизонтальный стержень; 8 - подвижные стержни с грузами; 9 - источник постоянного тока; 10 - тумблер; 11 - первую группу N резисторов; 12 - вторую группу N резисторов; 13 - переключатель на N положений; 14 - контактную пару; 15 - размыкающий стержень; 16 - токоприемники; 17 - магнитные фиксаторы; 18 - шарообразную рукоятку; 19 - трубку.
Рассмотрим состав и взаимодействие элементов предлагаемой установки (фиг.4). Она имитирует вращение человека вокруг оси, проходящей от головы к его ногам. Вращающийся человек имеет возможность руки прижать к оси вращения, при этом момент инерции I1 мал, а угловая скорость его вращения ω1 высокая. Если человек руки вытягивает в стороны, то момент инерции I2 увеличивается, а угловая скорость его вращения ω2 уменьшается. При этом I1ω1=I2ω2=const. В этом состоит сущность закона сохранения момента импульса. Вращение человека моделируется электродвигателем постоянного тока, число оборотов которого пропорционально подводимому напряжению. Если напряжение увеличиваем, то число оборотов n увеличивается. Соответственно, угловая скорость ω=2πn возрастет и наоборот. Изменение напряжения, подводимого к электродвигателю, осуществляется при помощи подобранных резисторов, включенных последовательно в цепи между источником постоянного тока и электродвигателем.
Предлагаемая установка содержит вал установки 1, установленной во втулке 2 перпендикулярно подставке 3. На вал установки 1 насажена подвижная муфта 4. На противоположных сторонах подвижной муфты 4 первыми концами шарнирно соединены две тяги 5. На подставке 3 установлен электродвигатель 6, вал которого соединен с валом установки 1. На валу установки 1 неподвижно закреплен симметрично и перпендикулярно горизонтальный стержень 7. К нему первыми концам шарнирно соединены два подвижных стержня с грузами 8. При этом середины подвижных стержней с грузами 8 шарнирно соединены со вторыми концами обеих тяг 5 таким образом, что подвижные стержни с грузами 8 лежат в одной плоскости с горизонтальным стержнем 7, подвижной муфтой 4 и двумя тягами 5.
Установка содержит источник постоянного тока 9, отрицательная клемма которого через тумблер 10 соединена с отрицательной клеммой электродвигателя 6. Для создания необходимых оборотов электродвигателя 6 в цепь между электродвигателем 6 и источником постоянного тока 9 введены первая группа N резисторов 11 (R1, R2, …, RN) и вторая группа N резисторов 12 ( ,
,  , …,
, …,  ).
).
Для подключения необходимых резисторов из первой 11 и второй 12 групп N резисторов в установку введен переключатель на N положений 13, содержащий две (I и II) платы. Общий контакт первой платы переключателя на N положений 13 соединен с положительной клеммой электродвигателя 6, а подвижные контакты первой платы соединены с первыми выводами соответствующих резисторов первой группы N резисторов 11. Общий контакт второй платы переключателя на N положений 13 соединен с положительной клеммой источника постоянного тока 9, а подвижные контакты второй платы соединены с первыми выводами соответствующих резисторов второй группы N резисторов 12.
На одном из концов горизонтального стержня 7 установлена контактная пара 14, работающая на размыкание цепи. Если подвижные стержни с грузами 8 расположены вертикально, то контактная пара 14 замкнута. Если же подвижные стержни с грузами 8 распложены горизонтально, то контактная пара 14 размыкается. Для размыкания контактной пары 14 служит размыкающий стержень 15, установленный на первом конце подвижного стержня с грузом 8.
На валу установки 1 закреплены неподвижно два токоприемника 16. При этом подвижные контактные кольца токоприемников 16 соединены с контактной парой 14, а неподвижный контакт первого токоприемника 16 соединен со вторыми выводами резисторов первой 11 и второй 12 групп N резисторов, а неподвижный контакт второго токоприемника 16 соединен с положительной клеммой источника постоянного тока 9.
Для фиксации положения двух подвижных стержней с грузами 8 в вертикальном положении установка содержит два магнитных фиксатора 17, магниты которых расположены на противоположных концах горизонтального стержня 7, а металлические пластинки магнитных фиксаторов 17 расположены на первых концах подвижных стержней с грузами 8.
Для имитации головы вращающегося человека введена шарообразная рукоятка 18. Для опускания и поднимания подвижной муфты 4 вдоль вала установки 1 служит трубка 19, один конец которой неподвижно закреплен на подвижной муфте 4 таким образом, что вал установки 1 может свободно перемещается внутри трубки 19, а другой конец ее подвижно соединен с шарообразной рукояткой 18. Если рукой давим на шарообразную рукоятку 18, то посредством трубки 19 подвижная муфта 4 опускается по валу установки 1 вниз, подвижные стержни с грузами 8 принимают горизонтальное положение и под действием собственного веса фиксируются. При этом трубка 19 вращается, а шарообразная рукоятка 18, подвижно соединенная с трубкой 19, остается на месте. Если руку убираем с шарообразной рукоятки 18, то она вращается вместе с трубкой 19.
Рассмотрим работу предлагаемой установки (фиг.4). На ней возможно моделировать вращение человека с различным числом оборотов в секунду. Для моделирования требуемого числа оборотов в секунду в цепь между электродвигателем 6 и источником постоянного тока 9 введены первая группа N резисторов 11 и вторая группа N резисторов 12. Для подключения в цепь между электродвигателем 6 и источником тока 9 требуемых резисторов из первой 11 и второй 12 групп N резисторов служит переключатель на N положений 13, который содержит две платы. Если переключатель 13, например, стоит в первом положении (фиг.4), то в цепь подключаются резистор R1 первой группы N резисторов 11 и резистор  второй группы N резисторов 12.
второй группы N резисторов 12.
Включение установки осуществляется тумблером 10. Электродвигатель 6, установленный на подставке 3, приводит в движение вал установки 1, который соединен с валом электродвигателя 6.
С помощью шарообразной рукоятки 18, которая подвижно соединена с трубкой 19, поднимаем вверх подвижную муфту 4. Она, в свою очередь, с помощью двух тяг 5 поднимает оба подвижных стержня с грузами 8 в вертикальное положение. Оба подвижных стержня с грузами 8 в этом положении фиксируются с помощью магнитных фиксаторов 17, магниты которых расположены на противоположных концах горизонтального стержня 7, а металлические пластинки магнитного фиксатора 17 - на первых концах подвижных стержней с грузами 8. Момент инерции системы в этом случае будет минимальным и равным I1. Контактная пара 14 в этом случае находится в замкнутом состоянии. Через пару подвижных контактных колец токоприемника 16 замкнутая контактная пара 14 шунтирует сопротивление
второй группы N резисторов 12. В цепи между электродвигателем 6 и источником постоянного тока 9 оказывается включено только сопротивление R1 первой группой N резисторов 11. На электродвигатель 6 подается большее напряжение, и вал установки 1 вращается с максимальной угловой скоростью ω1.
Если шарообразную рукоятку 18 быстро опустить вниз, то она толкает вниз трубку 19 с подвижной муфтой 4, которая с помощью двух тяг 5 опускает оба подвижных стержня с грузами 8 в горизонтальное положение. Момент инерции системы в этом случае будет максимальным и равным I2. Размыкающий стержень 15 размыкает контактную пару 14, снимается шунтирование сопротивления
второй группы N резисторов 12. В цепи между электродвигателем 6 и источником постоянного тока 9 наряду с сопротивлением R1 первой группы N резисторов 11 включается еще последовательно сопротивление
второй группы N резисторов 12. Напряжение на входе электродвигателя 6 уменьшается, соответственно, вал установки 1 вращается с минимальной угловой скоростью ω2.
Момент инерции I1 вращающегося человека с угловой скоростью ω1 рассчитываем заранее численным методом, а неизвестный момент инерции I2 вращающегося человека с угловой скоростью ω2 определяем по закону сохранения момента импульса:
 .
.
Угловые скорости ω1 и ω2 определяем по формуле ω=2πn. Для этого с помощью секундомера определяем число оборотов в секунду n1 (человек с поднятыми руками) и n2 (человек с опущенными руками).
В этом процессе изменяется также кинетическая энергия системы:
 .
.
Обучающийся убеждается, что кинетическая энергия системы изменяется за счет работы, совершаемой человеком при подъеме и опускании рук.
Электродвигатель 6, источник постоянного тока 9, втулка 2, в которой вращается вал установки 1, тумблер 10, переключатель на N положений 13, первая 11 и вторая 12 группы N резисторов, а также неподвижные контакты обоих токоприемников 16 установлены в корпусе установки на подставке 3.
Установка для моделирования закона сохранения момента импульса, содержащая подставку, втулку, вал установки, установленный во втулке перпендикулярно подставке, подвижную муфту, насаженную на вал установки, две тяги, первыми концами шарнирно соединенные на противоположных сторонах подвижной муфты, отличающаяся тем, что в нее введены тумблер, первая группа N резисторов, вторая группа N резисторов, электродвигатель, установленной на подставке, вал которого соединен с валом установки, горизонтальный стержень, неподвижно закрепленный симметрично и перпендикулярно валу установки, два подвижных стержня с грузами, первыми концами шарнирно соединенные с концами горизонтального стержня, а на вторых концах их размещены равные по весу грузы, при этом середины подвижных стержней с грузами шарнирно соединены со вторыми концами обеих тяг, источник постоянного тока, отрицательная клемма которого через тумблер соединена с отрицательной клеммой электродвигателя, переключатель на N положений, содержащий две платы, при этом общий контакт первой платы соединен с положительной клеммой электродвигателя, а подвижные контакты первой платы соединены с первыми выводами соответствующих резисторов первой группы N резисторов, а общий контакт второй платы соединен с положительной клеммой источника постоянного тока, а подвижные контакты второй платы соединены с первыми выводами соответствующих резисторов второй группы N резисторов, контактная пара, установленная на одном из концов горизонтального стержня, размыкающий стержень, установленный на первом конце подвижного стержня с грузом напротив контактной пары, два токоприемника, закрепленные неподвижно на валу установки, при этом подвижные контактные кольца токоприемников соединены с контактной парой, а неподвижный контакт первого токоприемника соединен со вторыми выводами резисторов первой и второй групп N резисторов, а неподвижный контакт второго токоприемника соединен с положительной клеммой источника постоянного тока, магнитные фиксаторы двух подвижных стержней с грузами, магниты которых расположены на противоположных концах горизонтального стержня, а металлические пластинки магнитного фиксатора - на первых концах подвижных стержней с грузами, шарообразная рукоятка, имитирующая голову вращающегося человека, трубка, один конец которой неподвижно закреплен на подвижной муфте таким образом, что вал установки может свободно перемещаться внутри нее, а другой конец трубки подвижно соединен с шарообразной рукояткой.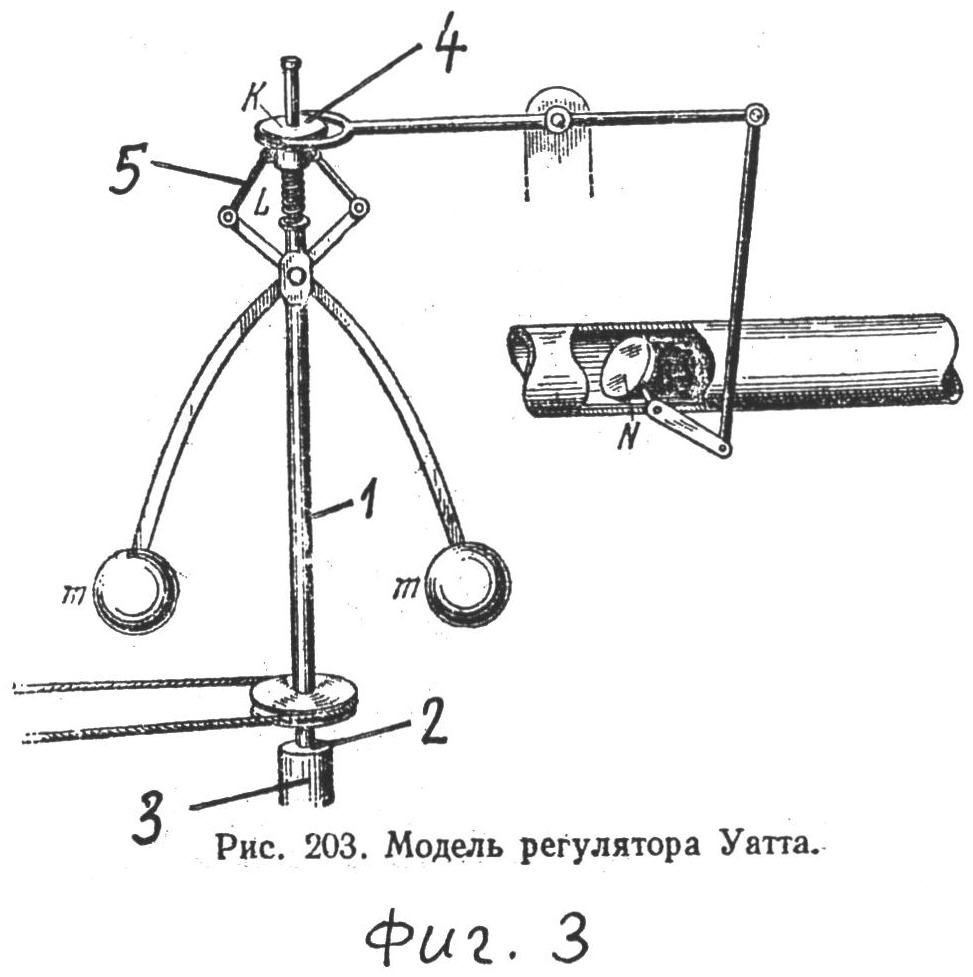
Оптико-электронная система для определения спектроэнергетических параметров и координат источника лазерного излучения инфракрасного диапазона
Установка для моделирования электростатического поля на границе раздела двух диэлектриков
Способ оценки уровня загрязнения акваторий по гиперспектральным данным аэрокосмического зондирования
Способ ведения спутниковой съемки при дистанционном зондировании
Способ выделения вектора признаков для распознавания изображений объектов и устройство для его осуществления
Акустооптический приемник
Способ автономного оценивания изменений орбиты визируемого космического аппарата
Способ управления движением ракеты космического назначения при выведении космических объектов на орбиту
Способ интерактивного обучения
Оптико-электронная система для определения спектроэнергетических параметров и координат источника лазерного излучения инфракрасного диапазона
Установка для моделирования электростатического поля на границе раздела двух диэлектриков
Способ оценки уровня загрязнения акваторий по гиперспектральным данным аэрокосмического зондирования
Способ ведения спутниковой съемки при дистанционном зондировании
Способ выделения вектора признаков для распознавания изображений объектов и устройство для его осуществления
Акустооптический приемник
Способ автономного оценивания изменений орбиты визируемого космического аппарата
Способ управления движением ракеты космического назначения при выведении космических объектов на орбиту

