Результат интеллектуальной деятельности: ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННО-УПРАВЛЯЕМОГО ПОДВИЖНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области приборостроения, а именно к бортовым информационно-вычислительным системам и устройствам, обеспечивающим решение задач управления движением дистанционно-управляемых подвижных объектов, реализацию задач навигации и топопривязки, представление индикационно-управляющих параметров в реальном текущем времени.
Известен программно-аппаратный комплекс топопривязчика (см. патент №2468338 С1, G01С 23/00, 27.11.2012 г.), принятый за прототип. Программно-аппаратный комплекс содержит комплекс аппаратных средств бортовой цифровой вычислительной машины, устройства, обеспечивающие взаимосвязь с бортовым оборудованием, проведение вычислительных процессов и представление индикационно-управляющих параметров, программно-алгоритмические средства. Связь комплекса аппаратных средств бортовой цифровой вычислительной машины с бортовым оборудованием осуществляется через дополнительные согласующие модули: блок согласования, выполненный с возможностью обеспечения управления работой первичных навигационных датчиков и состоящий из центрального процессора, приемопередатчика интерфейса RS-232, приемопередатчика интерфейса радиального последовательного, модулей памяти, буферированного регистра разовых команд ввода-вывода и модуля питания, блок обработки данных, выполненный с возможностью приема информации от датчика температуры и измерителя цифрового атмосферного давления, ее преобразования и вычисления значения высоты, а также для выработки напряжения питания для датчиков и состоящий из четырех субблоков: контроллера, интерфейса, стабилизатора напряжения и инвертора. Программно-аппаратный комплекс дополнительно оснащен вспомогательной ЭВМ, выполняющей задачи по хранению, отображению, обработке информации. Комплекс программно-алгоритмических средств выполнен в виде специального программно-математического обеспечения, выполненного с возможностью решения прямой и обратной навигационных задач, комплексирования сигналов навигационных систем, работы с цифровыми электронными картами, поддержки интерфейса оператора, решения сервисных задач.
Недостатками прототипа являются:
- высокая конфигуративная сложность системы;
- отсутствие возможности внедрения гибких алгоритмов управления;
- ограниченные возможности применения.
Предлагаемым изобретением решается задача по расширению интеллектуальных и функциональных возможностей информационно-вычислительных систем дистанционно-управляемых подвижных объектов.
Технический результат, получаемый при осуществлении изобретения, заключается в создании информационно-вычислительной системы дистанционно-управляемого подвижного объекта, обеспечивающей сбор данных и управление сложными электромеханическими системами подвижного объекта за счет интеллектуального аппаратного обеспечения.
Указанный технический результат достигается тем, что в предлагаемой информационно-вычислительной системе дистанционно-управляемого подвижного объекта, содержащей бортовую цифровую вычислительную машину, обеспечивающую взаимосвязь через дополнительные согласующие модули с бортовым оборудованием, проведение вычислительных процессов, работу с цифровыми электронными картами, поддержку интерфейса оператора и представление индикационно-управляющих параметров, программно-алгоритмические средства, новым является то, что информационно-вычислительная система оснащена двумя бортовыми цифровыми вычислительными машинами в виде промышленных одноплатных компьютеров: первый компьютер для обработки основных алгоритмов движения, управления, ориентации в пространстве, решения информационных и аналитических задач, второй компьютер для обработки видеосигнала, поступающего с видеокамер дистанционно-управляемого подвижного объекта, компьютеры, видеокамеры через сетевой коммутатор связаны с одноплатной платформой, сформированной на базе программируемой логической интегральной схемы и связанной с управляющими каналами правого и левого рулевого механизма, коробки переключения передач, рычага газа и информационными каналами инерциальной системы ориентации в пространстве, спутниковой навигационной системы, одометрическими и ультразвуковыми датчиками, а также с аппаратными средствами подвижного объекта: тахометром и спидометром.
Оснащение информационно-вычислительной системы двумя бортовыми цифровыми вычислительными машинами в виде промышленных одноплатных компьютеров позволяет:
- разделить информационные потоки канала системы технического зрения подвижного объекта и каналов системы управления движением и ориентации;
- обеспечить формирование управляющих алгоритмов, определяющих направление, скорость, направление движения.
Соединение компьютеров, видеокамер через сетевой коммутатор с одноплатной платформой, сформированной на базе программируемой логической интегральной схемы, позволяет:
- проводить отработку основных алгоритмов, обеспечивающих управляемость приводами и ориентацию подвижного объекта на местности;
- при необходимости за счет применения программируемой логической интегральной схемы сформировать новый облик системы сбора данных и управления;
- обеспечить наличие небходимого количества линий аналогового и цифрового ввода/вывода на одной плате.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежом, где показана структурная схема информационно-вычислительной системы дистанционно-управляемого подвижного объекта.
Информационно-вычислительная система (ИВС) дистанционно-управляемого подвижного объекта состоит из двух бортовых цифровых вычислительных машин в виде промышленных одноплатных компьютеров: первого компьютера (К) 1 для обработки основных алгоритмов движения, управления, ориентации в пространстве, решения информационных и аналитических задач, второго одноплатного компьютера (К) 2 для обработки видеосигнала, поступающего с видеокамер (ВК) 3 дистанционно-управляемого подвижного объекта. Первый компьютер 1 связан с одноплатной платформой (П) 4, сформированной на базе программируемой логической интегральной схемы (ПЛИС) 5, которая в свою очередь связана с управляющими каналами правого и левого рулевого механизма (ПРМ и ЛРМ) 6 и 7, коробки переключения передач (КПП) 8, рычага газа (РГ) 9, с информационными каналами инерциальной системы ориентации в пространстве (ИСОП) 10, спутниковой навигационной системы (СНС) 11, одометрическими и ультразвуковыми датчиками (ОД и УЗД) 12 и 13, а также с аппаратными средствами подвижного объекта: тахометром (Т) 14 и спидометром (С) 15. Платформа 4 имеет промышленный процессор (ПП) 16, позволяющий создавать многопоточные встраиваемые системы для детерминированного управления, анализа, регистрации данных и создания протоколов связи, а также аналоговые и цифровые устройства ввода / вывода (АУ и ЦУ) 17 и 18. Управление правым и левым рулевым механизмами 6 и 7 с платформы 4 осуществляется через линейные двигатели (ЛД) 19 и 20 и сервоусилители (СУ) 21 и 22. Управление механизмом коробки переключения передач 8 с платформы 4 осуществляется через двигатель (Д) 23 и сервоусилитель (СУ) 24. Управление рычагом газа 9 с одноплатной платформы 4 осуществляется через сервомашинку (СМ) 25. Для соединения оборудования служит сетевой коммутатор (СК) 26.
Информационно-вычислительная система дистанционно-управляемого подвижного объекта функционирует следующим образом. Она решает информационные и расчетные задачи, обрабатывает и передает информацию с управляющих устройств и датчиков, а также управляет приводами исполнительных механизмов. В качестве вычислителя используется П 4, предназначенная для создания крупносерийных интеллектуальных встраиваемых систем сбора данных и управления сложными механизмами. Встраиваемые П 4 соответствуют высоким стандартам надежности и производительности. Они позволяют оперативно создавать конкурентоспособное оборудование за счет интеллектуального аппаратного обеспечения на базе ПЛИС 5. П 4 имеет ПП 16 реального времени и высокопроизводительную ПЛИС 5, а также АУ 17 и ЦУ 18 на одной плате. Все линии ввода/вывода напрямую соединены с ПЛИС 5. Это позволяет внедрять алгоритмы формирования и обработки сигналов на уровне цифровых логических схем, реализуемых внутри ПЛИС 5. Благодаря тому, что П 4 имеет открытую архитектуру, появляется возможность создания собственных модулей ввода/вывода сигналов, соответствующих специальным требованиям по вводу/выводу сигналов, а также по наличию определенных протоколов связи, необходимых для корректной работы.
К 1 служит для отработки основных алгоритмов движения, управления и ориентации в пространстве. Он собирает всю информацию, анализирует ее и передает команды управления приводам. Также решает информационные и аналитические задачи. Основным интеллектуальным элементом подвижного объекта является информационно-вычислительная система, которая координирует работу всех систем, формирует управляющие команды. В частности, исполнительные механизмы, отвечающие за отработку поворотов, направления движения, скорости, страгивания с места и остановку, получают управляющие команды от информационно-управляющей системы.
К 2 служит для обработки видеосигнала, поступающего с видеокамер 3, и дальнейшей обработки изображения. В связке с видеокамерами 3 данный компьютер работает в режиме технического зрения. К 1, К 2, П 4 информационно объединены СК26.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании информационно-вычислительной системы, обеспечивающей сбор данных и управление сложными электромеханическими системами подвижного объекта за счет интеллектуального аппаратного обеспечения.
Информационно-вычислительная система дистанционно-управляемого подвижного объекта, содержащая бортовую цифровую вычислительную машину, обеспечивающую взаимосвязь через дополнительные согласующие модули с бортовым оборудованием, проведение вычислительных процессов, работу с цифровыми электронными картами, поддержку интерфейса оператора и представление индикационно-управляющих параметров, программно-алгоритмические средства, отличающаяся тем, что информационно-вычислительная система оснащена двумя бортовыми цифровыми вычислительными машинами в виде промышленных одноплатных компьютеров: первый компьютер для обработки основных алгоритмов движения, управления, ориентации в пространстве, решения информационных и аналитических задач, второй компьютер для обработки видеосигнала, поступающего с видеокамер дистанционно-управляемого подвижного объекта, компьютеры, видеокамеры через сетевой коммутатор связаны с одноплатной платформой, сформированной на базе программируемой логической интегральной схемы и связанной с управляющими каналами правого и левого рулевого механизма, коробки переключения передач, рычага газа и информационными каналами инерциальной системы ориентации в пространстве, спутниковой навигационной системы, одометрическими и ультразвуковыми датчиками, а также с аппаратными средствами подвижного объекта: тахометром и спидометром.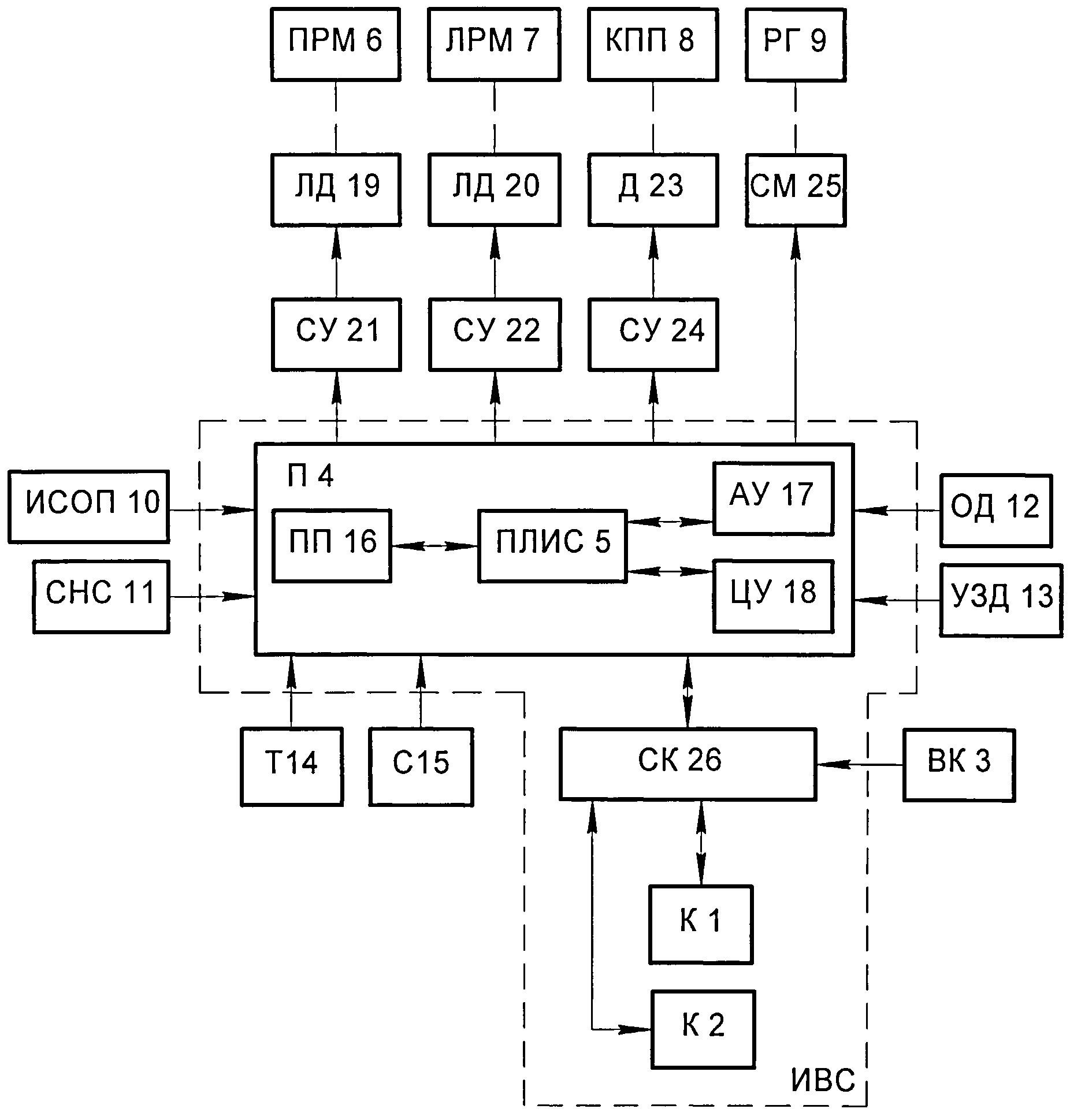
Способ удаления летучих примесей из эпоксидной смолы и устройство для его осуществления
Способ химического оксидирования стальных деталей
Способ изготовления нарезного ствола
Мультипликатор
Механизм подъема антенны
Механизм отражения стрелкового оружия
Способ автоматизированного определения навигационно-топогеодезических параметров
Осколочно-фугасная боевая часть

