Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА
Вид РИД
Изобретение
Предлагаемое изобретение относится к измерительной технике, а именно к способам измерения и упреждающего контроля на этапах изготовления и исследования прецизионных кварцевых маятниковых акселерометров.
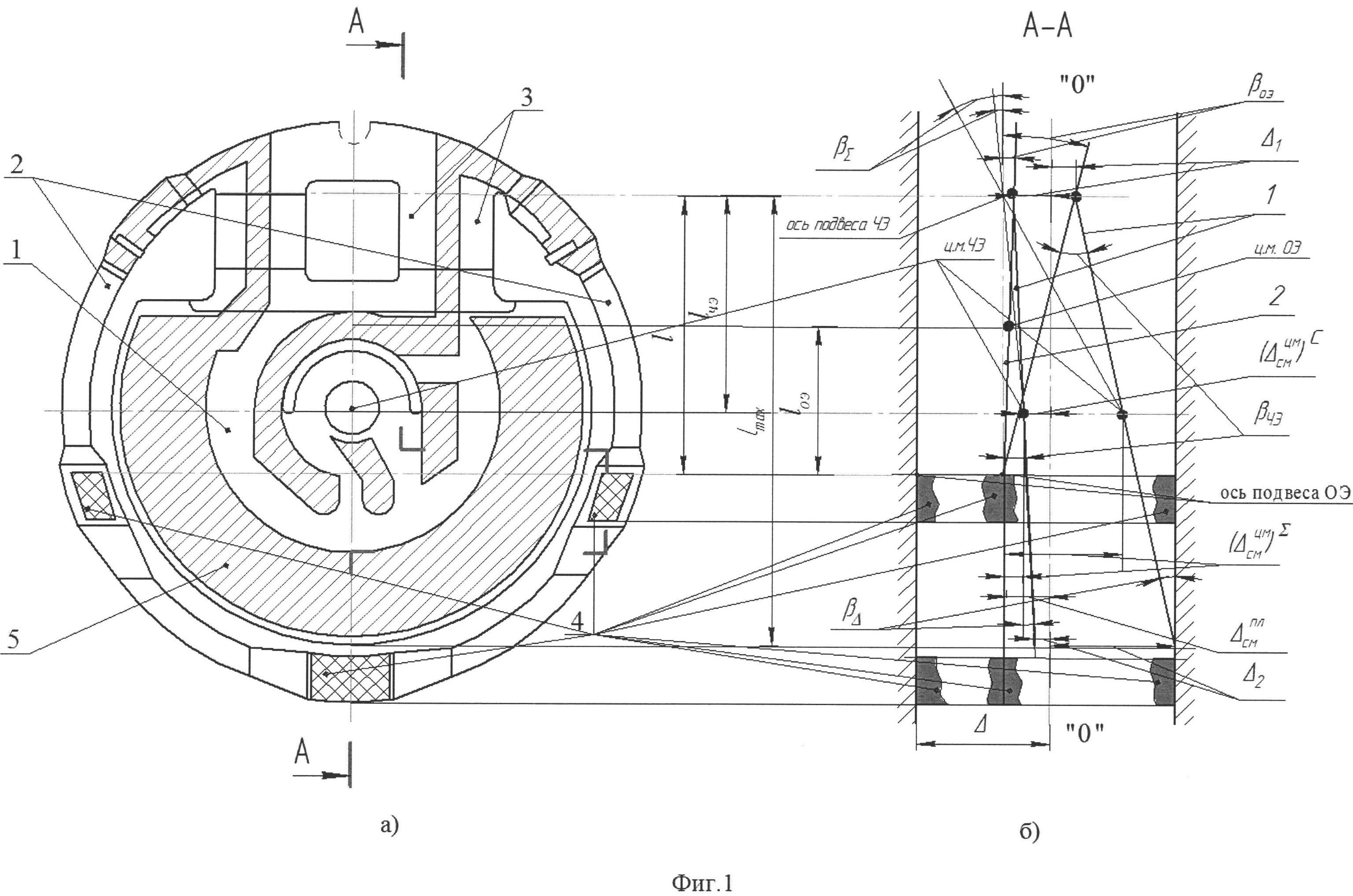
В высокоточных приборах, предназначенных для измерения линейных ускорений движущихся объектов, находит применение пластина маятникового акселерометра [1], аналогичная приведенной на фиг.1а, б.
Пластина маятникового акселерометра включает в себя опорный (ОЭ) и чувствительный (ЧЭ) подвижные элементы, выполненные из наиболее совершенного упругого материала, в частном случае, из кварцевого стекла.
На фиг.1а чувствительный элемент 1 (ЧЭ) и опорный элемент 2 (ОЭ) разделены прорезью вдоль периметра пластины; подвес ЧЭ выполнен в виде упругих перемычек 3, связующих ОЭ и ЧЭ; ОЭ фиксируется в корпусе акселерометра консольно на двухсторонних трех выступах 4, расположенных с противоположной оси подвеса ЧЭ стороне.
Центр масс ЧЭ (ц.м. ЧЭ), с учетом обмоток датчика силы и обкладок 5 датчика смещения ц.м. ЧЭ (емкостного дифференциального датчика угла), определяется точкой пересечения осей симметрии ЧЭ пластины акселерометра (фиг.1а). При этом ц.м. ЧЭ смещен относительно противоположных выступов 4 (подвеса ОЭ) в сторону подвеса ЧЭ. Перпендикуляр из ц.м. ЧЭ к плоскости пластины (фиг.1а) является осью чувствительности акселерометра для моментов небаланса, тяжения и изгиба элементов пластины.
Таким образом, подвижные элементы пластины маятникового акселерометра по способу нагружения подобны консольным балкам, работающим на изгиб [5], предельные значения угла поворота (рабочая зона) которых ограничены прочностью упругого подвеса ЧЭ или конструктивными особенностями «заделки» ОЭ.
Исполнение пластины предполагает, при смещении ц.м. ЧЭ от линии «0-0» (фиг.1б), высокую стабильность положения оси чувствительности в широком диапазоне температур за счет оптимальной (соизмеримой) угловой жесткости элементов пластины. В рабочей зоне пластины ожидается плоскопараллельное перемещение ЧЭ, которое обеспечивается соизмеримой угловой жесткостью подвесов ОЭ и ЧЭ в точках фиксации (заделки) ОЭ с корпусом акселерометра и перемычек, связующих ЧЭ с ОЭ. При этом стабильность выходного сигнала акселерометра обеспечивает «температурная компенсация».
Известные способы выставки углового положения оси чувствительности акселерометра не выявляют угловую жесткость подвесов ОЭ и ЧЭ, а также смещение ц.м. ЧЭ и подвеса ОЭ в рабочей зоне пластины на этапах изготовления акселерометра и ввода температурной компенсации.
Смещение ц.м. ЧЭ в условиях эксплуатации возможно при дрейфе (смещении) нуля со стороны входа обратной связи акселерометра. При этом, из-за температурной недокомпенсации в отсутствии ускорения силы тяжести, изменяется выходной сигнал. Кроме того, при наличии смещения подвеса ОЭ в отсутствии соизмеримой угловой жесткости подвесов ОЭ и ЧЭ, возможно соприкосновение края ЧЭ с корпусом и, тем самым, возникновение ложного выходного сигнала.
Для измерения ускорения с высокой точностью предлагается, на этапах изготовления и исследования маятникового акселерометра, прогнозировать угловое положение оси чувствительности путем определения параметров акселерометра, а именно угловой жесткости подвесов ОЭ и ЧЭ, смещение подвеса ОЭ и ц.м. ЧЭ пластины.
Известны следующие способы определения параметров акселерометра, обеспечивающих измерение ускорения с высокой точностью в условиях эксплуатации.
В качестве аналога известен способ определения стабильности положения оси чувствительности маятникового компенсационного акселерометра, описанный в [2]. Способ осуществляется путем определения поворота плоскости, в которой лежит ось чувствительности, относительно связанной с корпусом базовой плоскости под воздействием дестабилизирующих факторов.
Для этого, до и после воздействия дестабилизирующих факторов, с помощью автоколлиматора ориентируют базовую плоскость горизонтально. Затем поворачивают акселерометр вокруг оси подвеса маятника в положение, при котором ось чувствительности горизонтальна, при этом выходной сигнал равен нулю, и измеряют угол поворота акселерометра. О стабильности положения оси чувствительности судят по разности измеренных углов поворота до и после воздействия дестабилизирующих факторов.
Известен способ контроля до герметизации маятникового поплавкового компенсационного акселерометра, описанный в [3]. Способ осуществляется путем измерения выходных сигналов, коэффициента преобразования и положения измерительной оси акселерометра до и после механических воздействий. При этом устанавливают прибор маятником вниз, а механические воздействия проводят при разорванной обратной связи путем подачи в обмотку моментного датчика переменного тока с частотой собственных колебаний подвижной системы.
Способы, описанные в [2] и [3], не позволяют прогнозировать стабильность положения оси чувствительности при смещении центра масс ЧЭ из-за дрейфа нуля со стороны входа обратной связи акселерометра.
Наиболее близким, принятым за прототип, является способ определения параметров прецизионных акселерометров, описанный в [4].
Способ заключается в том, что акселерометр устанавливают на вертикальном основании в положение верхней маятниковости, поворачивают основание вокруг горизонтальной оси на углы 90, 180, 270° от начального положения, затем акселерометр разворачивают на основании вокруг оси чувствительности на угол 180°, при этом вычисляют по его выходным сигналам отдельно погрешности базовых установочных элементов акселерометра и угол деформации основания.
Способ, описанный в [4], не позволяет прогнозировать выходной сигнал и стабильность положения оси чувствительности акселерометра в условиях эксплуатации.
Задачей изобретения является:
- определение параметров пластины маятникового акселерометра, а именно угловой жесткости подвесов ОЭ и ЧЭ, смещения подвеса ОЭ и ц.м. ЧЭ на этапах изготовления и исследования акселерометра;
- прогнозирование стабильности положения оси чувствительности пластины и уровня выходного сигнала при дрейфе нуля со стороны входа обратной связи акселерометра.
Технический результат достигается тем, что акселерометр располагают в первом положении на подвижном основании, при котором ось чувствительности пластины акселерометра лежит в плоскости горизонта перпендикулярно горизонтальной оси вращения основания, при этом, согласно изобретению, подают калиброванные по уровню и знаку электрические сигналы Uсм на первый вход устройства обратной связи, для каждого сигнала Uсм измеряют выходной сигнал Uвых с выхода, и сигнал смещения  , на втором входе устройства обратной связи, и определяют зависимость Uвых от
, на втором входе устройства обратной связи, и определяют зависимость Uвых от  , (статическую характеристику акселерометра «выходной сигнал» - «сигнал смещения»), затем устанавливают акселерометр во второе положение поворотом основания на малый угол φосн≈sinφосн и в этом положении повторяют указанные действия первого положения, затем вычисляют параметры акселерометра.
, (статическую характеристику акселерометра «выходной сигнал» - «сигнал смещения»), затем устанавливают акселерометр во второе положение поворотом основания на малый угол φосн≈sinφосн и в этом положении повторяют указанные действия первого положения, затем вычисляют параметры акселерометра.
Предлагаемый способ определения параметров акселерометра имеет следующие преимущества:
- прогнозируется стабильность положения оси чувствительности при смещении ц.м. ЧЭ из-за дрейфа нуля со стороны входа устройства обратной связи, а также уровень выходного сигнала акселерометра в отсутствии ускорения силы тяжести;
- возможно исследование акселерометров как с аналоговой, так и с цифровой обратной связью.
Предлагаемый способ определения параметров акселерометра предусматривает проведение следующих операций:
1. Устанавливают базовую плоскость акселерометра на подвижном основании осью чувствительности в плоскости горизонта и перпендикулярно горизонтальной оси вращения основания (приспособления, установленного на оптической делительной головке - ОДГ). При этом базовую плоскость акселерометра устанавливают аналогично [2] и [4].
2. С источника калиброванных по уровню и знаку электрических сигналов подают, на первый вход устройства обратной связи, сигнал Uсм («задаваемый сигнал смещения»), имитирующий смещение центра масс ЧЭ.
3. Измеряют уровень сигнала
на втором входе устройства обратной связи, поданного с датчика смещения (через предварительный усилитель-преобразователь) («сигнал смещения») и уровень сигнала Uвых со стороны выхода устройства обратной связи («выходной сигнал»).
4. Повторяют операции по пп.2,3 для всего требуемого диапазона значений «задаваемого сигнала смещения».
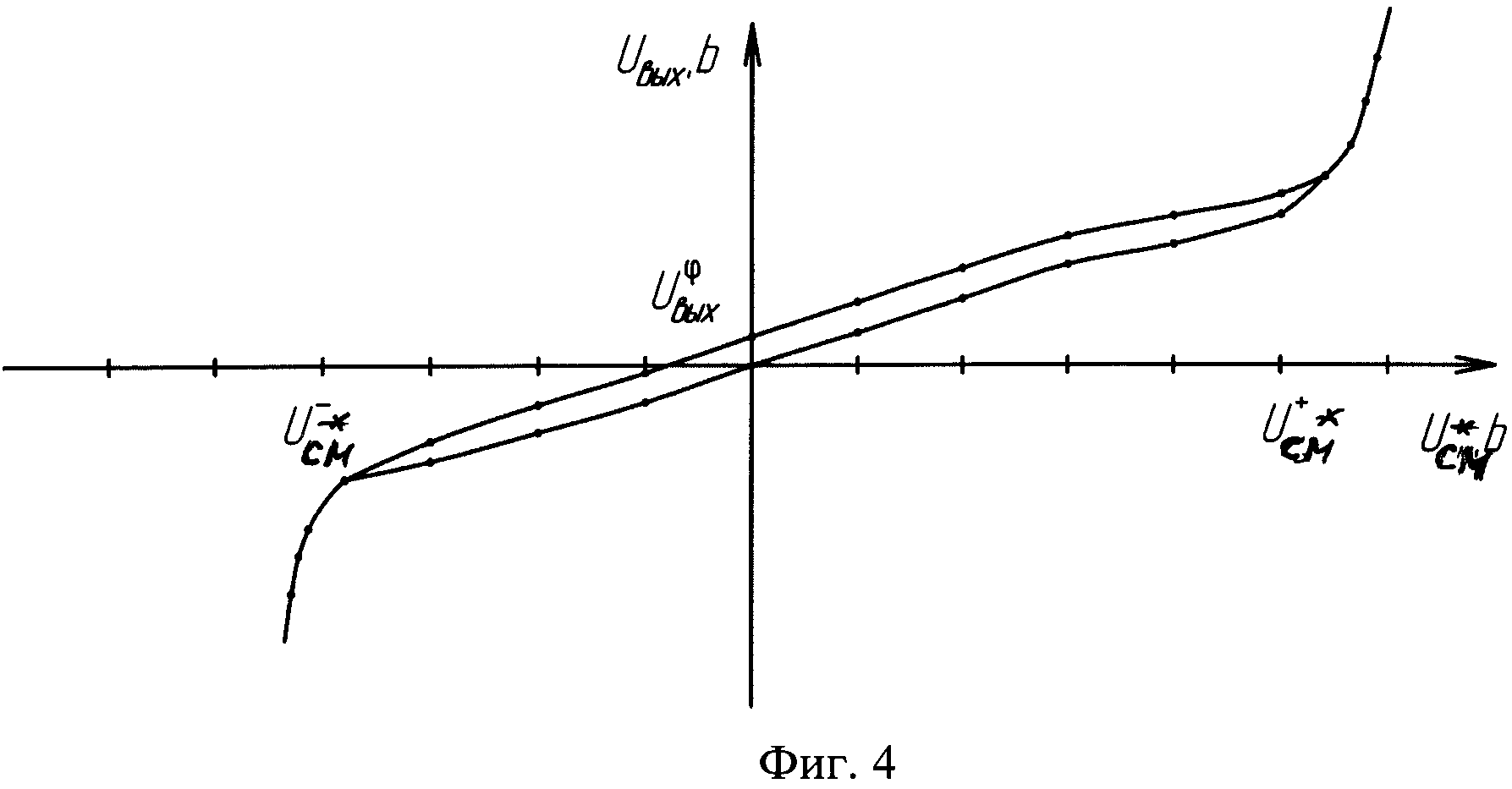
5. Строят зависимость выходного сигнала Uвых от сигнала смещения
(«выходной сигнал» - «сигнал смещения», фиг.4).
6. Поворачивают оптическую делительную головку на малый угол φосн, sinφосн≈φосн.
7. Повторяют операции по пп.2, 3, 4, 5 для всего требуемого диапазона значений задаваемых сигналов.
8. Вычисляют параметры пластины маятникового акселерометра.
Сущность изобретения можно показать с учетом принятых предположений:
- пластина (фиг.1а, б) двухмассовая двумерная механическая система с сосредоточенными параметрами;
- угловые квазилинейные деформации элементов пластины в рабочей зоне достаточно малы;
- центр масс ЧЭ и подвес ОЭ в рабочей зоне 2Δ смещены относительно
внутренних поверхностей корпуса акселерометра (фиг.1 б);
- угловая жесткость подвеса ЧЭ и ОЭ соизмеримая;
На фиг.2 приведен пример устройства для реализации заявленного способа:
1 - пластина маятникового акселерометра;
2 - воспринимающая часть пластины;
3 - подвижная часть пластины;
4 - датчик смещения ц.м. ЧЭ;
5 - магнитоэлектрический датчик силы;
6 -предварительный усилитель-преобразователь (последовательно соединенные предварительный усилитель и фазочувствительный выпрямитель);
7 - устройство обратной связи;
8 - источник электрического сигнала, калиброванного по уровню и знаку;
Мдм - момент датчика силы 5;
M∑ - суммарный момент дебаланса и тяжения пластины;
Муп - упругий момент при угловой деформации подвижной части пластины;
β∑ - суммарная угловая деформация подвижной части пластины;
Uду- сигнал с датчика смещения ц.м. ЧЭ;
- «сигнал смещения» с предусилителя 6;
Uсм - «задаваемый сигнал смещения» с источника 8;
Uвых - «выходной сигнал» с выхода устройства 7
iдм - выходной ток через обмотки датчика силы 5;
Подвижная часть 3 связана с датчиком смещения 4, выход которого через последовательное соединение усилителя-преобразователя 6 и устройства 7 обратной связи акселерометра связан с датчиком силы 5.
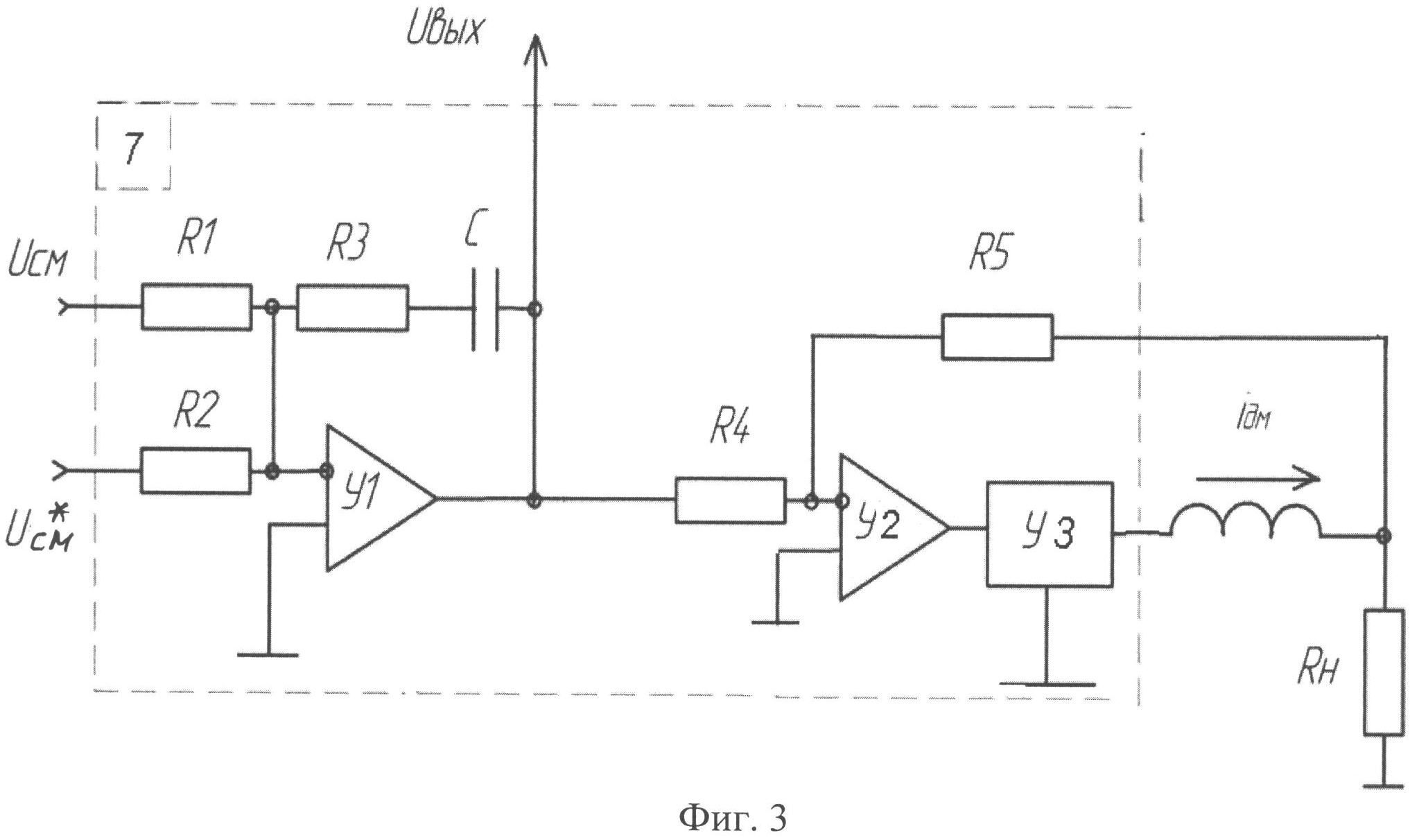
Устройство обратной связи (формирователь сигнала обратной связи) (фиг.3) выполнено, например, на основе интегро-дифференцирующего усилителя (У1) и усилителя мощности на основе усилителей У2 и У3. Усилитель У1 инвертирующим входом через резистор R1 соединен с выходом источника 8. Выход усилителя У1 через цепь последовательно соединенных конденсатора C и резистора R3 соединен с инвертирующим входом усилителя У1, соединенным через резистор R2 с выходом фазочувствительного выпрямителя усилителя-преобразователя. Усилитель У2 соединен инвертирующим входом через резистор R4 с выходом усилителя У1. Выход усилителя У2 через усилитель У3 (эмиттерный повторитель по схеме Дарлингтона) соединен с началом обмотки датчика силы, конец которой соединен через нагрузку Rн с общей шиной, а также через резистор R5 с инвертирующим входом усилителя У2. Резисторы R1 и R2 усилителя У1, одними выводами соединенные с инвертирующим входом У1, другими выводами образуют соответственно первый и второй входы устройства обратной связи, а выходом устройства обратной связи может быть выход усилителя У1.
Устройство обратной связи может быть цифровым и выполнено на базе процессора с ЦАП на выходе, при этом в усилитель-преобразователь вводится АЦП.
Параметры акселерометра определяются из статической характеристики (зависимости) «выходной сигнал» - «сигнал смещения» (фиг.4).
Пологие участки статической характеристики на фиг.4 формируются при имитации смещения ц.м. ЧЭ до касания края ЧЭ противоположных сторон рабочей зоны пластины, крутые участки на фиг.4 - последующим смещением ц.м. ЧЭ до противоположных сторон рабочей зоны пластины.
Наклон пологих участков характеристики определяется в основном суммарной угловой жесткостью пластины и моментом тяжения датчика смещения. При этом до имитации смещения ц.м. ЧЭ ось чувствительности акселерометра выставляется в горизонт (положение основания «угол 0») в соответствии с [2] и [4].
При имитации смещения ц.м. ЧЭ выполняются условия


где




Выражения (1)-(6) используются при определении параметров акселерометра по кривой на фиг.3 и сформированы из математической модели вида

где CОС - коэффициент передачи цепи «датчик смещения - датчик силы» (фиг.2), г·см/рад,




Если справедливы соотношения sin βэ≈βэ, тогда


Математическая модель (7) с учетом (12) и (13) имеет вид

где  ,
,  .
.
Математическая модель (14) используется при прогнозировании выходного сигнала и положения оси чувствительности акселерометра по формулам


В выражениях (1)-(16) введены обозначения:
βчэ, βоэ - угловая деформация ЧЭ и ОЭ, рад,
 (lчэ - расстояние между ц.м. ЧЭ и подвесом ЧЭ, см, l - расстояние между подвесами ОЭ и ЧЭ, см),
(lчэ - расстояние между ц.м. ЧЭ и подвесом ЧЭ, см, l - расстояние между подвесами ОЭ и ЧЭ, см),
 - суммарное смещение (расстояние ц.м. ЧЭ от подвеса ОЭ на фиг.1б), мкм,
- суммарное смещение (расстояние ц.м. ЧЭ от подвеса ОЭ на фиг.1б), мкм,
 - начальное (собственное) смещение ц.м. ЧЭ от линии «0-0» на фиг.1б, мкм,
- начальное (собственное) смещение ц.м. ЧЭ от линии «0-0» на фиг.1б, мкм,
 - смещение подвеса ОЭ (расстояние между подвесом ОЭ и линией «0-0» на фиг.1б), мкм,
- смещение подвеса ОЭ (расстояние между подвесом ОЭ и линией «0-0» на фиг.1б), мкм,
 - смещение ц.м. ЧЭ при подаче сигнала UCM с источника 8, мкм,
- смещение ц.м. ЧЭ при подаче сигнала UCM с источника 8, мкм,
Kвх - коэффициент преобразования цепи «сигнал  - смещение ц.м. ЧЭ», В/мкм,
- смещение ц.м. ЧЭ», В/мкм,
Cоэ, Cчэ - угловая жесткость подвесов ОЭ и ЧЭ, г·см/рад,
 ,
,  - моменты небаланса ОЭ и ЧЭ, г·см,
- моменты небаланса ОЭ и ЧЭ, г·см,
 ,
,  - момент сопротивления ОЭ и ЧЭ с учетом тяжения датчика смещения, г·см,
- момент сопротивления ОЭ и ЧЭ с учетом тяжения датчика смещения, г·см,
mоэ, mчэ - масса ОЭ и ЧЭ, г,
lоэ - расстояние между ц.м. ОЭ и подвесом ОЭ, см,
q - ускорение, g,
φосн - угол поворота основания (угол ориентации корпуса акселерометра относительно ускорения),
Способ определения параметров пластины для прогнозирования по формулам (15) и (16) осуществляют следующим образом:
- вычисляют коэффициенты Kвх и Kвых по формулам


где  ,
,  - сигналы
- сигналы  с предусилителя 7 при касании ц.м. ЧЭ противоположных сторон рабочей зоны пластины, (
с предусилителя 7 при касании ц.м. ЧЭ противоположных сторон рабочей зоны пластины, ( ,
на крутых участках фиг.4 не показаны),
,
на крутых участках фиг.4 не показаны),
2Δ - расстояние между противоположными сторонами рабочей зоны,
,  - момент дебаланса ЧЭ и сигналы
- момент дебаланса ЧЭ и сигналы  при ускорении силы тяжести ±1g,
при ускорении силы тяжести ±1g,
- смещение (собственное) ц.м. ЧЭ (от линии «0-0» на фиг.1б) определяется по формуле

где  - сигналы
- сигналы  при касании края ЧЭ противоположных сторон рабочей зоны пластины (конец пологого участка на фиг.4),
при касании края ЧЭ противоположных сторон рабочей зоны пластины (конец пологого участка на фиг.4),
- суммарная жесткость пластины определяется (с учетом (2) и (6)) по формуле

где ΔUвых - приращение сигнала Uвых при подаче сигнала Uсм для смещения ц.м. ЧЭ от
до  относительно линии «0-0». При этом, если
относительно линии «0-0». При этом, если  , сигнал Uсм определяется по формуле
, сигнал Uсм определяется по формуле

- смещение подвеса ОЭ определяется по формуле (с учетом (2) и (6))

где ΔUвых - приращение сигнала Uвых при подаче сигнала 0.5Uсм для смещения ц.м. ЧЭ от
до линии «0-0».
При этом приращение суммарного момента M∑ практически отсутствует, а ц.м. ЧЭ равноудален от противоположных сторон рабочей зоны пластины (при перемещении ц.м. ЧЭ на
).
- угловую жесткость подвеса ЧЭ определяют (до сборки пластины или из кривой на фиг.4) по формулам


В выражении (23) введены следующие обозначения:
α - угловая деформация подвеса ЧЭ, измеряемая автоколлиматором на этапе изготовления пластины (до сборки),
mчэ - масса ЧЭ после сборки,
mK - масса катушки датчика силы,
lчэ - расстояние между ц.м. ЧЭ и подвесом ЧЭ.
Выражение (24) сформировано с учетом (4) и (15), при этом


где  - сигналы
- сигналы  при касании края ЧЭ противоположных сторон рабочей зоны,
при касании края ЧЭ противоположных сторон рабочей зоны,  - сигналы
- сигналы  при касании ц.м. ЧЭ противоположных сторон рабочей зоны, lmax - расстояние между краем ЧЭ и подвесом ЧЭ.
при касании ц.м. ЧЭ противоположных сторон рабочей зоны, lmax - расстояние между краем ЧЭ и подвесом ЧЭ.
- угловая жесткость подвеса ОЭ определяется по формуле (с учетом (6) и (20))

- маятниковость ОЭ определяется по формуле (с учетом (2) и (5))

где  - приращение сигнала Uвых при повороте ОДГ на угол φосн.
- приращение сигнала Uвых при повороте ОДГ на угол φосн.
- суммарный момент сопротивления пластины при смещении ц.м. ЧЭ определяется по формуле (с учетом (2) и (6))

где (Uвых)см - сигнал Uвых при подаче сигналов Uсм (для имитации смещения ц.м. ЧЭ) в требуемом диапазоне значений «задаваемого сигнала смещения». При этом калибровочное смещение  в (4) определяется по формуле
в (4) определяется по формуле

На фиг.3 уменьшение наклона статической характеристики на пологом участке практически определяется моментом тяжения датчика смещения, вычисляемым по формуле (с учетом (5) и (9))

Путем компьютерного моделирования по математической модели (14) с использованием определяемых параметров пластины возможно исследование влияния дебаланса элементов пластины  и
и  на стабильность положения оси чувствительности и на выходной сигнал акселерометра.
на стабильность положения оси чувствительности и на выходной сигнал акселерометра.
При этом смещение подвеса и края ЧЭ (фиг.1б) определяются по формулам


Таким образом, заявлен способ определения параметров прецизионного кварцевого маятникового акселерометра, заключающийся в том, что на подвижном основании располагают акселерометр в первом положении, при котором ось чувствительности пластины акселерометра лежит в плоскости горизонта и перпендикулярно горизонтальной оси вращения основания. Отличительная особенность способа заключается в том, что подают калиброванные по уровню и знаку электрические сигналы на первый вход устройства обратной связи, имитируя смещение чувствительного элемента акселерометра, для каждого калиброванного сигнала измеряют сигнал Uвых на выходе и сигнал
на втором входе устройства обратной связи и определяют зависимость Uвых от
, затем устанавливают акселерометр во второе положение поворотом основания на малый угол φосн≈sinφосн и в этом положении повторяют действия, выполненные при первом положении, затем вычисляют параметры акселерометра.
Источники информации
1. RU 2087927 C1. Опубл. 20.08.97.
2. SU 1839841 A1. Опубл. 10.08.05
3. SU 1840726 A1. Опубл.27.07.08.
4. RU 02117950 C1. Опубл. 20.08.98.
5. Распопов В.Я. Микромеханические приборы. - М.: Машиностроение, 2007.
6. Алексеенко А.Г., Шагурин И.И. Микросхемотехника. - М.: Радио и связь, 1982.
Способ определения параметров прецизионного кварцевого маятникового акселерометра, заключающийся в том, что на подвижном основании располагают акселерометр в первом положении, при котором ось чувствительности пластины акселерометра лежит в плоскости горизонта и перпендикулярно горизонтальной оси вращения основания, отличающийся тем, что подают калиброванные по уровню и знаку электрические сигналы на первый вход устройства обратной связи, имитируя смещение чувствительного элемента акселерометра, для каждого калиброванного сигнала измеряют сигнал U на выходе и сигнал на втором входе устройства обратной связи и определяют зависимость U от , затем устанавливают акселерометр во второе положение поворотом основания на малый угол φ≈sinφ и в этом положении повторяют действия, выполненные при первом положении, затем вычисляют параметры акселерометра.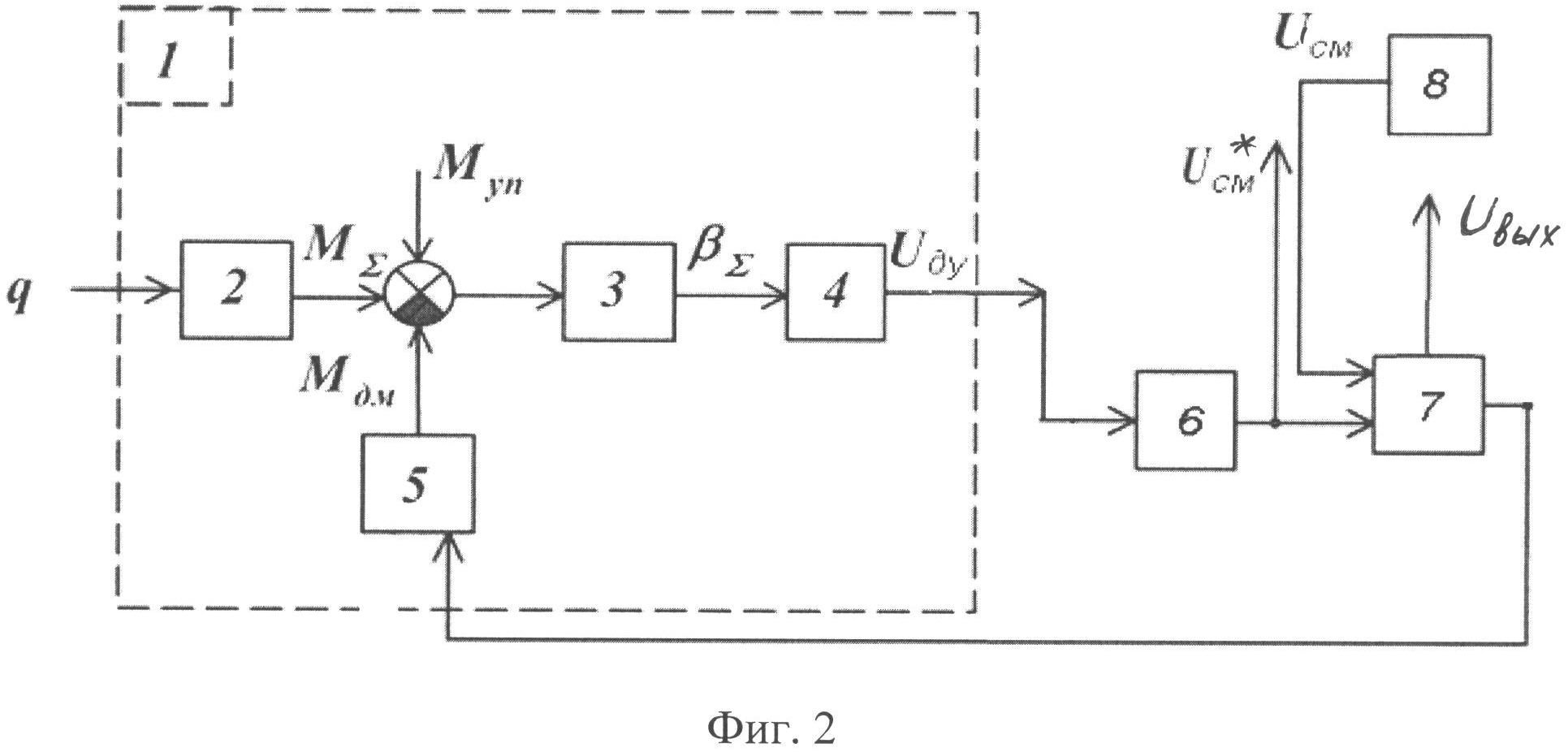
Компактированное металлургическое изделие, способ производства компактированного металлургического изделия и применение компактированного металлургического изделия
Многоканальный преобразователь напряжений в шим-сигналы
Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости
Способ производства горячекатаного проката повышенной прочности
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения
Компактированное металлургическое изделие, способ производства компактированного металлургического изделия и применение компактированного металлургического изделия
Многоканальный преобразователь напряжений в шим-сигналы
Универсальный широкодиапазонный стенд для контроля измерителей угловой скорости
Способ производства горячекатаного проката повышенной прочности
Волоконно-оптический измеритель угловой скорости
Способ определения параметров модели погрешностей измерений акселерометров инерциальной навигационной системы по измерениям спутниковой навигации
Способ определения параметров модели погрешностей измерений акселерометров ведомой инерциальной навигационной системы по измерениям эталонной инерциальной навигационной системы
Приемопередатчик последовательного интерфейса с элементом гальванической развязки
Стенд для измерения вибрационных реактивных моментов гиромотора
Термоинвариантный измеритель линейного ускорения

